- Ременные передачи

Содержание
- 2. Общие сведения о передачах Определение: Передача − устройство, предназначенное для передачи энергии из одной точки пространства
- 3. Классификация механических передач вращательного движения (2 слайда): 1. По способу передачи движения от входного вала к
- 4. 4. По характеру изменения передаточного отношения (числа): передачи с постоянным (неизменным) передаточным отношением и передачи с
- 5. Главные характеристики передач (2 слайда): мощности на входном и выходном валах - Pвх, Pвых; и их
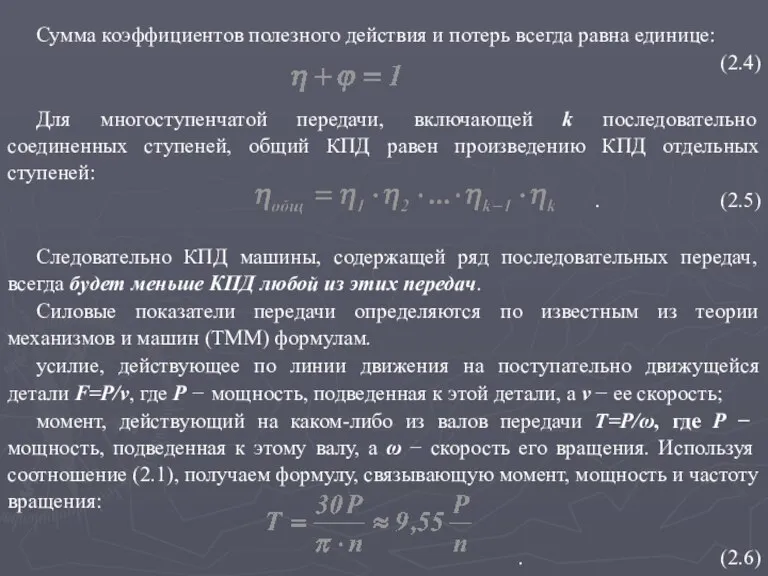
- 6. Сумма коэффициентов полезного действия и потерь всегда равна единице: (2.4) Для многоступенчатой передачи, включающей k последовательно
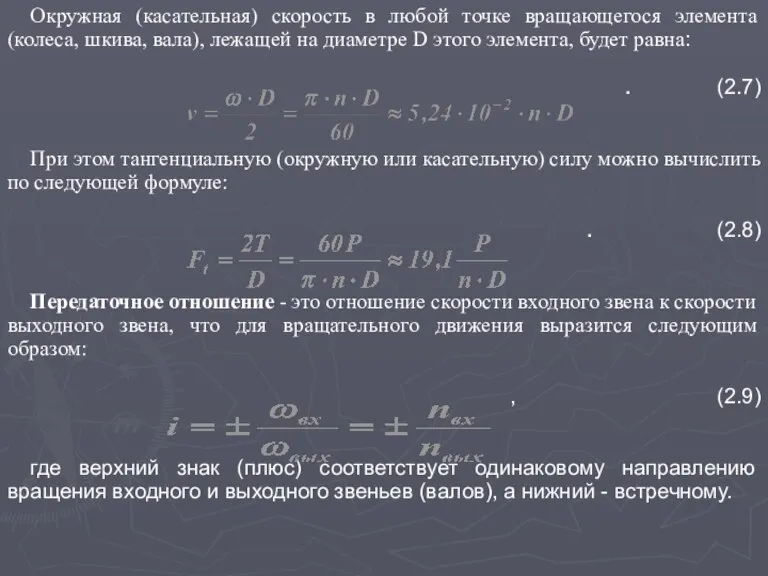
- 7. Окружная (касательная) скорость в любой точке вращающегося элемента (колеса, шкива, вала), лежащей на диаметре D этого
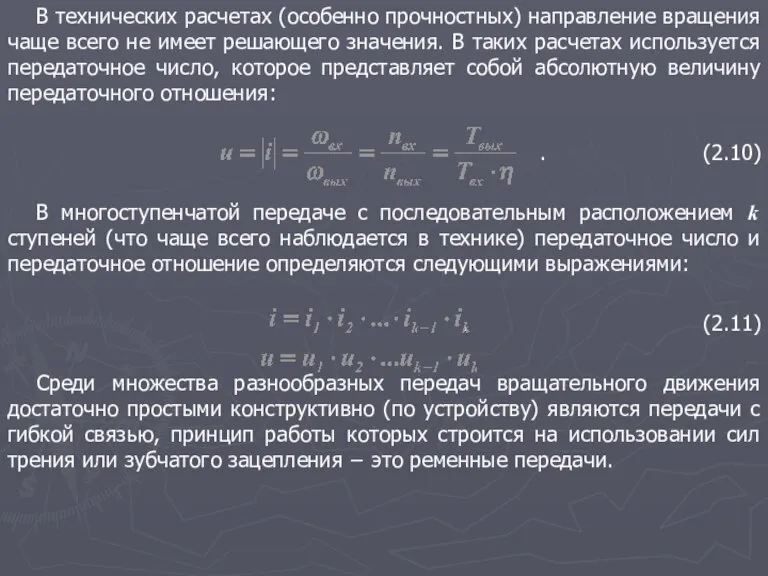
- 8. В технических расчетах (особенно прочностных) направление вращения чаще всего не имеет решающего значения. В таких расчетах
- 9. Определение: Ременная передача – это механизм, предназначенный для передачи вращательного движения посредством фрикционного взаимодействия или зубчатого
- 10. Достоинства ременных передач: 1. Простота конструкции и низкая стоимость. 2. Возможность передачи движения на достаточно большие
- 11. Классификация ременных передач (2 слайда): 1. По форме поперечного сечения ремня: 1.1 плоскоременные (поперечное сечение ремня
- 12. 3. По числу и виду шкивов, применяемых в передаче: 3.1 с одношкивными валами; 3.2 с двушкивным
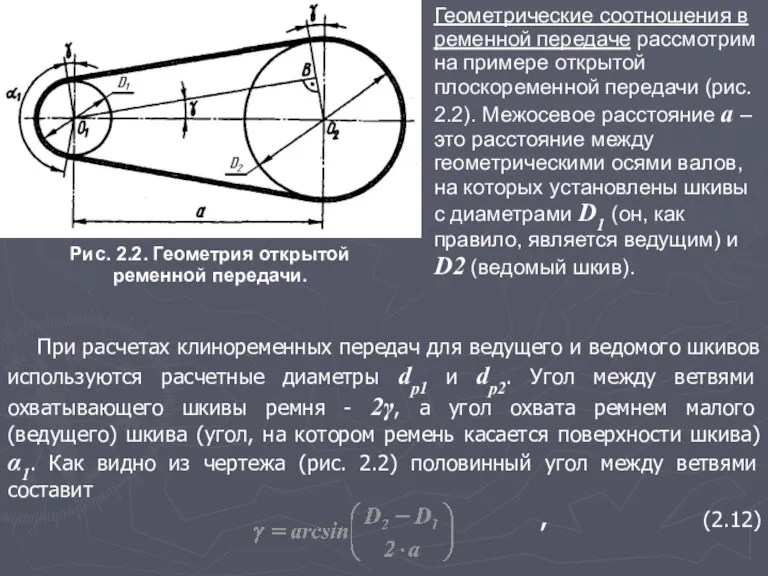
- 13. При расчетах клиноременных передач для ведущего и ведомого шкивов используются расчетные диаметры dр1 и dр2. Угол
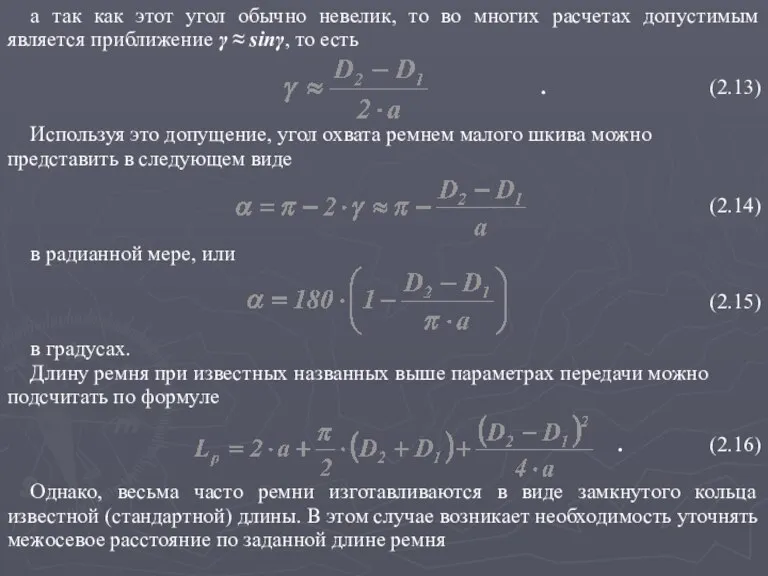
- 14. а так как этот угол обычно невелик, то во многих расчетах допустимым является приближение γ ≈
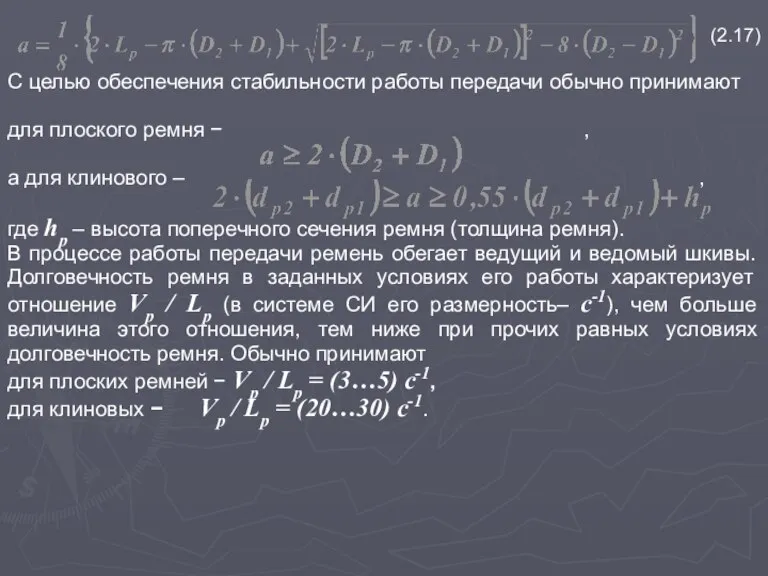
- 15. . (2.17) С целью обеспечения стабильности работы передачи обычно принимают для плоского ремня − , а
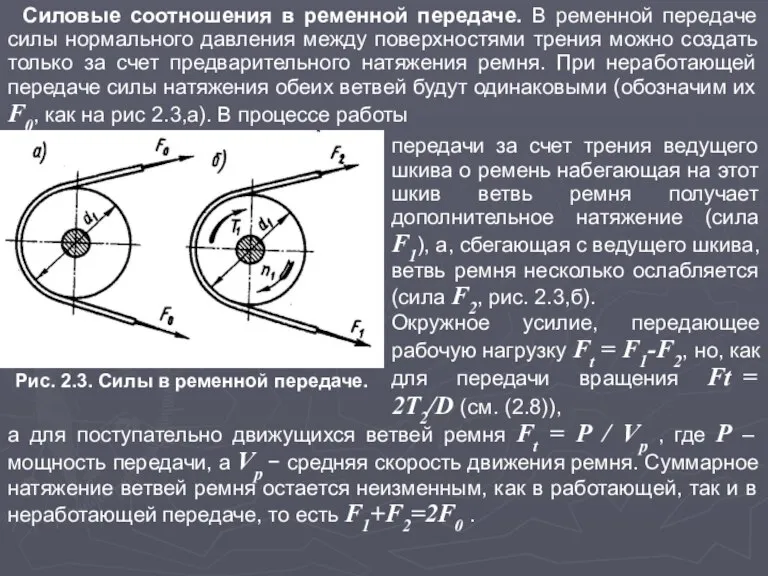
- 16. Силовые соотношения в ременной передаче. В ременной передаче силы нормального давления между поверхностями трения можно создать
- 17. Для ремня, охватывающего шкив, по формуле Эйлера F1=F2⋅ e f⋅α, где e – основание натурального логарифма
- 18. Кинематика ременной передачи. Удлинение каждого отдельно взятого элемента ремня меняется в зависимости от того, на какую
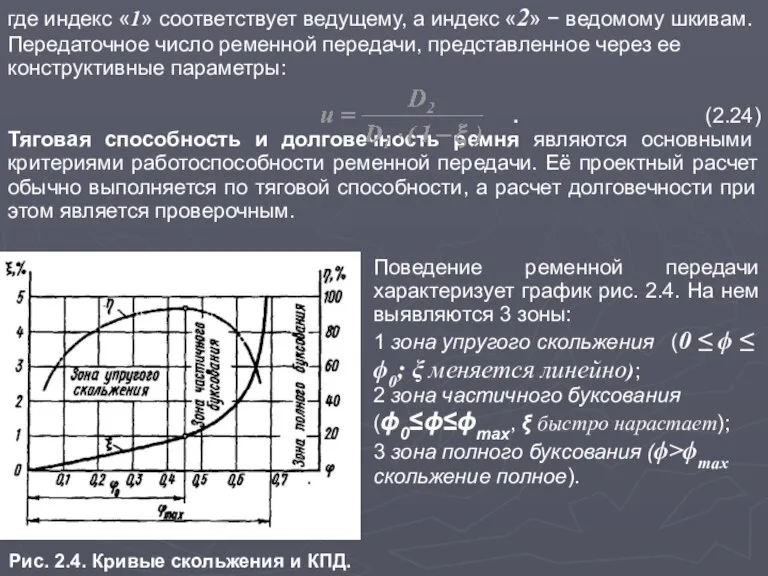
- 19. где индекс «1» соответствует ведущему, а индекс «2» − ведомому шкивам. Передаточное число ременной передачи, представленное
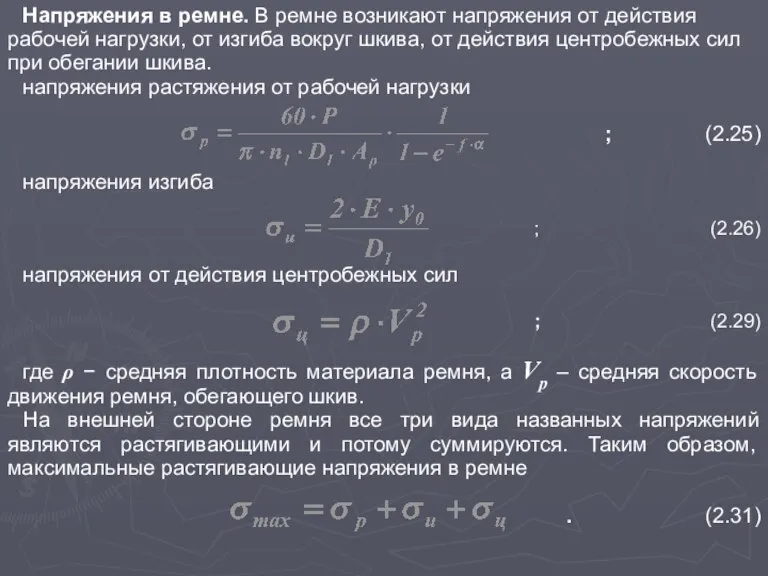
- 20. Напряжения в ремне. В ремне возникают напряжения от действия рабочей нагрузки, от изгиба вокруг шкива, от
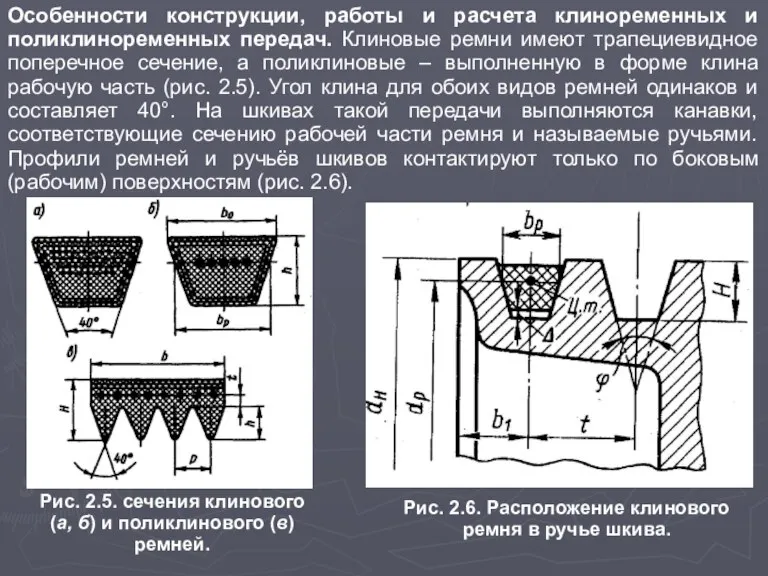
- 21. Особенности конструкции, работы и расчета клиноременных и поликлиноременных передач. Клиновые ремни имеют трапециевидное поперечное сечение, а
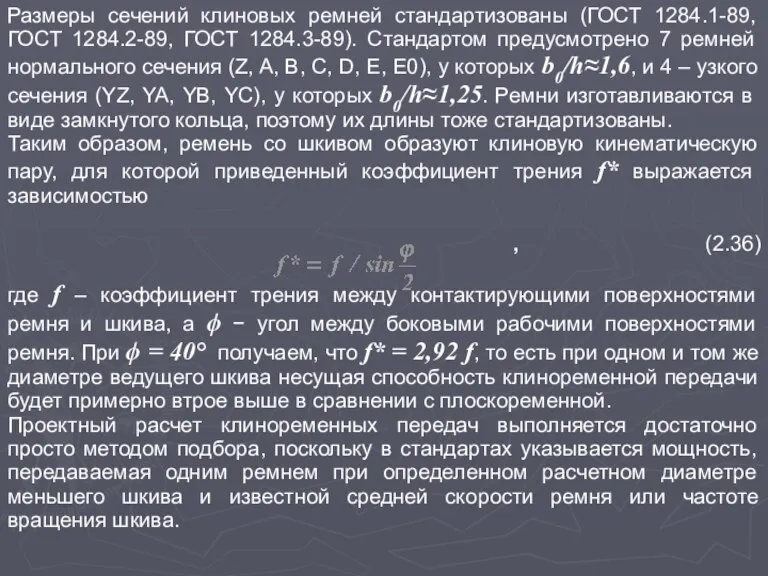
- 22. Размеры сечений клиновых ремней стандартизованы (ГОСТ 1284.1-89, ГОСТ 1284.2-89, ГОСТ 1284.3-89). Стандартом предусмотрено 7 ремней нормального
- 24. Скачать презентацию
Слайд 2Общие сведения о передачах
Определение:
Передача − устройство, предназначенное для передачи энергии из одной
Общие сведения о передачах
Определение:
Передача − устройство, предназначенное для передачи энергии из одной
Слайд 3Классификация механических передач вращательного движения (2 слайда):
1. По способу передачи движения от
Классификация механических передач вращательного движения (2 слайда):
1. По способу передачи движения от
Слайд 44. По характеру изменения передаточного отношения (числа): передачи с постоянным (неизменным) передаточным
4. По характеру изменения передаточного отношения (числа): передачи с постоянным (неизменным) передаточным
Слайд 5Главные характеристики передач (2 слайда):
мощности на входном и выходном валах - Pвх,
Главные характеристики передач (2 слайда):
мощности на входном и выходном валах - Pвх,

Слайд 6Сумма коэффициентов полезного действия и потерь всегда равна единице:
(2.4)
Для многоступенчатой передачи, включающей
Сумма коэффициентов полезного действия и потерь всегда равна единице:
(2.4)
Для многоступенчатой передачи, включающей
Слайд 7Окружная (касательная) скорость в любой точке вращающегося элемента (колеса, шкива, вала), лежащей
Окружная (касательная) скорость в любой точке вращающегося элемента (колеса, шкива, вала), лежащей
Слайд 8В технических расчетах (особенно прочностных) направление вращения чаще всего не имеет решающего
В технических расчетах (особенно прочностных) направление вращения чаще всего не имеет решающего
Слайд 9Определение:
Ременная передача – это механизм, предназначенный для передачи вращательного движения посредством фрикционного
Определение:
Ременная передача – это механизм, предназначенный для передачи вращательного движения посредством фрикционного

Слайд 10Достоинства ременных передач:
1. Простота конструкции и низкая стоимость.
2. Возможность передачи
Достоинства ременных передач:
1. Простота конструкции и низкая стоимость.
2. Возможность передачи
Слайд 11Классификация ременных передач (2 слайда):
1. По форме поперечного сечения ремня:
1.1 плоскоременные
Классификация ременных передач (2 слайда):
1. По форме поперечного сечения ремня:
1.1 плоскоременные
Слайд 123. По числу и виду шкивов, применяемых в передаче:
3.1 с одношкивными
3. По числу и виду шкивов, применяемых в передаче:
3.1 с одношкивными
Слайд 13При расчетах клиноременных передач для ведущего и ведомого шкивов используются расчетные диаметры
При расчетах клиноременных передач для ведущего и ведомого шкивов используются расчетные диаметры
Слайд 14а так как этот угол обычно невелик, то во многих расчетах допустимым
а так как этот угол обычно невелик, то во многих расчетах допустимым
Слайд 15. (2.17)
С целью обеспечения стабильности работы передачи обычно принимают
для плоского ремня − ,
С целью обеспечения стабильности работы передачи обычно принимают
для плоского ремня − ,
Слайд 16Силовые соотношения в ременной передаче. В ременной передаче силы нормального давления между
Силовые соотношения в ременной передаче. В ременной передаче силы нормального давления между
Слайд 17Для ремня, охватывающего шкив, по формуле Эйлера F1=F2⋅ e f⋅α, где e
Для ремня, охватывающего шкив, по формуле Эйлера F1=F2⋅ e f⋅α, где e
Слайд 18Кинематика ременной передачи. Удлинение каждого отдельно взятого элемента ремня меняется в зависимости
Кинематика ременной передачи. Удлинение каждого отдельно взятого элемента ремня меняется в зависимости
Слайд 19где индекс «1» соответствует ведущему, а индекс «2» − ведомому шкивам.
Передаточное число
где индекс «1» соответствует ведущему, а индекс «2» − ведомому шкивам.
Передаточное число
Слайд 20Напряжения в ремне. В ремне возникают напряжения от действия рабочей нагрузки, от
Напряжения в ремне. В ремне возникают напряжения от действия рабочей нагрузки, от
Слайд 21Особенности конструкции, работы и расчета клиноременных и поликлиноременных передач. Клиновые ремни имеют
Особенности конструкции, работы и расчета клиноременных и поликлиноременных передач. Клиновые ремни имеют
Слайд 22Размеры сечений клиновых ремней стандартизованы (ГОСТ 1284.1-89, ГОСТ 1284.2-89, ГОСТ 1284.3-89). Стандартом
Размеры сечений клиновых ремней стандартизованы (ГОСТ 1284.1-89, ГОСТ 1284.2-89, ГОСТ 1284.3-89). Стандартом
 Правописание суффиксов -ик-, -ек-
Правописание суффиксов -ик-, -ек- Летопись народного единения. Виртуальная выставка
Летопись народного единения. Виртуальная выставка МОУ «ООШ с.Никольское Духовницкого района Саратовской области» Теорема Пифагора
МОУ «ООШ с.Никольское Духовницкого района Саратовской области» Теорема Пифагора Суворов Дмитрий Пройдаков ЕвгенийКазаков Дмитрий Жуков Роман Баданов Сергей Картавый Павел Иконников Евгений.
Суворов Дмитрий Пройдаков ЕвгенийКазаков Дмитрий Жуков Роман Баданов Сергей Картавый Павел Иконников Евгений. Организационно-технические требования по охране труда
Организационно-технические требования по охране труда Творчество Б. Акунина
Творчество Б. Акунина Sea battle. Шаблон
Sea battle. Шаблон Тарханы: родные всё места
Тарханы: родные всё места Общие способы получения металлов
Общие способы получения металлов Презентация на тему Семейство Губоцветные
Презентация на тему Семейство Губоцветные Обучение в рамках квоты целевого приема от компании Апатит
Обучение в рамках квоты целевого приема от компании Апатит Лепка из пластилина. Резьба по кости
Лепка из пластилина. Резьба по кости Реализация общеобразовательной программы дошкольного образования в условиях семейной группы
Реализация общеобразовательной программы дошкольного образования в условиях семейной группы Корень n-ой степени
Корень n-ой степени Анализ ассортимента и качества детского питания, реализуемого в торговом предприятии
Анализ ассортимента и качества детского питания, реализуемого в торговом предприятии Задача «Угадайка». Требуется написать программу для игры «Угадайка». По условиям игры программа «загадывает» некоторое целое чис
Задача «Угадайка». Требуется написать программу для игры «Угадайка». По условиям игры программа «загадывает» некоторое целое чис Psikhologia_Avtosokhranenny
Psikhologia_Avtosokhranenny India - English Transit
India - English Transit Метод проектирования: комбинирование.Модели-аналоги.
Метод проектирования: комбинирование.Модели-аналоги. Особенности организации и технологий образовательного процесса на основе ФГОС 2 поколения. Лекция 1-2
Особенности организации и технологий образовательного процесса на основе ФГОС 2 поколения. Лекция 1-2 Русские народные костюмы
Русские народные костюмы Трудности в обучении письму и чтению по системе Брайля
Трудности в обучении письму и чтению по системе Брайля 2011 год Всероссийский конкурс имени Д.И. Менделеева
2011 год Всероссийский конкурс имени Д.И. Менделеева Круговая теория любви Рейса
Круговая теория любви Рейса Гаврила Романович Державин Жизнь и творчество поэта
Гаврила Романович Державин Жизнь и творчество поэта Херсоне́с Таври́ческий
Херсоне́с Таври́ческий Презентация на тему Банки на рынке ценных бумаг
Презентация на тему Банки на рынке ценных бумаг Лекция 1-2 ИРЛК. Презентация Microsoft Office PowerPoint
Лекция 1-2 ИРЛК. Презентация Microsoft Office PowerPoint