- «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В.

Содержание
- 2. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Структура. Структура отражает наиболее существенные взаимоотношения между элементами
- 3. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. В зависимости от характера расположения подсистем различают составной
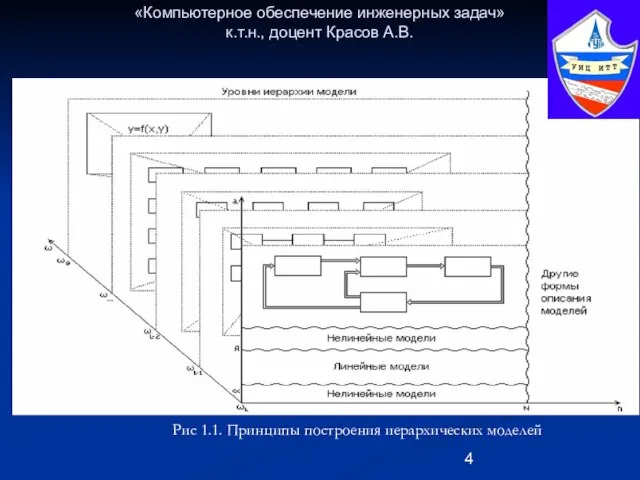
- 4. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Рис 1.1. Принципы построения иерархических моделей
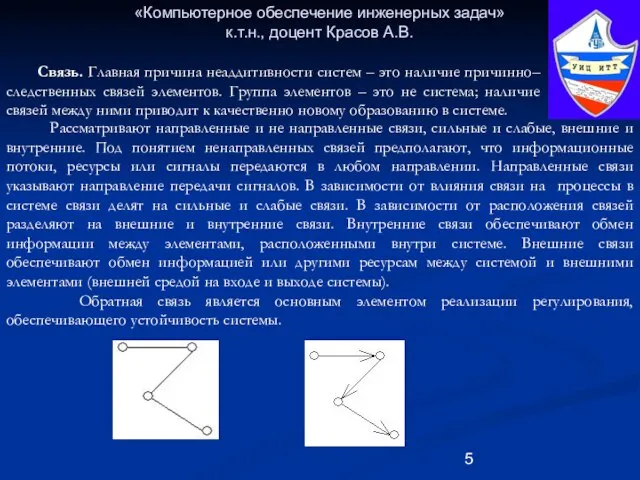
- 5. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Рассматривают направленные и не направленные связи, сильные и
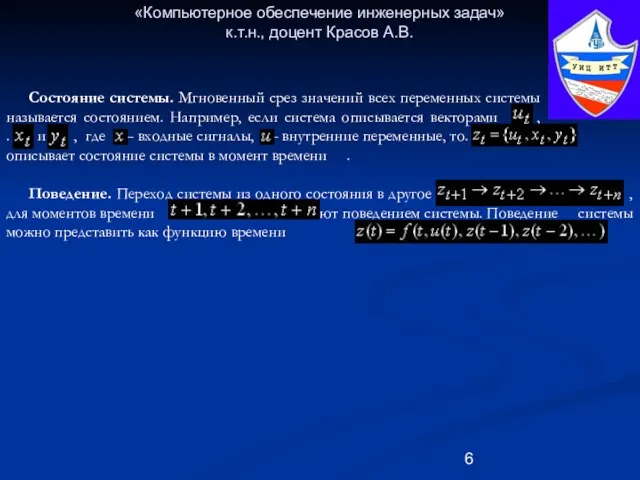
- 6. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Состояние системы. Мгновенный срез значений всех переменных системы
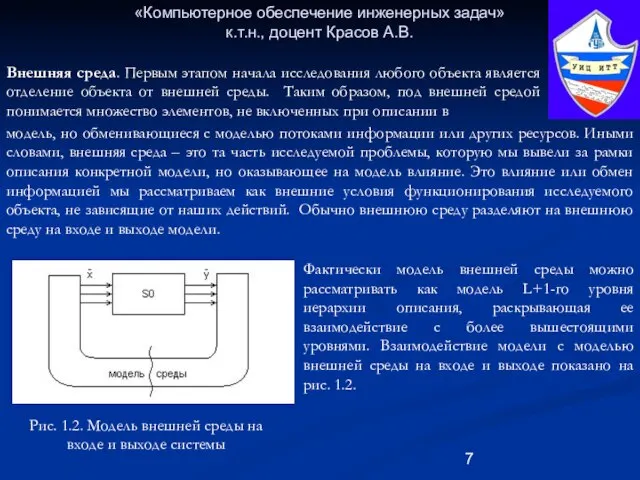
- 7. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. модель, но обменивающиеся с моделью потоками информации или
- 8. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Модель. Понятие модели трактуется неоднозначно. В основе его
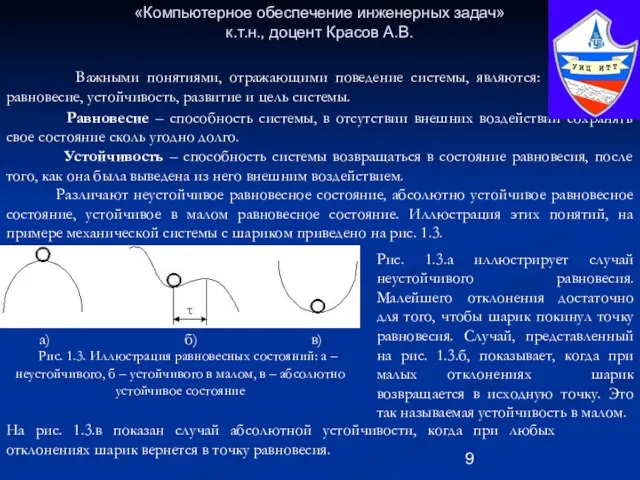
- 9. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Важными понятиями, отражающими поведение системы, являются: равновесие, устойчивость,
- 10. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Основные уровни описания модели На практике используют различные
- 11. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. отношений (элементов связи), Z=Z1,...., Zk - множество законов
- 12. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Модель является средством для описания, понимания и предсказания
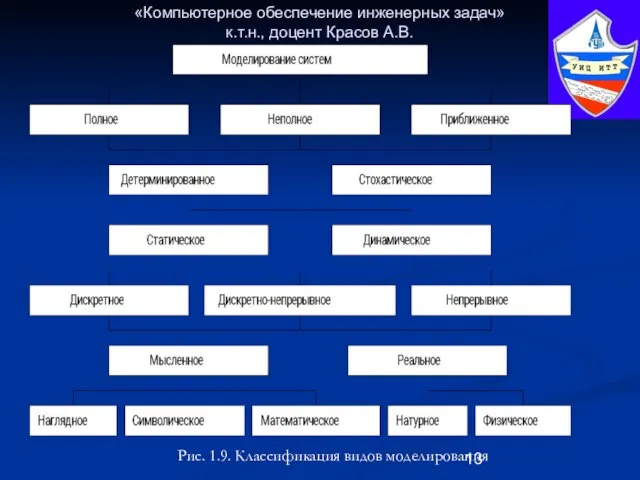
- 13. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Рис. 1.9. Классификация видов моделирования
- 14. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Обычно различают следующие модели [76]. Фундаментальные (детальные) модели,
- 15. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. 1. Консервативность, которое представляет собой способность алгоритма удовлетворять
- 16. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Таким образом, выделяют следующие признаки классов систем с
- 17. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Более сложные классы операторов получаются при введении одного
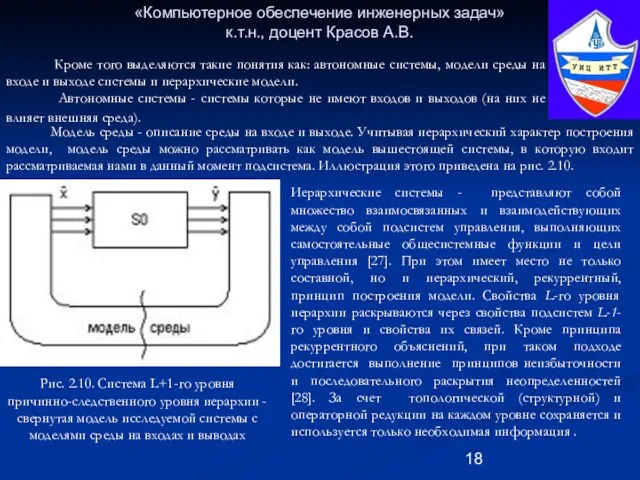
- 18. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Кроме того выделяются такие понятия как: автономные системы,
- 19. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Ранги неопределенностей Широко используемым понятием при описании моделей
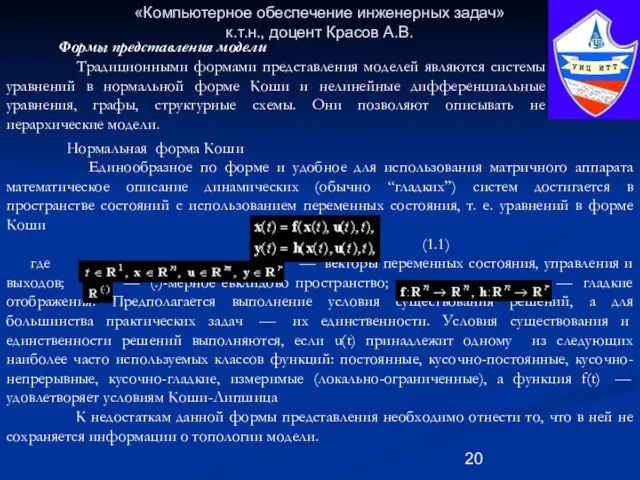
- 20. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Формы представления модели Традиционными формами представления моделей являются
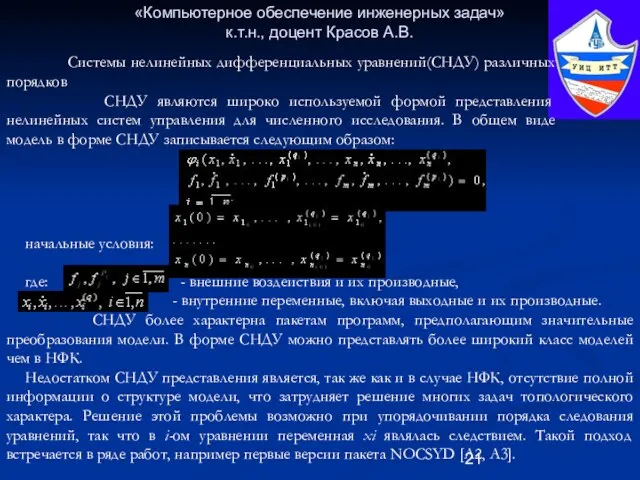
- 21. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Системы нелинейных дифференциальных уравнений(СНДУ) различных порядков СНДУ являются
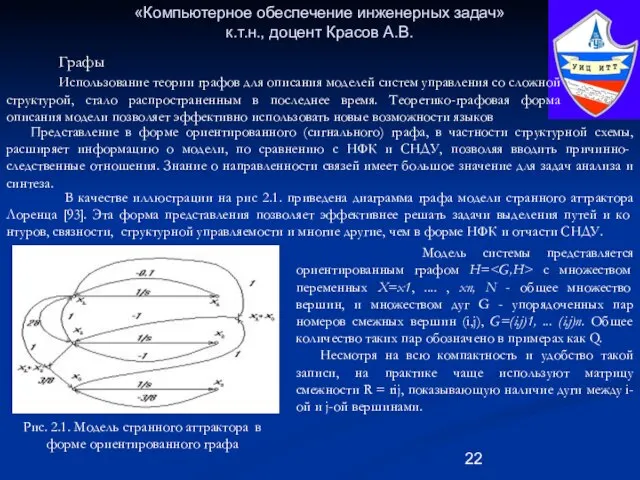
- 22. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Графы Использование теории графов для описания моделей систем
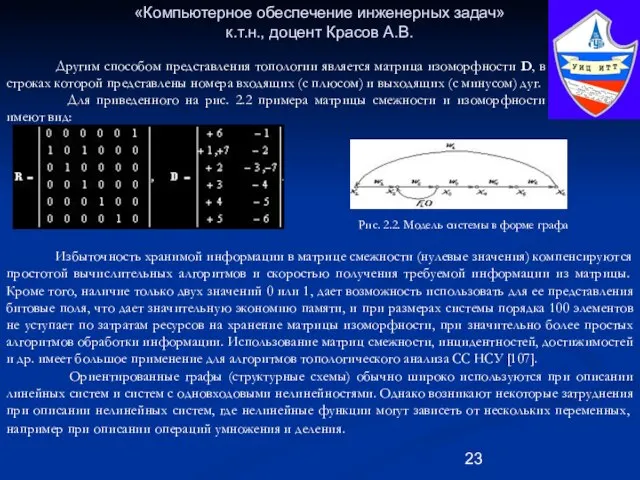
- 23. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Другим способом представления топологии является матрица изоморфности D,
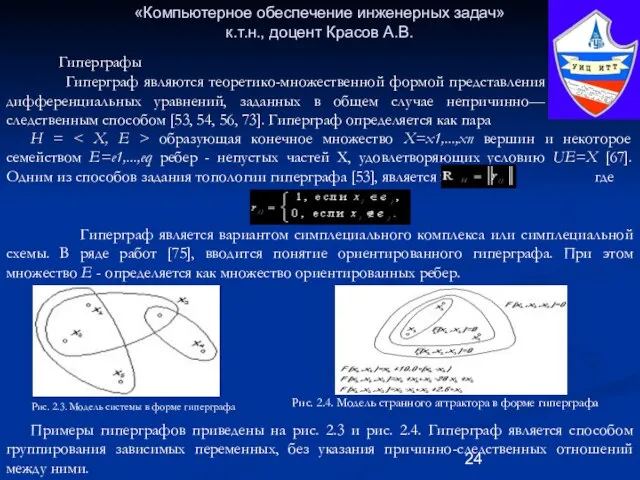
- 24. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Гиперграфы Гиперграф являются теоретико-множественной формой представления дифференциальных уравнений,
- 25. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Нелинейные гибридные графы Нелинейные гибридные графы, являются расширением
- 26. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Множество X можно рассматривать как модель нулевого ранга
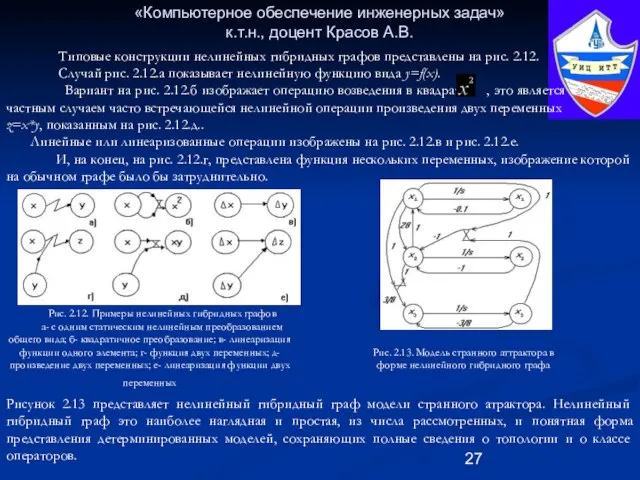
- 27. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Рис. 2.12. Примеры нелинейных гибридных графов а- с
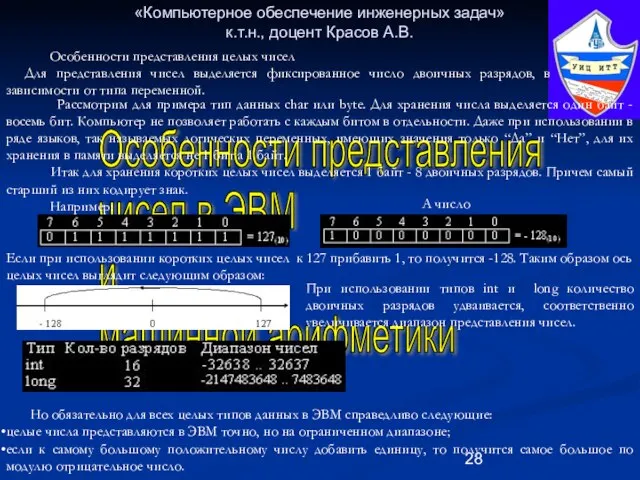
- 28. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Особенности представления чисел в ЭВМ и машинной арифметики
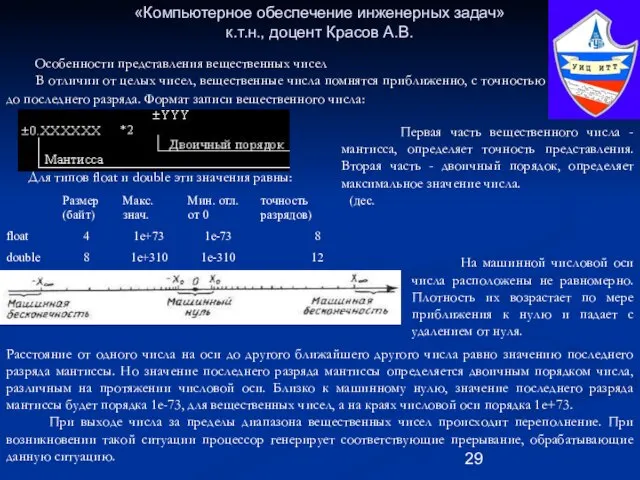
- 29. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Особенности представления вещественных чисел В отличии от целых
- 30. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. По этому: 3 / 2 = 1, а
- 31. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. В связи с выше изложенным, очень важную, дополнительную
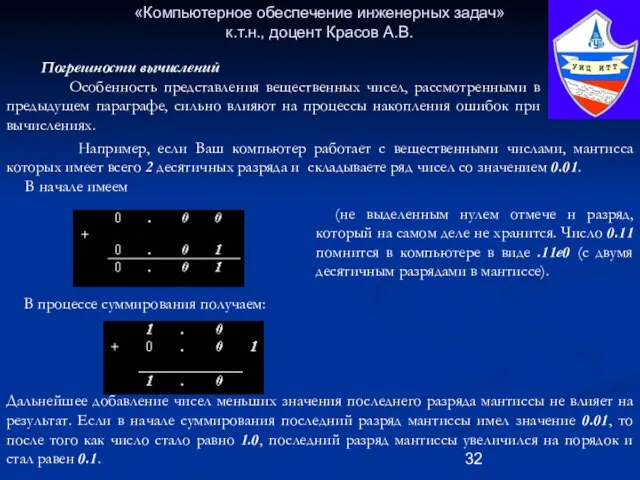
- 32. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Погрешности вычислений Особенность представления вещественных чисел, рассмотренными в
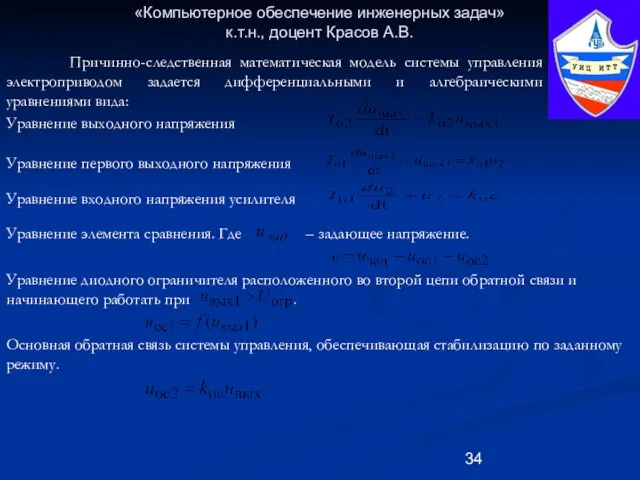
- 33. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Пример выполнения лабораторной работы Система управления имеет два
- 34. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Причинно-следственная математическая модель системы управления электроприводом задается дифференциальными
- 35. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. 2.2. Составление структурной схемы модели На основании уравнений,
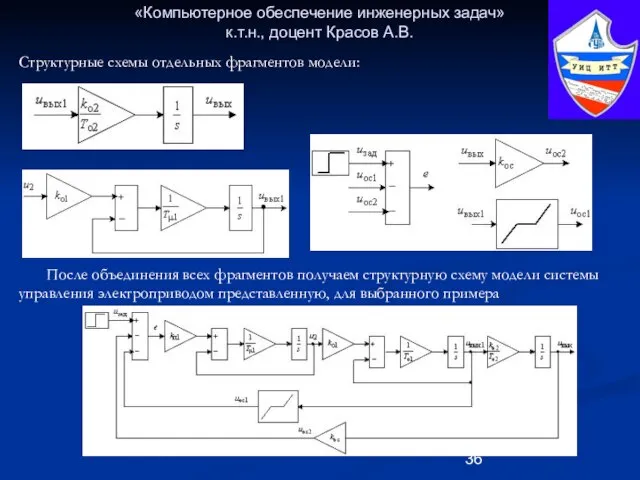
- 36. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. После объединения всех фрагментов получаем структурную схему модели
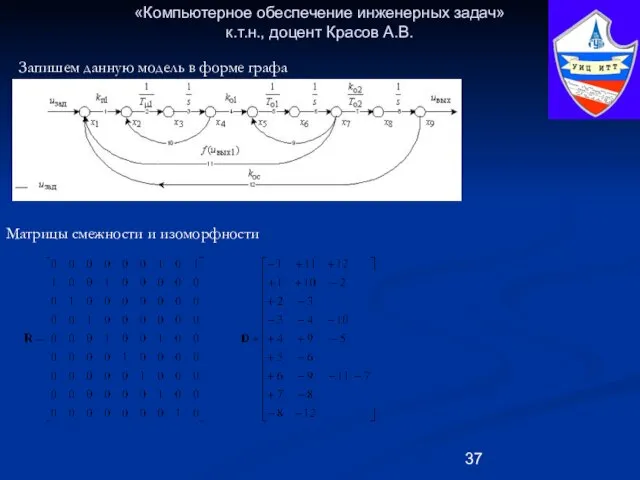
- 37. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Запишем данную модель в форме графа Матрицы смежности
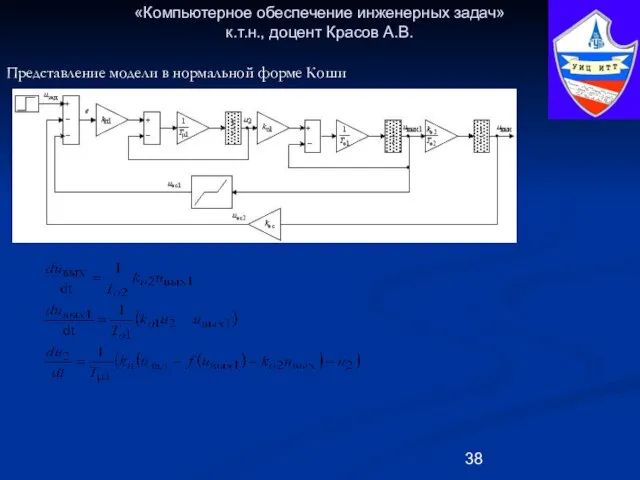
- 38. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Представление модели в нормальной форме Коши
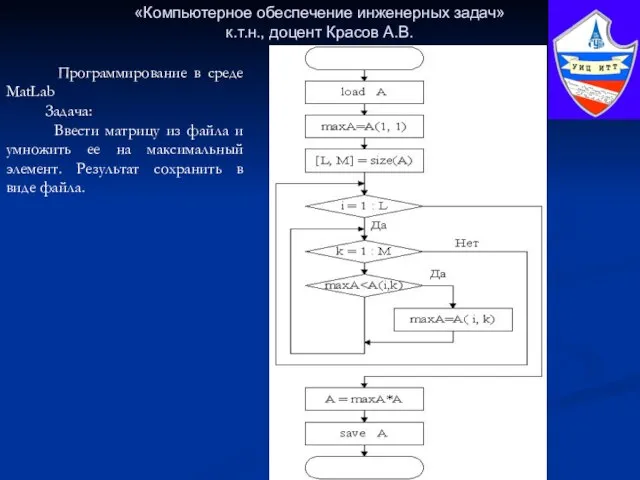
- 39. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Программирование в среде MatLab Задача: Ввести матрицу из
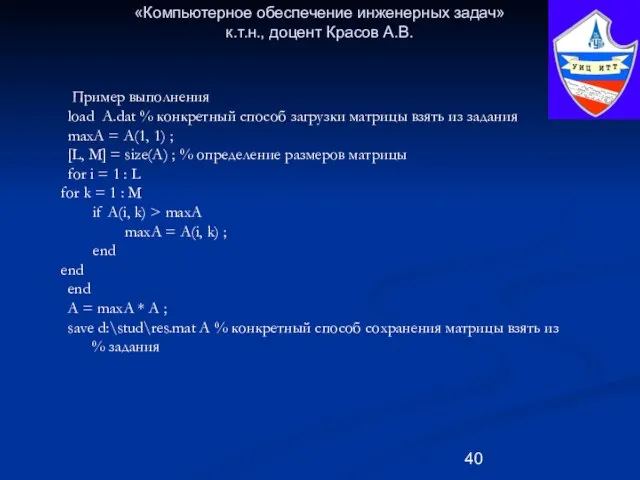
- 40. «Компьютерное обеспечение инженерных задач» к.т.н., доцент Красов А.В. Пример выполнения load A.dat % конкретный способ загрузки
- 42. Скачать презентацию
Слайд 2«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Структура. Структура отражает наиболее
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Структура. Структура отражает наиболее
Слайд 3«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
В зависимости от характера расположения
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
В зависимости от характера расположения
Слайд 4«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Рис 1.1. Принципы построения иерархических
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Рис 1.1. Принципы построения иерархических
Слайд 5«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Рассматривают направленные и не
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Рассматривают направленные и не
Слайд 6«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Состояние системы. Мгновенный срез
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Состояние системы. Мгновенный срез
Слайд 7«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
модель, но обменивающиеся с моделью
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
модель, но обменивающиеся с моделью
Слайд 8«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Модель. Понятие модели трактуется
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Модель. Понятие модели трактуется
Слайд 9«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Важными понятиями, отражающими поведение
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Важными понятиями, отражающими поведение
Слайд 10«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Основные уровни описания модели
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Основные уровни описания модели
Слайд 11«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
отношений (элементов связи), Z=Z1,...., Zk -
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
отношений (элементов связи), Z=Z1,...., Zk -
Слайд 12«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Модель является средством для
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Модель является средством для
Слайд 13«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Рис. 1.9. Классификация видов моделирования
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Рис. 1.9. Классификация видов моделирования
Слайд 14«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Обычно различают следующие модели [76].
Фундаментальные
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Обычно различают следующие модели [76].
Фундаментальные
Слайд 15«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
1. Консервативность, которое представляет собой
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
1. Консервативность, которое представляет собой
Слайд 16«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Таким образом, выделяют следующие признаки
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Таким образом, выделяют следующие признаки
Слайд 17«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Более сложные классы операторов получаются
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Более сложные классы операторов получаются
Слайд 18«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Кроме того выделяются такие
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Кроме того выделяются такие
Слайд 19«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Ранги неопределенностей
Широко
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Ранги неопределенностей
Широко
Слайд 20«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Формы представления модели
Традиционными
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Формы представления модели
Традиционными
Слайд 21«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Системы нелинейных дифференциальных уравнений(СНДУ)
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Системы нелинейных дифференциальных уравнений(СНДУ)
Слайд 22«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Графы
Использование теории графов
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Графы
Использование теории графов
Слайд 23«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Другим способом представления топологии
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Другим способом представления топологии
Слайд 24«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Гиперграфы
Гиперграф являются
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Гиперграфы
Гиперграф являются
Слайд 25«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Нелинейные гибридные графы
Нелинейные
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Нелинейные гибридные графы
Нелинейные
Слайд 26«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Множество X можно рассматривать
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Множество X можно рассматривать
Слайд 27«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Рис. 2.12. Примеры нелинейных гибридных
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Рис. 2.12. Примеры нелинейных гибридных
Слайд 28«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Особенности представления
чисел в ЭВМ
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Особенности представления чисел в ЭВМ
Слайд 29«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Особенности представления вещественных чисел
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Особенности представления вещественных чисел
Слайд 30«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
По этому:
3 / 2
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
По этому:
3 / 2
Слайд 31«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
В связи с выше
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
В связи с выше
Слайд 32«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Погрешности вычислений
Особенность
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Погрешности вычислений
Особенность
Слайд 33«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Пример
выполнения лабораторной работы
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Пример
выполнения лабораторной работы
Слайд 34«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Причинно-следственная математическая модель системы
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Причинно-следственная математическая модель системы
Слайд 35«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
2.2. Составление структурной схемы модели
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
2.2. Составление структурной схемы модели
Слайд 36«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
После объединения всех фрагментов
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
После объединения всех фрагментов
Слайд 37«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Запишем данную модель в форме
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Запишем данную модель в форме
Слайд 38«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Представление модели в нормальной форме
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Представление модели в нормальной форме
Слайд 39«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Программирование в среде MatLab
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Программирование в среде MatLab
Слайд 40«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Пример выполнения
load A.dat
«Компьютерное обеспечение инженерных задач»
к.т.н., доцент Красов А.В.
Пример выполнения
load A.dat
 О подготовке общеобразовательных учреждений к началу 2012–2013 учебного года
О подготовке общеобразовательных учреждений к началу 2012–2013 учебного года Молодёжные субкультуры
Молодёжные субкультуры Презентация на тему Непосредственная образовательная деятельность в ДОУ
Презентация на тему Непосредственная образовательная деятельность в ДОУ Буквы К, к, обозначающие согласные звуки [к], [к`]
Буквы К, к, обозначающие согласные звуки [к], [к`] Построение разреза по зданию
Построение разреза по зданию Презентация на тему БАСНЯ КАК ЭПИЧЕСКИЙ ЖАНР
Презентация на тему БАСНЯ КАК ЭПИЧЕСКИЙ ЖАНР перевод чисел в двоичную систему счисления
перевод чисел в двоичную систему счисления Презентация на тему Виды движения Земли
Презентация на тему Виды движения Земли Juno and Avos
Juno and Avos Презентация на тему Гигиена кожи рук. Болезни грязных рук
Презентация на тему Гигиена кожи рук. Болезни грязных рук Презентация интерактивного мультимедийного пособия «Визуальная энциклопедия»
Презентация интерактивного мультимедийного пособия «Визуальная энциклопедия» Необыкновенные уголки Земли. Фото
Необыкновенные уголки Земли. Фото От кареты до ракеты
От кареты до ракеты Инвестиционная политика на транспорте
Инвестиционная политика на транспорте Таять может, Да не лед. Не фонарь, А свет дает.
Таять может, Да не лед. Не фонарь, А свет дает. История денежных знаков России
История денежных знаков России Выращивание авокадо в домашних условиях
Выращивание авокадо в домашних условиях Потенциальные возможности размножения организмов
Потенциальные возможности размножения организмов Основные показатели надежности систем внутридомового электроснабжения. Тема 1
Основные показатели надежности систем внутридомового электроснабжения. Тема 1 Описание и технически параметри на компютърна система
Описание и технически параметри на компютърна система Правила безопасности в кабинете информатики
Правила безопасности в кабинете информатики Брендинг бара Bells
Брендинг бара Bells Криптовалюта. Биткойн
Криптовалюта. Биткойн Культура Древней Руси 9 века
Культура Древней Руси 9 века Марко Жераси (Marco Geraci) Эксперт Совета по пенсионной реформе при Правительстве Франции
Марко Жераси (Marco Geraci) Эксперт Совета по пенсионной реформе при Правительстве Франции Происхождение и развитие человека
Происхождение и развитие человека Школа позиционирования. Стратегический менеджмент
Школа позиционирования. Стратегический менеджмент 1299268
1299268