- Роботы в современном мире: успехи, проблемы, перспективы

Содержание
- 2. Об определении [Handbook of Robotics]: robotics – intelligent connection between perception and action [ГОСТ]: 1) Исполнительный
- 3. Общая классификация Промышленные Сервисные Специальные (Field) Домашние Развлечения
- 4. Причины применения снижение себестоимости товара Экономические: Эксплуатационные (функциональные): Социальные: обеспечение уровня качества продукции, недоступного среднему работнику
- 5. Жизненный цикл Разработка Интеграция Эксплуатация ->Выведение из эксплуатации Настройка/подготовка
- 6. Декомпозиция Конструкция Электроника Система управления Сенсорная система Системы обеспечения
- 7. Промышленные роботы автомобилестроение, самолётостроение, пищевая, Отрасли: Проблемы разработки: Проблемы внедрения: повышение грузоподъёмности оптимизация рабочей зоны (вглубь)
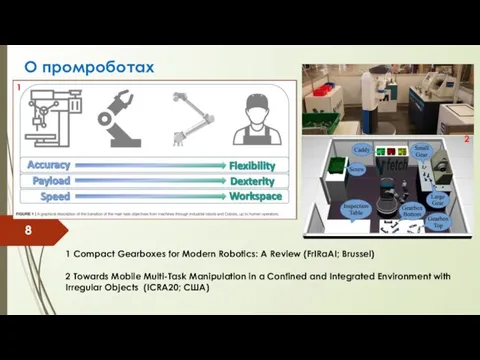
- 8. 2 Towards Mobile Multi-Task Manipulation in a Confined and Integrated Environment with Irregular Objects (ICRA20; США)
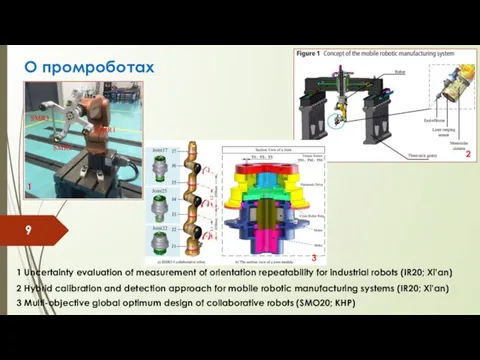
- 9. О промроботах 2 Hybrid calibration and detection approach for mobile robotic manufacturing systems (IR20; Xi’an) 1
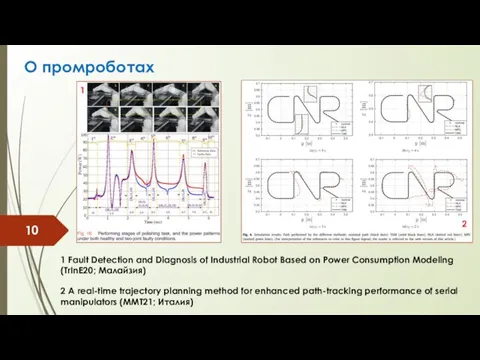
- 10. О промроботах 2 A real-time trajectory planning method for enhanced path-tracking performance of serial manipulators (MMT21;
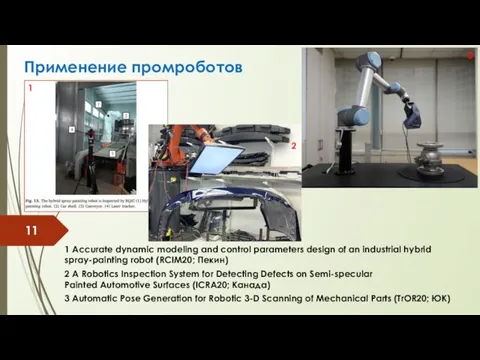
- 11. Применение промроботов 1 Accurate dynamic modeling and control parameters design of an industrial hybrid spray-painting robot
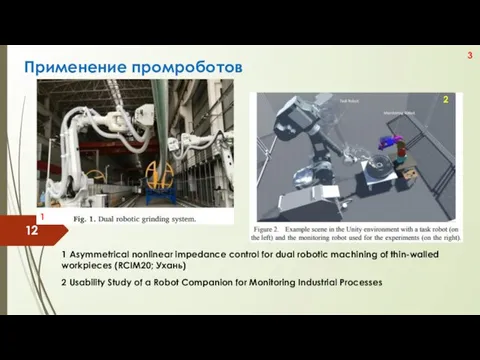
- 12. Применение промроботов 1 Asymmetrical nonlinear impedance control for dual robotic machining of thin-walled workpieces (RCIM20; Ухань)
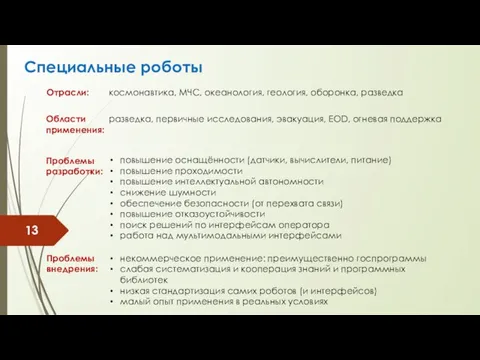
- 13. Специальные роботы космонавтика, МЧС, океанология, геология, оборонка, разведка Отрасли: Проблемы разработки: Проблемы внедрения: повышение оснащённости (датчики,
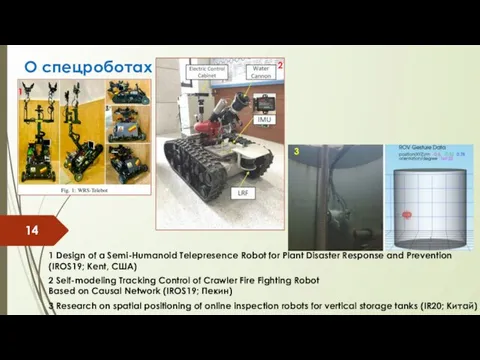
- 14. О спецроботах 1 Design of a Semi-Humanoid Telepresence Robot for Plant Disaster Response and Prevention (IROS19;
- 15. Сервисные роботы логистика, сельское хозяйство, добывающая промышленность, коммунальная сфера (клининг etc), медицина Отрасли: Проблемы разработки: Проблемы
- 16. Применение сервисных роботов 1 2 2 Position-based Impedance Control of a 2-DOF Compliant Manipulator for a
- 17. Применение сервисных роботов 1 Assistive Gym: A Physics Simulation Framework for Assistive Robotics (ICRA20, США-разное) 1
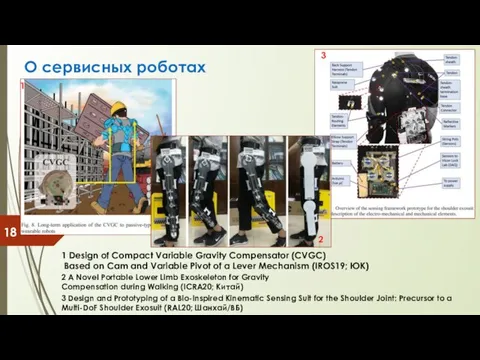
- 18. О сервисных роботах 1 Design of Compact Variable Gravity Compensator (CVGC) Based on Cam and Variable
- 19. О сервисных роботах Multifunctional Remotely Actuated 3-DOF Supernumerary Robotic Arm Based on Magnetorheological Clutches and Hydrostatic
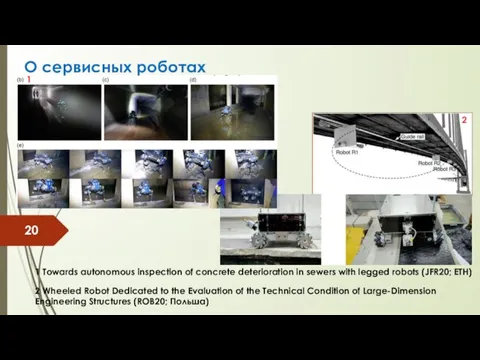
- 20. О сервисных роботах 1 2 1 Towards autonomous inspection of concrete deterioration in sewers with legged
- 21. Декомпозиция научных задач Ни один научный материал нельзя описать одним ключевым словом, требуется указать: Компонент: сенсоры
- 22. Инновации COBRA: COllaborative Bot with multi-Rotor Actuation (IROS19; Fl-USA)
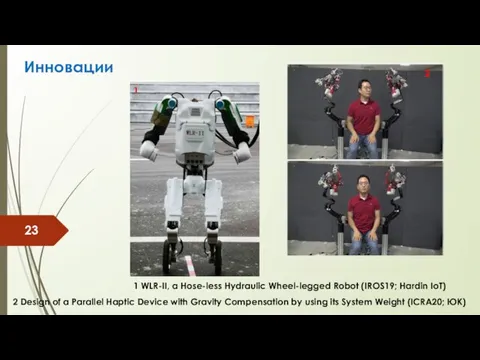
- 23. Инновации 1 WLR-II, a Hose-less Hydraulic Wheel-legged Robot (IROS19; Hardin IoT) 2 Design of a Parallel
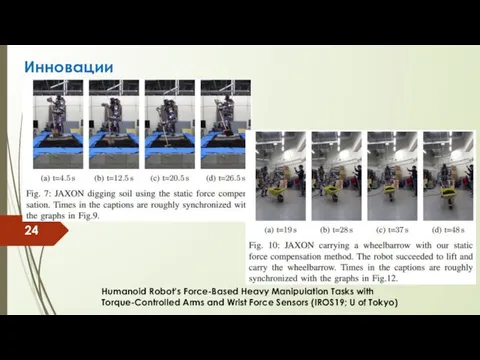
- 24. Инновации Humanoid Robot’s Force-Based Heavy Manipulation Tasks with Torque-Controlled Arms and Wrist Force Sensors (IROS19; U
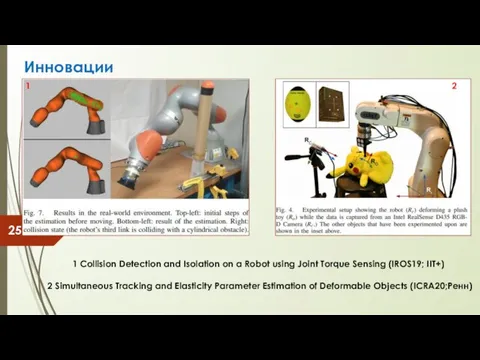
- 25. Инновации 1 Collision Detection and Isolation on a Robot using Joint Torque Sensing (IROS19; IIT+) 1
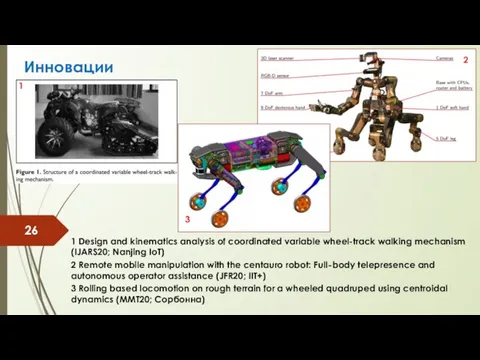
- 26. Инновации 1 Design and kinematics analysis of coordinated variable wheel-track walking mechanism (IJARS20; Nanjing IoT) 1
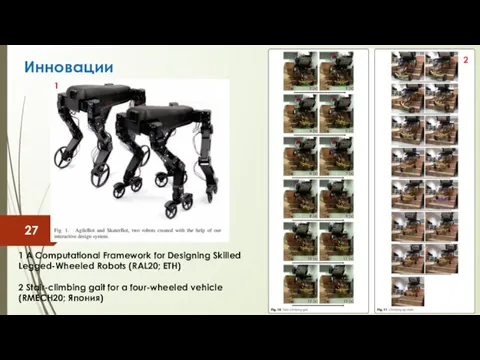
- 27. Инновации 1 A Computational Framework for Designing Skilled Legged-Wheeled Robots (RAL20; ETH) 1 2 Stair-climbing gait
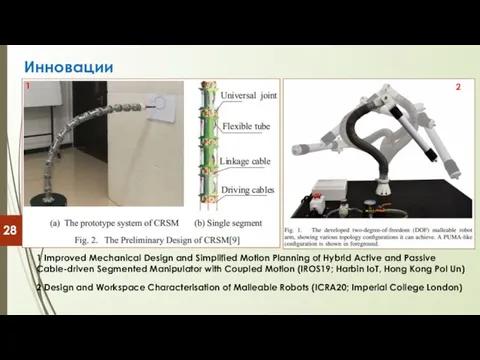
- 28. Инновации 1 Improved Mechanical Design and Simplified Motion Planning of Hybrid Active and Passive Cable-driven Segmented
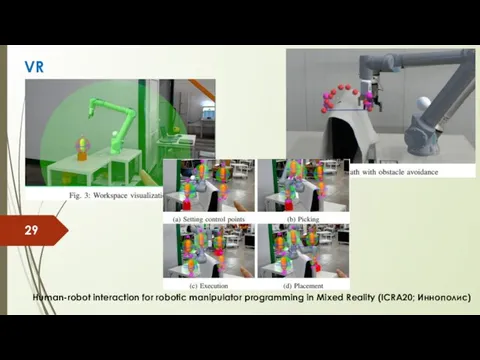
- 29. VR Human-robot interaction for robotic manipulator programming in Mixed Reality (ICRA20; Иннополис)
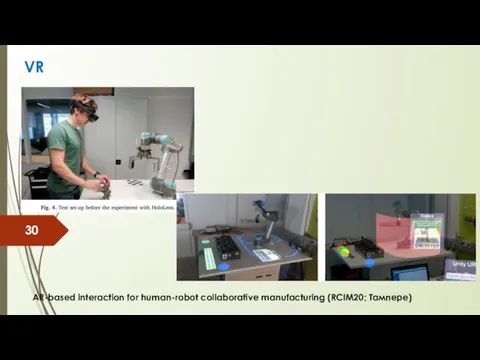
- 30. VR AR-based interaction for human-robot collaborative manufacturing (RCIM20; Тампере)
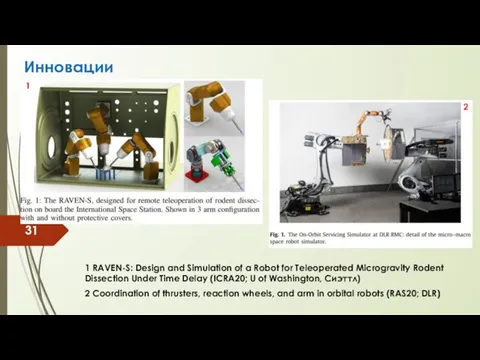
- 31. Инновации 1 RAVEN-S: Design and Simulation of a Robot for Teleoperated Microgravity Rodent Dissection Under Time
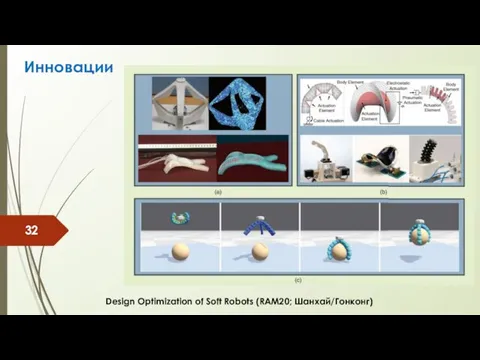
- 32. Инновации Design Optimization of Soft Robots (RAM20; Шанхай/Гонконг)
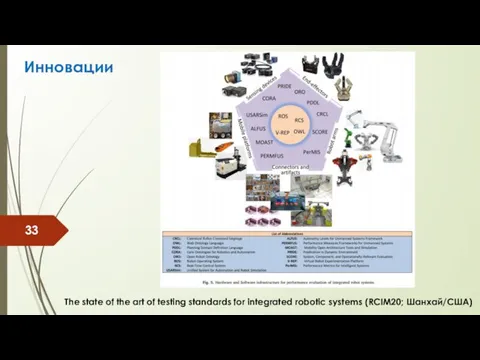
- 33. Инновации The state of the art of testing standards for integrated robotic systems (RCIM20; Шанхай/США)
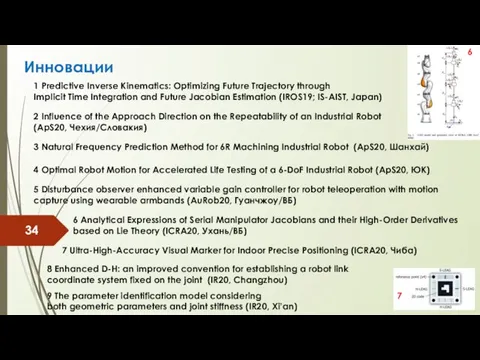
- 34. Инновации 1 Predictive Inverse Kinematics: Optimizing Future Trajectory through Implicit Time Integration and Future Jacobian Estimation
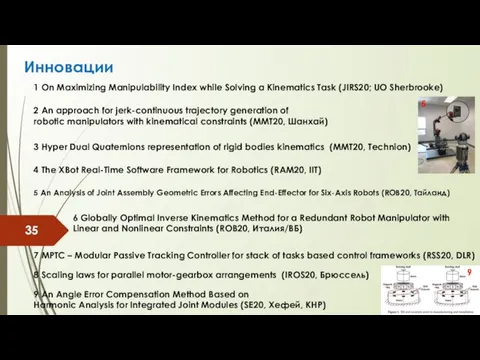
- 35. Инновации 1 On Maximizing Manipulability Index while Solving a Kinematics Task (JIRS20; UO Sherbrooke) 2 An
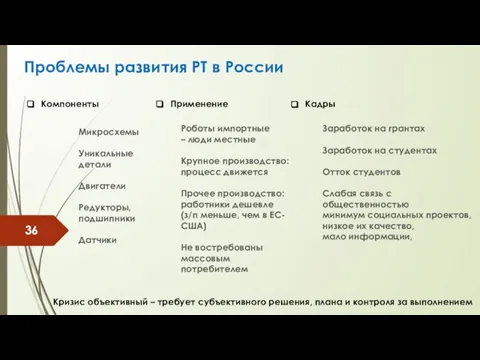
- 36. Проблемы развития РТ в России Компоненты Микросхемы Уникальные детали Двигатели Редукторы, подшипники Датчики Применение Кадры Заработок
- 37. Зачем идти в РТ гранты, комиссии, кафедры Академическая сфера: трудоустройство в компанию/основание собственной Интеграция: Карьера за
- 38. Мировые лидеры Компании: Лаборатории: Университеты: MIT, Stanford, TUM, Oxford, QUT, IIT, OSU, Sapienza + профессоры
- 39. Представление результатов International Federation of Robotics (IFR) – финансы [IEEE] Robotics and Automation Society (RAS) International
- 40. Информационные ресурсы Springer Handbook of Robotics (2ed) Springer Tracts in Advanced Robotics Robot Dynamics and Control
- 41. Информационные ресурсы Каналы Youtube: PRO роботов, MATLAB, Northwestern Robotics, AwesomeTech, Brian Douglas, IRIM Lab Koreatech, Canadian
- 43. Скачать презентацию
Слайд 2Об определении
[Handbook of Robotics]: robotics – intelligent connection between perception and action
[ГОСТ]:
Об определении
[Handbook of Robotics]: robotics – intelligent connection between perception and action
[ГОСТ]:
![Об определении [Handbook of Robotics]: robotics – intelligent connection between perception and](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/896054/slide-1.jpg)
Слайд 3Общая классификация
Промышленные
Сервисные
Специальные (Field)
Домашние
Развлечения
Общая классификация
Промышленные
Сервисные
Специальные (Field)
Домашние
Развлечения

Слайд 4Причины применения
снижение себестоимости товара
Экономические:
Эксплуатационные
(функциональные):
Социальные:
обеспечение уровня качества продукции, недоступного среднему работнику
замещение человека в
Причины применения
снижение себестоимости товара
Экономические:
Эксплуатационные
(функциональные):
Социальные:
обеспечение уровня качества продукции, недоступного среднему работнику
замещение человека в
Слайд 5Жизненный цикл
Разработка
Интеграция
Эксплуатация
->Выведение из эксплуатации
Настройка/подготовка
Жизненный цикл
Разработка
Интеграция
Эксплуатация
->Выведение из эксплуатации
Настройка/подготовка

Слайд 6Декомпозиция
Конструкция
Электроника
Система управления
Сенсорная система
Системы обеспечения
Декомпозиция
Конструкция
Электроника
Система управления
Сенсорная система
Системы обеспечения

Слайд 7Промышленные роботы
автомобилестроение, самолётостроение, пищевая,
Отрасли:
Проблемы разработки:
Проблемы внедрения:
повышение грузоподъёмности
оптимизация рабочей зоны (вглубь)
повышение точности
Промышленные роботы
автомобилестроение, самолётостроение, пищевая,
Отрасли:
Проблемы разработки:
Проблемы внедрения:
повышение грузоподъёмности
оптимизация рабочей зоны (вглубь)
повышение точности
Слайд 82 Towards Mobile Multi-Task Manipulation in a Confined and Integrated Environment with
2 Towards Mobile Multi-Task Manipulation in a Confined and Integrated Environment with
Слайд 9О промроботах
2 Hybrid calibration and detection approach for mobile robotic manufacturing systems
О промроботах
2 Hybrid calibration and detection approach for mobile robotic manufacturing systems
Слайд 10О промроботах
2 A real-time trajectory planning method for enhanced path-tracking performance of
О промроботах
2 A real-time trajectory planning method for enhanced path-tracking performance of
Слайд 11Применение промроботов
1 Accurate dynamic modeling and control parameters design of an industrial
Применение промроботов
1 Accurate dynamic modeling and control parameters design of an industrial
Слайд 12Применение промроботов
1 Asymmetrical nonlinear impedance control for dual robotic machining of thin-walled
Применение промроботов
1 Asymmetrical nonlinear impedance control for dual robotic machining of thin-walled
Слайд 13Специальные роботы
космонавтика, МЧС, океанология, геология, оборонка, разведка
Отрасли:
Проблемы разработки:
Проблемы внедрения:
повышение оснащённости (датчики,
Специальные роботы
космонавтика, МЧС, океанология, геология, оборонка, разведка
Отрасли:
Проблемы разработки:
Проблемы внедрения:
повышение оснащённости (датчики,
Слайд 14О спецроботах
1 Design of a Semi-Humanoid Telepresence Robot for Plant Disaster Response
О спецроботах
1 Design of a Semi-Humanoid Telepresence Robot for Plant Disaster Response
Слайд 15Сервисные роботы
логистика, сельское хозяйство, добывающая промышленность, коммунальная сфера (клининг etc), медицина
Отрасли:
Проблемы разработки:
Проблемы
Сервисные роботы
логистика, сельское хозяйство, добывающая промышленность, коммунальная сфера (клининг etc), медицина
Отрасли:
Проблемы разработки:
Проблемы
Слайд 16Применение сервисных роботов
1
2
2 Position-based Impedance Control of a 2-DOF Compliant
Применение сервисных роботов
1
2
2 Position-based Impedance Control of a 2-DOF Compliant

Слайд 17Применение сервисных роботов
1 Assistive Gym: A Physics Simulation Framework for Assistive Robotics
Применение сервисных роботов
1 Assistive Gym: A Physics Simulation Framework for Assistive Robotics

Слайд 18О сервисных роботах
1 Design of Compact Variable Gravity Compensator (CVGC)
Based on
О сервисных роботах
1 Design of Compact Variable Gravity Compensator (CVGC)
Based on
Слайд 19О сервисных роботах
Multifunctional Remotely Actuated 3-DOF Supernumerary Robotic Arm Based on
Magnetorheological Clutches
О сервисных роботах
Multifunctional Remotely Actuated 3-DOF Supernumerary Robotic Arm Based on
Magnetorheological Clutches

Слайд 20О сервисных роботах
1
2
1 Towards autonomous inspection of concrete deterioration in
О сервисных роботах
1
2
1 Towards autonomous inspection of concrete deterioration in
Слайд 21Декомпозиция научных задач
Ни один научный материал нельзя описать одним ключевым словом, требуется
Декомпозиция научных задач
Ни один научный материал нельзя описать одним ключевым словом, требуется
Слайд 22Инновации
COBRA: COllaborative Bot with multi-Rotor Actuation (IROS19; Fl-USA)
Инновации
COBRA: COllaborative Bot with multi-Rotor Actuation (IROS19; Fl-USA)

Слайд 23Инновации
1 WLR-II, a Hose-less Hydraulic Wheel-legged Robot (IROS19; Hardin IoT)
2 Design of
Инновации
1 WLR-II, a Hose-less Hydraulic Wheel-legged Robot (IROS19; Hardin IoT)
2 Design of
Слайд 24Инновации
Humanoid Robot’s Force-Based Heavy Manipulation Tasks with
Torque-Controlled Arms and Wrist Force Sensors
Инновации
Humanoid Robot’s Force-Based Heavy Manipulation Tasks with
Torque-Controlled Arms and Wrist Force Sensors
Слайд 25Инновации
1 Collision Detection and Isolation on a Robot using Joint Torque Sensing
Инновации
1 Collision Detection and Isolation on a Robot using Joint Torque Sensing
Слайд 26Инновации
1 Design and kinematics analysis of coordinated variable wheel-track walking mechanism
(IJARS20;
Инновации
1 Design and kinematics analysis of coordinated variable wheel-track walking mechanism (IJARS20;
Слайд 27Инновации
1 A Computational Framework for Designing Skilled Legged-Wheeled Robots (RAL20; ETH)
1
2 Stair-climbing
Инновации
1 A Computational Framework for Designing Skilled Legged-Wheeled Robots (RAL20; ETH)
1
2 Stair-climbing
Слайд 28Инновации
1 Improved Mechanical Design and Simplified Motion Planning of Hybrid Active and
Инновации
1 Improved Mechanical Design and Simplified Motion Planning of Hybrid Active and
Слайд 29VR
Human-robot interaction for robotic manipulator programming in Mixed Reality (ICRA20; Иннополис)
VR
Human-robot interaction for robotic manipulator programming in Mixed Reality (ICRA20; Иннополис)
Слайд 30VR
AR-based interaction for human-robot collaborative manufacturing (RCIM20; Тампере)
VR
AR-based interaction for human-robot collaborative manufacturing (RCIM20; Тампере)
Слайд 31Инновации
1 RAVEN-S: Design and Simulation of a Robot for Teleoperated Microgravity Rodent
Инновации
1 RAVEN-S: Design and Simulation of a Robot for Teleoperated Microgravity Rodent
Слайд 32Инновации
Design Optimization of Soft Robots (RAM20; Шанхай/Гонконг)
Инновации
Design Optimization of Soft Robots (RAM20; Шанхай/Гонконг)
Слайд 33Инновации
The state of the art of testing standards for integrated robotic systems
Инновации
The state of the art of testing standards for integrated robotic systems
Слайд 34Инновации
1 Predictive Inverse Kinematics: Optimizing Future Trajectory through
Implicit Time Integration and Future
Инновации
1 Predictive Inverse Kinematics: Optimizing Future Trajectory through
Implicit Time Integration and Future
Слайд 35Инновации
1 On Maximizing Manipulability Index while Solving a Kinematics Task (JIRS20; UO
Инновации
1 On Maximizing Manipulability Index while Solving a Kinematics Task (JIRS20; UO
Слайд 36Проблемы развития РТ в России
Компоненты
Микросхемы
Уникальные детали
Двигатели
Редукторы, подшипники
Датчики
Применение
Кадры
Заработок на грантах
Заработок на студентах
Отток студентов
Слабая
Проблемы развития РТ в России
Компоненты
Микросхемы
Уникальные детали
Двигатели
Редукторы, подшипники
Датчики
Применение
Кадры
Заработок на грантах
Заработок на студентах
Отток студентов
Слабая
Слайд 37Зачем идти в РТ
гранты, комиссии, кафедры
Академическая сфера:
трудоустройство в компанию/основание собственной
Интеграция:
Карьера за рубежом:
желательно
Зачем идти в РТ
гранты, комиссии, кафедры
Академическая сфера:
трудоустройство в компанию/основание собственной
Интеграция:
Карьера за рубежом:
желательно
Слайд 38Мировые лидеры
Компании:
Лаборатории:
Университеты:
MIT, Stanford, TUM, Oxford, QUT, IIT, OSU, Sapienza + профессоры
Мировые лидеры
Компании:
Лаборатории:
Университеты:
MIT, Stanford, TUM, Oxford, QUT, IIT, OSU, Sapienza + профессоры

Слайд 39Представление результатов
International Federation of Robotics (IFR) – финансы
[IEEE] Robotics and Automation Society
Представление результатов
International Federation of Robotics (IFR) – финансы
[IEEE] Robotics and Automation Society
![Представление результатов International Federation of Robotics (IFR) – финансы [IEEE] Robotics and](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/896054/slide-38.jpg)
Слайд 40Информационные ресурсы
Springer Handbook of Robotics (2ed)
Springer Tracts in Advanced Robotics
Robot Dynamics and
Информационные ресурсы
Springer Handbook of Robotics (2ed)
Springer Tracts in Advanced Robotics
Robot Dynamics and
Слайд 41Информационные ресурсы
Каналы Youtube:
PRO роботов, MATLAB, Northwestern Robotics, AwesomeTech,
Brian Douglas, IRIM Lab
Информационные ресурсы
Каналы Youtube:
PRO роботов, MATLAB, Northwestern Robotics, AwesomeTech, Brian Douglas, IRIM Lab
 Вода - главный источник жизни
Вода - главный источник жизни Презентация на тему Все про медведей
Презентация на тему Все про медведей Интерактивная игра-викторина О чем расскажет памятник…
Интерактивная игра-викторина О чем расскажет памятник… ustanovka_denvera
ustanovka_denvera День Конституции. Интерактивная викторина - раскраска
День Конституции. Интерактивная викторина - раскраска Все народы воспевают материнство
Все народы воспевают материнство Понятие и виды временной нетрудоспособности. Пособия
Понятие и виды временной нетрудоспособности. Пособия Презентация на тему Урок Photoshop
Презентация на тему Урок Photoshop Семейный бюджет
Семейный бюджет 1136315
1136315 Презентация на тему Чудеса архитектуры
Презентация на тему Чудеса архитектуры  Создание единого китайского государства
Создание единого китайского государства Анималистика в творчестве Л. В. Позена
Анималистика в творчестве Л. В. Позена СИСТЕМА РАБОТЫ МОУ ГИМНАЗИЯ №5 ПО ДУХОВНО-НРАВСТВЕННОМУ ВОСПИТАНИЮ И РЕЛИГИОВЕДЧЕСКОМУ ОБРАЗОВАНИЮ2011г.
СИСТЕМА РАБОТЫ МОУ ГИМНАЗИЯ №5 ПО ДУХОВНО-НРАВСТВЕННОМУ ВОСПИТАНИЮ И РЕЛИГИОВЕДЧЕСКОМУ ОБРАЗОВАНИЮ2011г. Основные направления введения нормативно-подушевого финансирования и новой системы оплаты труда педагогических работников
Основные направления введения нормативно-подушевого финансирования и новой системы оплаты труда педагогических работников Справочник колориста. Описание цветных компонентов
Справочник колориста. Описание цветных компонентов Тестируем производительность: результаты нагрузочного тестирования, выполненного компаниями «1С-Битрикс», «Онтико» и .masterhost
Тестируем производительность: результаты нагрузочного тестирования, выполненного компаниями «1С-Битрикс», «Онтико» и .masterhost Проведение капитального ремонта на участке железной дороги, содержащем водопропускные сооружения
Проведение капитального ремонта на участке железной дороги, содержащем водопропускные сооружения Менеджмент. Основные понятия
Менеджмент. Основные понятия Внимание!
Внимание! ПЕДАГОГИЧЕСКИЙ СОВЕТНА ТЕМУ
ПЕДАГОГИЧЕСКИЙ СОВЕТНА ТЕМУ МедСофт 2009 Андрей Хаустов Менеджер по развитию бизнеса Департамент комплексных мобильных решений Email:
МедСофт 2009 Андрей Хаустов Менеджер по развитию бизнеса Департамент комплексных мобильных решений Email:  Создание проекта Zend
Создание проекта Zend План муниципальной площадки по образовательной области Физическое развития для инструкторов ФИЗО г. Чебоксары
План муниципальной площадки по образовательной области Физическое развития для инструкторов ФИЗО г. Чебоксары Цветовое решение интерьера гостиничных номеров. Практическая № 19
Цветовое решение интерьера гостиничных номеров. Практическая № 19 Теории научения в современной психологии
Теории научения в современной психологии Приемная кампания 2012
Приемная кампания 2012 Конкурскультурно-образовательных инициатив
Конкурскультурно-образовательных инициатив