- Изучение кинематики горизонтальных перемещений

Содержание
- 2. Навигационные системы NAVSTAR GPS и ГЛОНАСС состоят из трёх основных подсистем:
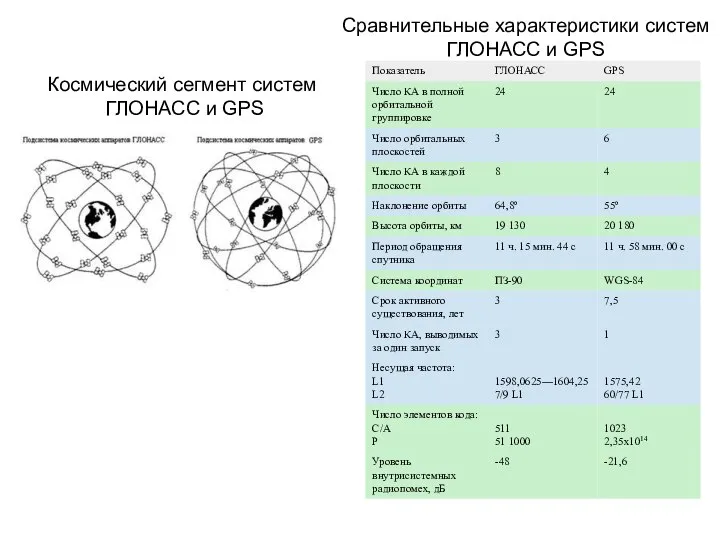
- 3. Космический сегмент систем ГЛОНАСС и GPS Сравнительные характеристики систем ГЛОНАСС и GPS
- 4. Подсистема контроля и управления состоит из: центра управления навигационной системой со своим мощным вычислительным центром развёрнутой
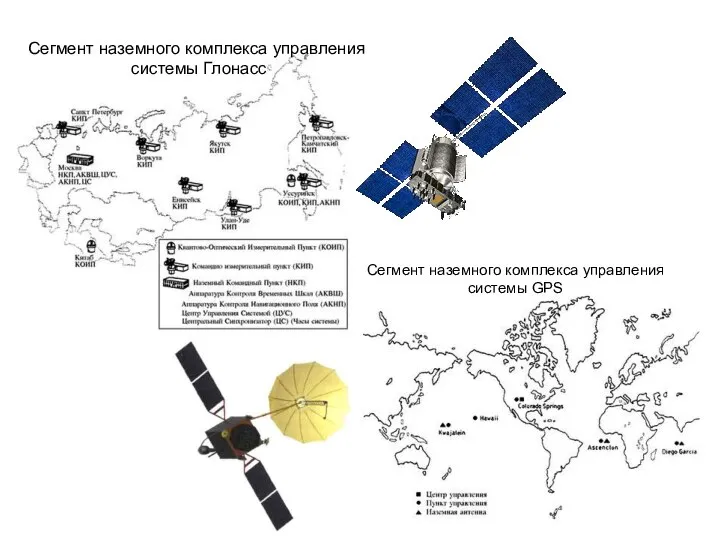
- 5. Сегмент наземного комплекса управления системы Глонасс Сегмент наземного комплекса управления системы GPS
- 6. Навигационная аппаратура потребителей состоит из навигационных приемников и устройств обработки, предназначенных для приема навигационных сигналов спутников
- 7. Примеры установки GNSS оборудования на реперных пунктах геодезической сети.
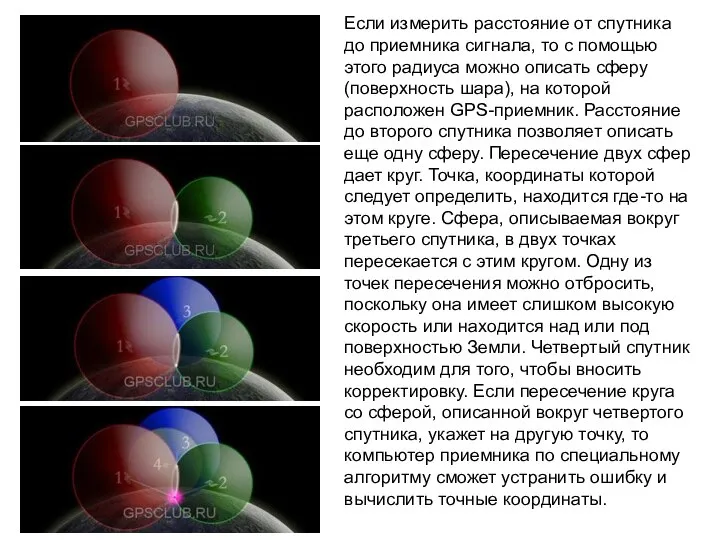
- 8. Если измерить расстояние от спутника до приемника сигнала, то с помощью этого радиуса можно описать сферу
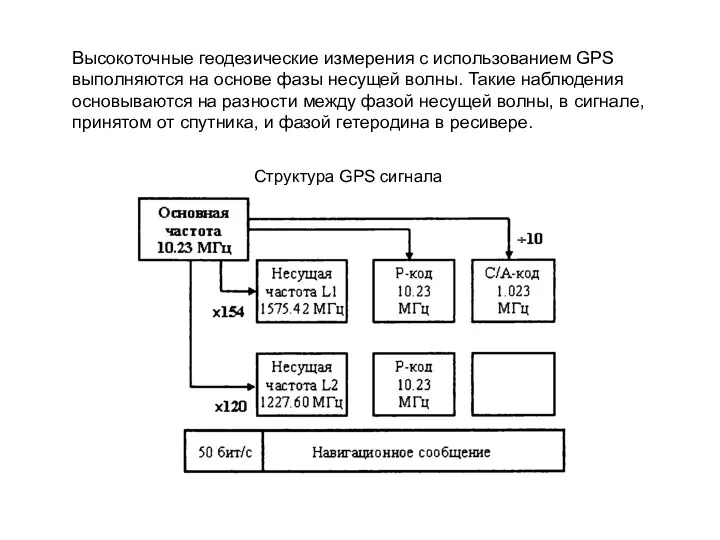
- 9. Высокоточные геодезические измерения с использованием GPS выполняются на основе фазы несущей волны. Такие наблюдения основываются на
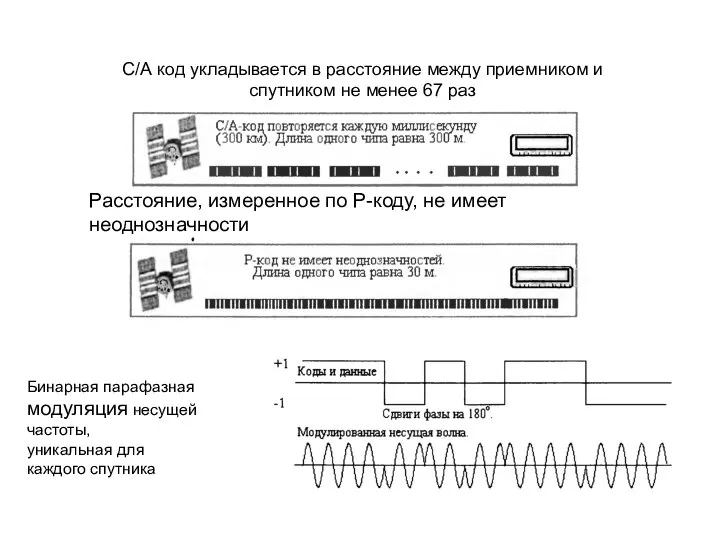
- 10. С/А код укладывается в расстояние между приемником и спутником не менее 67 раз Расстояние, измеренное по
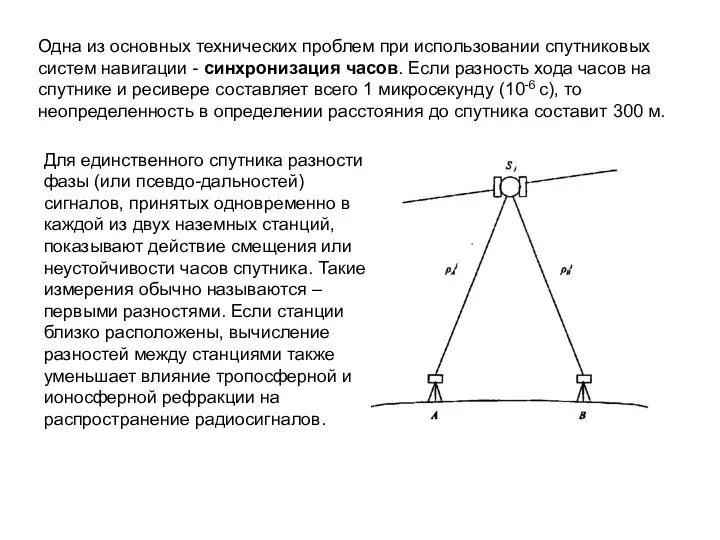
- 11. Для единственного спутника разности фазы (или псевдо-дальностей) сигналов, принятых одновременно в каждой из двух наземных станций,
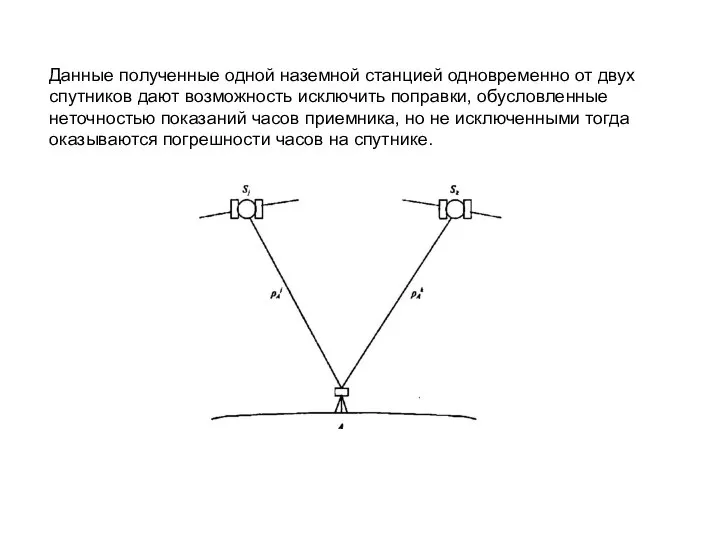
- 12. Данные полученные одной наземной станцией одновременно от двух спутников дают возможность исключить поправки, обусловленные неточностью показаний
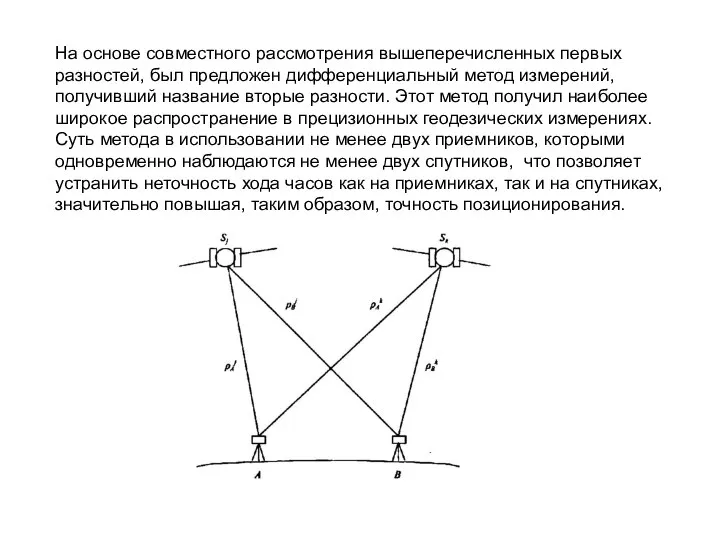
- 13. На основе совместного рассмотрения вышеперечисленных первых разностей, был предложен дифференциальный метод измерений, получивший название вторые разности.
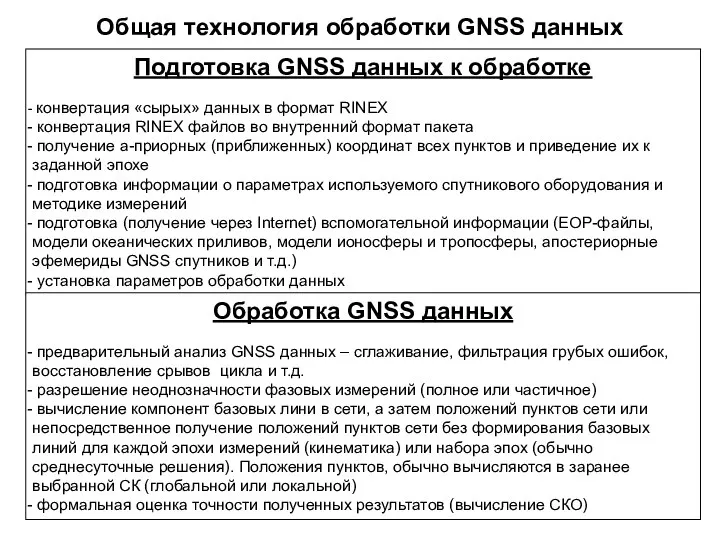
- 14. Общая технология обработки GNSS данных Подготовка GNSS данных к обработке конвертация «сырых» данных в формат RINEX
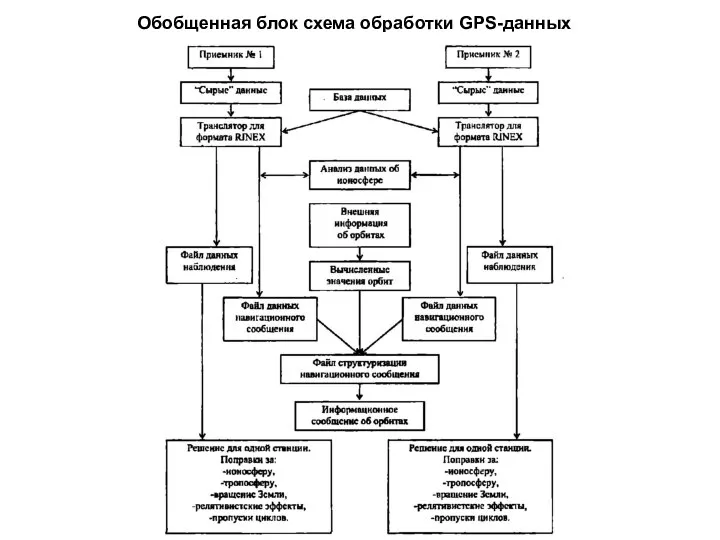
- 15. Обобщенная блок схема обработки GPS-данных
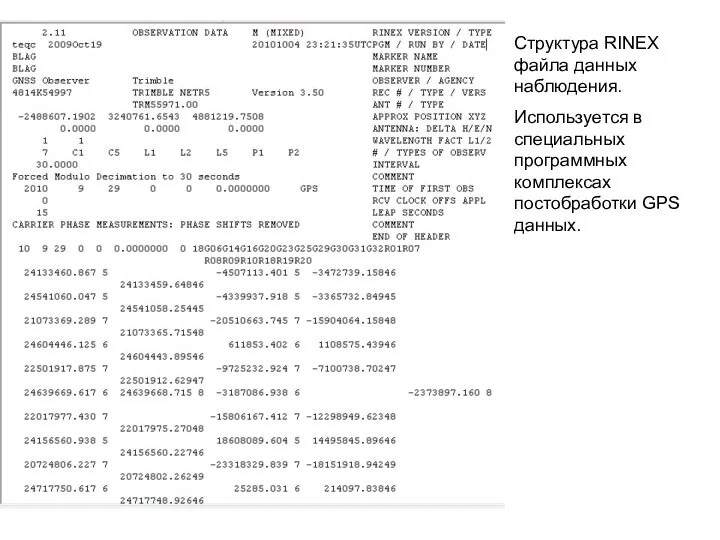
- 16. Структура RINEX файла данных наблюдения. Используется в специальных программных комплексах постобработки GPS данных.
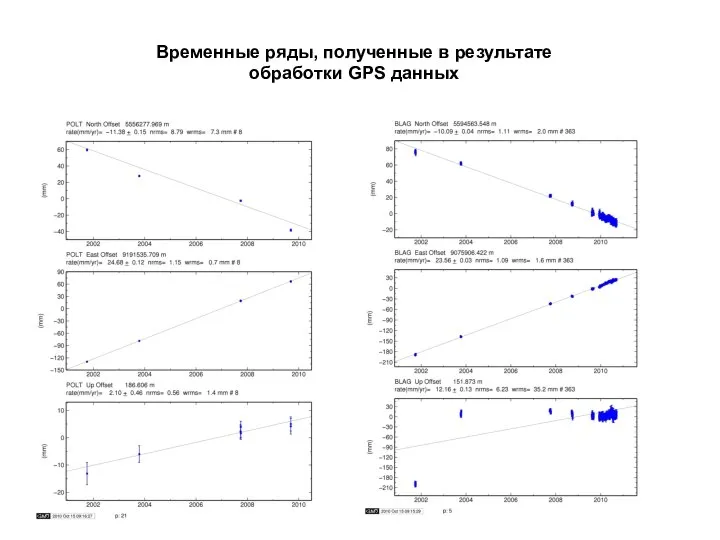
- 17. Временные ряды, полученные в результате обработки GPS данных
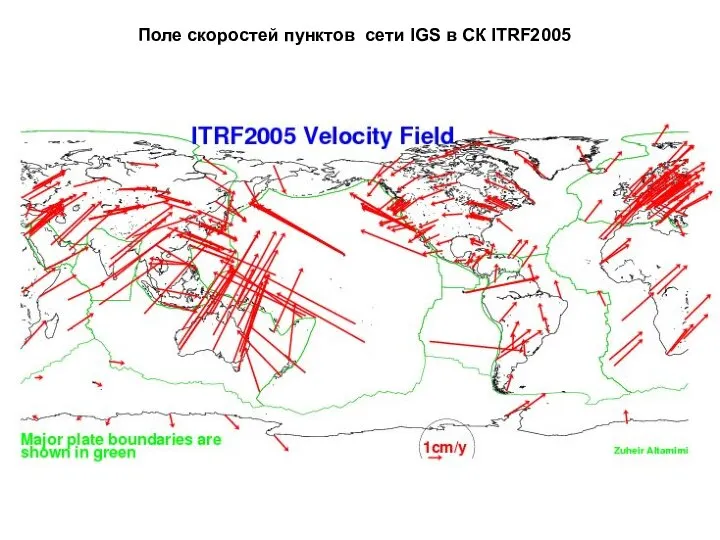
- 18. Поле скоростей пунктов сети IGS в СК ITRF2005
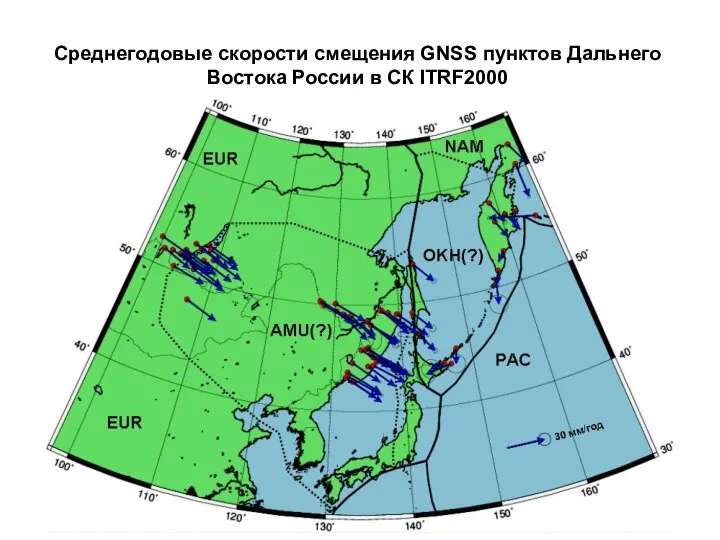
- 19. Среднегодовые скорости смещения GNSS пунктов Дальнего Востока России в СК ITRF2000
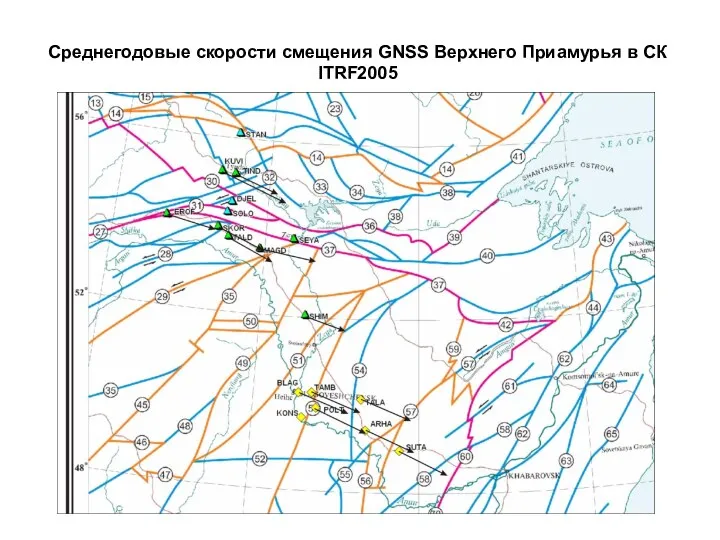
- 20. Среднегодовые скорости смещения GNSS Верхнего Приамурья в СК ITRF2005
- 21. Игнорирование деформаций земной коры может привести к:
- 23. Скачать презентацию

Слайд 3Космический сегмент систем
ГЛОНАСС и GPS
Сравнительные характеристики систем
ГЛОНАСС и GPS
Космический сегмент систем
ГЛОНАСС и GPS
Сравнительные характеристики систем
ГЛОНАСС и GPS
Слайд 4Подсистема контроля и управления состоит из:
центра управления навигационной системой со своим мощным
Подсистема контроля и управления состоит из:
центра управления навигационной системой со своим мощным
Слайд 5Сегмент наземного комплекса управления
системы Глонасс
Сегмент наземного комплекса управления
системы GPS
Сегмент наземного комплекса управления
системы Глонасс
Сегмент наземного комплекса управления
системы GPS
Слайд 6Навигационная аппаратура потребителей состоит из навигационных
приемников и устройств обработки, предназначенных для
Навигационная аппаратура потребителей состоит из навигационных
приемников и устройств обработки, предназначенных для

Слайд 7Примеры установки GNSS оборудования на реперных пунктах геодезической сети.
Примеры установки GNSS оборудования на реперных пунктах геодезической сети.

Слайд 8Если измерить расстояние от спутника до приемника сигнала, то с помощью этого
Если измерить расстояние от спутника до приемника сигнала, то с помощью этого
Слайд 9Высокоточные геодезические измерения с использованием GPS выполняются на основе фазы несущей волны.
Высокоточные геодезические измерения с использованием GPS выполняются на основе фазы несущей волны.
Слайд 10С/А код укладывается в расстояние между приемником и спутником не менее 67
С/А код укладывается в расстояние между приемником и спутником не менее 67
Слайд 11Для единственного спутника разности фазы (или псевдо-дальностей) сигналов, принятых одновременно в каждой
Для единственного спутника разности фазы (или псевдо-дальностей) сигналов, принятых одновременно в каждой
Слайд 12Данные полученные одной наземной станцией одновременно от двух спутников дают возможность исключить
Данные полученные одной наземной станцией одновременно от двух спутников дают возможность исключить
Слайд 13На основе совместного рассмотрения вышеперечисленных первых разностей, был предложен дифференциальный метод измерений,
На основе совместного рассмотрения вышеперечисленных первых разностей, был предложен дифференциальный метод измерений,
Слайд 14Общая технология обработки GNSS данных
Подготовка GNSS данных к обработке
конвертация «сырых» данных
Общая технология обработки GNSS данных
Подготовка GNSS данных к обработке
конвертация «сырых» данных
Слайд 15Обобщенная блок схема обработки GPS-данных
Обобщенная блок схема обработки GPS-данных
Слайд 16Структура RINEX файла данных наблюдения.
Используется в специальных программных комплексах постобработки GPS данных.
Структура RINEX файла данных наблюдения.
Используется в специальных программных комплексах постобработки GPS данных.
Слайд 17Временные ряды, полученные в результате обработки GPS данных
Временные ряды, полученные в результате обработки GPS данных
Слайд 18Поле скоростей пунктов сети IGS в СК ITRF2005
Поле скоростей пунктов сети IGS в СК ITRF2005
Слайд 19Среднегодовые скорости смещения GNSS пунктов Дальнего Востока России в СК ITRF2000
Среднегодовые скорости смещения GNSS пунктов Дальнего Востока России в СК ITRF2000
Слайд 20Среднегодовые скорости смещения GNSS Верхнего Приамурья в СК ITRF2005
Среднегодовые скорости смещения GNSS Верхнего Приамурья в СК ITRF2005
Слайд 21Игнорирование деформаций земной коры может привести к:
Игнорирование деформаций земной коры может привести к:

 Презентация на тему Замок Химэдзи
Презентация на тему Замок Химэдзи  Природные источники водорода
Природные источники водорода Структура леса
Структура леса Geographical location of the United States
Geographical location of the United States Prezentatsia1 (1)
Prezentatsia1 (1) Презентация на тему Страны Западной и Центральной Африки: Нигерия
Презентация на тему Страны Западной и Центральной Африки: Нигерия  Атмосфера. Опорные схемы
Атмосфера. Опорные схемы Алтайский край
Алтайский край Антропологическая классификация народов мира
Антропологическая классификация народов мира Человек в ландшафте
Человек в ландшафте Германия
Германия Китайская Народная Республика
Китайская Народная Республика Измерение атмосферного давления. Опыт Торричелли
Измерение атмосферного давления. Опыт Торричелли Строение и свойства географической оболочки. Природный комплекс
Строение и свойства географической оболочки. Природный комплекс Финно-угрские народы
Финно-угрские народы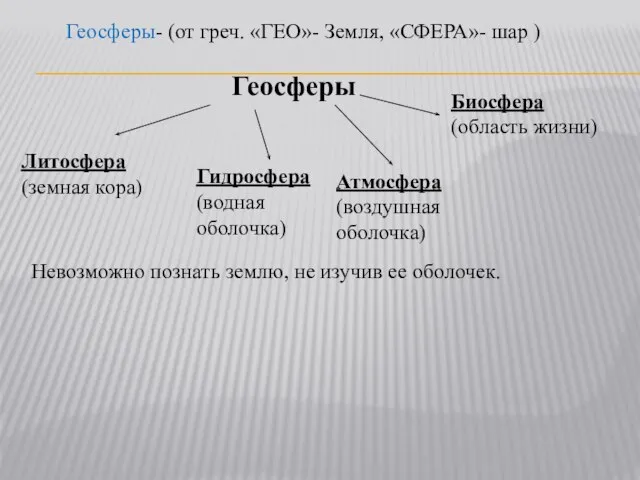 Геосферы - (от греч. ГЕО- Земля, СФЕРА - шар)
Геосферы - (от греч. ГЕО- Земля, СФЕРА - шар) Использование и охрана недр
Использование и охрана недр Выдающиеся географы и путешественники 5 класс (1)
Выдающиеся географы и путешественники 5 класс (1) Национальный парк Олимпик
Национальный парк Олимпик 20140216_vulkany
20140216_vulkany Моделирование инженерно-геоэкологических условий
Моделирование инженерно-геоэкологических условий Страна Заир
Страна Заир Основы гидрогеологии
Основы гидрогеологии Урок 13. Про воду
Урок 13. Про воду Алжир. Алжирская Сахара
Алжир. Алжирская Сахара Крым. Жемчужина у Черного моря
Крым. Жемчужина у Черного моря Западная Сибирь
Западная Сибирь Презентация на тему Тихий океан
Презентация на тему Тихий океан