- Seminar_1

Содержание
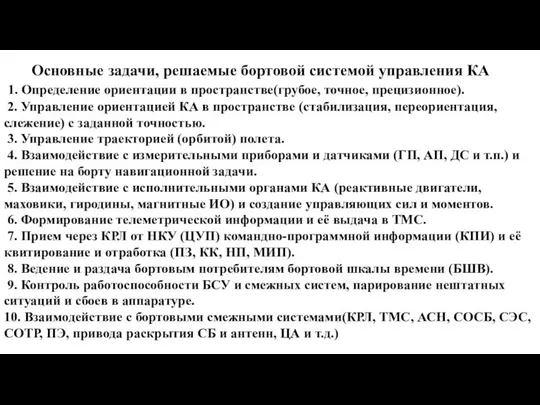
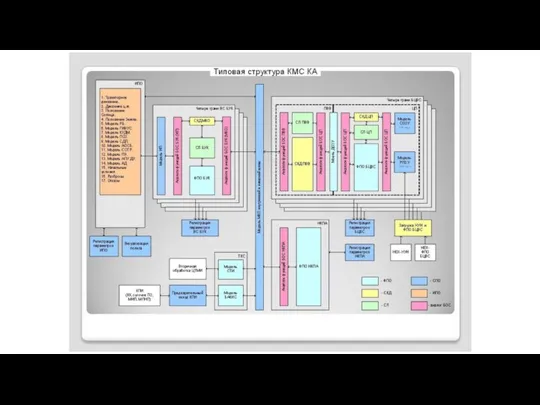
- 5. Основные задачи, решаемые бортовой системой управления КА 1. Определение ориентации в пространстве(грубое, точное, прецизионное). 2. Управление
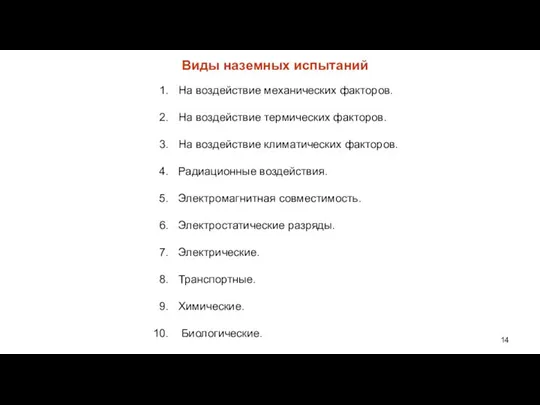
- 14. Виды наземных испытаний На воздействие механических факторов. На воздействие термических факторов. На воздействие климатических факторов. Радиационные
- 17. ПЭВМ ПЭВМ ИПО Алгоритмы ФПО Начальные условия и программа моделирования Обработанные результаты моделирования и ТМИ ПО
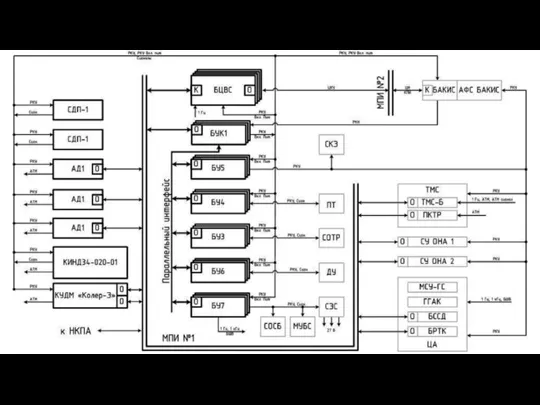
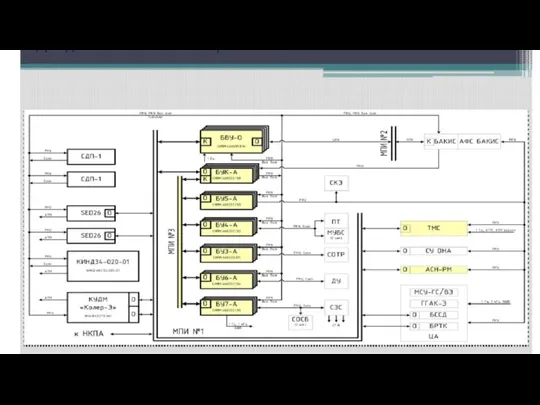
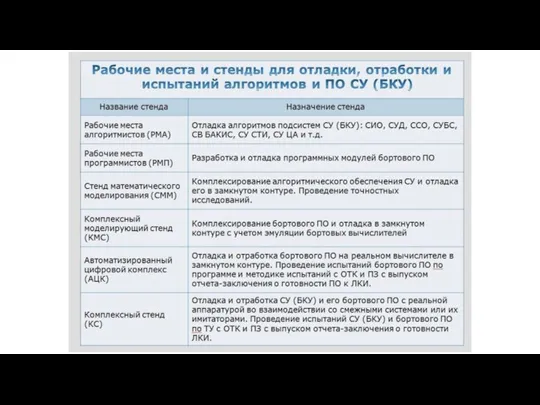
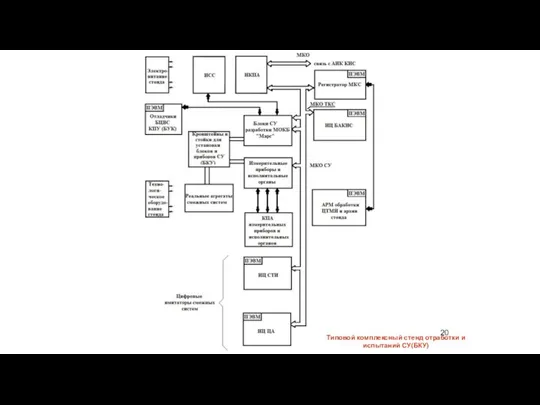
- 20. Типовой комплексный стенд отработки и испытаний СУ(БКУ)
- 25. Скачать презентацию

Слайд 5 Основные задачи, решаемые бортовой системой управления КА
1. Определение ориентации в
Основные задачи, решаемые бортовой системой управления КА
1. Определение ориентации в


Слайд 14Виды наземных испытаний
На воздействие механических факторов.
На воздействие термических факторов.
На воздействие климатических
Виды наземных испытаний
На воздействие механических факторов.
На воздействие термических факторов.
На воздействие климатических
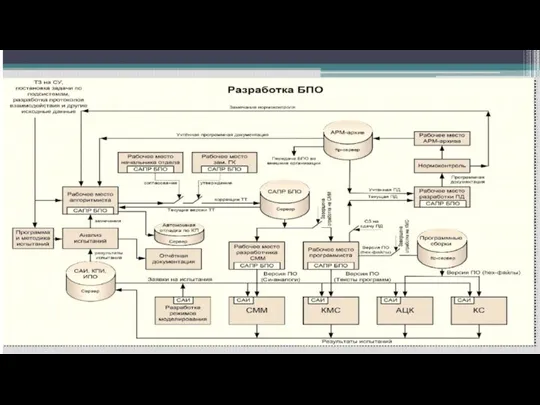
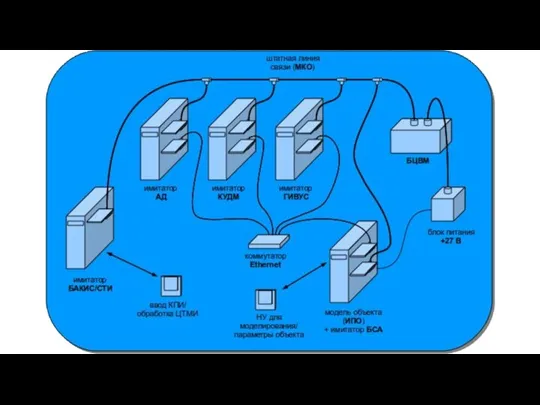
Слайд 17ПЭВМ
ПЭВМ
ИПО
Алгоритмы
ФПО
Начальные условия и программа моделирования
Обработанные результаты
моделирования
и ТМИ
ПО обработки
результатов
моделирования
и
ПЭВМ
ПЭВМ
ИПО
Алгоритмы
ФПО
Начальные условия и программа моделирования
Обработанные результаты
моделирования
и ТМИ
ПО обработки
результатов
моделирования
и

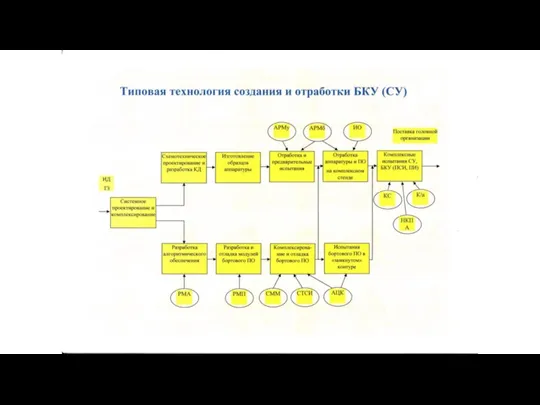
Слайд 20Типовой комплексный стенд отработки и испытаний СУ(БКУ)
Типовой комплексный стенд отработки и испытаний СУ(БКУ)



 Циклы тепловых двигателей
Циклы тепловых двигателей Александр Иванович Куприн
Александр Иванович Куприн УПРАВЛЕНИЕ R&D ПРИ ПОМОЩИ ЭКОНОМИЧЕСКОГО АНАЛИЗА ЭФФЕКТА ОТ ВНЕДРЕНИЯ
УПРАВЛЕНИЕ R&D ПРИ ПОМОЩИ ЭКОНОМИЧЕСКОГО АНАЛИЗА ЭФФЕКТА ОТ ВНЕДРЕНИЯ Информационная грамотность в начальной школе Большакова Мария Николаевна заместитель директора по информатизации гимназии № 7
Информационная грамотность в начальной школе Большакова Мария Николаевна заместитель директора по информатизации гимназии № 7 Народная одежда финнов
Народная одежда финнов Федеральный экспериментальный проект по совершенствованию питания обучающихся
Федеральный экспериментальный проект по совершенствованию питания обучающихся Эксплуатация автомобильного транспорта
Эксплуатация автомобильного транспорта Творческий проект Религиозные праздники в нашем крае
Творческий проект Религиозные праздники в нашем крае Балантидий
Балантидий Автоматизация закупок для предприятий и организаций в целях реализации Федерального закона №223-ФЗ
Автоматизация закупок для предприятий и организаций в целях реализации Федерального закона №223-ФЗ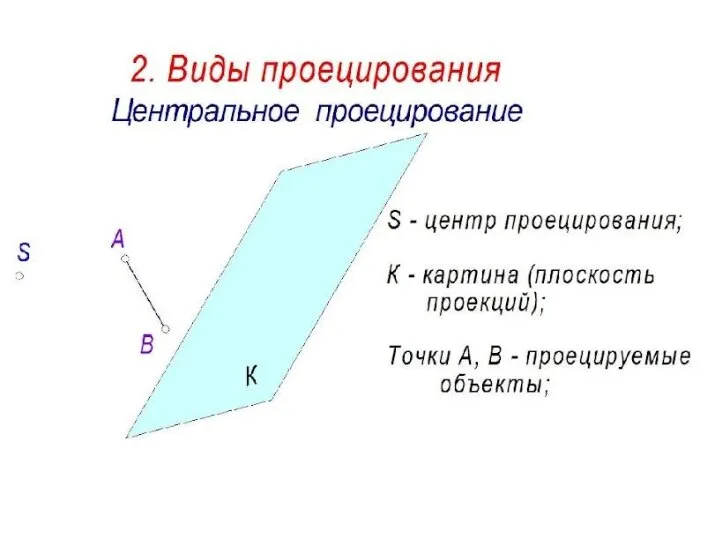 Виды проецирования. Центральное проецирование
Виды проецирования. Центральное проецирование Молодежные субкультуры
Молодежные субкультуры Презентация на тему Понятие, признаки, функции социального партнерства
Презентация на тему Понятие, признаки, функции социального партнерства  Presentation Title My name My position, contact information or project description
Presentation Title My name My position, contact information or project description  СЕКС БОЛЬШЕ, ЧЕМ ФИЗИОЛОГИЧЕСКАЯ ПОТРЕБНОСТЬ
СЕКС БОЛЬШЕ, ЧЕМ ФИЗИОЛОГИЧЕСКАЯ ПОТРЕБНОСТЬ Интерактивная игра Назови виды декоративно-прикладного искусства
Интерактивная игра Назови виды декоративно-прикладного искусства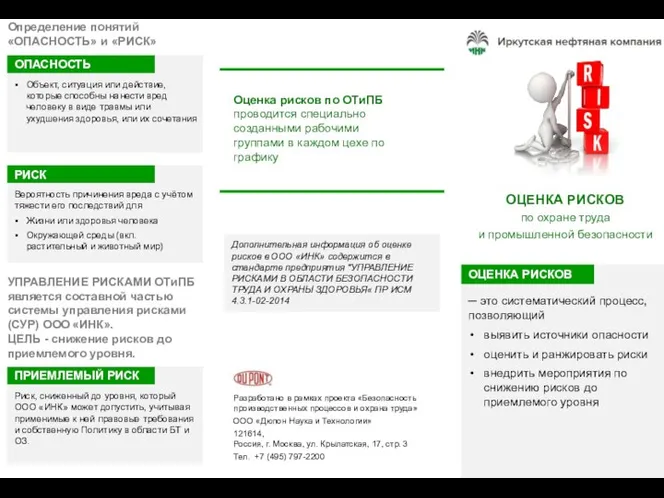 Памятка Оценка Рисков-4
Памятка Оценка Рисков-4 ДЕНЬ ЗАЩИТНИКА ОТЕЧЕСТВА.
ДЕНЬ ЗАЩИТНИКА ОТЕЧЕСТВА. ВИТАВАКС 200ФФ
ВИТАВАКС 200ФФ Их имена у всех на устах
Их имена у всех на устах Организация сопровождаемого проживания граждан с нарушениями
Организация сопровождаемого проживания граждан с нарушениями Ковалёв Юрий,
Ковалёв Юрий,  О текущем статусе реконструкции большого зала филармонии
О текущем статусе реконструкции большого зала филармонии Новые кредитные программы«ФИМ Целевой» и «ФИМ Проектный»Программы реализуются совместно с Российским Банком поддержки малог
Новые кредитные программы«ФИМ Целевой» и «ФИМ Проектный»Программы реализуются совместно с Российским Банком поддержки малог Выберите правильный ответ-
Выберите правильный ответ- Выполняем основные швы
Выполняем основные швы Бенчмаркинг как путь к повышению эффективности компании Олег ДАВИДОВИЧ, Директор по маркетингу
Бенчмаркинг как путь к повышению эффективности компании Олег ДАВИДОВИЧ, Директор по маркетингу Модель преемственности уровней дошкольного и начального общего образования в условиях ГБОУ прогимназия Радуга № 624
Модель преемственности уровней дошкольного и начального общего образования в условиях ГБОУ прогимназия Радуга № 624