- Биологически инспирированное техническое зрение в системах автономного искусственного интеллекта

Содержание
- 2. План Неизбежность появления адаптивных машин Метод Автономного Адаптивного Управления (ААУ) Зрение в биологических и бионических системах
- 3. 1. Неизбежность появления адаптивных машин Создавая техногенную среду, мы повторяем – переоткрываем и воспроизводим многие «изобретения»
- 4. Основные вклады науки в технологию Количество (до XIX века) Качество (XIX век) Оптимальность (ХХ век) Что
- 5. Адаптивность в природе В природе мы видим, что все объекты адаптивны, благодаря чему умеют решать самые
- 6. Адаптивность в техносфере В техносфере мы видим полное отсутствие адаптивных (самоприспосабливающихся) объектов Наши машины рождаются сразу
- 7. Сегодня адаптивных машин практически нет Видел ли кто-нибудь, как обучаются роботы? Никто не видел, так как
- 8. Что такое «адаптивность» Определение Адаптивностью будем называть способность системы управления автономного объекта добывать знания о свойствах
- 9. Причины отсутствия адаптивных машин сегодня Научные причины Технологические причины Психологические причины
- 10. Научные причины отсутствия адаптивных машин В технике сегодня господствуют детерминированные системы управления, основанные на априорной информации
- 11. Детерминированные системы управления –реактивные, не способные к самообучению. К биологии отношения почти не имеют
- 12. Основные отличия от мозга: 1. Биологический «заказчик» и объект управления (тело) в Природе – это не
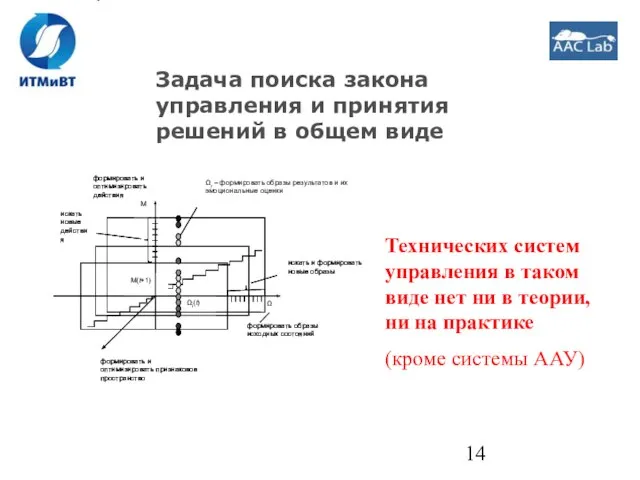
- 13. Задача поиска закона управления и принятия решений в общем виде Все элементы «закона управления» должны быть
- 14. Задача поиска закона управления и принятия решений в общем виде Технических систем управления в таком виде
- 15. Мозг, как объект изучения, морфологически очень сложен (1011 нейронов, 1014 межнейронных связей). Без понимания принципов работы
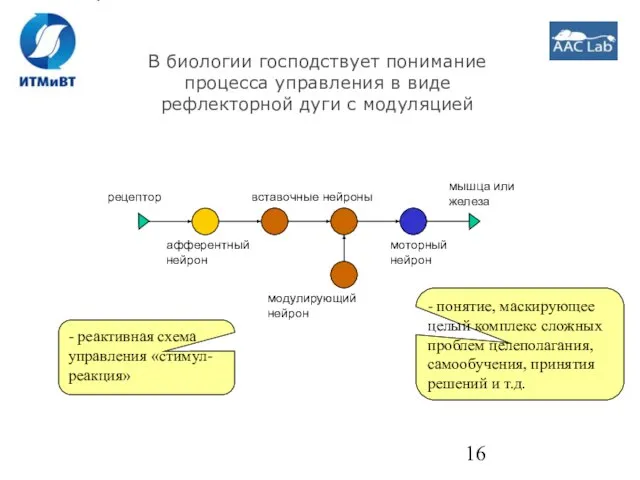
- 16. В биологии господствует понимание процесса управления в виде рефлекторной дуги с модуляцией - понятие, маскирующее целый
- 17. Некоторые понятия ФС сегодня могут быть уточнены и конкретизированы Функциональная система П.К. Анохина (1930-х гг.) Понятие
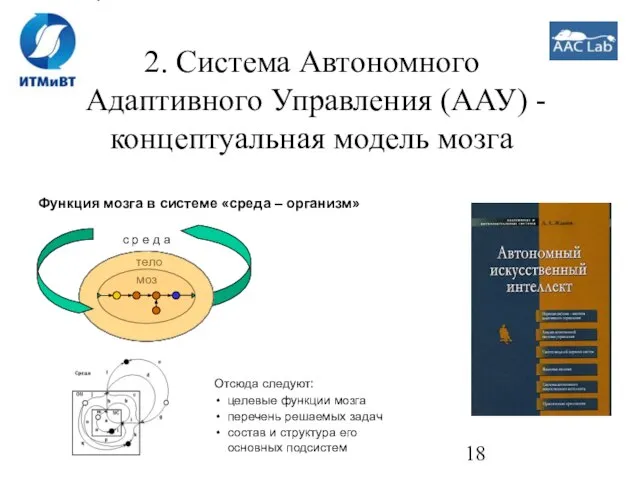
- 18. Функция мозга в системе «среда – организм» Отсюда следуют: целевые функции мозга перечень решаемых задач состав
- 19. Жданов А.А. Автономный искусственный интеллект. Монография. М.: БИНОМ. Лаборатория знаний, 2008. Изд-е 2-е: 2009.
- 20. Состав подсистем мозга и их структура Выделены и смоделированы: необходимые функциональные подсистемы мозга необходимые виды памяти
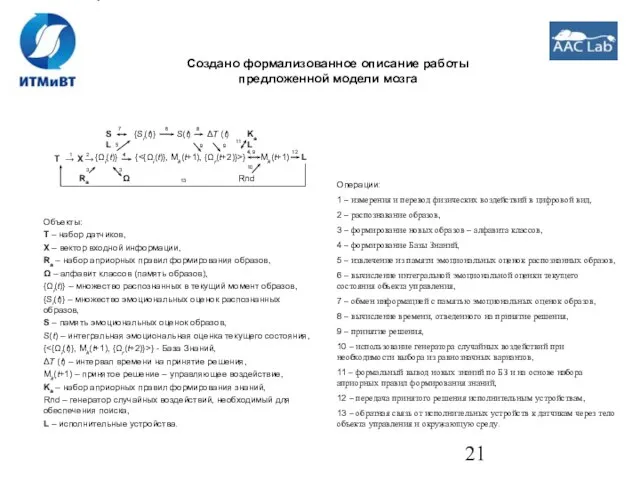
- 21. Объекты: T – набор датчиков, X – вектор входной информации, Ra – набор априорных правил формирования
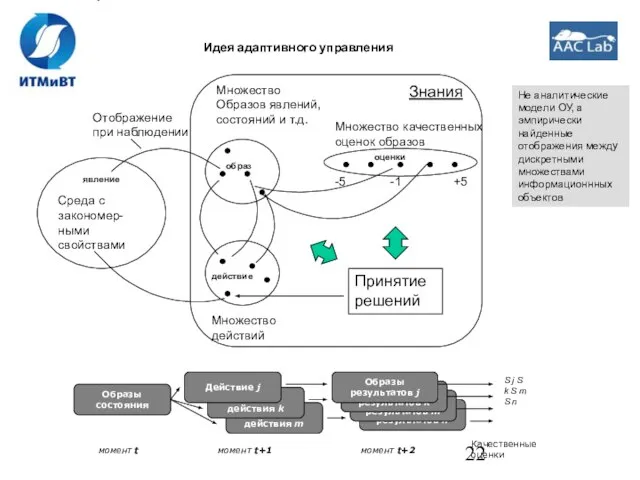
- 22. Идея адаптивного управления Не аналитические модели ОУ, а эмпирически найденные отображения между дискретными множествами информационнных объектов
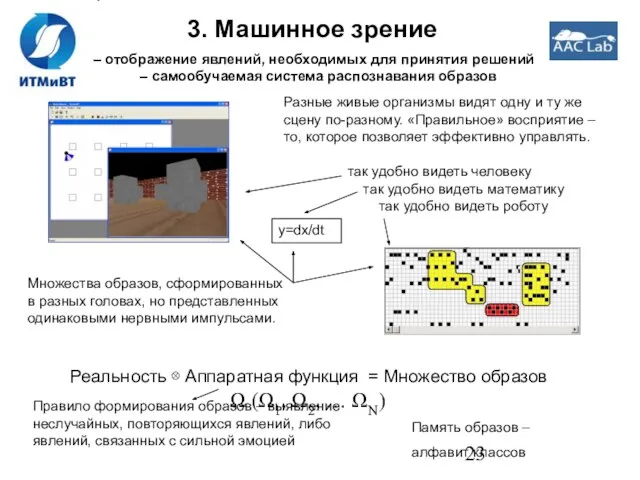
- 23. 3. Машинное зрение – отображение явлений, необходимых для принятия решений – самообучаемая система распознавания образов Память
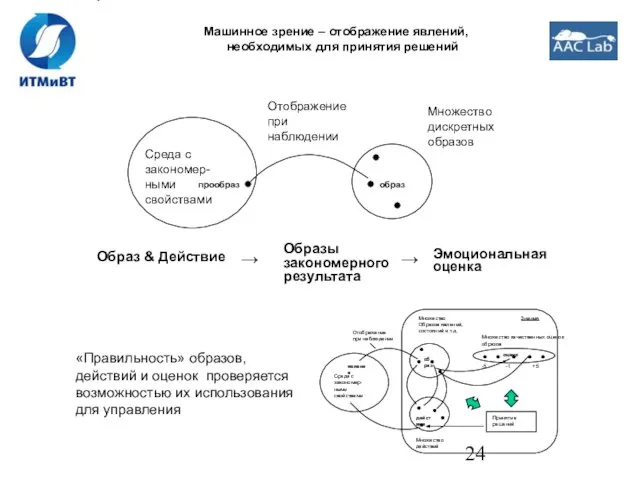
- 24. Машинное зрение – отображение явлений, необходимых для принятия решений «Правильность» образов, действий и оценок проверяется возможностью
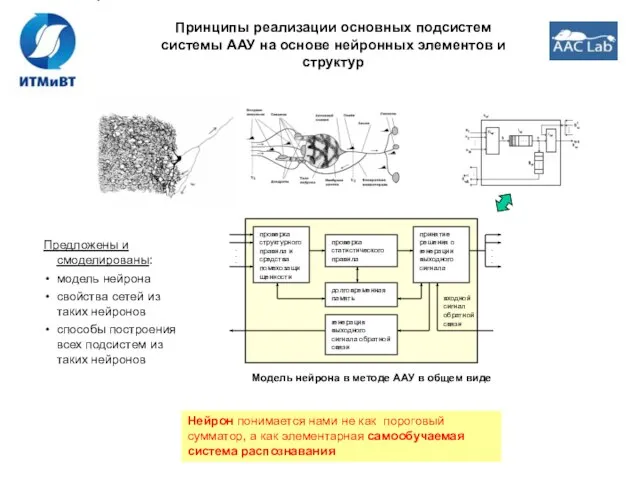
- 25. Принципы реализации основных подсистем системы ААУ на основе нейронных элементов и структур Предложены и смоделированы: модель
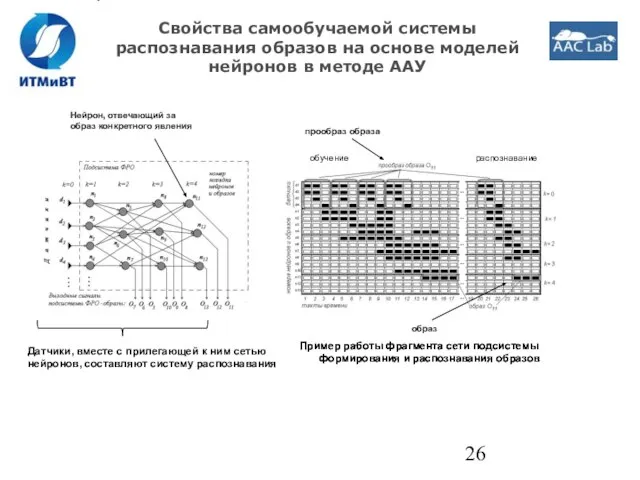
- 26. Свойства самообучаемой системы распознавания образов на основе моделей нейронов в методе ААУ Пример работы фрагмента сети
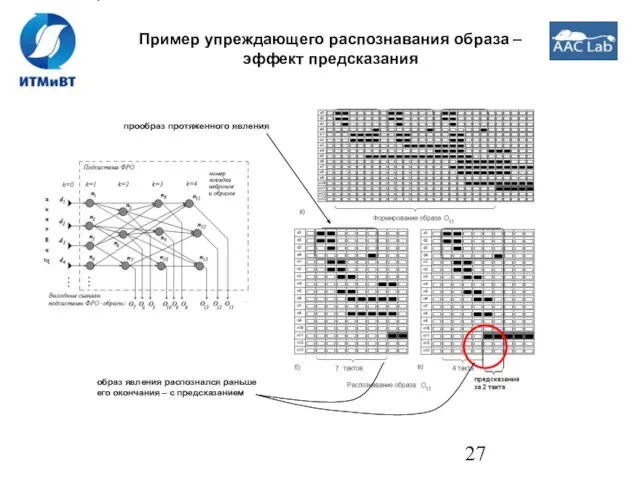
- 27. Пример упреждающего распознавания образа – эффект предсказания
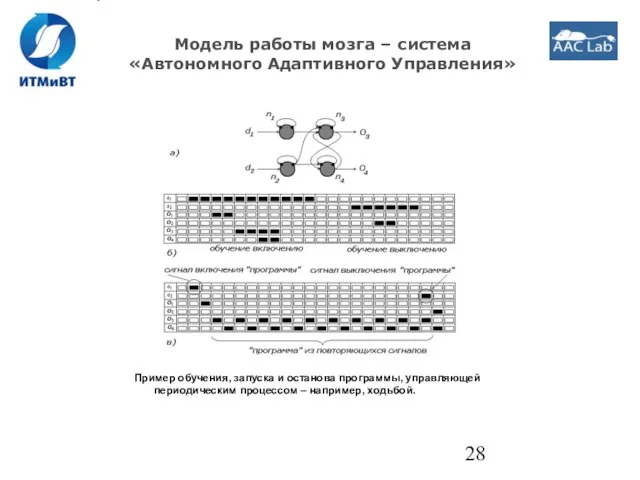
- 28. Модель работы мозга – система «Автономного Адаптивного Управления» Пример обучения, запуска и останова программы, управляющей периодическим
- 29. Самообучаемая распознающая нейроноподобная система мобильного робота Гном №9 состоит из 3-х слоев нейронов ААУ и моделирует
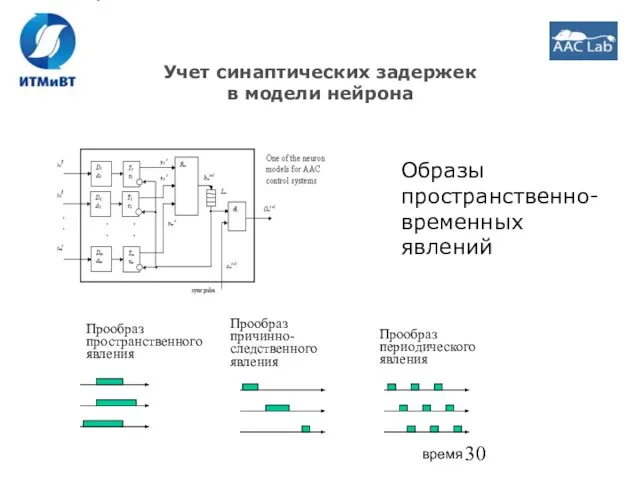
- 30. Учет синаптических задержек в модели нейрона Образы пространственно-временных явлений
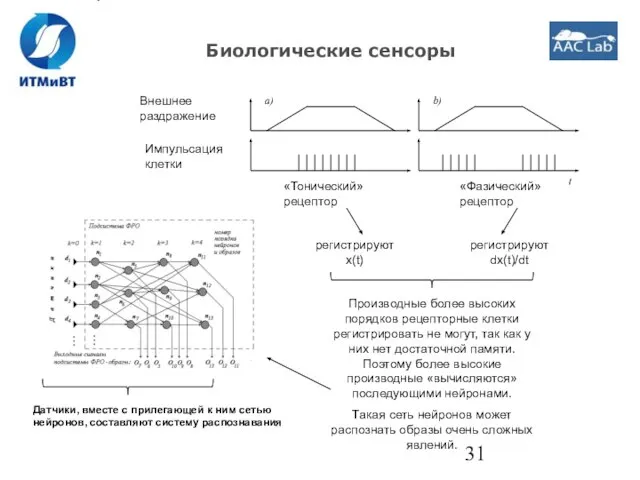
- 31. Биологические сенсоры Производные более высоких порядков рецепторные клетки регистрировать не могут, так как у них нет
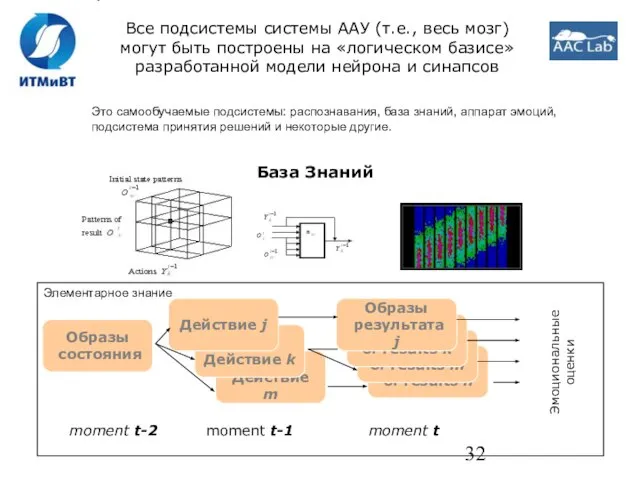
- 32. Все подсистемы системы ААУ (т.е., весь мозг) могут быть построены на «логическом базисе» разработанной модели нейрона
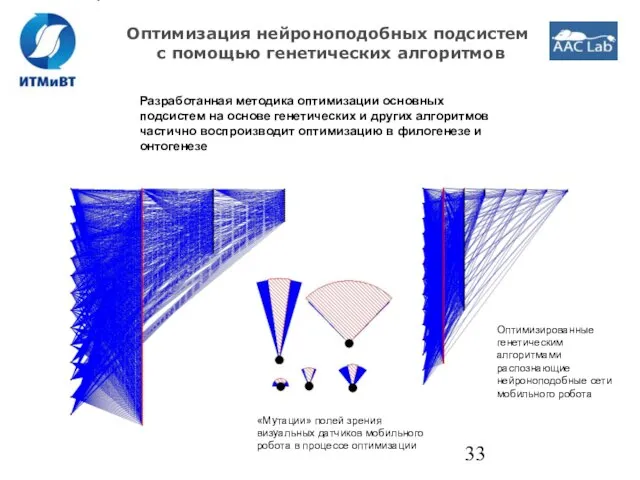
- 33. Оптимизация нейроноподобных подсистем с помощью генетических алгоритмов Разработанная методика оптимизации основных подсистем на основе генетических и
- 34. 4. Примеры прототипов прикладных адаптивных систем на основе метода ААУ - машины с искусственными нервными системами
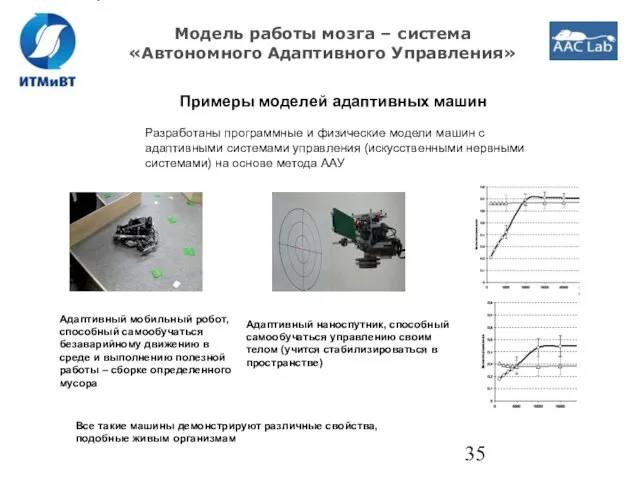
- 35. Модель работы мозга – система «Автономного Адаптивного Управления» Разработаны программные и физические модели машин с адаптивными
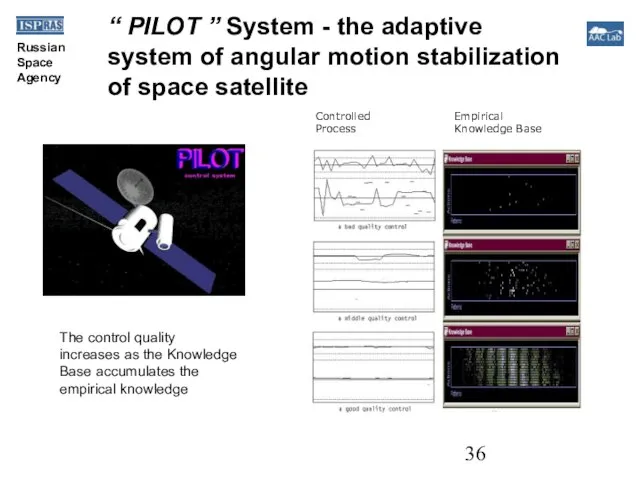
- 36. The control quality increases as the Knowledge Base accumulates the empirical knowledge Russian Space Agency “
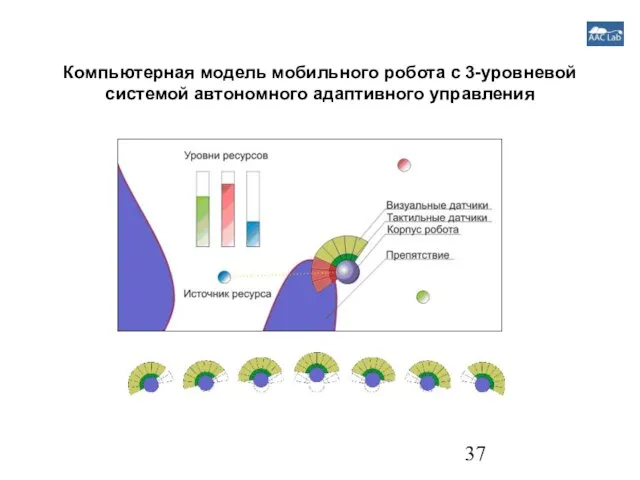
- 37. Компьютерная модель мобильного робота с 3-уровневой системой автономного адаптивного управления
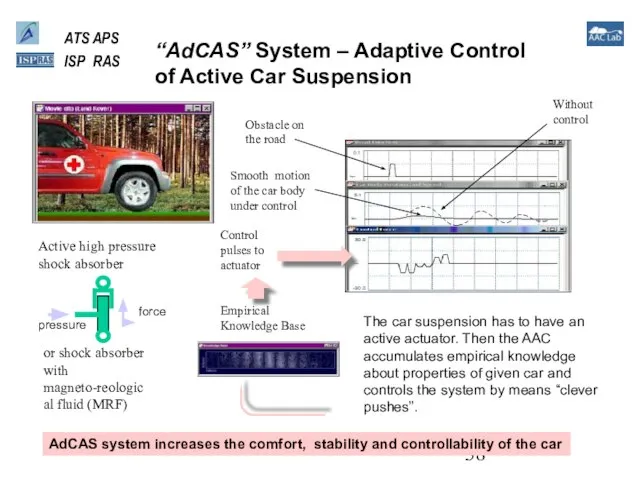
- 38. “AdCAS” System – Adaptive Control of Active Car Suspension The car suspension has to have an
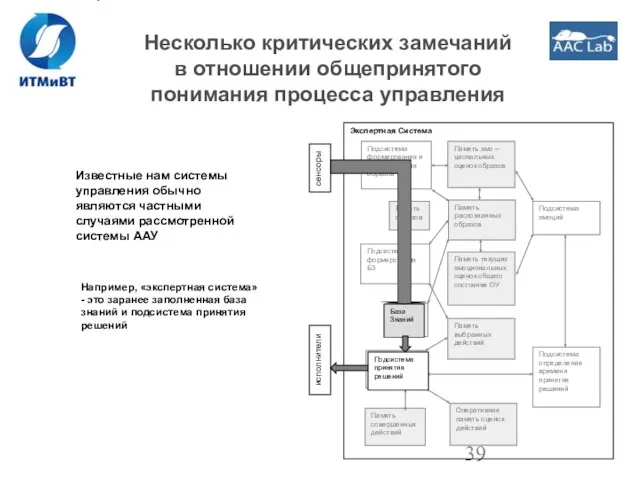
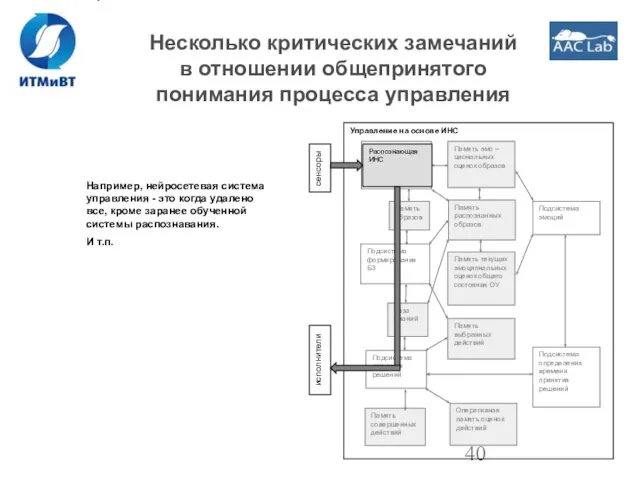
- 39. Несколько критических замечаний в отношении общепринятого понимания процесса управления Известные нам системы управления обычно являются частными
- 40. Несколько критических замечаний в отношении общепринятого понимания процесса управления Например, нейросетевая система управления - это когда
- 41. Технологические причины отсутствия адаптивных машин сегодня Все технологические процессы сегодня основаны на оптимизационных идеях. Проблемы адаптивности
- 42. Психологические причины отсутствия адаптивных машин Рынок не сформирован, так как пока нет спроса. Никто не знает
- 44. Скачать презентацию
Слайд 2План
Неизбежность появления адаптивных машин
Метод Автономного Адаптивного Управления (ААУ)
Зрение в биологических и бионических
План
Неизбежность появления адаптивных машин
Метод Автономного Адаптивного Управления (ААУ)
Зрение в биологических и бионических
Слайд 31. Неизбежность появления адаптивных машин
Создавая техногенную среду, мы повторяем – переоткрываем и
1. Неизбежность появления адаптивных машин
Создавая техногенную среду, мы повторяем – переоткрываем и
Слайд 4Основные вклады науки
в технологию
Количество (до XIX века)
Качество (XIX век)
Оптимальность (ХХ век)
Что
Основные вклады науки
в технологию
Количество (до XIX века)
Качество (XIX век)
Оптимальность (ХХ век)
Что
Слайд 5Адаптивность в природе
В природе мы видим, что все объекты адаптивны, благодаря чему
Адаптивность в природе
В природе мы видим, что все объекты адаптивны, благодаря чему
Слайд 6Адаптивность в техносфере
В техносфере мы видим полное отсутствие адаптивных (самоприспосабливающихся) объектов
Наши машины
Адаптивность в техносфере
В техносфере мы видим полное отсутствие адаптивных (самоприспосабливающихся) объектов
Наши машины
Слайд 7Сегодня адаптивных машин
практически нет
Видел ли кто-нибудь, как обучаются роботы?
Никто не
Сегодня адаптивных машин
практически нет
Видел ли кто-нибудь, как обучаются роботы?
Никто не
Слайд 8Что такое «адаптивность»
Определение
Адаптивностью будем называть способность системы управления автономного объекта добывать
Что такое «адаптивность»
Определение
Адаптивностью будем называть способность системы управления автономного объекта добывать
Слайд 9Причины отсутствия адаптивных машин сегодня
Научные причины
Технологические причины
Психологические причины
Причины отсутствия адаптивных машин сегодня
Научные причины
Технологические причины
Психологические причины
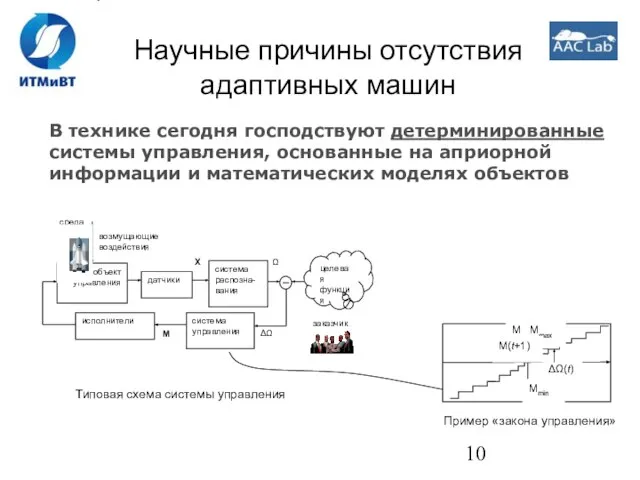
Слайд 10Научные причины отсутствия адаптивных машин
В технике сегодня господствуют детерминированные системы управления, основанные
Научные причины отсутствия адаптивных машин
В технике сегодня господствуют детерминированные системы управления, основанные
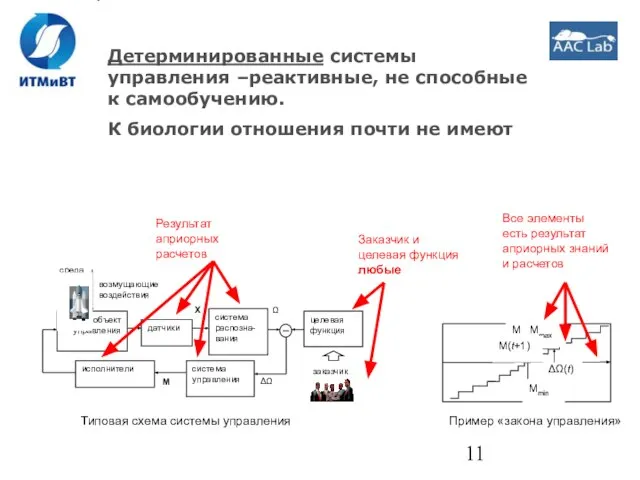
Слайд 11Детерминированные системы управления –реактивные, не способные к самообучению.
К биологии отношения почти
Детерминированные системы управления –реактивные, не способные к самообучению.
К биологии отношения почти
Слайд 12Основные отличия от мозга:
1. Биологический «заказчик» и объект управления (тело) в Природе –
Основные отличия от мозга:
1. Биологический «заказчик» и объект управления (тело) в Природе –
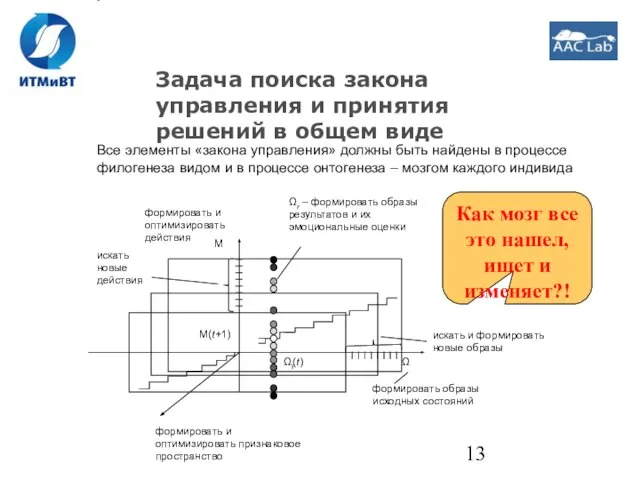
Слайд 13Задача поиска закона управления и принятия решений в общем виде
Все элементы «закона
Задача поиска закона управления и принятия решений в общем виде
Все элементы «закона
Слайд 14Задача поиска закона управления и принятия решений в общем виде
Технических систем управления
Задача поиска закона управления и принятия решений в общем виде
Технических систем управления
Слайд 15Мозг, как объект изучения, морфологически очень сложен (1011 нейронов, 1014 межнейронных связей).
Мозг, как объект изучения, морфологически очень сложен (1011 нейронов, 1014 межнейронных связей).
Слайд 16В биологии господствует понимание процесса управления в виде рефлекторной дуги с модуляцией
-
В биологии господствует понимание процесса управления в виде рефлекторной дуги с модуляцией
-
Слайд 17Некоторые понятия ФС сегодня могут быть уточнены и конкретизированы
Функциональная система
П.К.
Некоторые понятия ФС сегодня могут быть уточнены и конкретизированы
Функциональная система
П.К.

Слайд 18Функция мозга в системе «среда – организм»
Отсюда следуют:
целевые функции мозга
перечень решаемых
Функция мозга в системе «среда – организм»
Отсюда следуют:
целевые функции мозга
перечень решаемых
Слайд 19Жданов А.А. Автономный искусственный интеллект. Монография. М.: БИНОМ. Лаборатория знаний, 2008.
Изд-е 2-е:
Жданов А.А. Автономный искусственный интеллект. Монография. М.: БИНОМ. Лаборатория знаний, 2008. Изд-е 2-е:
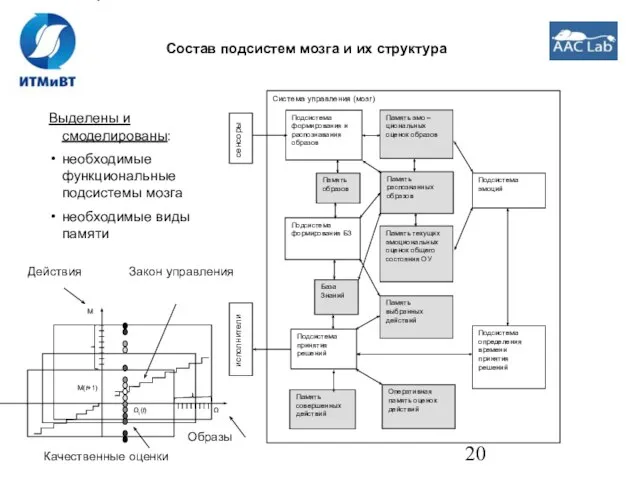
Слайд 20Состав подсистем мозга и их структура
Выделены и смоделированы:
необходимые функциональные подсистемы мозга
необходимые
Состав подсистем мозга и их структура
Выделены и смоделированы:
необходимые функциональные подсистемы мозга
необходимые
Слайд 21Объекты:
T – набор датчиков,
X – вектор входной информации,
Ra – набор априорных
Объекты:
T – набор датчиков,
X – вектор входной информации,
Ra – набор априорных
Слайд 22Идея адаптивного управления
Не аналитические модели ОУ, а эмпирически найденные отображения между дискретными
Идея адаптивного управления
Не аналитические модели ОУ, а эмпирически найденные отображения между дискретными
Слайд 233. Машинное зрение
– отображение явлений, необходимых для принятия решений – самообучаемая
3. Машинное зрение
– отображение явлений, необходимых для принятия решений – самообучаемая
Слайд 24Машинное зрение – отображение явлений, необходимых для принятия решений
«Правильность» образов, действий и
Машинное зрение – отображение явлений, необходимых для принятия решений
«Правильность» образов, действий и
Слайд 25Принципы реализации основных подсистем системы ААУ на основе нейронных элементов и структур
Предложены
Принципы реализации основных подсистем системы ААУ на основе нейронных элементов и структур
Предложены
Слайд 26Свойства самообучаемой системы распознавания образов на основе моделей нейронов в методе ААУ
Пример
Свойства самообучаемой системы распознавания образов на основе моделей нейронов в методе ААУ
Пример
Слайд 27Пример упреждающего распознавания образа – эффект предсказания
Пример упреждающего распознавания образа – эффект предсказания
Слайд 28Модель работы мозга – система «Автономного Адаптивного Управления»
Пример обучения, запуска и останова
Модель работы мозга – система «Автономного Адаптивного Управления»
Пример обучения, запуска и останова
Слайд 29Самообучаемая распознающая нейроноподобная система мобильного робота Гном №9 состоит из 3-х слоев
Самообучаемая распознающая нейроноподобная система мобильного робота Гном №9 состоит из 3-х слоев

Слайд 30Учет синаптических задержек
в модели нейрона
Образы пространственно-временных явлений
Учет синаптических задержек
в модели нейрона
Образы пространственно-временных явлений
Слайд 31Биологические сенсоры
Производные более высоких порядков рецепторные клетки регистрировать не могут, так как
Биологические сенсоры
Производные более высоких порядков рецепторные клетки регистрировать не могут, так как
Слайд 32Все подсистемы системы ААУ (т.е., весь мозг) могут быть построены на «логическом
Все подсистемы системы ААУ (т.е., весь мозг) могут быть построены на «логическом
Слайд 33Оптимизация нейроноподобных подсистем
с помощью генетических алгоритмов
Разработанная методика оптимизации основных подсистем на
Оптимизация нейроноподобных подсистем
с помощью генетических алгоритмов
Разработанная методика оптимизации основных подсистем на
Слайд 344. Примеры прототипов прикладных адаптивных систем на основе метода ААУ
- машины с
4. Примеры прототипов прикладных адаптивных систем на основе метода ААУ
- машины с
Слайд 35Модель работы мозга – система «Автономного Адаптивного Управления»
Разработаны программные и физические модели
Модель работы мозга – система «Автономного Адаптивного Управления»
Разработаны программные и физические модели
Слайд 36The control quality increases as the Knowledge Base accumulates the empirical knowledge
The control quality increases as the Knowledge Base accumulates the empirical knowledge
Слайд 37Компьютерная модель мобильного робота с 3-уровневой системой автономного адаптивного управления
Компьютерная модель мобильного робота с 3-уровневой системой автономного адаптивного управления
Слайд 38“AdCAS” System – Adaptive Control
of Active Car Suspension
The car suspension has
“AdCAS” System – Adaptive Control
of Active Car Suspension
The car suspension has
Слайд 39Несколько критических замечаний в отношении общепринятого понимания процесса управления
Известные нам системы
Несколько критических замечаний в отношении общепринятого понимания процесса управления
Известные нам системы
Слайд 40Несколько критических замечаний в отношении общепринятого понимания процесса управления
Например, нейросетевая система
Несколько критических замечаний в отношении общепринятого понимания процесса управления
Например, нейросетевая система
Слайд 41Технологические причины отсутствия адаптивных машин сегодня
Все технологические процессы сегодня основаны на оптимизационных
Технологические причины отсутствия адаптивных машин сегодня
Все технологические процессы сегодня основаны на оптимизационных
Слайд 42Психологические причины отсутствия адаптивных машин
Рынок не сформирован, так как пока нет
Психологические причины отсутствия адаптивных машин
Рынок не сформирован, так как пока нет
 Powracam do Boga
Powracam do Boga ПРИРОДНЫЕ СООБЩЕСТВА ВОКРУГ НАС (биология, экология)
ПРИРОДНЫЕ СООБЩЕСТВА ВОКРУГ НАС (биология, экология) Uchebnaya_praktika_Golub_Maria_20PI-2
Uchebnaya_praktika_Golub_Maria_20PI-2 Резьба. Изображение резьбы
Резьба. Изображение резьбы Socjalizacja do kultury fizycznej
Socjalizacja do kultury fizycznej Супер Маша
Супер Маша Ahunbaev Isa Konoevich
Ahunbaev Isa Konoevich Системный подход к освоению месторождений с учетом природно-техногенных изменений недр – основа углеводорододобывающего промыс
Системный подход к освоению месторождений с учетом природно-техногенных изменений недр – основа углеводорододобывающего промыс Ахиллесова пята
Ахиллесова пята Теорема о вписанном угле в окружность.
Теорема о вписанном угле в окружность. Тема: Биотические факторы среды
Тема: Биотические факторы среды Бизнес-Менеджер АГРО Блок «Интерактивная карта»
Бизнес-Менеджер АГРО Блок «Интерактивная карта» Архитектура барокко
Архитектура барокко Система подготовки учащихся к ЕГЭ по обществознанию
Система подготовки учащихся к ЕГЭ по обществознанию Конфигурация «Клиент Федерального казначейства. Администратор доходов» на платформе 1С:Предприятие 8
Конфигурация «Клиент Федерального казначейства. Администратор доходов» на платформе 1С:Предприятие 8 Welcome to Great Britain
Welcome to Great Britain  SoveTshennoletniy
SoveTshennoletniy Европейская экономическая комиссия ООН Подготовила: Клеутина С.А. ДС_01
Европейская экономическая комиссия ООН Подготовила: Клеутина С.А. ДС_01 О, спорт, ты – мир!!! 6 класс
О, спорт, ты – мир!!! 6 класс Рождество в Великобретании
Рождество в Великобретании Метод координат
Метод координат Разработка стратегии образовательного учреждения: вводные замечания
Разработка стратегии образовательного учреждения: вводные замечания Неиспользуемые объекты недвижимости, предлагаемые для продажи
Неиспользуемые объекты недвижимости, предлагаемые для продажи Научный комплекс
Научный комплекс Таможенное дело. Электронное декларирование
Таможенное дело. Электронное декларирование О правилах питания
О правилах питания Презентация на тему Решение задач. Закрепление (2 класс)
Презентация на тему Решение задач. Закрепление (2 класс) ДОБРОКАЧЕСТВЕННЫЕ ОПУХОЛИ ЖЕНСКИХ ПОЛОВЫХ ОРГАНОВ (лекция)
ДОБРОКАЧЕСТВЕННЫЕ ОПУХОЛИ ЖЕНСКИХ ПОЛОВЫХ ОРГАНОВ (лекция)