- Обоснование состава и разработка структуры инерциальной навигационной системы легкового автомобиля

Содержание
- 2. Транспортное средство подвергается сопротивлениям, на преодоление которых затрачивается дополнительная энергия Под динамикой автомобиля понимают его свойство
- 3. В состав современного высокоточного навигационного комплекса должна входить автономная система, решающая задачи навигации и ориентации. Наиболее
- 4. Модель ошибок БИНС
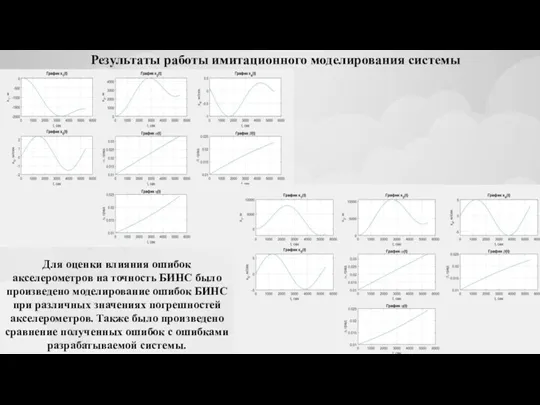
- 5. Для оценки влияния ошибок акселерометров на точность БИНС было произведено моделирование ошибок БИНС при различных значениях
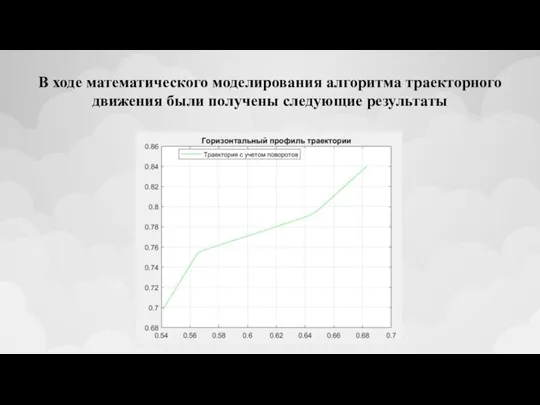
- 6. В ходе математического моделирования алгоритма траекторного движения были получены следующие результаты
- 8. Скачать презентацию
Слайд 2Транспортное средство подвергается сопротивлениям, на преодоление которых затрачивается дополнительная энергия
Под динамикой
Транспортное средство подвергается сопротивлениям, на преодоление которых затрачивается дополнительная энергия
Под динамикой
Слайд 3В состав современного высокоточного навигационного комплекса должна входить автономная система, решающая задачи
В состав современного высокоточного навигационного комплекса должна входить автономная система, решающая задачи
Слайд 4
Модель ошибок БИНС
Модель ошибок БИНС

Слайд 5Для оценки влияния ошибок акселерометров на точность БИНС было произведено моделирование ошибок
Для оценки влияния ошибок акселерометров на точность БИНС было произведено моделирование ошибок
Слайд 6В ходе математического моделирования алгоритма траекторного движения были получены следующие результаты
В ходе математического моделирования алгоритма траекторного движения были получены следующие результаты
 Весы циферблатные
Весы циферблатные 540576.pptx
540576.pptx Тепловое действие электрического тока. Закон Джоуля-Ленца
Тепловое действие электрического тока. Закон Джоуля-Ленца Развитие взглядов на строение вещества. Ядерная модель атома
Развитие взглядов на строение вещества. Ядерная модель атома Равномерное движение по окружности
Равномерное движение по окружности Физика ЕГЭ. Разбор диагностического тестирования (Занятие 1)
Физика ЕГЭ. Разбор диагностического тестирования (Занятие 1) Преобразование схем электрических цепей
Преобразование схем электрических цепей Презентация на тему Применение кристаллов
Презентация на тему Применение кристаллов  Неньютоновская жидкость
Неньютоновская жидкость Электричество и магнетизм. Электрическое поле в диэлектриках (Лекция 5)
Электричество и магнетизм. Электрическое поле в диэлектриках (Лекция 5) Законы Кирхгофа
Законы Кирхгофа Тема 1. Материя. Проект: Путёвка в жизнь
Тема 1. Материя. Проект: Путёвка в жизнь История радио
История радио Выполнение подготовки центробежного нагнетателя к ремонту
Выполнение подготовки центробежного нагнетателя к ремонту Абсолютные и относительные величины
Абсолютные и относительные величины Связь между напряженностью и напряжением. Эквипотенциальные поверхности
Связь между напряженностью и напряжением. Эквипотенциальные поверхности Допуски и посадки цилиндрических соединенийпп
Допуски и посадки цилиндрических соединенийпп Elektrotekhnika_lektsia_1_VVEdenie_v_spetsialnost
Elektrotekhnika_lektsia_1_VVEdenie_v_spetsialnost Презентация на тему Определение цены деления прибора
Презентация на тему Определение цены деления прибора  Основы гидродинамического подобия. Лекция №5
Основы гидродинамического подобия. Лекция №5 Закони Ньютона
Закони Ньютона Инфразвук - звуковая волна, частотой меньше 16 Гц
Инфразвук - звуковая волна, частотой меньше 16 Гц Презентация на тему Электромагнит
Презентация на тему Электромагнит  Характеристики тока
Характеристики тока Параметры и виды передающих оптических модулей
Параметры и виды передающих оптических модулей Колебания и волны. Лекция 3.1
Колебания и волны. Лекция 3.1 Тест. Энергия
Тест. Энергия Духовно-нравственное воспитание на уроках физики
Духовно-нравственное воспитание на уроках физики