- Обработка радиолокационной информации в автономных мобильных наземных объектах

Содержание
- 2. На этапе первичной обработки происходит обнаружение отдельных сигналов и определение их характеристик, а также погрешностей. На
- 3. Цели и задачи НИР Целью работы является создание ПО блока вторичной обработки, применимого в реальной обстановке.
- 4. Применение радиолокационного датчика обнаружение и определение параметров относительного движения множества подвижных и неподвижных объектов информационное обеспечение
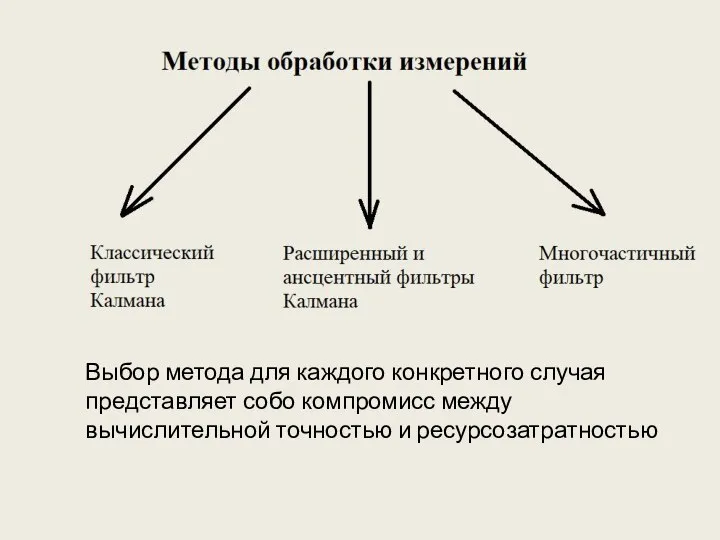
- 5. Выбор метода для каждого конкретного случая представляет собо компромисс между вычислительной точностью и ресурсозатратностью
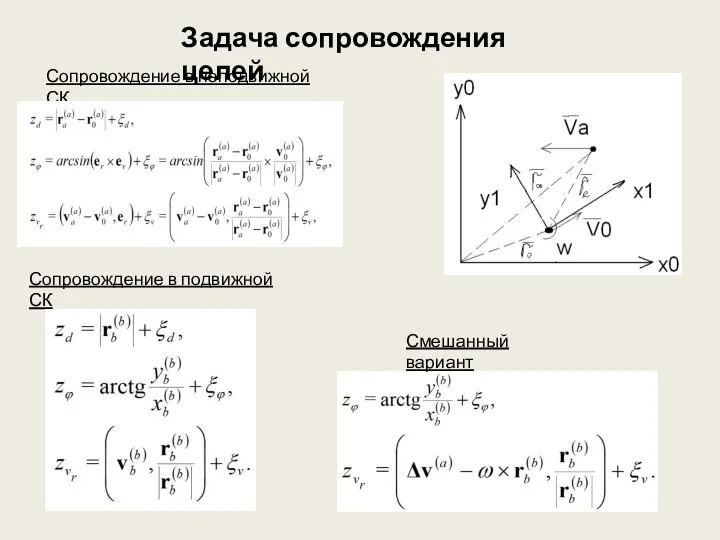
- 6. Сопровождение в неподвижной СК Сопровождение в подвижной СК Смешанный вариант Задача сопровождения целей
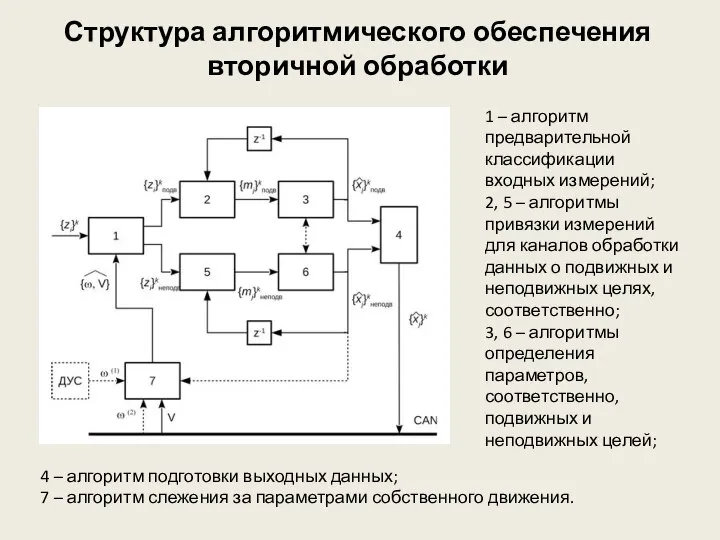
- 7. Структура алгоритмического обеспечения вторичной обработки 1 – алгоритм предварительной классификации входных измерений; 2, 5 – алгоритмы
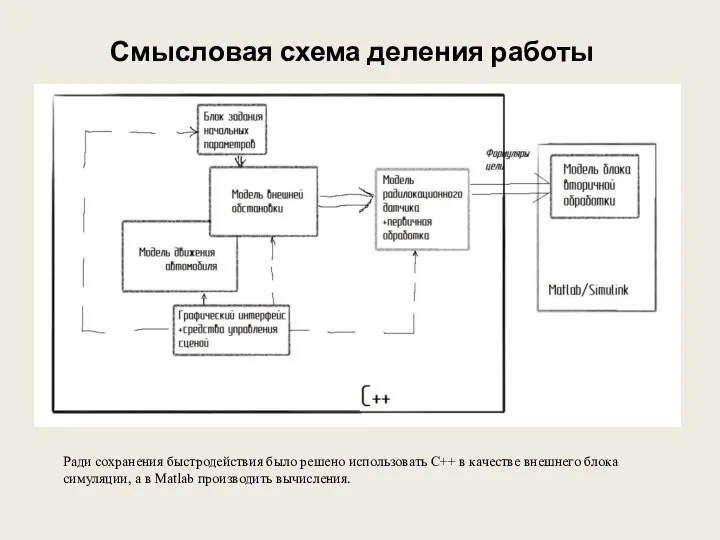
- 8. Смысловая схема деления работы Ради сохранения быстродействия было решено использовать С++ в качестве внешнего блока симуляции,
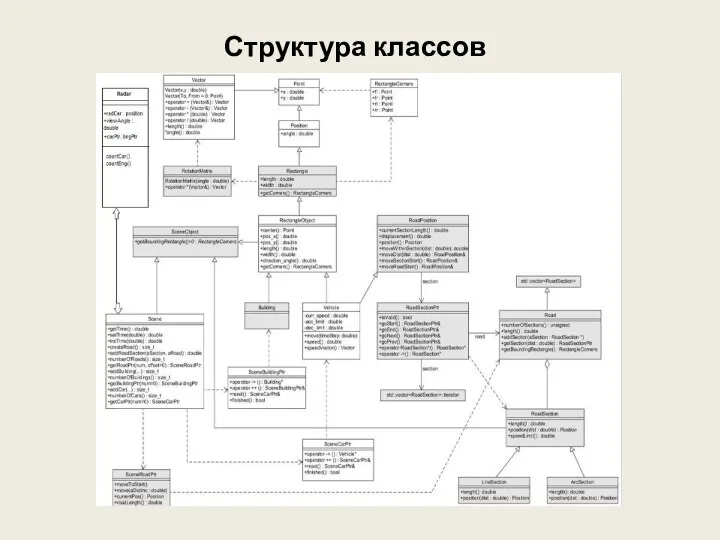
- 9. Структура классов
- 11. Скачать презентацию
Слайд 2На этапе первичной обработки происходит обнаружение отдельных сигналов и определение их характеристик,
На этапе первичной обработки происходит обнаружение отдельных сигналов и определение их характеристик,
Слайд 3Цели и задачи НИР
Целью работы является создание ПО блока вторичной обработки, применимого
Цели и задачи НИР
Целью работы является создание ПО блока вторичной обработки, применимого
Слайд 4Применение радиолокационного датчика
обнаружение и определение параметров относительного движения множества подвижных и неподвижных
Применение радиолокационного датчика
обнаружение и определение параметров относительного движения множества подвижных и неподвижных

Слайд 5Выбор метода для каждого конкретного случая представляет собо компромисс между вычислительной точностью
Выбор метода для каждого конкретного случая представляет собо компромисс между вычислительной точностью
Слайд 6Сопровождение в неподвижной СК
Сопровождение в подвижной СК
Смешанный вариант
Задача сопровождения целей
Сопровождение в неподвижной СК
Сопровождение в подвижной СК
Смешанный вариант
Задача сопровождения целей
Слайд 7Структура алгоритмического обеспечения вторичной обработки
1 – алгоритм предварительной классификации входных измерений;
2, 5
Структура алгоритмического обеспечения вторичной обработки
1 – алгоритм предварительной классификации входных измерений;
2, 5
Слайд 8Смысловая схема деления работы
Ради сохранения быстродействия было решено использовать С++ в качестве
Смысловая схема деления работы
Ради сохранения быстродействия было решено использовать С++ в качестве
Слайд 9 Структура классов
Структура классов
 ТРАНСПОРТНОЕ ОБРАЗОВАНИЕ И НАУКУ НА СЛУЖБУ ТРАНСПОРТУ
ТРАНСПОРТНОЕ ОБРАЗОВАНИЕ И НАУКУ НА СЛУЖБУ ТРАНСПОРТУ Жестокое обращение с ребенком
Жестокое обращение с ребенком Семейство тяжелых рядных дизельных двигателей ЯМЗ-650 Общее описание конструкции Основные элементы систем и механизмов двигате
Семейство тяжелых рядных дизельных двигателей ЯМЗ-650 Общее описание конструкции Основные элементы систем и механизмов двигате МАРКЕТИНГ В Е. - презентация
МАРКЕТИНГ В Е. - презентация Банковские карты
Банковские карты Элективный курс «Удивительная линейка»
Элективный курс «Удивительная линейка» Добро пожаловать в команду МИРАТОРГ
Добро пожаловать в команду МИРАТОРГ Кодирование и обработка графической и мультимедийной информации
Кодирование и обработка графической и мультимедийной информации Порядок присвоения квалификационных разрядов работникам дистанции пути
Порядок присвоения квалификационных разрядов работникам дистанции пути Использование метода проектов на уроках информатики для развития творческой личности учащихся
Использование метода проектов на уроках информатики для развития творческой личности учащихся Проблемы загрязнения воды
Проблемы загрязнения воды Искусство северного возрождения. А. ДЮРЕР
Искусство северного возрождения. А. ДЮРЕР Снятие мерок с фигуры человека
Снятие мерок с фигуры человека Своя игра Татьянин день
Своя игра Татьянин день Налоговые и неналоговые доходы местных бюджетов и пути укрепления их доходной базы
Налоговые и неналоговые доходы местных бюджетов и пути укрепления их доходной базы Скелет человека. Осевой скелет
Скелет человека. Осевой скелет Зачем изучать логарифмы
Зачем изучать логарифмы 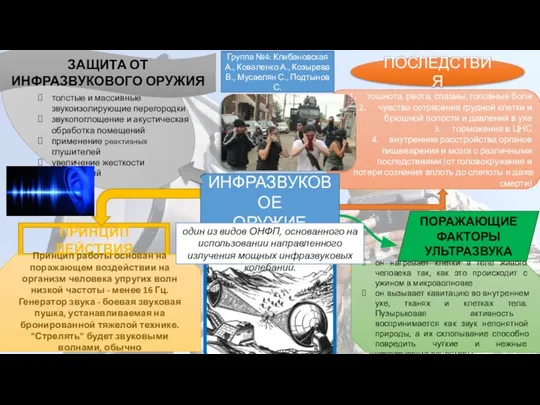 Защита от инфразвукового оружия
Защита от инфразвукового оружия Производство брикетного топлива
Производство брикетного топлива Методические рекомендации к составлению основной общеобразовательной программы ДОУ компенсирующего вида
Методические рекомендации к составлению основной общеобразовательной программы ДОУ компенсирующего вида Сложные условия на Паскале
Сложные условия на Паскале Наш общий дом - Природа!
Наш общий дом - Природа! Деревья
Деревья Презентация на тему Интерференция света
Презентация на тему Интерференция света Memoreon. Идея проекта
Memoreon. Идея проекта «Где рождаются законы»
«Где рождаются законы» Как сделать слайд-презентацию эффективной
Как сделать слайд-презентацию эффективной Алкоголь
Алкоголь