- Оптико-электронный измеритель микроперемещений??-?????????

Содержание
- 2. Содержание目录 Общие сведения总则 Состав макета измерителя 测量仪样机的各个组成部分 Устройство и принцип работы结构和工作原理 Особенности работы 工作特点 Программа параметризации参数软件
- 3. Общие сведения总则 Оптико-электронный измеритель микроперемещений предназначен для бесконтактного измерения размеров, перемещения, положения, профиля поверхности изделий и
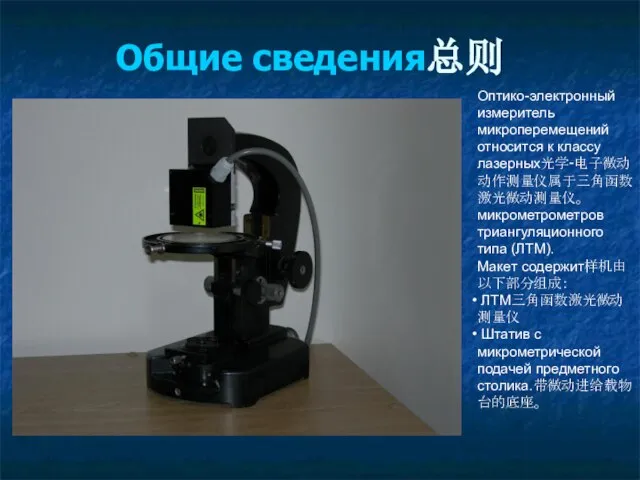
- 4. Общие сведения总则 Оптико-электронный измеритель микроперемещений относится к классу лазерных光学-电子微动动作测量仪属于三角函数激光微动测量仪。микрометрометров триангуляционного типа (ЛТМ). Макет содержит样机由以下部分组成: ЛТМ三角函数激光微动测量仪 Штатив
- 5. Состав макета измерителя测量仪样机的各个组成部分 ЛТМ включает в себя:三角函数激光微动测量仪包括: полупроводниковый лазер мощностью 5 мВт с длиной волны излучения
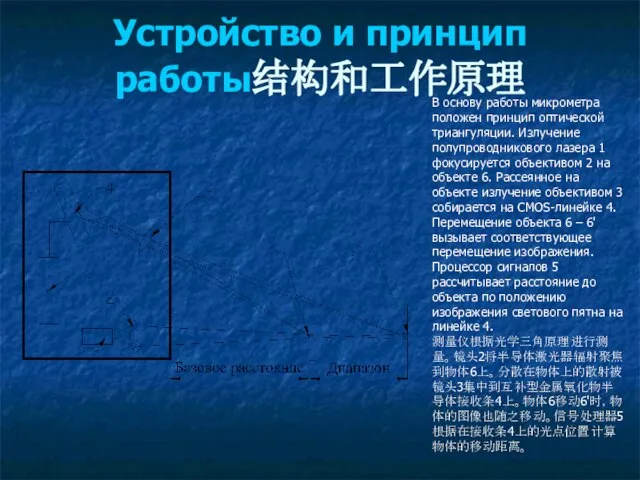
- 6. Устройство и принцип работы结构和工作原理 В основу работы микрометра положен принцип оптической триангуляции. Излучение полупроводникового лазера 1
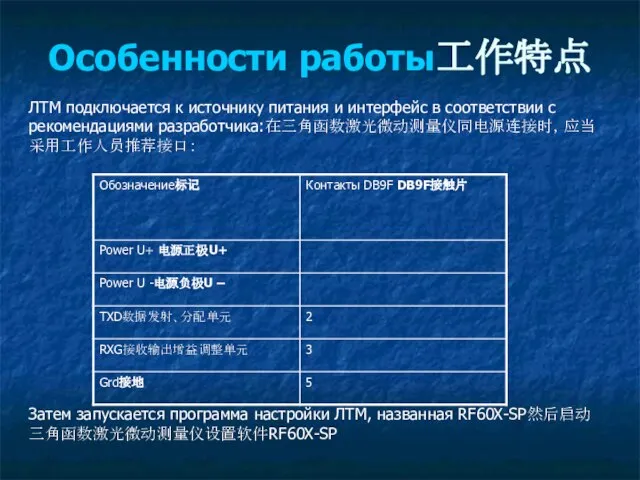
- 7. Особенности работы工作特点 ЛТМ подключается к источнику питания и интерфейс в соответствии с рекомендациями разработчика:在三角函数激光微动测量仪同电源连接时,应当采用工作人员推荐接口: Затем запускается
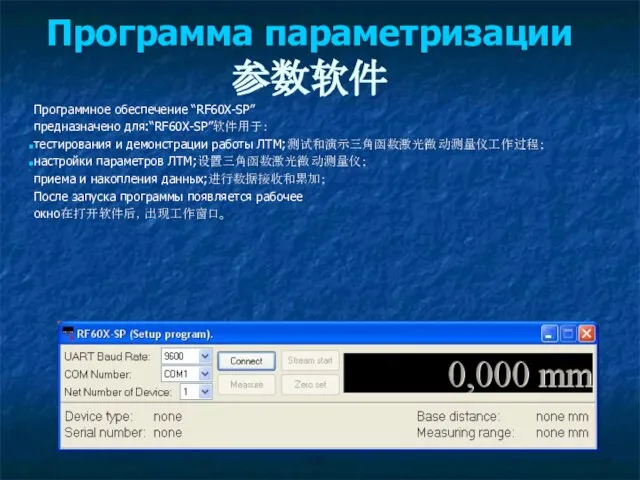
- 8. Программа параметризации参数软件 Программное обеспечение “RF60Х-SP” предназначено для:“RF60Х-SP”软件用于: тестирования и демонстрации работы ЛТМ;测试和演示三角函数激光微动测量仪工作过程; настройки параметров ЛТМ;设置三角函数激光微动测量仪; приема
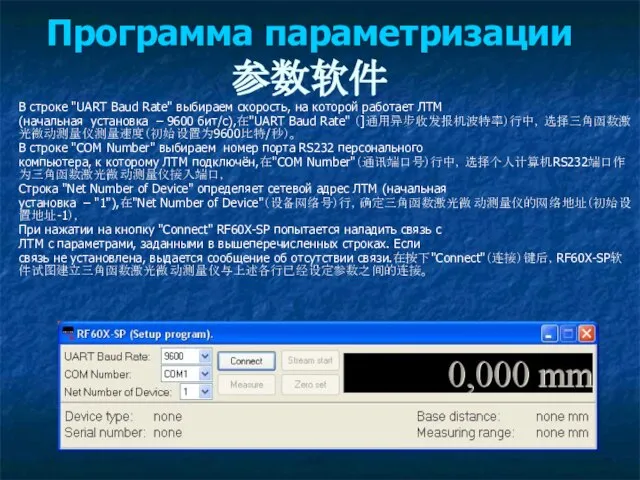
- 9. Программа параметризации参数软件 В строке "UART Baud Rate" выбираем скорость, на которой работает ЛТМ (начальная установка –
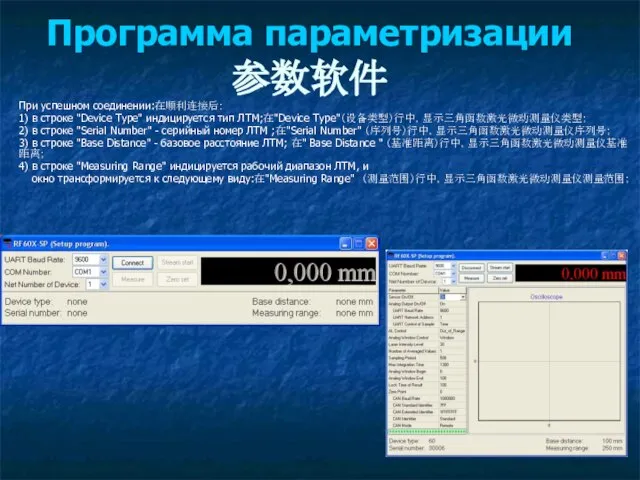
- 10. Программа параметризации参数软件 При успешном соединении:在顺利连接后: 1) в строке "Device Type" индицируется тип ЛТМ;在"Device Type"(设备类型)行中,显示三角函数激光微动测量仪类型; 2) в
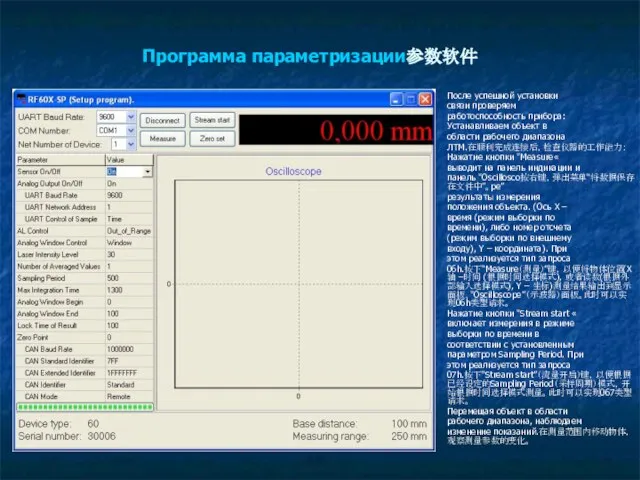
- 11. Программа параметризации参数软件 После успешной установки связи проверяем работоспособность прибора: Устанавливаем объект в области рабочего диапазона ЛТМ.在顺利完成连接后,检查仪器的工作能力:
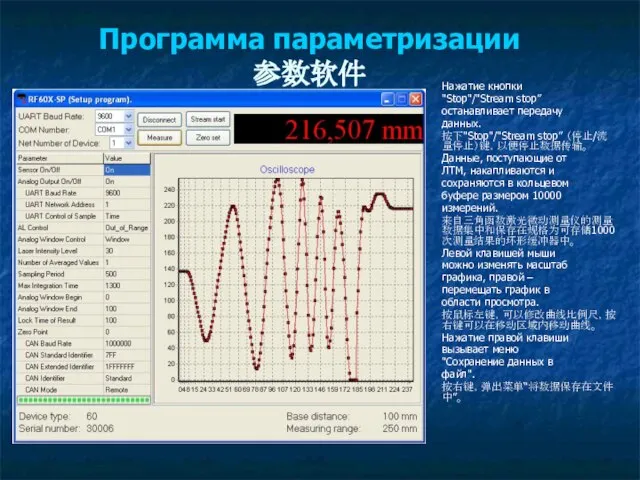
- 12. Программа параметризации 参数软件 Нажатие кнопки "Stop"/"Stream stop” останавливает передачу данных. 按下"Stop"/"Stream stop” (停止/流量停止)键,以便停止数据传输。 Данные, поступающие от
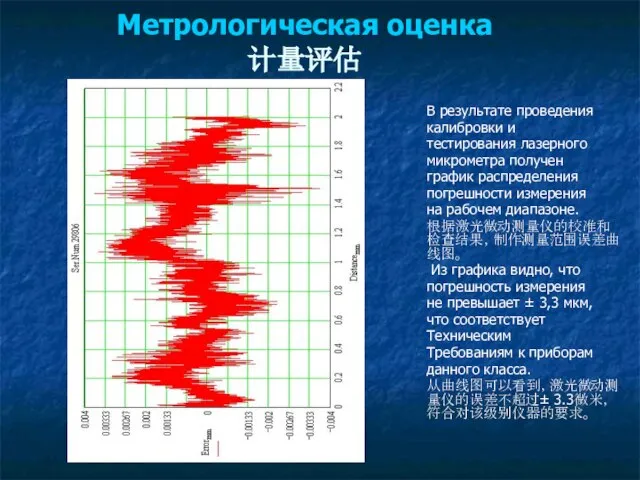
- 13. Метрологическая оценка 计量评估 В результате проведения калибровки и тестирования лазерного микрометра получен график распределения погрешности измерения
- 15. Скачать презентацию
Слайд 3Общие сведения总则
Оптико-электронный измеритель микроперемещений предназначен для бесконтактного измерения размеров, перемещения,
Общие сведения总则
Оптико-электронный измеритель микроперемещений предназначен для бесконтактного измерения размеров, перемещения,
Слайд 4Общие сведения总则
Оптико-электронный измеритель микроперемещений относится к классу лазерных光学-电子微动动作测量仪属于三角函数激光微动测量仪。микрометрометров триангуляционного типа
Общие сведения总则
Оптико-электронный измеритель микроперемещений относится к классу лазерных光学-电子微动动作测量仪属于三角函数激光微动测量仪。микрометрометров триангуляционного типа
Слайд 5Состав макета измерителя测量仪样机的各个组成部分
ЛТМ включает в себя:三角函数激光微动测量仪包括:
полупроводниковый лазер мощностью 5 мВт с
Состав макета измерителя测量仪样机的各个组成部分
ЛТМ включает в себя:三角函数激光微动测量仪包括:
полупроводниковый лазер мощностью 5 мВт с
Слайд 6Устройство и принцип работы结构和工作原理
В основу работы микрометра положен принцип оптической триангуляции. Излучение
Устройство и принцип работы结构和工作原理
В основу работы микрометра положен принцип оптической триангуляции. Излучение
Слайд 7Особенности работы工作特点
ЛТМ подключается к источнику питания и интерфейс в соответствии с рекомендациями
Особенности работы工作特点
ЛТМ подключается к источнику питания и интерфейс в соответствии с рекомендациями
Слайд 8Программа параметризации参数软件
Программное обеспечение “RF60Х-SP”
предназначено для:“RF60Х-SP”软件用于:
тестирования и демонстрации работы ЛТМ;测试和演示三角函数激光微动测量仪工作过程;
настройки параметров ЛТМ;设置三角函数激光微动测量仪;
приема и
Программа параметризации参数软件
Программное обеспечение “RF60Х-SP”
предназначено для:“RF60Х-SP”软件用于:
тестирования и демонстрации работы ЛТМ;测试和演示三角函数激光微动测量仪工作过程;
настройки параметров ЛТМ;设置三角函数激光微动测量仪;
приема и
Слайд 9Программа параметризации参数软件
В строке "UART Baud Rate" выбираем скорость, на которой работает ЛТМ
(начальная
Программа параметризации参数软件
В строке "UART Baud Rate" выбираем скорость, на которой работает ЛТМ
(начальная
Слайд 10Программа параметризации参数软件
При успешном соединении:在顺利连接后:
1) в строке "Device Type" индицируется тип ЛТМ;在"Device Type"(设备类型)行中,显示三角函数激光微动测量仪类型;
2)
Программа параметризации参数软件
При успешном соединении:在顺利连接后:
1) в строке "Device Type" индицируется тип ЛТМ;在"Device Type"(设备类型)行中,显示三角函数激光微动测量仪类型;
2)
Слайд 11Программа параметризации参数软件
После успешной установки
связи проверяем
работоспособность прибора:
Устанавливаем объект в
области рабочего диапазона
ЛТМ.在顺利完成连接后,检查仪器的工作能力:
Нажатие кнопки
Программа параметризации参数软件
После успешной установки
связи проверяем
работоспособность прибора:
Устанавливаем объект в
области рабочего диапазона
ЛТМ.在顺利完成连接后,检查仪器的工作能力:
Нажатие кнопки
Слайд 12Программа параметризации
参数软件
Нажатие кнопки
"Stop"/"Stream stop”
останавливает передачу
данных.
按下"Stop"/"Stream stop” (停止/流量停止)键,以便停止数据传输。
Данные, поступающие от
ЛТМ, накапливаются и
сохраняются в
Программа параметризации
参数软件
Нажатие кнопки
"Stop"/"Stream stop”
останавливает передачу
данных.
按下"Stop"/"Stream stop” (停止/流量停止)键,以便停止数据传输。
Данные, поступающие от
ЛТМ, накапливаются и
сохраняются в
Слайд 13Метрологическая оценка
计量评估
В результате проведения
калибровки и
тестирования лазерного
микрометра получен
график распределения
погрешности измерения
на рабочем диапазоне.
根据激光微动测量仪的校准和检查结果,制作测量范围误差曲线图。
Метрологическая оценка
计量评估
В результате проведения
калибровки и
тестирования лазерного
микрометра получен
график распределения
погрешности измерения
на рабочем диапазоне.
根据激光微动测量仪的校准和检查结果,制作测量范围误差曲线图。
 Презентация на тему Глобальное потепление
Презентация на тему Глобальное потепление  Шкала электромагнитных излучений
Шкала электромагнитных излучений Нашествие с Востока на Русь
Нашествие с Востока на Русь Пример построения системы управления машиностроительным производством
Пример построения системы управления машиностроительным производством Государственная поддержка агрострахования и мелиорации земель
Государственная поддержка агрострахования и мелиорации земель 2012 год. Цементный рынок: как жить в эпоху дефицита?
2012 год. Цементный рынок: как жить в эпоху дефицита? ТЕМА: Пластик- удобно, выгодно, губительно!
ТЕМА: Пластик- удобно, выгодно, губительно! Технологическое нормирование эксплуатационной работы железных дорог
Технологическое нормирование эксплуатационной работы железных дорог Швидке читання - запорука успішного навчання
Швидке читання - запорука успішного навчання Презентация на тему Франция
Презентация на тему Франция МАФ из современных материалов для детских площадок
МАФ из современных материалов для детских площадок Материалы для подготовки к контрольной работе по теме Греция
Материалы для подготовки к контрольной работе по теме Греция Вредные привычки у детей. Консультация для родителей
Вредные привычки у детей. Консультация для родителей Анализ препятствий на пути расширения доступа к услугам по ДКТ и внедрения системы супервизии
Анализ препятствий на пути расширения доступа к услугам по ДКТ и внедрения системы супервизии БИОГРАФИЯ Лавриненкова Владимира Дмитриевича Родился 15 Мая 1919 года в деревне Птахино, Смоленской области, в семье крестьянина. В 1
БИОГРАФИЯ Лавриненкова Владимира Дмитриевича Родился 15 Мая 1919 года в деревне Птахино, Смоленской области, в семье крестьянина. В 1 Добыча полезных ископаемых на Луне из реголита
Добыча полезных ископаемых на Луне из реголита Социальная политика государства
Социальная политика государства 20161109_prezentatsiya_1
20161109_prezentatsiya_1 Презентация на тему Русской речи государь по прозванию Словарь
Презентация на тему Русской речи государь по прозванию Словарь Народная игрушка в развитии дошкольников
Народная игрушка в развитии дошкольников Информационный поиск в Интернете
Информационный поиск в Интернете Жисмоний шахс ер мулк соликлар
Жисмоний шахс ер мулк соликлар Жанры изобразительного искусства
Жанры изобразительного искусства Эффективное регулирование на конкурентных энергетических рынках обеспечивает доступность энергии Сергей Геннадьевич Новиков
Эффективное регулирование на конкурентных энергетических рынках обеспечивает доступность энергии Сергей Геннадьевич Новиков  Презентация на тему Школа будущего
Презентация на тему Школа будущего Рисованные объекты Действия над объектами
Рисованные объекты Действия над объектами Система диагностики и коррекции как снятие психолого-педагогических трудностей при обучении математике слабоуспевающего учени
Система диагностики и коррекции как снятие психолого-педагогических трудностей при обучении математике слабоуспевающего учени Вместе мы – сила!
Вместе мы – сила!