- Основы изобретательской деятельности

Содержание
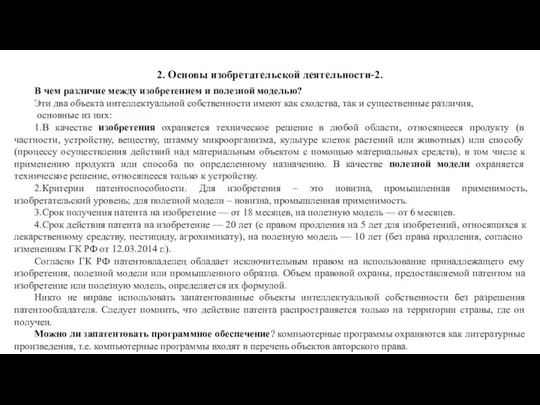
- 2. 2. Основы изобретательской деятельности-2. В чем различие между изобретением и полезной моделью? Эти два объекта интеллектуальной
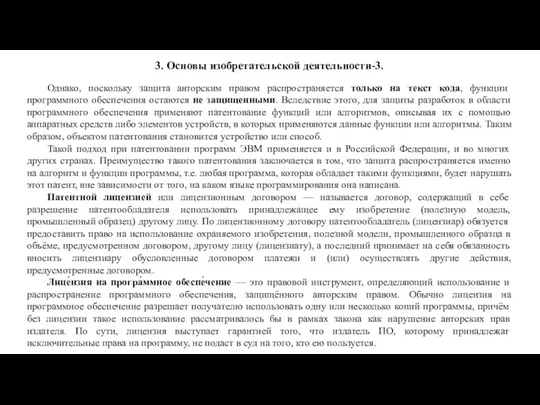
- 3. 3. Основы изобретательской деятельности-3. Однако, поскольку защита авторским правом распространяется только на текст кода, функции программного
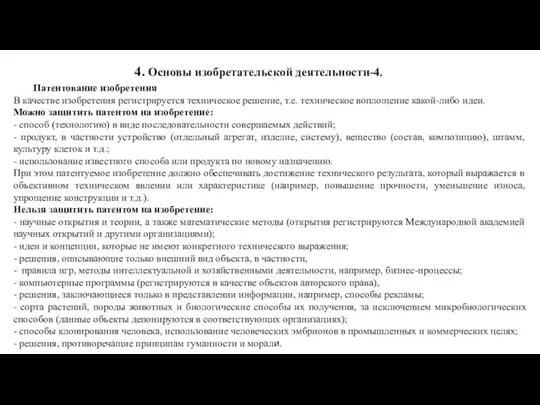
- 4. 4. Основы изобретательской деятельности-4. Патентование изобретения В качестве изобретения регистрируется техническое решение, т.е. техническое воплощение какой-либо
- 5. ИСТОРИЯ АВТОМАТИКИ 1 Автоматы 2 Первые автоматические регуляторы паровых машин. 3 Усовершенствование регуляторов скорости. 4 Автоматика
- 6. Автоматы Древнегреческое слово «автоматика» и обозначает «самодействие» Герон Александрийский (вторая половина I века н. э.) Один
- 7. Автоматы Древнего Египта Автомат для открывания дверей храма Двери 1 раздвигаются двумя воротами 2, поворот которых
- 8. Водяные часы Ктезибия Ктезибий (285-222 годы до н. э.) - один из пионеров автоматики. Вода из
- 9. Термостат Дреббеля Знаменитый голландский ученый Корнелиус Дреббель (Cornelius Jacobszoon Drebbel) изобрел в начале XVII в. инкубатор
- 10. Регулятор поворота лопастей ветряной мельницы Эдмунда Ли (1754 г.) 1 - основное рабочее ветряное колесо мельницы;
- 11. Особенности первого этапа автоматизации Первые самодействующие устройства (автоматы), появившиеся задолго до новой эры, как правило, работали
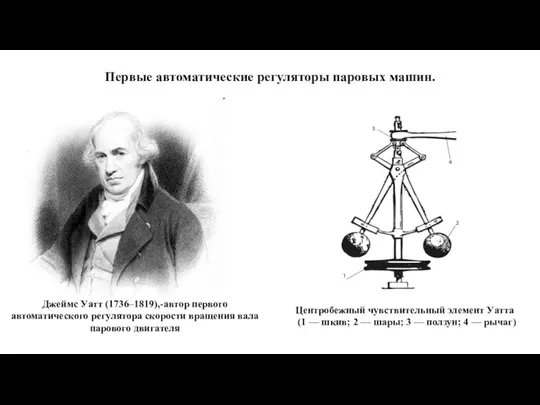
- 12. Первые автоматические регуляторы паровых машин. Джеймс Уатт (1736–1819),-автор первого автоматического регулятора скорости вращения вала парового двигателя
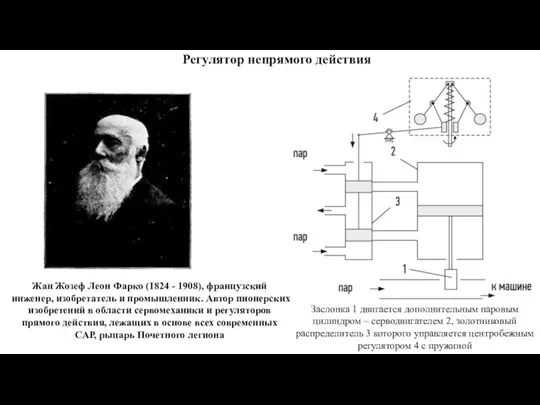
- 13. Регулятор непрямого действия Жан Жозеф Леон Фарко (1824 - 1908), французский инженер, изобретатель и промышленник. Автор
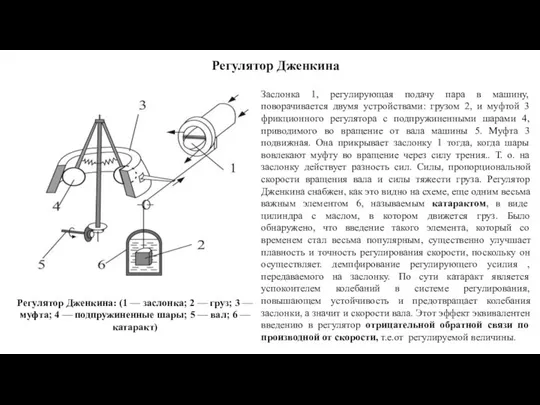
- 14. Регулятор Дженкина Регулятор Дженкина: (1 — заслонка; 2 — груз; 3 — муфта; 4 — подпружиненные
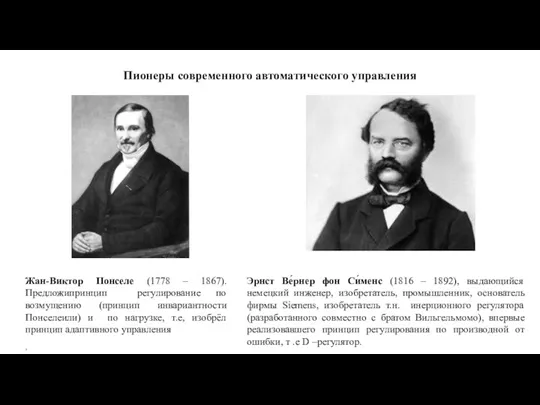
- 15. Пионеры современного автоматического управления Жан-Виктор Понселе (1778 – 1867). Предложипринцип регулирование по возмущению (принцип инвариантности Понселеили)
- 16. Новый этап развития систем автоматики Основные особенности: • Паровая машина потребовала ряда автоматических устройств, таких как
- 17. Автоматика XX века а Новый этап в развитие автоматического управления характеризуется внедрением в системы регулирования и
- 18. Освоение автоматами космического пространства и планет Солнечной системы Луноход на Луне,1970,СССР АМС «Венера-7, 1979, СССР Зонд
- 19. Этапы развития процессов автоматизации и промышленные революции. • Первая промышленная революция (конец XVIII – начало XIX
- 20. Этапы развития процессов автоматизации Второй этап (1980 г.) – активизация работ по созданию и внедрению систем
- 21. Эвм в автоматизированных системах Один из наиболее распространённых в СССР управляющий вычислительный комплекс СМ-2М, 80 –годы
- 22. Этапы развития процессов автоматизации Четвёртый этап – связывается с четвертой промышленной революцией (термин введен в 2011
- 23. «Индустрия 4.0» Термин «Индустрия 4.0» стали использовать как синоним четвертой промышленной революции. Суть ее в том,
- 24. Интернет вещей: история появления, сущность. Интернет вещей (англ. internet of things, IoT) — концепция вычислительной сети
- 26. Скачать презентацию
Слайд 22. Основы изобретательской деятельности-2.
В чем различие между изобретением и полезной моделью?
Эти
2. Основы изобретательской деятельности-2.
В чем различие между изобретением и полезной моделью?
Эти
Слайд 33. Основы изобретательской деятельности-3.
Однако, поскольку защита авторским правом распространяется только на
3. Основы изобретательской деятельности-3.
Однако, поскольку защита авторским правом распространяется только на
Слайд 44. Основы изобретательской деятельности-4.
Патентование изобретения
В качестве изобретения регистрируется техническое решение, т.е.
4. Основы изобретательской деятельности-4.
Патентование изобретения
В качестве изобретения регистрируется техническое решение, т.е.
Слайд 5ИСТОРИЯ АВТОМАТИКИ
1 Автоматы
2 Первые автоматические регуляторы паровых машин.
3 Усовершенствование регуляторов скорости.
4
1 Автоматы
2 Первые автоматические регуляторы паровых машин.
3 Усовершенствование регуляторов скорости.
4
Слайд 6
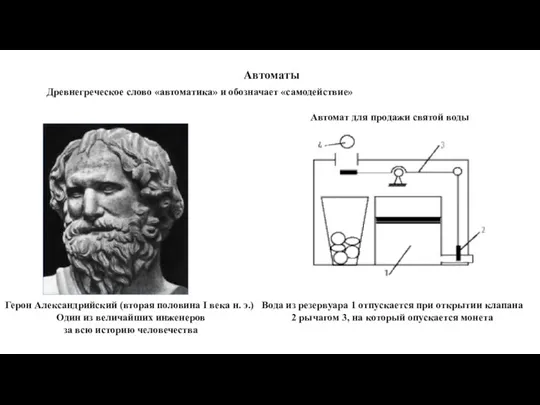
Автоматы
Древнегреческое слово «автоматика» и обозначает «самодействие»
Герон Александрийский (вторая половина I века
Автоматы
Древнегреческое слово «автоматика» и обозначает «самодействие»
Герон Александрийский (вторая половина I века
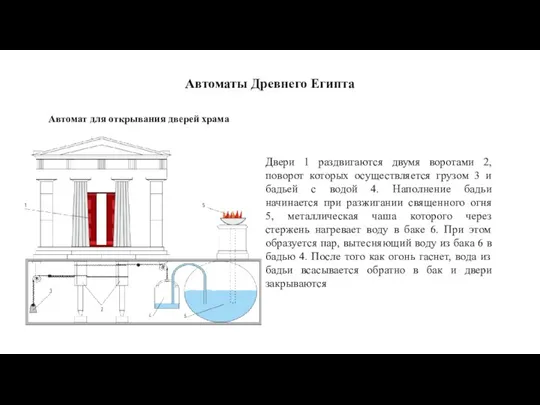
Слайд 7Автоматы Древнего Египта
Автомат для открывания дверей храма
Двери 1 раздвигаются двумя воротами 2,
Автоматы Древнего Египта
Автомат для открывания дверей храма
Двери 1 раздвигаются двумя воротами 2,
Слайд 8Водяные часы Ктезибия
Ктезибий (285-222 годы до н. э.) -
один из пионеров
Водяные часы Ктезибия
Ктезибий (285-222 годы до н. э.) -
один из пионеров

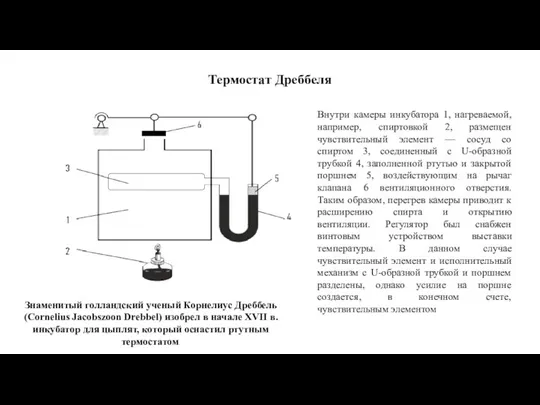
Слайд 9Термостат Дреббеля
Знаменитый голландский ученый Корнелиус Дреббель (Cornelius Jacobszoon Drebbel) изобрел в начале
Термостат Дреббеля
Знаменитый голландский ученый Корнелиус Дреббель (Cornelius Jacobszoon Drebbel) изобрел в начале
Слайд 10Регулятор поворота лопастей ветряной мельницы Эдмунда Ли (1754 г.)
1 - основное рабочее
Регулятор поворота лопастей ветряной мельницы Эдмунда Ли (1754 г.)
1 - основное рабочее

Слайд 11Особенности первого этапа автоматизации
Первые самодействующие устройства (автоматы), появившиеся задолго до новой эры,
Особенности первого этапа автоматизации
Первые самодействующие устройства (автоматы), появившиеся задолго до новой эры,
Слайд 12Первые автоматические регуляторы паровых машин.
Джеймс Уатт (1736–1819),-автор первого автоматического регулятора скорости вращения
Первые автоматические регуляторы паровых машин.
Джеймс Уатт (1736–1819),-автор первого автоматического регулятора скорости вращения
Слайд 13Регулятор непрямого действия
Жан Жозеф Леон Фарко (1824 - 1908), французский инженер,
Регулятор непрямого действия
Жан Жозеф Леон Фарко (1824 - 1908), французский инженер,
Слайд 14Регулятор Дженкина
Регулятор Дженкина: (1 — заслонка; 2 — груз; 3 — муфта;
Регулятор Дженкина
Регулятор Дженкина: (1 — заслонка; 2 — груз; 3 — муфта;
Слайд 15Пионеры современного автоматического управления
Жан-Виктор Понселе (1778 – 1867). Предложипринцип регулирование по возмущению
Пионеры современного автоматического управления
Жан-Виктор Понселе (1778 – 1867). Предложипринцип регулирование по возмущению
Слайд 16Новый этап развития систем автоматики
Основные особенности:
• Паровая машина потребовала ряда автоматических устройств, таких
Новый этап развития систем автоматики
Основные особенности:
• Паровая машина потребовала ряда автоматических устройств, таких
Слайд 17
Автоматика XX века
а
Новый этап в развитие автоматического управления характеризуется внедрением в системы
Автоматика XX века
а
Новый этап в развитие автоматического управления характеризуется внедрением в системы
Слайд 18Освоение автоматами космического пространства и планет Солнечной системы
Луноход на Луне,1970,СССР
АМС «Венера-7,
Освоение автоматами космического пространства и планет Солнечной системы
Луноход на Луне,1970,СССР
АМС «Венера-7,

Слайд 19
Этапы развития процессов автоматизации и промышленные революции.
• Первая промышленная революция (конец XVIII –
Этапы развития процессов автоматизации и промышленные революции.
• Первая промышленная революция (конец XVIII –
Слайд 20Этапы развития процессов автоматизации
Второй этап (1980 г.) – активизация работ по
Этапы развития процессов автоматизации
Второй этап (1980 г.) – активизация работ по
Слайд 21Эвм в автоматизированных системах
Один из наиболее распространённых
в СССР управляющий вычислительный
Эвм в автоматизированных системах
Один из наиболее распространённых
в СССР управляющий вычислительный

Слайд 22Этапы развития процессов автоматизации
Четвёртый этап – связывается с четвертой промышленной революцией
Этапы развития процессов автоматизации
Четвёртый этап – связывается с четвертой промышленной революцией
Слайд 23«Индустрия 4.0»
Термин «Индустрия 4.0» стали использовать как синоним четвертой промышленной революции.
«Индустрия 4.0»
Термин «Индустрия 4.0» стали использовать как синоним четвертой промышленной революции.
Слайд 24
Интернет вещей: история появления, сущность.
Интернет вещей (англ. internet of things, IoT) —
Интернет вещей: история появления, сущность.
Интернет вещей (англ. internet of things, IoT) —
 Краеведческий музей п. Колышлей
Краеведческий музей п. Колышлей Устройство Римской Республики
Устройство Римской Республики Политика опричнины и смута
Политика опричнины и смута Династия Романовых
Династия Романовых История создания Петрозаводска
История создания Петрозаводска Книга Памяти
Книга Памяти murzina_m.n.ekaterina_ii
murzina_m.n.ekaterina_ii St Aidan Oswald
St Aidan Oswald Презентация на тему Быт крестьян XVI-XVII века
Презентация на тему Быт крестьян XVI-XVII века  Добрый след Василия Пескова
Добрый след Василия Пескова Русская культура 13 – 14 вв
Русская культура 13 – 14 вв Праздник победы
Праздник победы Презентация на тему Сперанский
Презентация на тему Сперанский  Научные открытия и изобретения
Научные открытия и изобретения Журналистика экстремальных ситуаций. Этапы развития
Журналистика экстремальных ситуаций. Этапы развития История развития отрасли хозяйства Калининграда
История развития отрасли хозяйства Калининграда Великая отечественная война
Великая отечественная война Стоунхендж /Stonehenge
Стоунхендж /Stonehenge Образ готического собора в средневековом городе
Образ готического собора в средневековом городе Лекция 3. Раздробленность русских земель
Лекция 3. Раздробленность русских земель Микены и Троя
Микены и Троя Искусство Древнего Рима. Этруски. Период Римской республики. (Часть 1)
Искусство Древнего Рима. Этруски. Период Римской республики. (Часть 1) Выдающиеся женщины прошлого и настоящего
Выдающиеся женщины прошлого и настоящего Национально-освободительная война под руководством Б.Хмельницкого
Национально-освободительная война под руководством Б.Хмельницкого Наш краеведческий музей, г. Новороссийск МБОУ СОШ №32
Наш краеведческий музей, г. Новороссийск МБОУ СОШ №32 Путешествие в Древнюю Грецию
Путешествие в Древнюю Грецию Съезд князей в Любече 1097
Съезд князей в Любече 1097 24 мая-День славянской письменности
24 мая-День славянской письменности