- Проектирование автоматизированной модели для сбора и сортировки опасных отходов

Содержание
- 2. 2 Цель: автоматизировать процесс сборки и сортировки опасных отходов. Задачи: 1. Сконструировать модель. 2. Создать программу
- 3. 3 Проектирование автоматизированной модели для сбора и сортировки опасных отходов 3D проектирование мобильного робота Перед сборкой
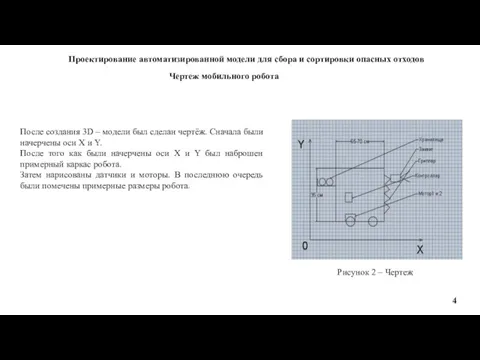
- 4. 4 Проектирование автоматизированной модели для сбора и сортировки опасных отходов Чертеж мобильного робота После создания 3D
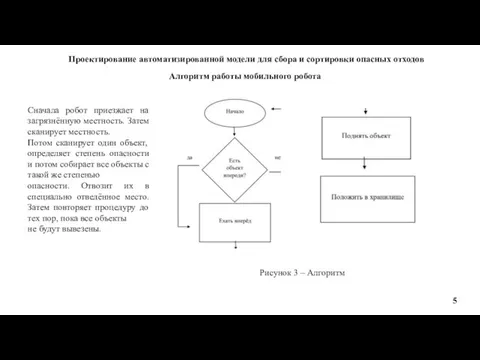
- 5. 5 Сначала робот приезжает на загрязнённую местность. Затем сканирует местность. Потом сканирует один объект, определяет степень
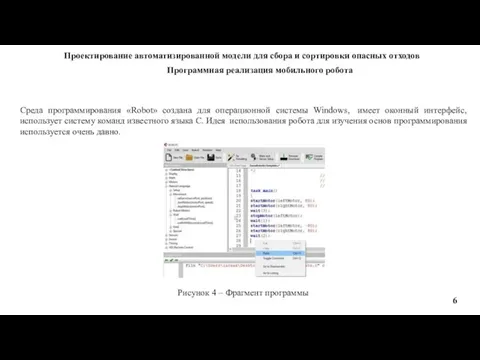
- 6. 6 Среда программирования «Robot» создана для операционной системы Windows, имеет оконный интерфейс, использует систему команд известного
- 7. 8 Себестоимость проекта Проектирование автоматизированной модели для сбора и сортировки опасных отходов Рисунок 5 – деньги
- 8. 9 За время работы была спроектирована модель мобильного робота по сбору и сортировке опасных отходов. Сначала
- 10. Скачать презентацию
Слайд 22
Цель: автоматизировать процесс сборки и сортировки опасных отходов.
Задачи:
1. Сконструировать модель.
2. Создать программу при
2
Цель: автоматизировать процесс сборки и сортировки опасных отходов.
Задачи:
1. Сконструировать модель.
2. Создать программу при
Слайд 33
Проектирование автоматизированной модели для сбора и сортировки опасных отходов
3D проектирование мобильного робота
Перед
3
Проектирование автоматизированной модели для сбора и сортировки опасных отходов
3D проектирование мобильного робота
Перед

Слайд 44
Проектирование автоматизированной модели для сбора и сортировки опасных отходов
Чертеж мобильного робота
После создания
4
Проектирование автоматизированной модели для сбора и сортировки опасных отходов
Чертеж мобильного робота
После создания
Слайд 55
Сначала робот приезжает на загрязнённую местность. Затем сканирует местность.
Потом сканирует один
5
Сначала робот приезжает на загрязнённую местность. Затем сканирует местность.
Потом сканирует один
Слайд 66
Среда программирования «Robot» создана для операционной системы Windows, имеет оконный интерфейс, использует
6
Среда программирования «Robot» создана для операционной системы Windows, имеет оконный интерфейс, использует
Слайд 78
Себестоимость проекта
Проектирование автоматизированной модели для сбора и сортировки опасных отходов
Рисунок 5
8
Себестоимость проекта
Проектирование автоматизированной модели для сбора и сортировки опасных отходов
Рисунок 5
Слайд 89
За время работы была спроектирована модель мобильного робота по сбору и сортировке
9
За время работы была спроектирована модель мобильного робота по сбору и сортировке
 Интерьерді безендіру
Интерьерді безендіру Экосистема. Ее состав
Экосистема. Ее состав Определение наличия аммиака на территории базы Тополек
Определение наличия аммиака на территории базы Тополек Сила леса. Игра
Сила леса. Игра Разделяй вместе с нами!
Разделяй вместе с нами! Растительные сообщества
Растительные сообщества Площадки для раздельного сбора вторсырья в Перми
Площадки для раздельного сбора вторсырья в Перми Особо охраняемые территории Ленинградской области
Особо охраняемые территории Ленинградской области Экологическое ассорти
Экологическое ассорти Эко косметика
Эко косметика Фонд помощи природе Арктики
Фонд помощи природе Арктики Оргагизационно-рекламное мероприятие “Эко-мода”
Оргагизационно-рекламное мероприятие “Эко-мода” Влияние человека на природу
Влияние человека на природу Вода и человек
Вода и человек Воздействие человека на природу
Воздействие человека на природу Проблема водообеспеченности в мире и источники загрязнения водных ресурсов
Проблема водообеспеченности в мире и источники загрязнения водных ресурсов Раздельный сбор отходов
Раздельный сбор отходов Красная книга как реальный инструмент охраны биоразнообразия
Красная книга как реальный инструмент охраны биоразнообразия Искусственные экосистемы
Искусственные экосистемы Неблагоприятная экологическая ситуация: Братск и Красноярск
Неблагоприятная экологическая ситуация: Братск и Красноярск Наш вклад в решение экологических проблем малой родины
Наш вклад в решение экологических проблем малой родины Экология Приморского района Санкт-Петербурга
Экология Приморского района Санкт-Петербурга Растительные сообщества, их видовой состав
Растительные сообщества, их видовой состав Пластиковые отходы: вопиющая нерациональность. Как бороться с загрязнением окружающей среды?
Пластиковые отходы: вопиющая нерациональность. Как бороться с загрязнением окружающей среды? Региональный кабинет водных ресурсов и просвещение школьников
Региональный кабинет водных ресурсов и просвещение школьников Оценка радиационной обстановки общественных мест города Смоленска
Оценка радиационной обстановки общественных мест города Смоленска Живи, родник, живи!
Живи, родник, живи! Аттестационная работа. Экологическая проблема села
Аттестационная работа. Экологическая проблема села