- Коррекция нелинейных систем

Содержание
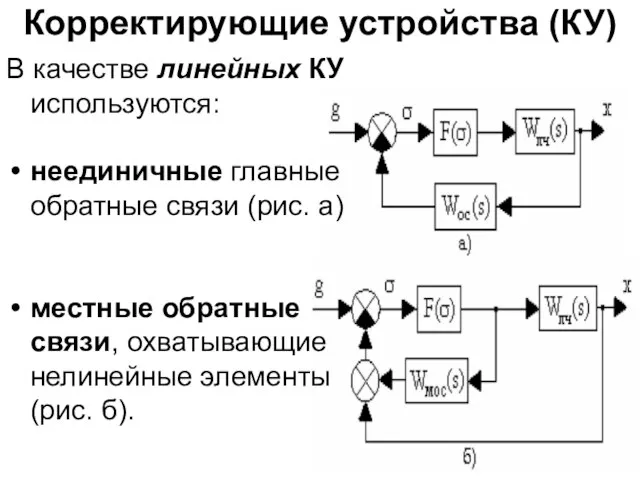
- 2. Корректирующие устройства (КУ) В качестве линейных КУ используются: неединичные главные обратные связи (рис. а) местные обратные
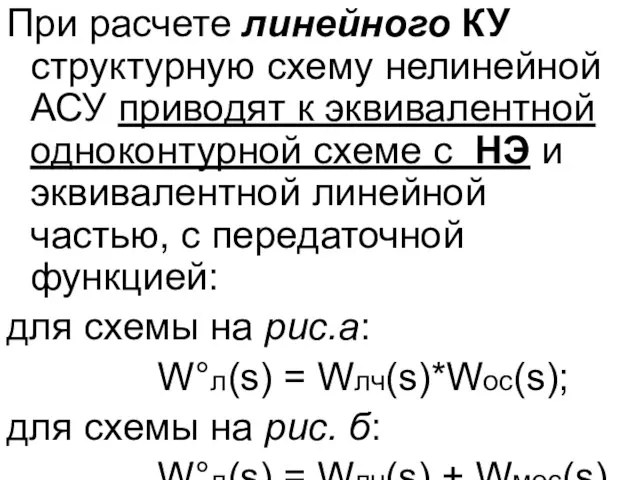
- 3. При расчете линейного КУ структурную схему нелинейной АСУ приводят к эквивалентной одноконтурной схеме с НЭ и
- 4. Компенсация влияния нелинейности (нелинейные КУ) Позволяет рассматривать нелинейную АСУ как линейную относительно определенных входных воздействий. В
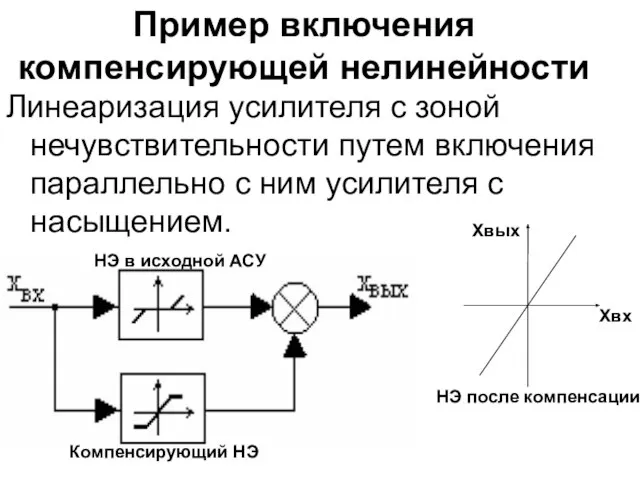
- 5. Пример включения компенсирующей нелинейности Линеаризация усилителя с зоной нечувствительности путем включения параллельно с ним усилителя с
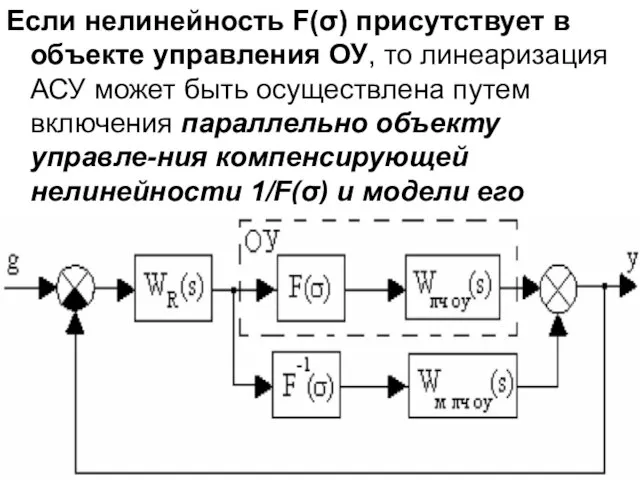
- 6. Если нелинейность F(σ) присутствует в объекте управления ОУ, то линеаризация АСУ может быть осуществлена путем включения
- 7. Вибрационная компенсация нелинейностей НЭ проявляет себя как линейный, если на его вход вместе с полезным медленно
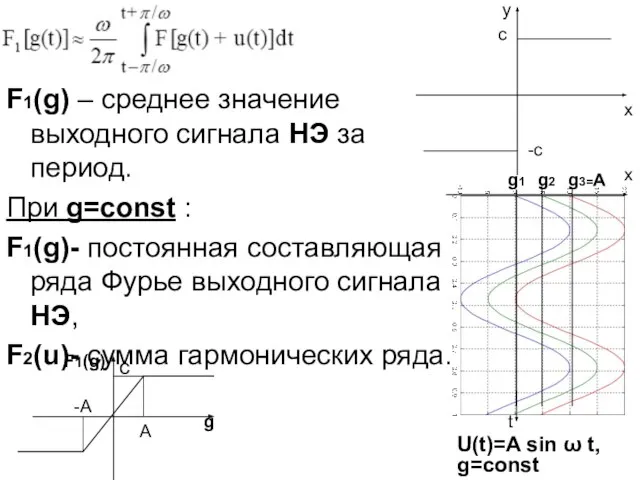
- 8. F1(g) – среднее значение выходного сигнала НЭ за период. При g=const : F1(g)- постоянная составляющая ряда
- 9. В пределах ±A статическая характеристика F1(g) линейна с коэффициентом передачи kу=c/A. Чем больше A компенсирующих колебаний
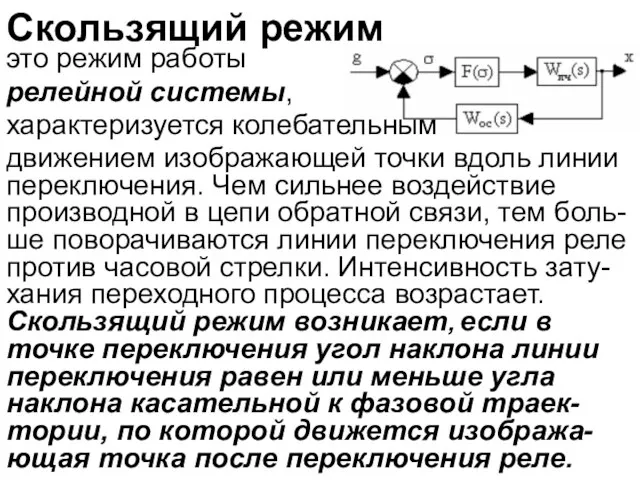
- 10. Скользящий режим это режим работы релейной системы, характеризуется колебательным движением изображающей точки вдоль линии переключения. Чем
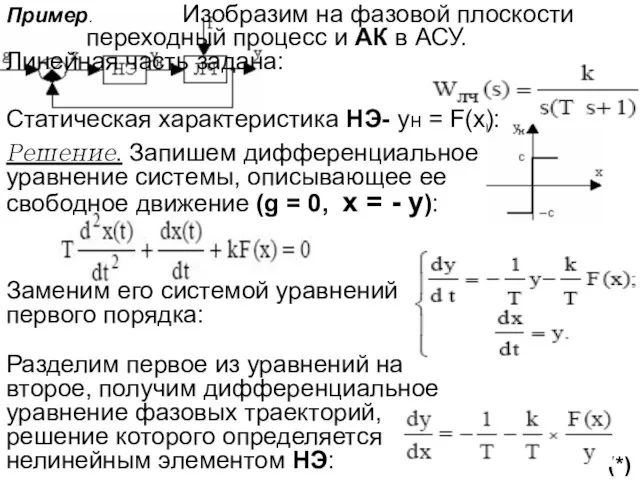
- 11. Пример. Изобразим на фазовой плоскости переходный процесс и АК в АСУ. Линейная часть задана: Статическая характеристика
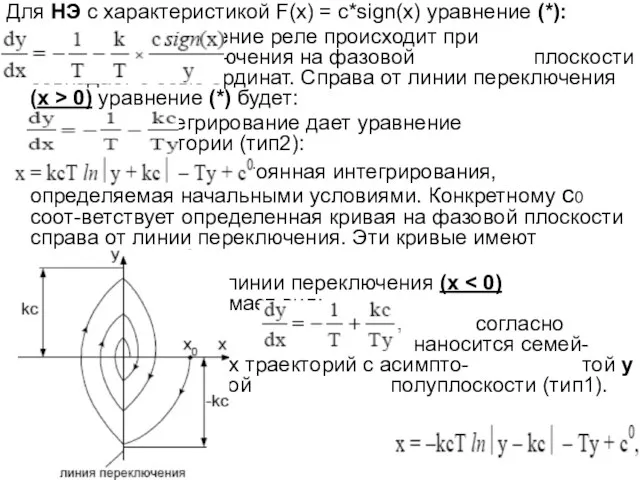
- 12. Для НЭ с характеристикой F(x) = c*sign(x) уравнение (*): Переключение реле происходит при x= 0. Линия
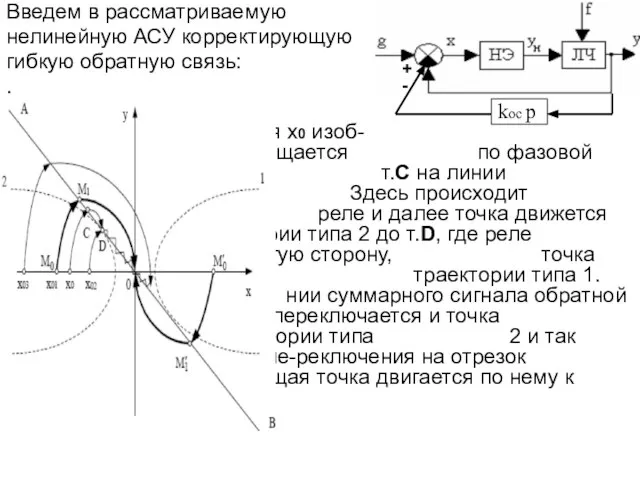
- 13. Введем в рассматриваемую нелинейную АСУ корректирующую гибкую обратную связь: . Из начального состояния x0 изоб- ражающая
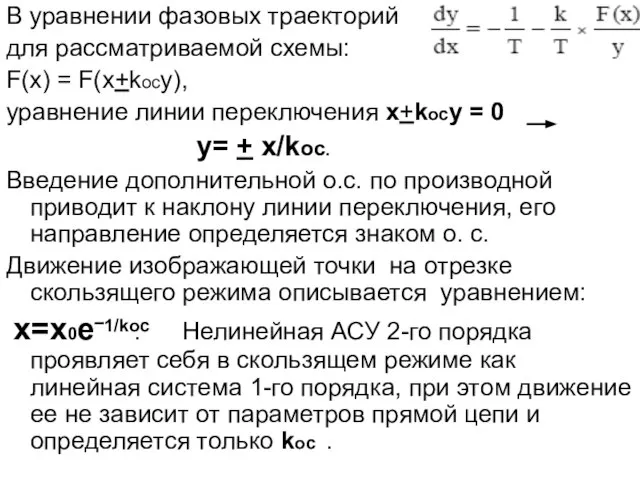
- 14. В уравнении фазовых траекторий для рассматриваемой схемы: F(x) = F(x+kocy), уравнение линии переключения x+kocy = 0
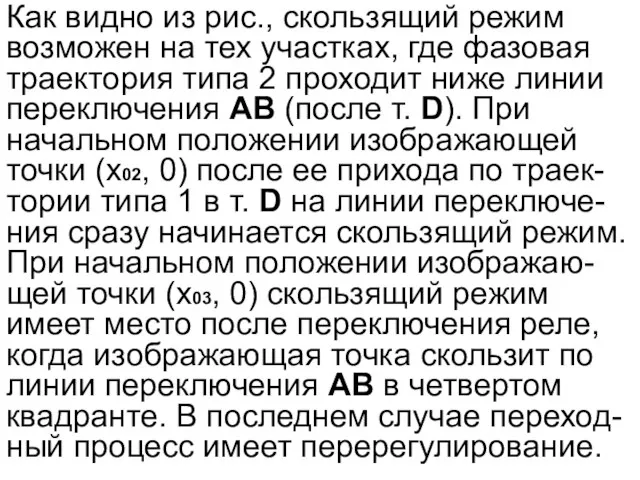
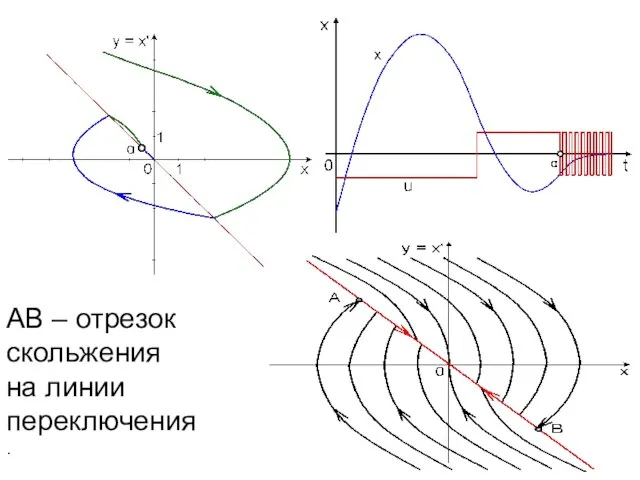
- 15. Как видно из рис., скользящий режим возможен на тех участках, где фазовая траектория типа 2 проходит
- 16. АВ – отрезок скольжения на линии переключения.
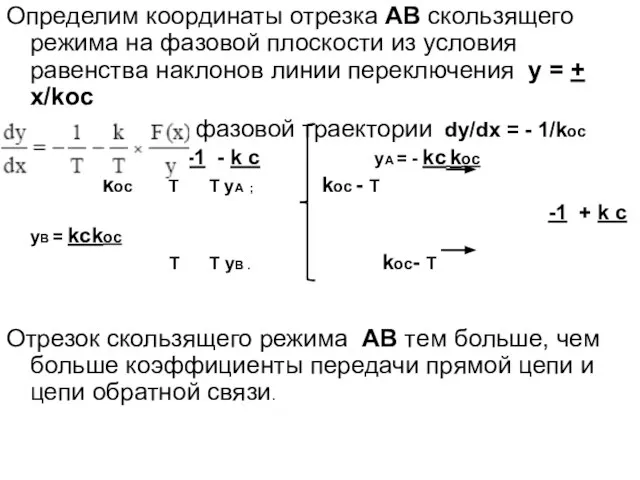
- 17. Определим координаты отрезка АВ скользящего режима на фазовой плоскости из условия равенства наклонов линии переключения y
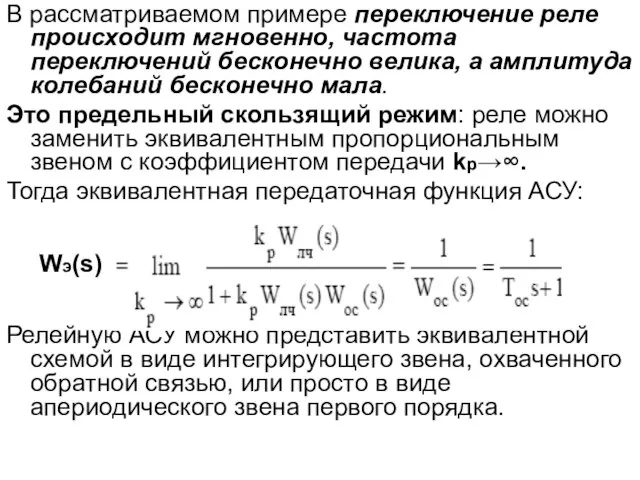
- 18. В рассматриваемом примере переключение реле происходит мгновенно, частота переключений бесконечно велика, а амплитуда колебаний бесконечно мала.
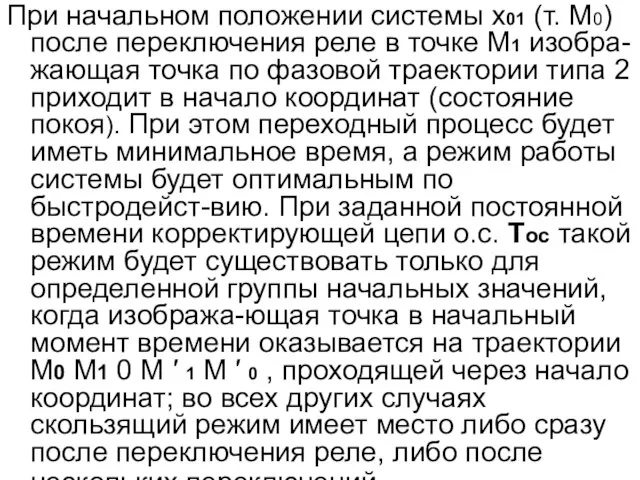
- 19. При начальном положении системы x01 (т. M0) после переключения реле в точке M1 изобра-жающая точка по
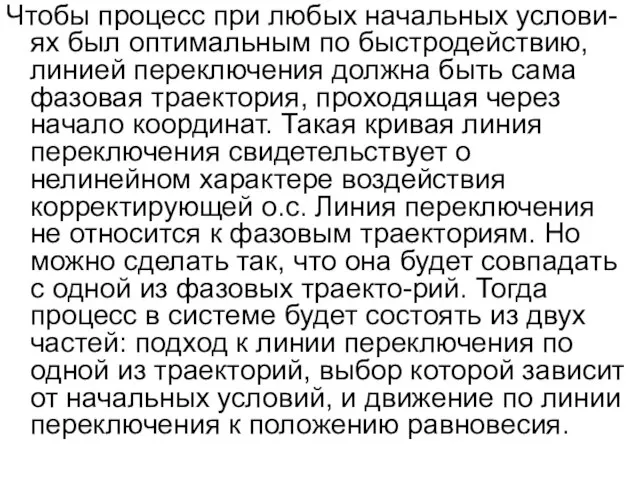
- 20. Чтобы процесс при любых начальных услови-ях был оптимальным по быстродействию, линией переключения должна быть сама фазовая
- 22. Скачать презентацию
Слайд 2Корректирующие устройства (КУ)
В качестве линейных КУ используются:
неединичные главные обратные связи (рис. а)
местные
Корректирующие устройства (КУ)
В качестве линейных КУ используются:
неединичные главные обратные связи (рис. а)
местные
Слайд 3При расчете линейного КУ структурную схему нелинейной АСУ приводят к эквивалентной одноконтурной
При расчете линейного КУ структурную схему нелинейной АСУ приводят к эквивалентной одноконтурной
Слайд 4Компенсация влияния нелинейности (нелинейные КУ)
Позволяет рассматривать нелинейную АСУ как линейную относительно определенных
Компенсация влияния нелинейности (нелинейные КУ)
Позволяет рассматривать нелинейную АСУ как линейную относительно определенных
Слайд 5Пример включения компенсирующей нелинейности
Линеаризация усилителя с зоной нечувствительности путем включения параллельно с
Пример включения компенсирующей нелинейности
Линеаризация усилителя с зоной нечувствительности путем включения параллельно с
Слайд 6Если нелинейность F(σ) присутствует в объекте управления ОУ, то линеаризация АСУ может
Если нелинейность F(σ) присутствует в объекте управления ОУ, то линеаризация АСУ может
Слайд 7Вибрационная компенсация нелинейностей
НЭ проявляет себя как линейный, если на его вход вместе
Вибрационная компенсация нелинейностей
НЭ проявляет себя как линейный, если на его вход вместе

Слайд 8F1(g) – среднее значение выходного сигнала НЭ за период.
При g=const :
F1(g) – среднее значение выходного сигнала НЭ за период.
При g=const :
Слайд 9В пределах ±A статическая характеристика F1(g) линейна с коэффициентом передачи kу=c/A.
Чем
В пределах ±A статическая характеристика F1(g) линейна с коэффициентом передачи kу=c/A.
Чем
Слайд 10Скользящий режим
это режим работы
релейной системы,
характеризуется колебательным
движением изображающей точки вдоль
Скользящий режим
это режим работы
релейной системы,
характеризуется колебательным
движением изображающей точки вдоль
Слайд 11Пример. Изобразим на фазовой плоскости переходный процесс и АК в АСУ. Линейная
Пример. Изобразим на фазовой плоскости переходный процесс и АК в АСУ. Линейная
Слайд 12Для НЭ с характеристикой F(x) = c*sign(x) уравнение (*):
Переключение реле происходит
Для НЭ с характеристикой F(x) = c*sign(x) уравнение (*):
Переключение реле происходит
Слайд 13Введем в рассматриваемую
нелинейную АСУ корректирующую
гибкую обратную связь:
.
Из начального
Введем в рассматриваемую
нелинейную АСУ корректирующую
гибкую обратную связь:
.
Из начального
Слайд 14В уравнении фазовых траекторий
для рассматриваемой схемы:
F(x) = F(x+kocy),
уравнение линии переключения
В уравнении фазовых траекторий
для рассматриваемой схемы:
F(x) = F(x+kocy),
уравнение линии переключения
Слайд 15Как видно из рис., скользящий режим возможен на тех участках, где фазовая
Как видно из рис., скользящий режим возможен на тех участках, где фазовая
Слайд 16АВ – отрезок скольжения на линии переключения.
АВ – отрезок скольжения на линии переключения.
Слайд 17Определим координаты отрезка АВ скользящего режима на фазовой плоскости из условия равенства
Определим координаты отрезка АВ скользящего режима на фазовой плоскости из условия равенства
Слайд 18В рассматриваемом примере переключение реле происходит мгновенно, частота переключений бесконечно велика, а
В рассматриваемом примере переключение реле происходит мгновенно, частота переключений бесконечно велика, а
Слайд 19При начальном положении системы x01 (т. M0) после переключения реле в точке
При начальном положении системы x01 (т. M0) после переключения реле в точке
Слайд 20Чтобы процесс при любых начальных услови-ях был оптимальным по быстродействию, линией переключения
Чтобы процесс при любых начальных услови-ях был оптимальным по быстродействию, линией переключения
 Реклама - двигатель торговли
Реклама - двигатель торговли ИНТЕЛЛЕКТУАЛЬНАЯ ИГРА«АШКИ ИЛИ ГЭШКИ?»
ИНТЕЛЛЕКТУАЛЬНАЯ ИГРА«АШКИ ИЛИ ГЭШКИ?» Забастовка. Право на забастовку
Забастовка. Право на забастовку Какой бывает транспорт
Какой бывает транспорт Построение осей складок
Построение осей складок Kimono shop
Kimono shop Открытие Show-room РуДа в ТРЦ
Открытие Show-room РуДа в ТРЦ Решение задач на сложение и вычитание смешанных чисел
Решение задач на сложение и вычитание смешанных чисел Критерии деятельности классных руководителей начального звена за 2 полугодие
Критерии деятельности классных руководителей начального звена за 2 полугодие Презентация на тему Решение логарифмических уравнений
Презентация на тему Решение логарифмических уравнений Преподаватель: Жирнова Н.Ю. ОБ УЧАСТИИ ВО ВСЕРОССИЙСКИХ ПЕДАГОГИЧЕСКИХ КОНКУРСАХ.
Преподаватель: Жирнова Н.Ю. ОБ УЧАСТИИ ВО ВСЕРОССИЙСКИХ ПЕДАГОГИЧЕСКИХ КОНКУРСАХ. Яңы йыл байрамы
Яңы йыл байрамы Осциллограф H3015
Осциллограф H3015 Хранение и распределение нефти, нефтепродуктов и газа
Хранение и распределение нефти, нефтепродуктов и газа Кузмицкий Василий Федорович
Кузмицкий Василий Федорович Интересная физика
Интересная физика Как древние люди представляли себе Вселенную
Как древние люди представляли себе Вселенную Школа творческих открытий Русский авангард для детей. Контраст Встреча противоположностей
Школа творческих открытий Русский авангард для детей. Контраст Встреча противоположностей Вознекновение театрв 18 веке
Вознекновение театрв 18 веке История российского парламентаризма
История российского парламентаризма Группа в VKontakte Сообщество инфобизнесменов, проект ИнфоХит
Группа в VKontakte Сообщество инфобизнесменов, проект ИнфоХит Концепция «Единого окна»: ключевой инструмент упрощения процедур торговли и надлежащего управления Марио Апостолов, Р
Концепция «Единого окна»: ключевой инструмент упрощения процедур торговли и надлежащего управления Марио Апостолов, Р Романтизм 11 класс
Романтизм 11 класс Тест на тему: Сила упругости. Закон Гука
Тест на тему: Сила упругости. Закон Гука Manhattan
Manhattan Différenciation sociale du lexique
Différenciation sociale du lexique Samp Stories Epesode one(1)
Samp Stories Epesode one(1) Регрессивный анализ для выявления лучших агентов. Росгосстрах
Регрессивный анализ для выявления лучших агентов. Росгосстрах