- Электрический привод. Асинхронный электропривод

Содержание
- 2. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА Простые модели асинхронного электропривода Сложности при получении полного математического описания процессов в асинхронной
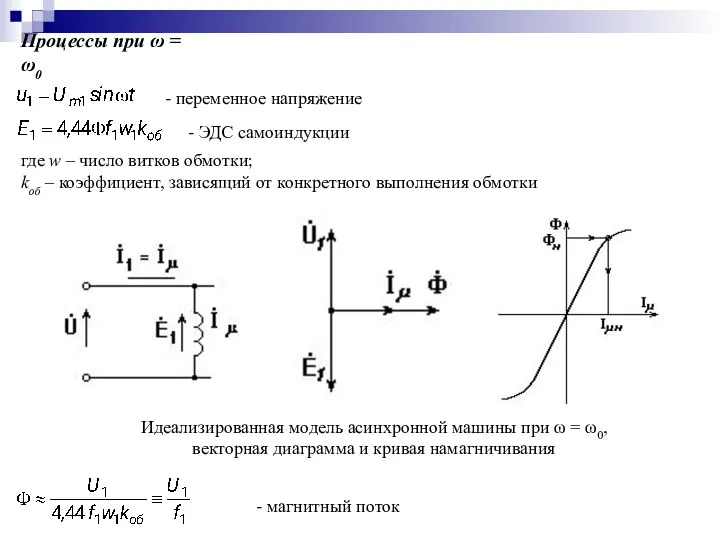
- 3. Процессы при ω = ω0 . - переменное напряжение - ЭДС самоиндукции где w – число
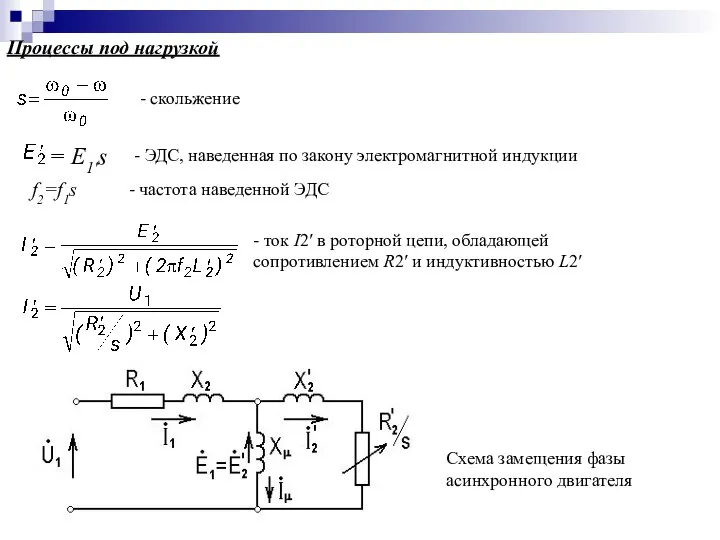
- 4. Процессы под нагрузкой - скольжение = E1′s f2=f1s - ЭДС, наведенная по закону электромагнитной индукции -
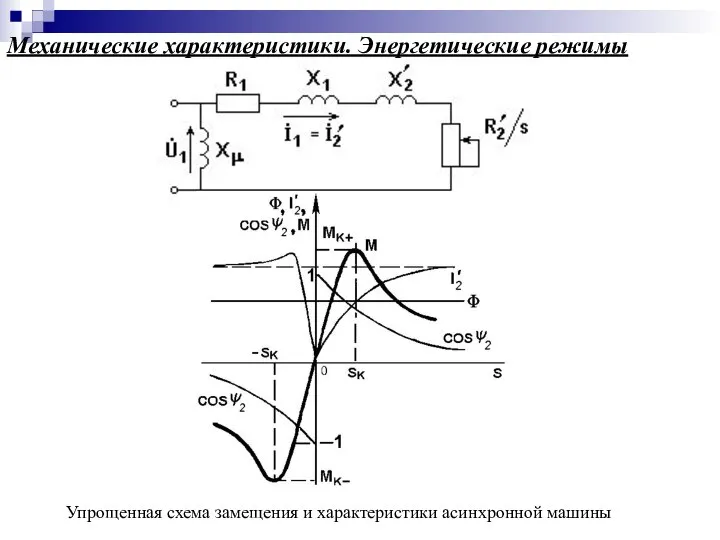
- 5. Механические характеристики. Энергетические режимы Упрощенная схема замещения и характеристики асинхронной машины
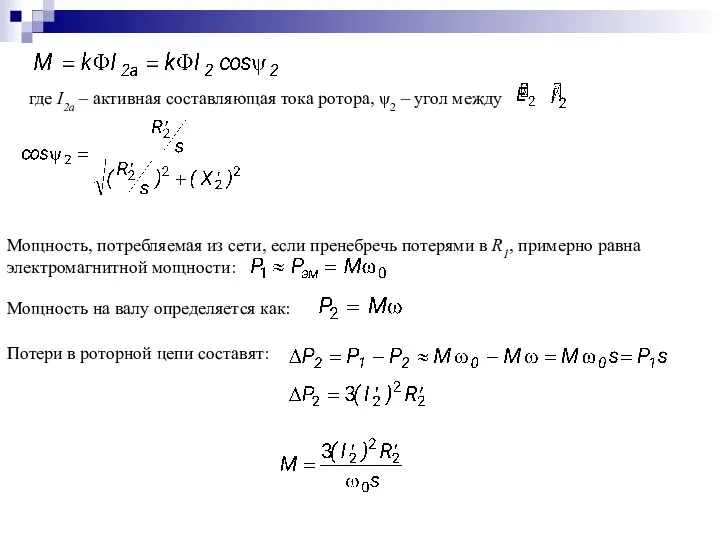
- 6. где I2а – активная составляющая тока ротора, ψ2 – угол между Мощность, потребляемая из сети, если
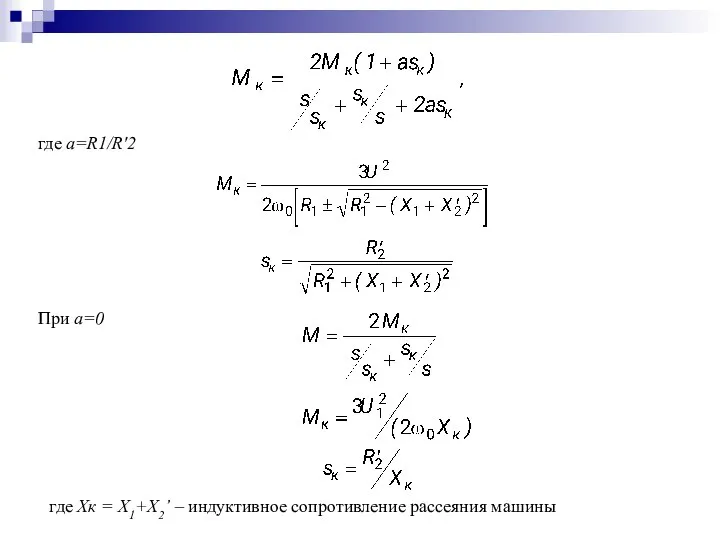
- 7. где а=R1/R′2 При а=0 где Хк = Х1+Х2’ – индуктивное сопротивление рассеяния машины
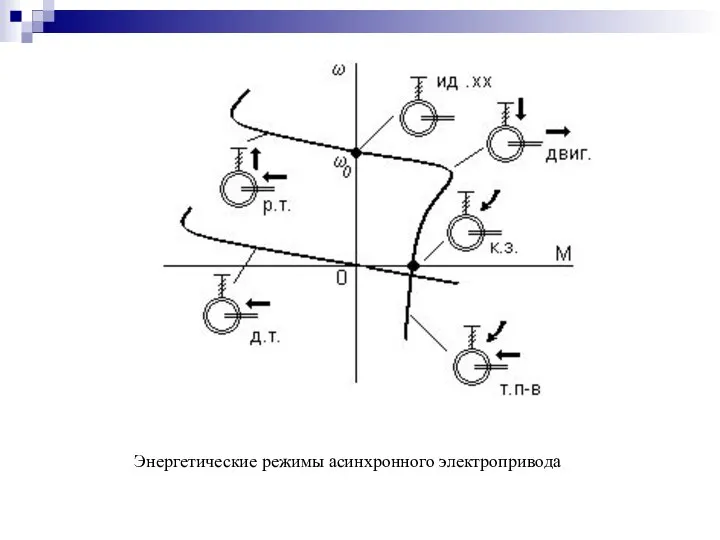
- 8. Энергетические режимы асинхронного электропривода
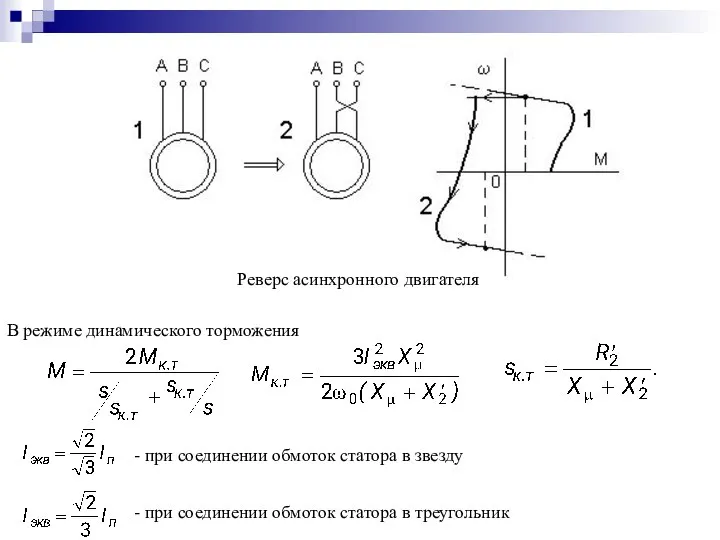
- 9. Реверс асинхронного двигателя В режиме динамического торможения - при соединении обмоток статора в звезду - при
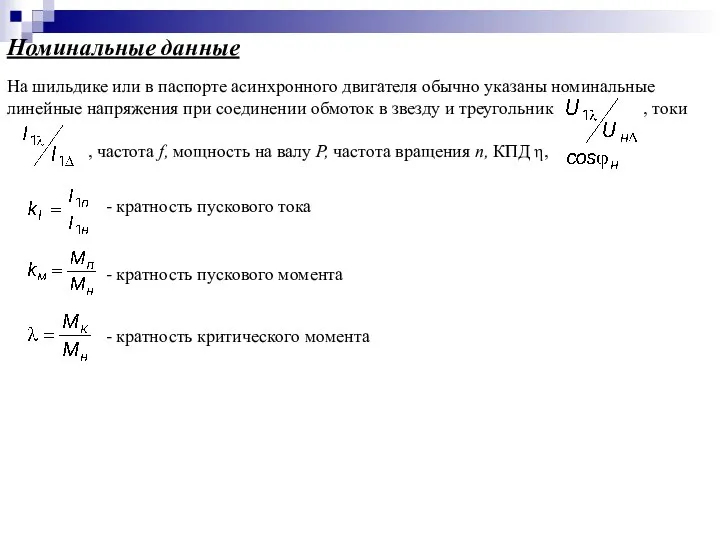
- 10. Номинальные данные На шильдике или в паспорте асинхронного двигателя обычно указаны номинальные линейные напряжения при соединении
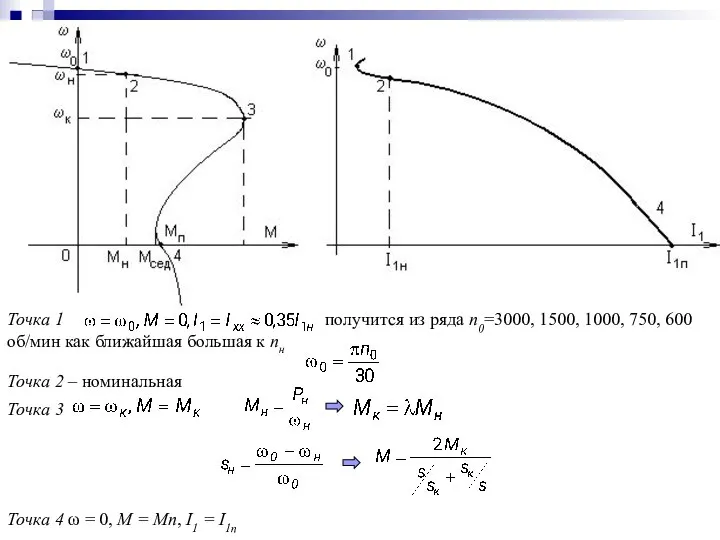
- 11. Точка 1 получится из ряда n0=3000, 1500, 1000, 750, 600 об/мин как ближайшая большая к nн
- 13. Скачать презентацию
Слайд 2ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Простые модели асинхронного электропривода
Сложности при получении полного математического описания
ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Простые модели асинхронного электропривода
Сложности при получении полного математического описания
Слайд 3Процессы при ω = ω0
.
- переменное напряжение
- ЭДС самоиндукции
где
Процессы при ω = ω0
.
- переменное напряжение
- ЭДС самоиндукции
где
Слайд 4Процессы под нагрузкой
- скольжение
= E1′s
f2=f1s
- ЭДС, наведенная по
Процессы под нагрузкой
- скольжение
= E1′s
f2=f1s
- ЭДС, наведенная по
Слайд 5Механические характеристики. Энергетические режимы
Упрощенная схема замещения и характеристики асинхронной машины
Механические характеристики. Энергетические режимы
Упрощенная схема замещения и характеристики асинхронной машины
Слайд 6где I2а – активная составляющая тока ротора, ψ2 – угол между
Мощность,
где I2а – активная составляющая тока ротора, ψ2 – угол между
Мощность,
Слайд 7где а=R1/R′2
При а=0
где Хк = Х1+Х2’ – индуктивное сопротивление рассеяния машины
где а=R1/R′2
При а=0
где Хк = Х1+Х2’ – индуктивное сопротивление рассеяния машины
Слайд 8Энергетические режимы асинхронного электропривода
Энергетические режимы асинхронного электропривода
Слайд 9Реверс асинхронного двигателя
В режиме динамического торможения
- при соединении обмоток статора в
Реверс асинхронного двигателя
В режиме динамического торможения
- при соединении обмоток статора в
Слайд 10Номинальные данные
На шильдике или в паспорте асинхронного двигателя обычно указаны номинальные
Номинальные данные
На шильдике или в паспорте асинхронного двигателя обычно указаны номинальные
Слайд 11Точка 1 получится из ряда n0=3000, 1500, 1000, 750, 600 об/мин как
Точка 1 получится из ряда n0=3000, 1500, 1000, 750, 600 об/мин как
 SA-DCT
SA-DCT Детская квадрошкола ATV Kids Academy
Детская квадрошкола ATV Kids Academy Презентация на тему Политические партии
Презентация на тему Политические партии Реляционная база данных MS Access
Реляционная база данных MS Access Прямое плетение. Плетеный объемный короб
Прямое плетение. Плетеный объемный короб Хронология S.T.A.L.K.E.R
Хронология S.T.A.L.K.E.R Курилы - незаконченная страница в истории русско-японских отношений
Курилы - незаконченная страница в истории русско-японских отношений Правительство Московской области
Правительство Московской области Дорога жизни
Дорога жизни INPRO Action Plan “Legal and Institutional Issues of Nuclear Energy Supply by TNIs”: Scope, Contents, Definitions
INPRO Action Plan “Legal and Institutional Issues of Nuclear Energy Supply by TNIs”: Scope, Contents, Definitions Мобильные приложения: разработка для платформы «1С-Битрикс»
Мобильные приложения: разработка для платформы «1С-Битрикс» Природные и рукотворные формы в натюрморте
Природные и рукотворные формы в натюрморте Текила. Подача
Текила. Подача Моделирование плечевой одежды
Моделирование плечевой одежды Александр Беляев Голова профессора Доуэля
Александр Беляев Голова профессора Доуэля Жизнь и творчество Николая Васильевича Гоголя
Жизнь и творчество Николая Васильевича Гоголя Природная зональность 2 класс
Природная зональность 2 класс Культура России 4 класс - презентация для начальной школы_
Культура России 4 класс - презентация для начальной школы_ Магазин спортивной одежды Besteam Sport
Магазин спортивной одежды Besteam Sport  Презентация на тему Расчет экспортной, импортной квот за период с 2000 по 2012 годы в Бразилии и Китае
Презентация на тему Расчет экспортной, импортной квот за период с 2000 по 2012 годы в Бразилии и Китае  Problem Solving
Problem Solving Словарная работа
Словарная работа Изучение возможностей влияния звезд на учебно–воспитательный процесс школы
Изучение возможностей влияния звезд на учебно–воспитательный процесс школы Юскинской школе 130 лет
Юскинской школе 130 лет Влияние стресса на профессиональную деятельность педагога
Влияние стресса на профессиональную деятельность педагога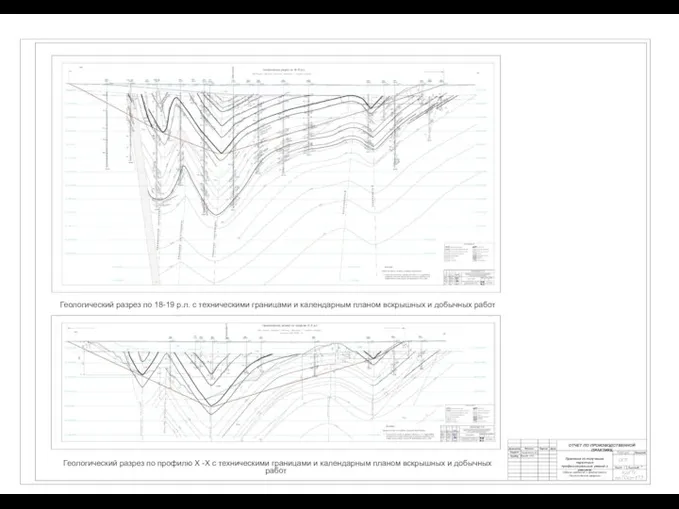 Геологический разрез по 18-19 р.л. с техническими границами и календарным планом вскрышных и добычных работ
Геологический разрез по 18-19 р.л. с техническими границами и календарным планом вскрышных и добычных работ A city mouse or a country mouse
A city mouse or a country mouse Единый семинар Правила использования программного обеспечения фирмы «
Единый семинар Правила использования программного обеспечения фирмы «