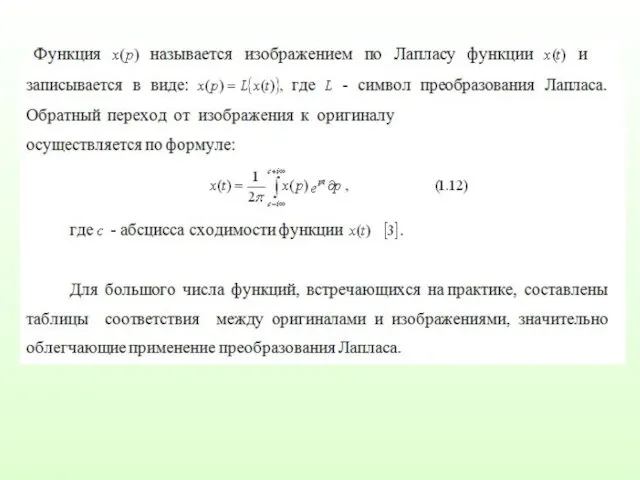
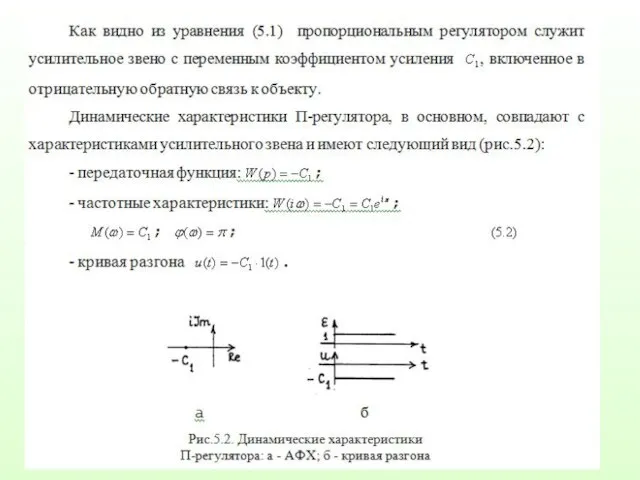
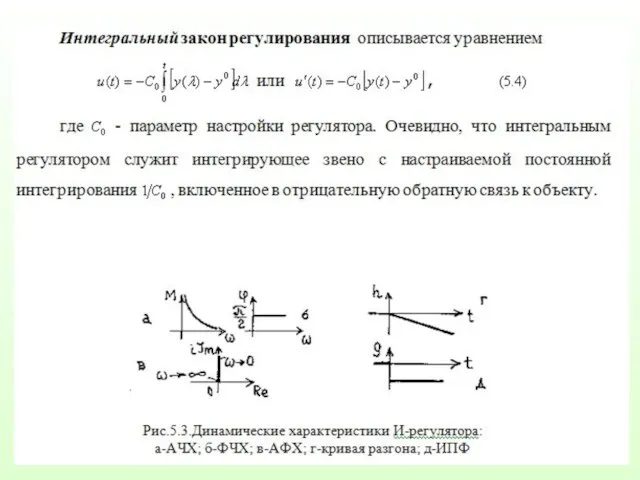
Слайд 2Развитие промышленной автоматики началось лишь с конца XVIII века в эпоху промышленного
переворота и было связано с появлением регуляторов И.И.Ползунова и Дж.Уатта. Общая же теория регуляторов была изложена в основном в 1868-1876г.г. в работах Максвелла и Вышнеградского. В этот же период был сформулирован алгебраический критерий устойчивости Рауса-Гурвица, а несколько позднее появились работы Стадолы, посвященные исследованию устойчивости ряда схем регулирования.
Большое значение для развития теории автоматического регулирования имели работы А.М.Ляпунова по устойчивости движения (1892), в которых впервые было дано точное определение устойчивости и обоснованы методы ее исследования.
Развитие и усложнение систем автоматики привело к созданию так называемых автоматизированных систем управления (АСУ).
Слайд 3В качестве основных отличительных черт АСУ можно отметить следующие:
1) Все АСУ содержат
как обязательное звено в своей структуре человека, которому отводится главная роль в системе.
2) Все АСУ строятся по иерархическому принципу и имеют многоуровневую структуру. Каждый из уровней имеет определенную независимость, число взаимосвязей между уровнями минимально, причем при отказе внешнего контура АСУ нижняя ступень продолжает функционировать.
3) Сложность задач, решаемых иерархической АСУ, при переходе к более высокой ступени иерархии возрастает, а качество их решения и требования по надежности снижаются.
Слайд 4Сферы применения автоматических систем управления и регулирования очень разнообразны как по физической
природе автоматизируемых объектов (различные технологические процессы, летательные аппараты, экономика и т.д.), так и по их сложности (начиная от простейшей системы регулирования уровня в баке до управления экономикой.
Однако принципы построения различных систем управления в значительной мере оказываются общими, независимо от того, рассматриваются ли системы управления технологическим процессом, ракетой или биологическим процессом. Эта общность принципов построения систем управления позволяет использовать при их исследовании и разработке одни и те же методы.
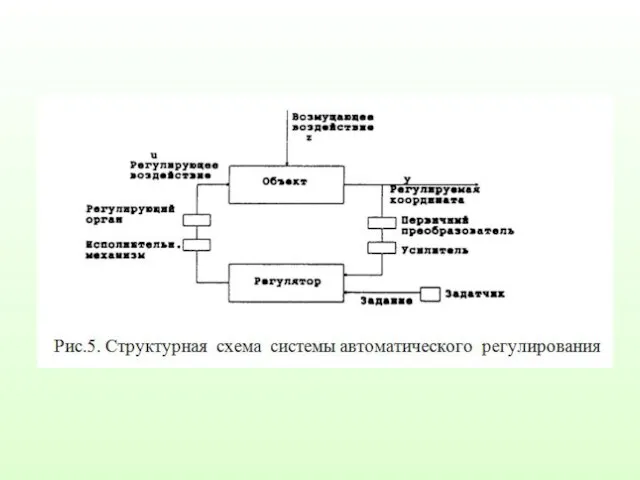
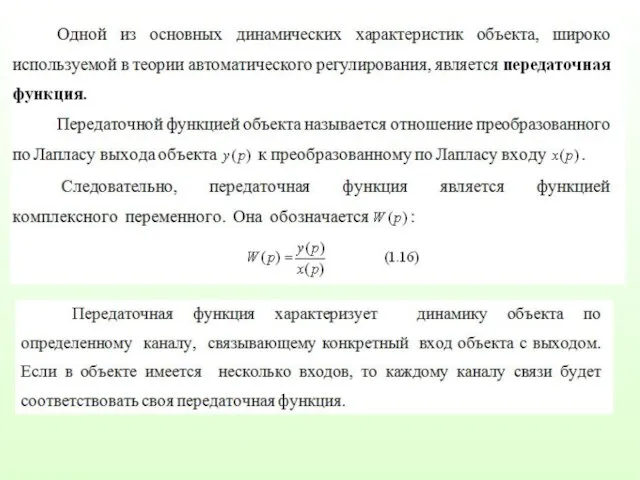
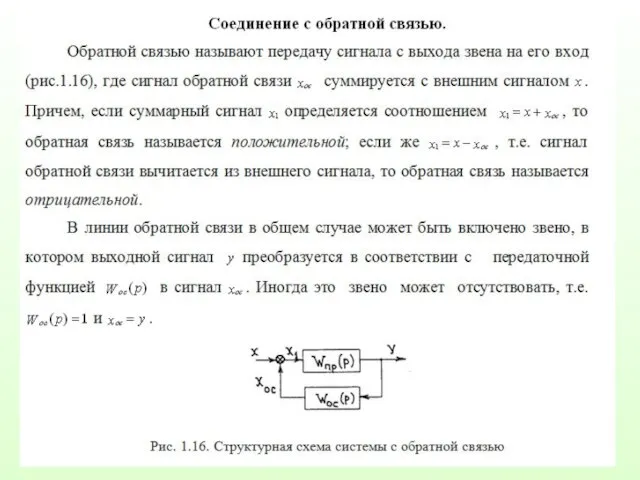
Слайд 5Структурной схемой (или блок-схемой) в автоматике называют такое условное изображение, в котором
отдельные элементы системы представляют прямоугольниками, а связи между элементами изображают стрелками, показывающими направление передачи сигналов информации.
Степень детализации структурной схемы для одной и той же системы может быть различной в зависимости от назначения схемы. Основными элементами системы автоматического регулирования являются объект и регулирующее устройство.
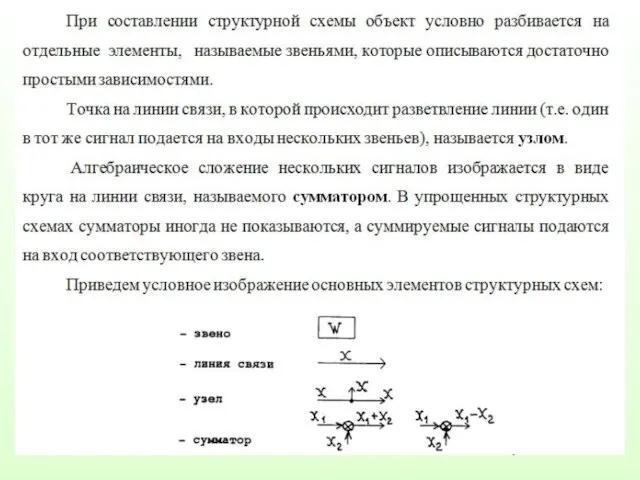
Слайд 6Первый промышленный регулятор был изобретен в 1765 году И.И.Ползуновым для созданной им
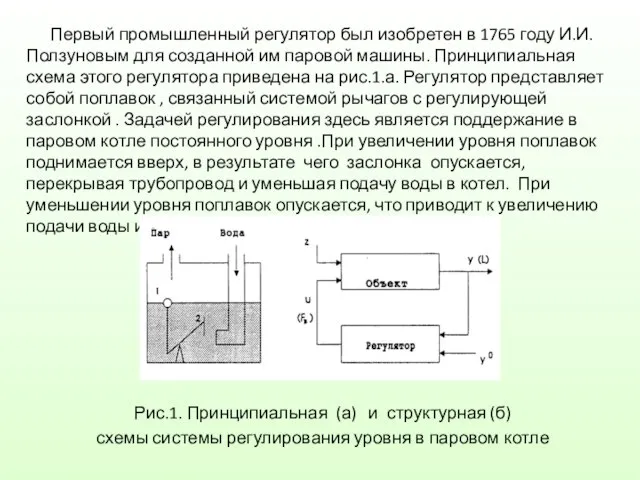
паровой машины. Принципиальная схема этого регулятора приведена на рис.1.а. Регулятор представляет собой поплавок , связанный системой рычагов с регулирующей заслонкой . Задачей регулирования здесь является поддержание в паровом котле постоянного уровня .При увеличении уровня поплавок поднимается вверх, в результате чего заслонка опускается, перекрывая трубопровод и уменьшая подачу воды в котел. При уменьшении уровня поплавок опускается, что приводит к увеличению подачи воды и, следовательно, к повышению уровня.
Рис.1. Принципиальная (а) и структурная (б)
схемы системы регулирования уровня в паровом котле
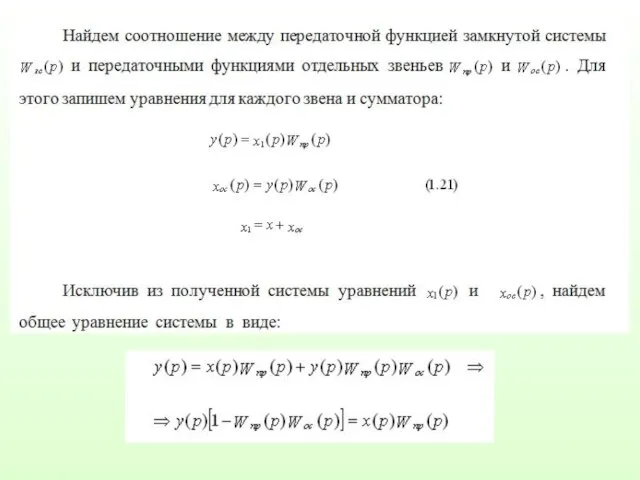
Слайд 7Первый промышленный регулятор был изобретен в 1765 году И.И.Ползуновым для созданной им
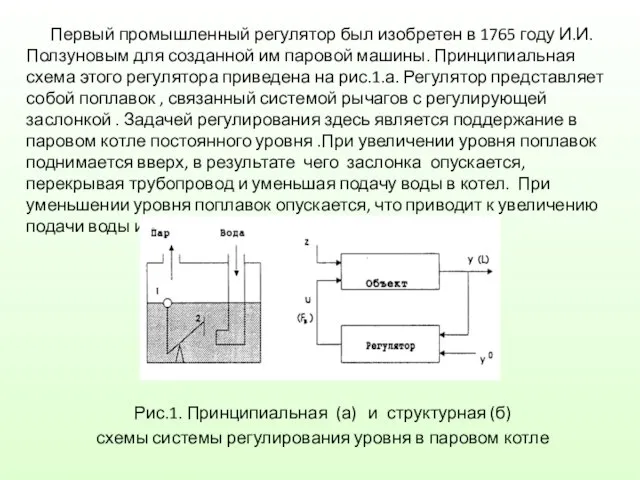
паровой машины. Принципиальная схема этого регулятора приведена на рис.1.а. Регулятор представляет собой поплавок , связанный системой рычагов с регулирующей заслонкой . Задачей регулирования здесь является поддержание в паровом котле постоянного уровня .При увеличении уровня поплавок поднимается вверх, в результате чего заслонка опускается, перекрывая трубопровод и уменьшая подачу воды в котел. При уменьшении уровня поплавок опускается, что приводит к увеличению подачи воды и, следовательно, к повышению уровня.
Рис.1. Принципиальная (а) и структурная (б)
схемы системы регулирования уровня в паровом котле
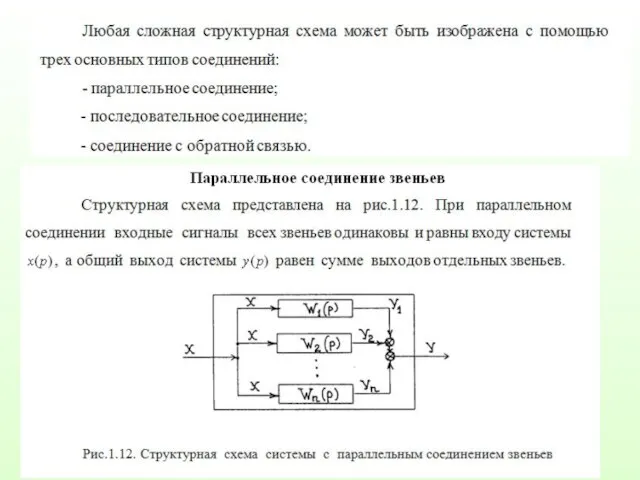
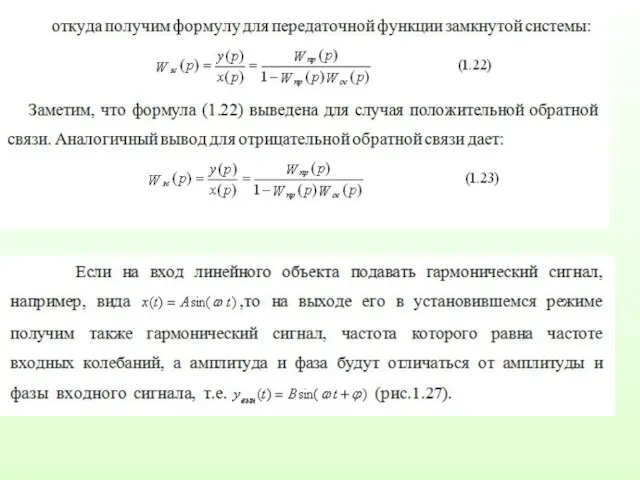
Слайд 8В 1784 году Джеймсом Уаттом был сконструирован центробежный регулятор числа оборотов вала
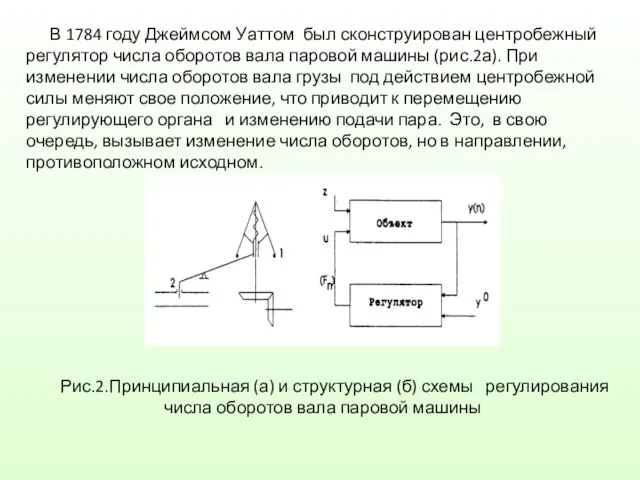
паровой машины (рис.2а). При изменении числа оборотов вала грузы под действием центробежной силы меняют свое положение, что приводит к перемещению регулирующего органа и изменению подачи пара. Это, в свою очередь, вызывает изменение числа оборотов, но в направлении, противоположном исходном.
Рис.2.Принципиальная (а) и структурная (б) схемы регулирования числа оборотов вала паровой машины
Слайд 9В рассмотренных примерах объектами регулирования являются паровой котел и паровая машина. К
регулирующим устройствам относятся соответственно поплавок и центробежная муфта с peгулирующими заслонками.
Регулируемые переменные и - выходные сигналы (или выходы) объекта, которые мы будем обозначать через y . Технологические параметры, от которых зависят выходные сигналы, называют входными сигналами (или входами) объекта. Среди входов различают возмущающие воздействия (или возмущения) z, которые вызывают отклонения регулируемой переменной от задания , и регулирующие воздействия u, служащие для поддержания регулируемой переменной на заданном значении. В данном случае регулирующие воздействия - подача воды в паровой котел и расход пара в паровую машину . К основным возмущениям можно отнести в одном случае - давление пара в котле, расход топлива и его теплотворную способность, в другом - нагрузку на валу паровой машины, давление пара в трубопроводе.
Слайд 10Необходимо отметить условность понятий "входных" и "выходных" сигналов, используемых в автоматике, и
их отличие от входных и выходных потоков в технологических процессах.
Общий принцип, по которому построены регуляторы Ползунова и Уатта, состоит в том, что регулятор изменяет регулирующее воздействие при отклонении регулируемой координаты от заданного значения независимо от причин, вызвавших это отклонение. При этом входной сигнал объекта оказывается зависимым от его выходного сигнала.
Такая связь между выходом и входом объекта называется обратной связью. Поэтому рассмотренный принцип регулирования и называется регулированием по обратной связи или регулированием по отклонению. Системы регулирования, построенные по этому принципу, являются замкнутыми системами .
Слайд 11При разработке теории центробежных регуляторов хода машин французским ученым Понселе был предложен
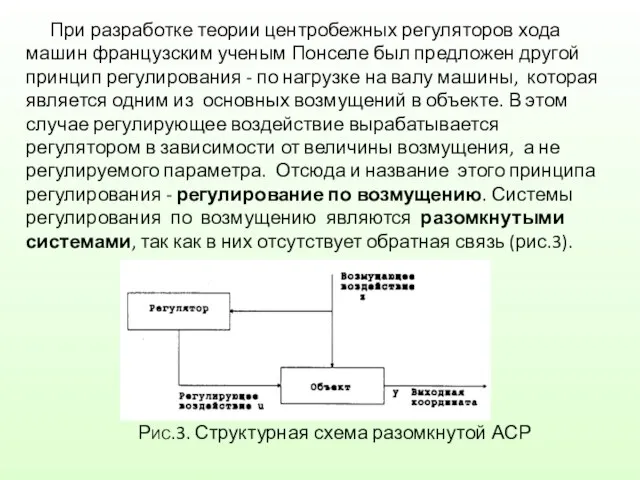
другой принцип регулирования - по нагрузке на валу машины, которая является одним из основных возмущений в объекте. В этом случае регулирующее воздействие вырабатывается регулятором в зависимости от величины возмущения, а не регулируемого параметра. Отсюда и название этого принципа регулирования - регулирование по возмущению. Системы регулирования по возмущению являются разомкнутыми системами, так как в них отсутствует обратная связь (рис.3).
Рис.3. Структурная схема разомкнутой АСР
Слайд 12Идея этого способа регулирования проста: если можно компенсировать всe возмущения, то регулируемая
величина не будет отклоняться от заданного значения. Недостаток систем, построенных по принципу компенсации возмущений, очевиден: практически в крайне редких случаях удается компенсировать все возможные возмущения в объекте. Наличие нестабилизируемых возмущений, таких как колебания атмосферных условий, старение катализатора, закоксовывание печей, отложение солей в теплообменниках и т.п., приводит к отклонению регулируемого параметра от заданного значения.
Системы регулирования, построенные по принципу обратной связи не имеют этого недостатка, так как в этом случае регулятор стремится компенсировать отклонение регулируемого параметра от задания независимо от того, какими причинами вызвано это отклонение. Однако при регулировании по отклонению трудно одновременно выполнить условия точности, устойчивости и быстродействия систем. Так повышение точности и быстродействия часто приводит к тому, что система оказывается неработоспособной в силу неустойчивости.
Слайд 13Наиболее эффективными системами регулирования, получившими значительное распространение в технике, являются комбинированные системы

автоматического регулирования, сочетающие оба рассмотренных принципа (рис.4).
Рис. 4. Структурная схема комбинированной АСР
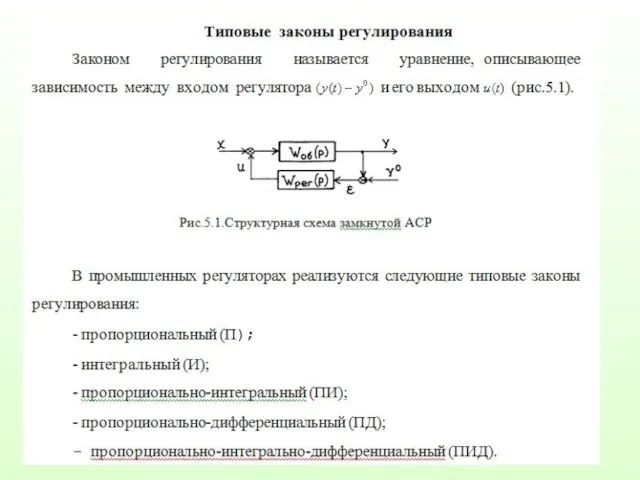
Слайд 14
В зависимости от способа формирования сигнала задания различают три типа систем регулирования:
системы
стабилизации, в которых заданное значение регулируемой координаты постоянно;
системы программного регулирования, в которых задание регулятору изменяется во времени по заранее заданной программе;
следящие системы, в которых задание регулятору изменяется в зависимости от какого-либо другого технологического параметра, т.е. регулируемая переменная "следит" за изменением этого параметра.
Слайд 15Помимо собственно объекта и регулятора в автоматических системах регулирования обычно можно выделить
следующие составные элементы:
чувствительный элемент, называемый первичным преобразователем, служащий для измерения текущего значения регулируемого параметра и выдачи соответствующего сигнала (например, термоэлектрические преобразователи для измерения температуры, сужающие устройства расходомеров, поплавки или буйки в измерителях уровня и т.п.);
усилительно-преобразовательное устройство, предназначенное для преобразования одного вида энергии в другой и для усиления сигнала по мощности, необходимое для его передачи на расстояние;
- задающее устройство, в котором формируется сигнал, соответствующий заданному значению регулируемой координаты;
- исполнительный механизм, выполняющий роль преобразователя командного сигнала регулятора в перемещение регулирующего органа, положение которого определяет значение регулирующего воздействия.
Слайд 17На рис. 6 показана принципиальная схема регулирования температуры в химическом реакторе за
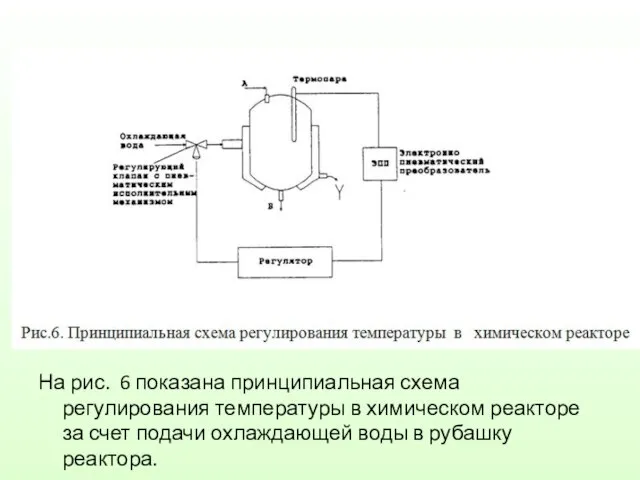
счет подачи охлаждающей воды в рубашку реактора.
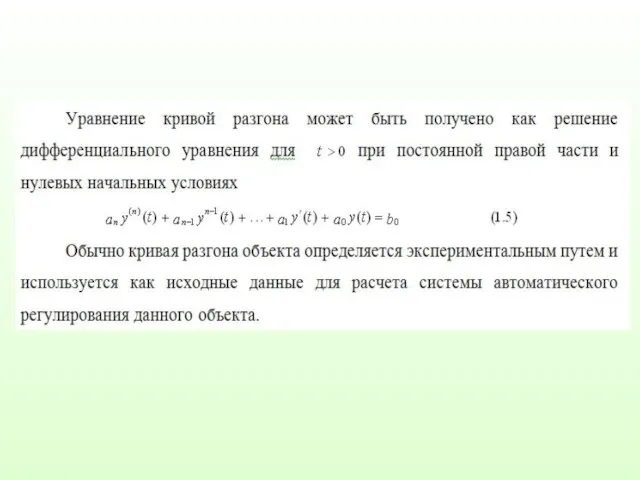
Слайд 18Построение любой системы управления начинается с изучения объекта управления и составления его
математического описания. Математическое описание объекта регулирования может быть получено экспериментальным, аналитическим или комбинированным, т.е. экспериментально-аналитическим методом. В первом случае уравнения объекта получают либо путем постановки специального эксперимента на объекте с последующей обработкой результатов эксперимента (метод активного эксперимента), либо статистической обработкой результатов длительной регистрации входных и выходных координат объекта в условиях его нормальной эксплуатации (метод пассивного эксперимента).
При аналитическом описании уравнения объекта получают на основе анализа физико-химических закономерностей протекающих в нем процессов. Экспериментально - аналитический путь получения математического описания объектов подразумевает составление уравнений аналитическим методом с последующим определением коэффициентов этих уравнений экспериментальным путем.
Слайд 19Уравнения статики описывают установившийся режим, при котором все координаты объекта остаются неизменными
во времени, т.е. объект находится в состоянии равновесия. Уравнения статики представляют собой алгебраические (трансцендентные) уравнения или дифференциальные уравнения, содержащие производные по какому-либо параметру, кроме времени (например, по пространственной координате).
Уравнения динамики описывают неустановившийся, или переходный режим, в котором выходная координата объекта изменяется во времени. В общем случае уравнения динамики являются дифференциальными уравнениями, содержащими производные по времени.
Слайд 20В зависимости от конкретного вида уравнений математического описания все объекты регулирования подразделяются
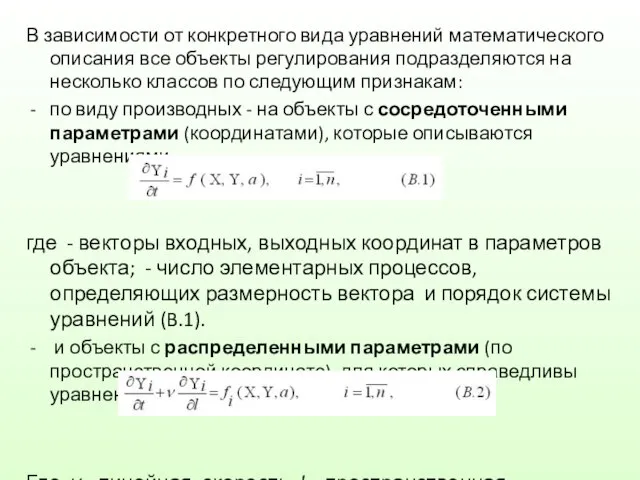
на несколько классов по следующим признакам:
по виду производных - на объекты с сосредоточенными параметрами (координатами), которые описываются уравнениями
где - векторы входных, выходных координат в параметров объекта; - число элементарных процессов, определяющих размерность вектора и порядок системы уравнений (B.1).
и объекты с распределенными параметрами (по пространственной координате), для которых справедливы уравнения в частных производных (В.2);
Где ν - линейная скорость; l – пространственная переменная.
Слайд 21по типу функций в правой части уравнений - на линейные и нелинейные
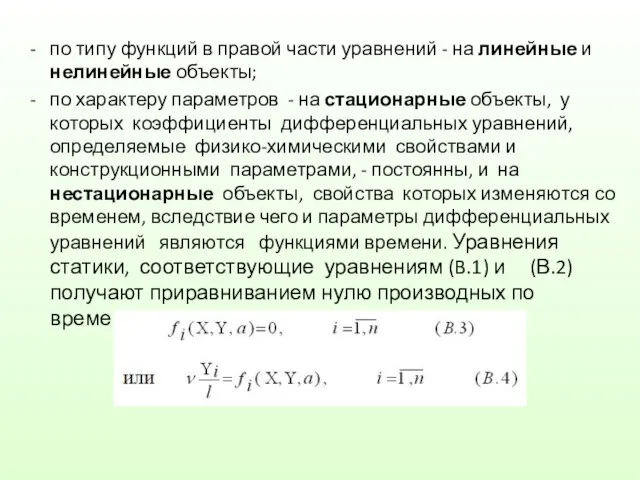
объекты;
по характеру параметров - на стационарные объекты, у которых коэффициенты дифференциальных уравнений, определяемые физико-химическими свойствами и конструкционными параметрами, - постоянны, и на нестационарные объекты, свойства которых изменяются со временем, вследствие чего и параметры дифференциальных уравнений являются функциями времени. Уравнения статики, соответствующие уравнениям (B.1) и (В.2) получают приравниванием нулю производных по времени:
Слайд 22Характер производных в дифференциальных уравнениях объекта и порядок системы уравнений в значительной
мере определяют сложность объекта управления, которая не всегда совпадает с его конструктивной сложностью. Эти особенности математической модели объекта однозначно связаны с его числом степеней свободы, которое равно наименьшему числу независимых переменных, однозначно определяющих состояние объекта в каждый момент времени.
Так, для того, чтобы задать положение точки в пространстве, необходимо знать три ее координаты (система обладает тремя степенями свободы); для задания положения точки на плоскости достаточно значений двух координат (система имеет две степени свободы).
Слайд 23Процесс, происходящий в химическом реакторе, может быть охарактеризован давлением, температурой и концентрацией
продуктов в нем. Однако, если значения некоторых из этих параметров однозначно определяются величинами других, то не все параметры являются необходимыми для характеристики состояния объекта. Так, если процесс в реакторе полностью характеризуется давлением в нем (или только температурой, или только концентрацией) и оно одинаково во всех точках аппарата, то такой реактор является объектом с одной степенью свободы и описывается обыкновенным дифференциальным уравнением первого порядка.
Таким образом, объекты с сосредоточенными параметрами имеют конечное число степеней свободы, определяющее порядок дифференциального уравнения. Объекты с распределенными параметрами имеют бесконечное число степеней свободы. Например, для характеристики состояния трубчатого реактора в каждый момент времени требуется задать его температуру (и концентрацию) в каждом сечении аппарата, т.е.задать функции
Слайд 24Коэффициенты дифференциальных уравнений объектов управления (вектор а) в общем случае представляют собой
комплексы, в которые могут входить физико-химические константы, конструкционные и режимные параметры. Для объектов, свойства которых не изменяются во времени (стационарные объекты), коэффициенты уравнений будут константами. Для нестационарных объектов, свойства которых изменяются со временем (например, вследствие старения падает активность катализатора или уменьшается коэффициент теплопередачи из-за образования накипи на теплообменных поверхностях), коэффициенты дифференциальных уравнений оказываются переменными, зависящими от времени.
Большинство технологических объектов являются нестационарными, однако скорость изменения их свойств намного меньше, чем скорость процессов регулирования этих объектов. Так, например, время регулирования температуры в реакторе может составлять несколько минут, а время одного цикла работы катализатора - несколько месяцев. Такие объекты можно приближенно рассматривать как стационарные в течение определенного промежутка времени (называемого периодом квазистационарности), за который свойства объекта не успевают существенно измениться.
Слайд 25Статические характеристики объектов отражают связь между входными и выходными координатами в установившихся
режимах. Для объектов с несколькими входами и выходами эти характеристики представляют собой многомерные поверхности в пространстве описываемые уравнениями статики объекта. В пpocтейшем случае для объекта с одним входом , одним выходом статической характеристикой является функция в общем случае нелинейная.
Основным показателем статической характеристики объекта с сосредоточенными параметрами является коэффициент усиления который равен производной от функции, описывающей статическую характеристику.
Очевидно, что для объектов с нелинейными характеристиками коэффициент усиления зависит от входной координаты, т.е. является переменной величиной (рис.5).
Слайд 26
а б
Рис.5. Статические характеристики нелинейных (а) и линейных (б) объектов

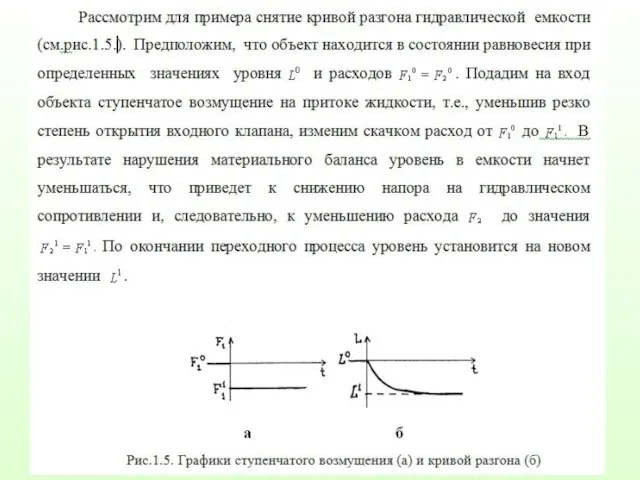
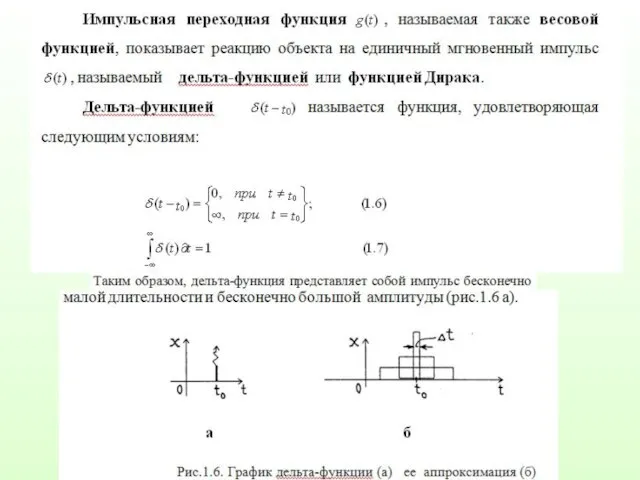
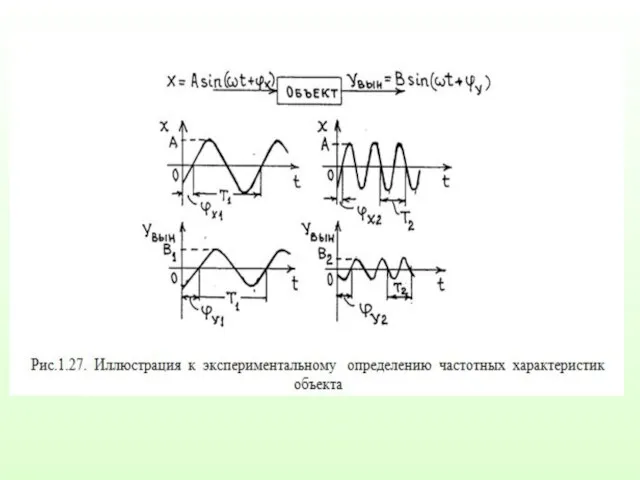
Слайд 27Для характеристики динамических свойств линейных объектов широко используются переходные процессы, соответствующие типовым
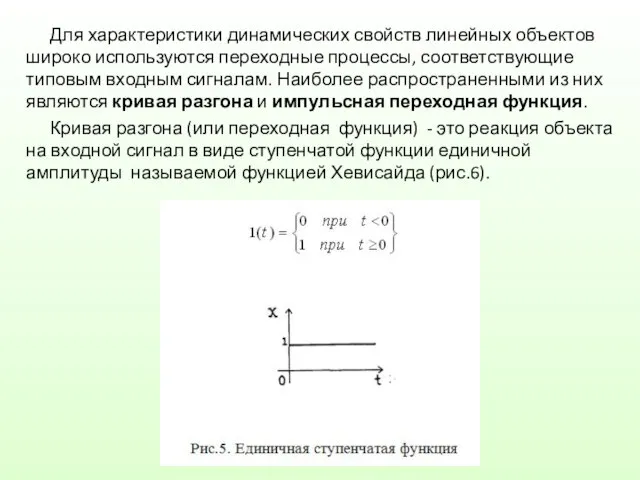
входным сигналам. Наиболее распространенными из них являются кривая разгона и импульсная переходная функция.
Кривая разгона (или переходная функция) - это реакция объекта на входной сигнал в виде ступенчатой функции единичной амплитуды называемой функцией Хевисайда (рис.6).
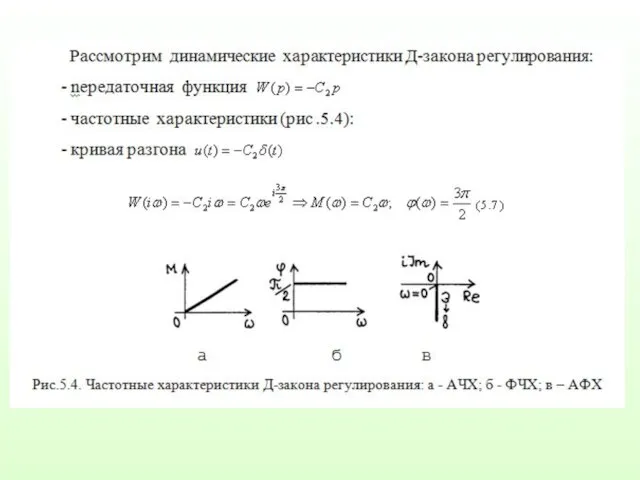
Слайд 69АВТОМАТИЗАЦИЯ ТИПОВЫХ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ
Общая задача управления технологическим процессом формулируется обычно как задача
максимизации (минимизации) некоторого критерия (себестоимости, энергозатрат, прибыли) при выполнении ограничений на технологические параметры, накладываемых регламентом. Решение такой задачи для всего процесса в целом очень трудоемко, а иногда практически невозможно ввиду большого числа факторов, влияющих на ход процесса. Поэтому весь процесс разбивают на отдельные участки, которые характеризуются сравнительно небольшим числом переменных. Обычно эти участки совпадают с законченными технологическими стадиями, для которых могут быть сформулированы свои подзадачи управления, подчиненные общей задаче управления процессом в целом.
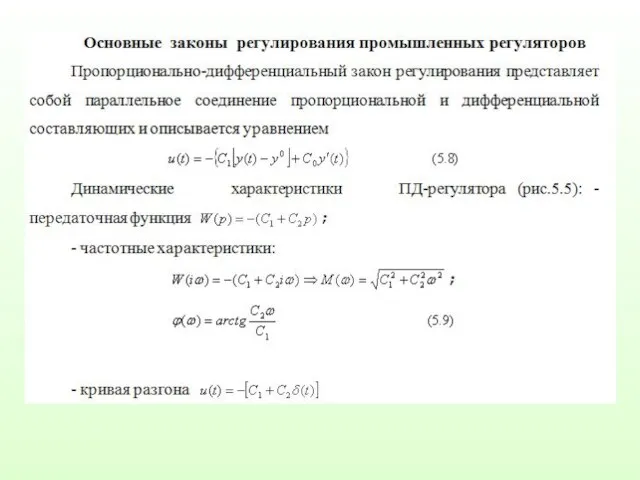
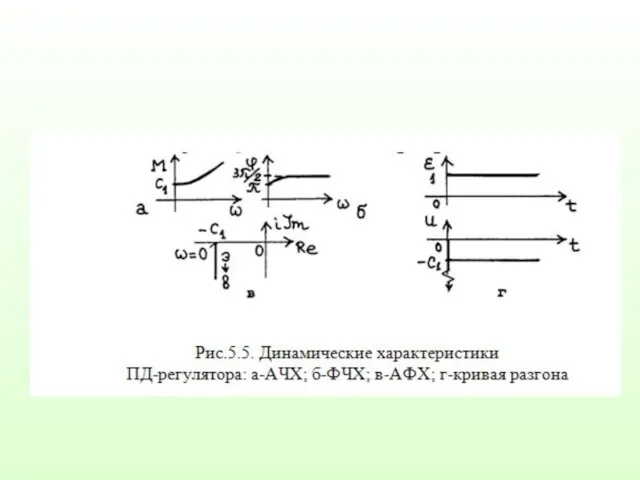
Слайд 70Задачи управления отдельными стадиями обычно направлены на оптимизацию (в частном случае, стабилизацию)
технологического параметра или критерия, легко вычисляемого по измеренным режимным параметрам (производительность, концентрация продукта, степень превращения, расход энергии). Оптимизацию критерия проводят в рамках ограничений, задаваемых технологическим регламентом. На основании задачи оптимального управления отдельными стадиями процесса формулируют задачи автоматического регулирования технологических параметров для отдельных аппаратов.
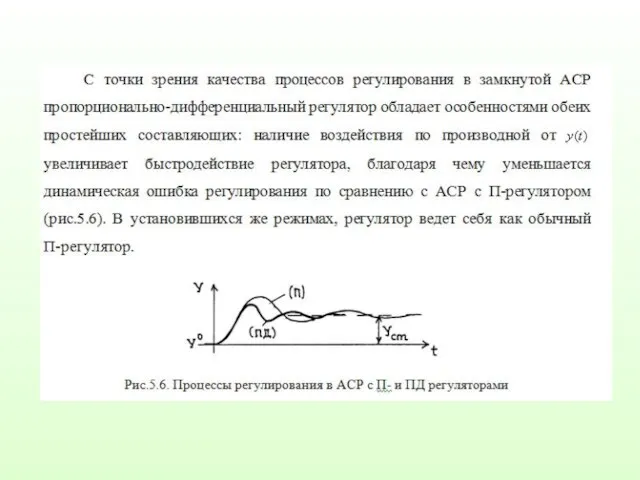
Слайд 71Важным этапом в разработке системы автоматизации является анализ основных аппаратов как объектов
регулирования, т. е. выявление всех существенных входных и выходных переменных и анализ статических и динамических характеристик каналов возмущения и регулирования.
Исходными данными при этом служат математическая модель процесса и (как первое приближение) статическая модель в виде уравнений материального и теплового балансов. На основе этих уравнений с учетом реальных условий работы аппарата все существенные факторы, влияющие на процесс, разбиваются на следующие группы.
Слайд 72Возмущения, допускающие стабилизацию. К ним относят независимые технологические параметры, которые могут испытывать
существенные колебания, однако по условиям работы могут быть стабилизированы с помощью автоматической системы регулирования. К таким параметрам обычно относятся некоторые показатели входных потоков. Так, расход питания можно стабилизировать, если перед аппаратом имеется буферная емкость, сглаживающая колебания расхода на выходе из предыдущего аппарата; стабилизация температуры питания возможна, если перед аппаратом установлен теплообменник, и т. п.
Очевидно, при проектировании системы управления целесообразно предусмотреть автоматическую стабилизацию таких возмущений. Это позволит повысить качество управления процессом в целом. В простейших случаях на основе таких систем автоматической стабилизации возмущений строят разомкнутую (относительно основного показателя процесса) систему автоматизации, обеспечивающую устойчивое ведение процесса в рамках технологического регламента.
Слайд 73Контролируемые возмущения. К ним условно относят те возмущения, которые можно измерить, но
невозможно или недопустимо стабилизировать (расход питания, подаваемого непосредственно из предыдущего аппарата; температура окружающей среды и т. п.).
Наличие существенных нестабилизируемых возмущений требует применения либо замкнутых по основному показателю процесса систем регулирования, либо комбинированных АСР, в которых качество регулирования повышается введением динамической компенсации возмущения.
Слайд 74Неконтролируемые возмущения. К ним относятся те возмущения, которые невозможно или нецелесообразно измерять
непосредственно. Первые — это падение активности катализатора, изменение коэффициентов тепло- и массопередачи и т. п. Примером вторых может служить давление греющего пара в заводской сети, которое колеблется случайным образом и является источником возмущения в тепловых процессах. Выявление возможных неконтролируемых возмущений — важный этап в исследовании процесса и разработке системы управления. Наличие таких возмущений требует, как и в предыдущем случае, обязательного применения замкнутых по основному показателю процесса систем автоматизации.
Возможные регулирующие воздействия. Это материальные или тепловые потоки, которые можно изменять автоматически для поддержания регулируемых параметров.
Слайд 75Выходные переменные. Из их числа выбирают регулируемые координаты. При построении замкнутых систем
регулирования в качестве регулируемых координат выбирают технологические параметры, изменение которых свидетельствует о нарушении материального или теплового баланса в аппарате. К ним относятся: уровень жидкости — показатель баланса по жидкой фазе; давление — показатель баланса по газовой фазе; температура — показатель теплового баланса в аппарате; концентрация — показатель материального баланса по компоненту.
На основе анализа технологического процесса как объекта регулирования проектируют систему автоматизации, обеспечивающую решение поставленной задачи регулирования. Начинают с проектирования одноконтурных АСР отдельных параметров: они наиболее просты в наладке и надежны в работе, поэтому широко используются при автоматизации технологических объектов.
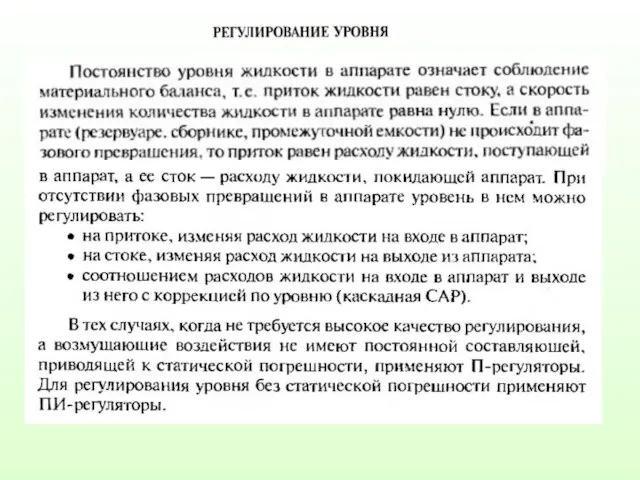
Слайд 76РЕГУЛИРОВАНИЕ ОСНОВНЫХ ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ
К основным технологическим параметрам, подлежащим контролю и регулированию в
химико-технологических процессах, относят расход, уровень, давление, температуру, значение рН и показатели качества (концентрацию, плотность, вязкость и др.).
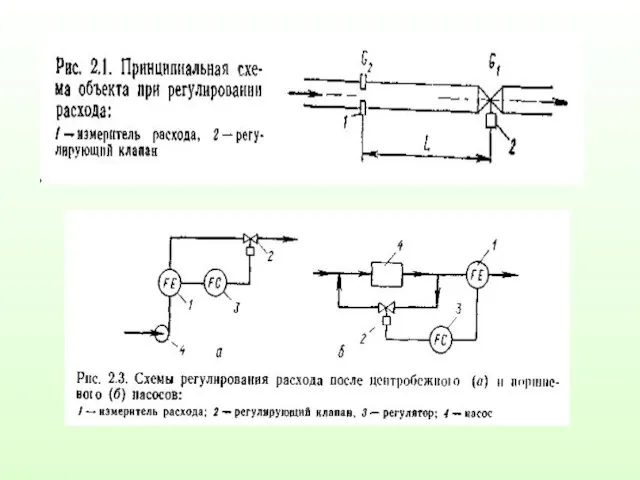
Регулирование расхода. Необходимость регулирования расхода возникает при автоматизации практически любого непрерывного процесса. АСР расхода, предназначенные для стабилизации возмущений по материальным потокам, являются неотъемлемой частью разомкнутых систем автоматизации технологических процессов. Часто АСР расхода используют как внутренние контуры в каскадных системах регулирования других параметров. Для обеспечения заданного состава смеси или для поддержания материального и теплового балансов в аппарате применяют системы регулирования соотношения расходов нескольких веществ в одноконтурных или каскадных АСР.
Слайд 78В системах регулирования расхода применяют один из трех способов изменения расхода:
дросселирование потока
вещества через регулирующий орган, устанавливаемый на трубопроводе (клапан, шибер, заслонка);
изменение напора в трубопроводе с помощью регулируемого источника энергии (например, изменением числа оборотов двигателя насоса или угла поворота лопастей вентилятора);
байпасирование, т. е. переброс избытка вещества из основного трубопровода в обводную линию.
Регулирование расхода после центробежного насоса осуществляется регулирующим клапаном, устанавливаемым на нагнетательном трубопроводе (рис. 2.3,а). Если для перекачивания жидкости используют поршневой насос, применение подобной АСР недопустимо, так как при работе регулятора клапан может закрыться полностью, что приведет к разрыву трубопровода (или к помпажу, если клапан установлен на входе насоса). В этом случае для регулирования расхода используют байпасирование потока (рис. 2.3,6).








 30
30 Что у нас под ногами? 1 класс
Что у нас под ногами? 1 класс Методика внедренияАИБС Marc SQLна примере Фундаментальной библиотеки МГПУ
Методика внедренияАИБС Marc SQLна примере Фундаментальной библиотеки МГПУ ТЕХНОПАРК «РОДНИКИ»
ТЕХНОПАРК «РОДНИКИ» Счастье наше и счастье наших детей
Счастье наше и счастье наших детей Презентация на тему Архитектура западноевропейского Средневековья Секреты готического мастерства
Презентация на тему Архитектура западноевропейского Средневековья Секреты готического мастерства  Владимир Высоцкий. Своя колея
Владимир Высоцкий. Своя колея Чековые промо в банках: кейсы Sибирской коллекции, Stada и СберСпасибо
Чековые промо в банках: кейсы Sибирской коллекции, Stada и СберСпасибо Китайский массаж гуаша для здоровья и красоты!
Китайский массаж гуаша для здоровья и красоты! МПСУвЭПиТК. Практические вопросы
МПСУвЭПиТК. Практические вопросы Emerson ACTURA – решение электропитания систем HP Blade Server
Emerson ACTURA – решение электропитания систем HP Blade Server История космических побед. - презентация
История космических побед. - презентация Уголовный процесс. Процесс доказывания: понятие, этапы и элементы
Уголовный процесс. Процесс доказывания: понятие, этапы и элементы Натюрморт в графике. ИЗО. 6 класс
Натюрморт в графике. ИЗО. 6 класс БИОЛОГИЯ 24.10
БИОЛОГИЯ 24.10 Схема основных бизнес-процессов в производстве.
Схема основных бизнес-процессов в производстве. Неисправности стрелочных переводов на железной дороге при которых запрещена их эксплуатация в пути
Неисправности стрелочных переводов на железной дороге при которых запрещена их эксплуатация в пути Сертификаты учета
Сертификаты учета Энергоаудит
Энергоаудит Лёгкая aтлетика
Лёгкая aтлетика О, благодать. Спасен тобой я из пучины бед
О, благодать. Спасен тобой я из пучины бед НОВАЯ ВОЛНА
НОВАЯ ВОЛНА Тайная вечеря
Тайная вечеря Исследования типа взаимосвязь X и Y
Исследования типа взаимосвязь X и Y Сталинская реконструкция Москвы 1935
Сталинская реконструкция Москвы 1935 Введение в курс истории древнего мира
Введение в курс истории древнего мира New York City
New York City  Правила поведения у водоёмов
Правила поведения у водоёмов