- Радиоавтоматика. Лекция 14

Содержание
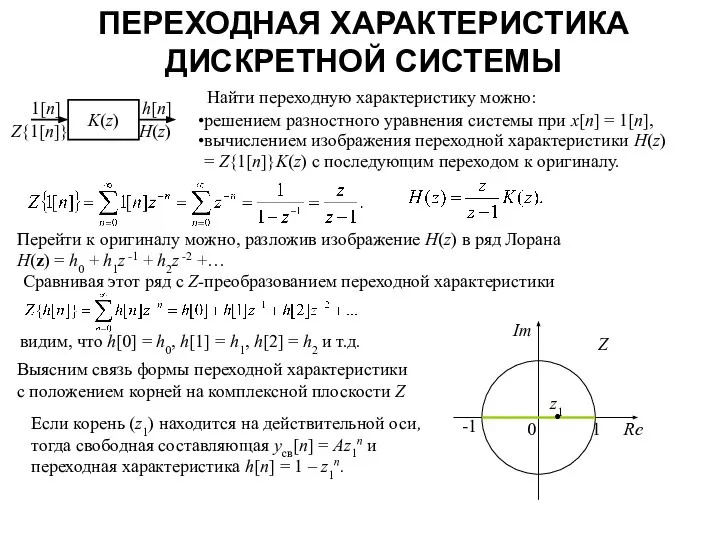
- 2. ПЕРЕХОДНАЯ ХАРАКТЕРИСТИКА ДИСКРЕТНОЙ СИСТЕМЫ Перейти к оригиналу можно, разложив изображение H(z) в ряд Лорана H(z) =
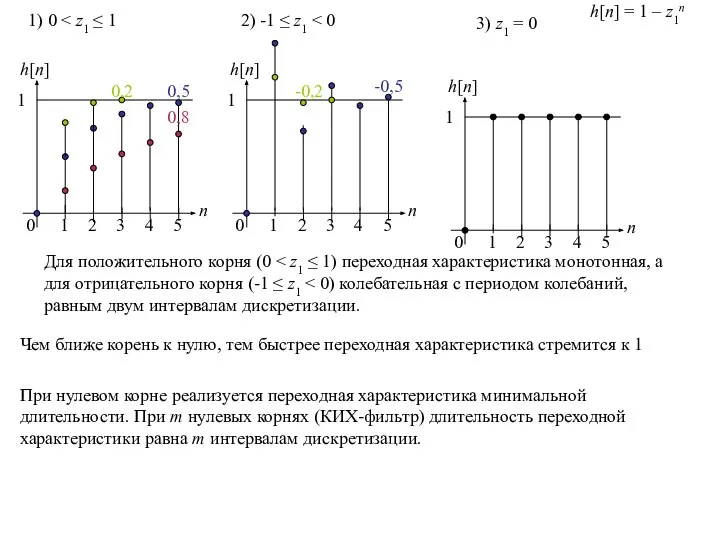
- 3. Для положительного корня (0 1) 0 2) -1 ≤ z1 3) z1 = 0 При нулевом
- 4. 4) Два комплексно – сопряженных корня h[n] = 1 – 0,5(z1n + z2n) = 1 –
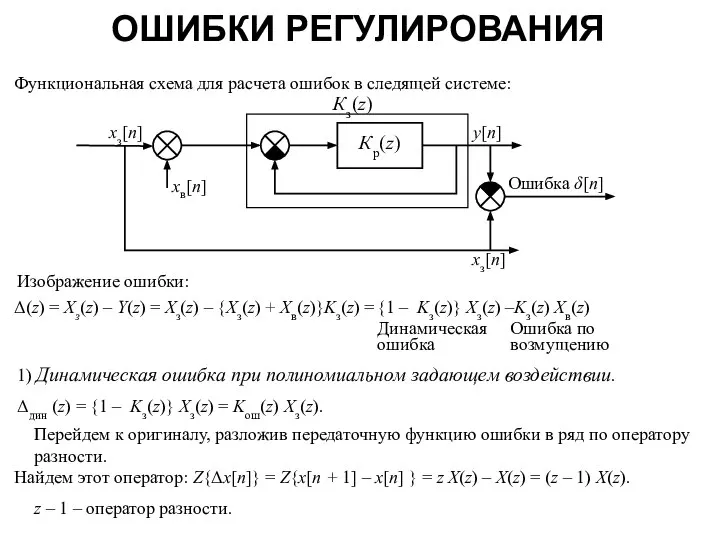
- 5. ОШИБКИ РЕГУЛИРОВАНИЯ Функциональная схема для расчета ошибок в следящей системе: Изображение ошибки: Δ(z) = Xз(z) –
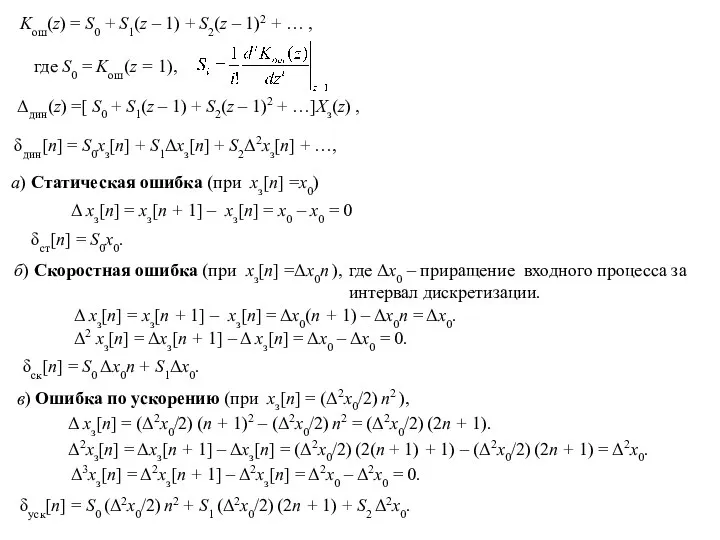
- 6. Kош(z) = S0 + S1(z – 1) + S2(z – 1)2 + … , где S0
- 8. Скачать презентацию
Слайд 2ПЕРЕХОДНАЯ ХАРАКТЕРИСТИКА ДИСКРЕТНОЙ СИСТЕМЫ
Перейти к оригиналу можно, разложив изображение H(z) в ряд
ПЕРЕХОДНАЯ ХАРАКТЕРИСТИКА ДИСКРЕТНОЙ СИСТЕМЫ
Перейти к оригиналу можно, разложив изображение H(z) в ряд
Слайд 3Для положительного корня (0 < z1 ≤ 1) переходная характеристика монотонная, а
Для положительного корня (0 < z1 ≤ 1) переходная характеристика монотонная, а
Слайд 44) Два комплексно – сопряженных корня
h[n] = 1 – 0,5(z1n + z2n)
4) Два комплексно – сопряженных корня
h[n] = 1 – 0,5(z1n + z2n)
![4) Два комплексно – сопряженных корня h[n] = 1 – 0,5(z1n +](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/925595/slide-3.jpg)
Слайд 5ОШИБКИ РЕГУЛИРОВАНИЯ
Функциональная схема для расчета ошибок в следящей системе:
Изображение ошибки:
Δ(z) = Xз(z)
ОШИБКИ РЕГУЛИРОВАНИЯ
Функциональная схема для расчета ошибок в следящей системе:
Изображение ошибки:
Δ(z) = Xз(z)
Слайд 6Kош(z) = S0 + S1(z – 1) + S2(z – 1)2 +
Kош(z) = S0 + S1(z – 1) + S2(z – 1)2 +
 Практическая работа № 4
Практическая работа № 4 Регистрация ИП
Регистрация ИП История по дороге в училище
История по дороге в училище Составление уравнений химических реакций
Составление уравнений химических реакций Милой мамочке!
Милой мамочке! Аналитический отчет1 коррекционной группыза 2011-2012 г.
Аналитический отчет1 коррекционной группыза 2011-2012 г. Семинар по проблеме:«Организация внеурочной деятельности по ФГОС в начальной школе».
Семинар по проблеме:«Организация внеурочной деятельности по ФГОС в начальной школе». Проекции прямой
Проекции прямой  Урок 2.3.2. Рассмотрение уголовного дела (стадия рассмотрения дела в судебном заседании)
Урок 2.3.2. Рассмотрение уголовного дела (стадия рассмотрения дела в судебном заседании) Пути снижения отрицательного влияния регулирующей ступени на экономичность последующих нерегулируемых ступеней паровой турбины
Пути снижения отрицательного влияния регулирующей ступени на экономичность последующих нерегулируемых ступеней паровой турбины Модальный глагол can
Модальный глагол can Презентация к уроку по русской литературе учителя Ермолаевой В.В.
Презентация к уроку по русской литературе учителя Ермолаевой В.В. Состояние электронов в атоме
Состояние электронов в атоме SWOT-анализ
SWOT-анализ Николай Семёнович Лесков (1831-1895)
Николай Семёнович Лесков (1831-1895) Знаки пожарной безопасности
Знаки пожарной безопасности Автоматическая система считывания показаний на базе GPRS
Автоматическая система считывания показаний на базе GPRS Телевидение: я выбираю или меня выбирают. Автор и руководитель проекта: Симонова Ольга Владимировна 2004 год
Телевидение: я выбираю или меня выбирают. Автор и руководитель проекта: Симонова Ольга Владимировна 2004 год Презентация на тему Растения сада 2 класс
Презентация на тему Растения сада 2 класс 074bfc5cdaf60fab3d1dc1715814a309
074bfc5cdaf60fab3d1dc1715814a309 Убеждение ОММ
Убеждение ОММ Почему мы болеем?Причины болезни.
Почему мы болеем?Причины болезни. Монтаж деталей на платах
Монтаж деталей на платах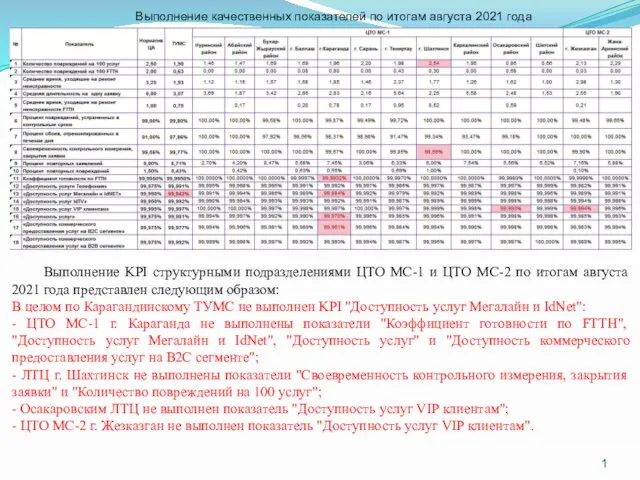 Выполнение качественных показателей по итогам августа 2021 года
Выполнение качественных показателей по итогам августа 2021 года Наблюдение за работой кафе во время пандемии
Наблюдение за работой кафе во время пандемии Быт и нравы древней Руси 16 века
Быт и нравы древней Руси 16 века Ландыш
Ландыш Санкт-Петербургская торгово-промышленная палата
Санкт-Петербургская торгово-промышленная палата