равновесия любых самых сложных материальных систем средствами математического анализа. Для этого вводятся новые понятия и обобщаются старые.
■ Связи – рассматриваются теперь как некоторые условия, налагаемые на систему, которые должны удовлетворяться в процессе движения системы. Они содержат соотношения (уравнения или неравенства) между координатами, компонентами скоростей и ускорений и, возможно, времени.
Классификация связей: По интегрируемости:
Голономные (геометрические) – выражаются конечными уравнениями относительно координат или интегрируемыми дифференциальными уравнениями относительно координат:
Неголономные (кинематические) - выражаются неинтегрируемыми дифференциальными уравнениями относительно координат,
т.е. уравнениями, содержащими не только координаты точек системы, но и их производные по времени:
Неинтегрируемость состоит в том, что их нельзя привести к виду уравнений голономной связи.
По зависимости от времени:
Склерономные (стационарные) – не зависящие от времени:
Например, уравнение траектории, полученное для некоторой точки шатуна кривошипно-шатунного механизма:
рассматривается как уравнение cклерономной голономной связи:
Реономные (нестационарные) – зависящие от времени. Например, кинематическое возбуждение колебаний.
По освобождаемости:
Неосвобождающие (удерживающие или двухсторонние) – описываются уравнением, исключающим возможность покидания точкой траектории
или поверхности, описываемой уравнением. Этому соответствует, например, жесткая связь в виде шарнирного стержня.
Освобождающие (неудерживающие или односторонние) – выражаются неравенством, регламентирующим связь лишь в одном направлении, например, гибкая нить или гладкая поверхность.
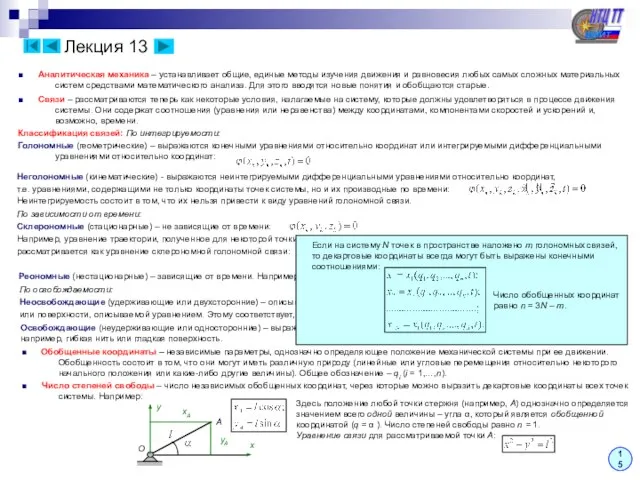
■ Обобщенные координаты – независимые параметры, однозначно определяющее положение механической системы при ее движении. Обобщенность состоит в том, что они могут иметь различную природу (линейные или угловые перемещения относительно некоторого начального положения или какие-либо другие величины). Общее обозначение – qi (i = 1,…,n).
■ Число степеней свободы – число независимых обобщенных координат, через которые можно выразить декартовые координаты всех точек системы. Например:
Здесь положение любой точки стержня (например, А) однозначно определяется значением всего одной величины – угла α, который является обобщенной координатой (q = α ). Число степеней свободы равно n = 1.
Уравнение связи для рассматриваемой точки A:
Если на систему N точек в пространстве наложено m голономных связей,
то декартовые координаты всегда могут быть выражены конечными
соотношениями:
Число обобщенных координат
равно n = 3N – m.

 История военной песни
История военной песни Как можно повысить качество обучениячерез методическую работу?
Как можно повысить качество обучениячерез методическую работу? Составляющие гудвилла
Составляющие гудвилла ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ДЛЯ ПРЕДПРИЯТИЙ БЫСТРОГО ОБСЛУЖИВАНИЯ FAST FOOD
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ДЛЯ ПРЕДПРИЯТИЙ БЫСТРОГО ОБСЛУЖИВАНИЯ FAST FOOD Психологическое консультирование при реактивных состояниях у детей и подростков
Психологическое консультирование при реактивных состояниях у детей и подростков Презентация на тему Вода в природе
Презентация на тему Вода в природе Презентация на тему Изобразительное искусство в семье пластических искусств
Презентация на тему Изобразительное искусство в семье пластических искусств Глава шестаяЗаконы денежного обращения
Глава шестаяЗаконы денежного обращения Методы и способы текстовой задачи
Методы и способы текстовой задачи Профилактика эмоционального выгорания персонала на ООО РоссПолимер
Профилактика эмоционального выгорания персонала на ООО РоссПолимер ПРОВЕРЬ СЕБЯ!
ПРОВЕРЬ СЕБЯ! Презентация на тему Физиология мозжечка и переднего мозга
Презентация на тему Физиология мозжечка и переднего мозга  А что такое катехизис?
А что такое катехизис? Баскетбол: Групповое взаимодействие тройка
Баскетбол: Групповое взаимодействие тройка «Использование информационно-коммуникационных технологий как ресурс активизации познавательного интереса обучающихся на урока
«Использование информационно-коммуникационных технологий как ресурс активизации познавательного интереса обучающихся на урока Декоративно-прикладное искусство как вид изобразительного искусства
Декоративно-прикладное искусство как вид изобразительного искусства Презентация на тему Солнце и жизнь Земли
Презентация на тему Солнце и жизнь Земли У світі народних українських ремесел
У світі народних українських ремесел Корпоративная программа привилегий от застройщика
Корпоративная программа привилегий от застройщика Презентация на тему К. И. Чуковский Федорино горе
Презентация на тему К. И. Чуковский Федорино горе ВСЭ_Туристский маршрут в Пермском крае
ВСЭ_Туристский маршрут в Пермском крае Портфолио как форма организации деятельности студента колледжа
Портфолио как форма организации деятельности студента колледжа Организационная культура
Организационная культура Русская национальная культура в хаосе масскульта и маргинальных форм культуры
Русская национальная культура в хаосе масскульта и маргинальных форм культуры Упр ИТ
Упр ИТ Служба каталога Microsoft Windows Server 2003Назначение Структура Возможности
Служба каталога Microsoft Windows Server 2003Назначение Структура Возможности Шахматы. Что мы знаем о шахматах?
Шахматы. Что мы знаем о шахматах? вставь пропущенную букву
вставь пропущенную букву