- Проектирование транспортных машин (ТМ)

Содержание
- 2. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач Абстрактный В этой
- 3. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач Экспериментальное исследование динамики
- 4. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач Проблемы обеспечения эффективность
- 5. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач В ряде работ
- 6. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач На основе большого
- 7. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач Однако при установке
- 8. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач для проведения экспериментальных
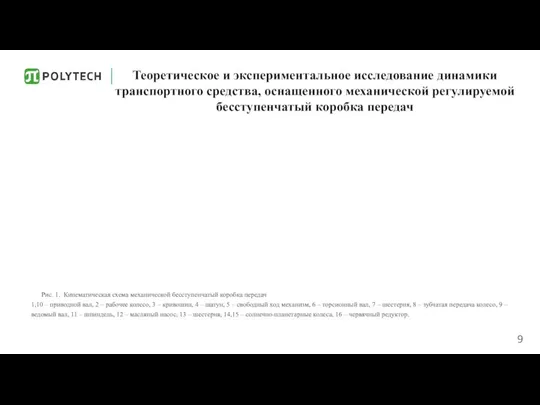
- 9. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач Рис. 1. Кинематическая
- 10. Кинематическая схема преобразователя колебаний На рис. 2 показана кинематическая схема преобразователя колебаний без механизма управления радиусом
- 11. Кинематическая схема преобразователя колебаний l1 – кривошип l2 – шатун l3 – коромысло муфты свободного хода
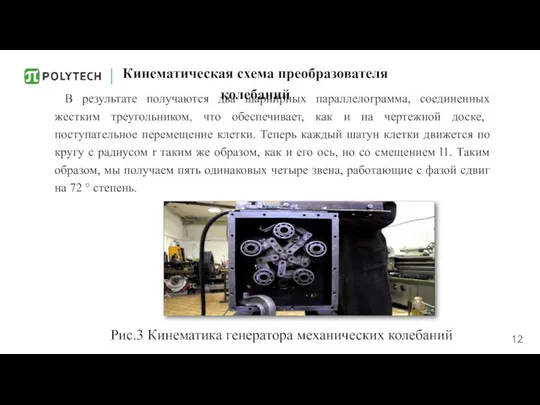
- 12. Кинематическая схема преобразователя колебаний В результате получаются два шарнирных параллелограмма, соединенных жестким треугольником, что обеспечивает, как
- 13. Принцип действия механического бесступенчатый передача происходит следующим образом: вращение приводного вала 1, состоящего из передней 1
- 14. МЕХАНИЧЕСКОЕ РЕГУЛИРУЕМЫЙ БЕССТУПЕНЧАТЫЙ КОРОБКА ПЕРЕДАЧ Трансмиссия передает крутящий момент на ведомый вал непрерывно и несколькими потоками.
- 15. Когда эпициклические шестерни планетарных рядов 14 и 15 неподвижны, солнечные шестерни этих рядов вращаются с одинаковой
- 16. МЕХАНИЧЕСКОЕ РЕГУЛИРУЕМЫЙ БЕССТУПЕНЧАТЫЙ КОРОБКА ПЕРЕДАЧ Рис. 4. Работа импульсной передачи без нагрузки Система смазки трансмиссии включает
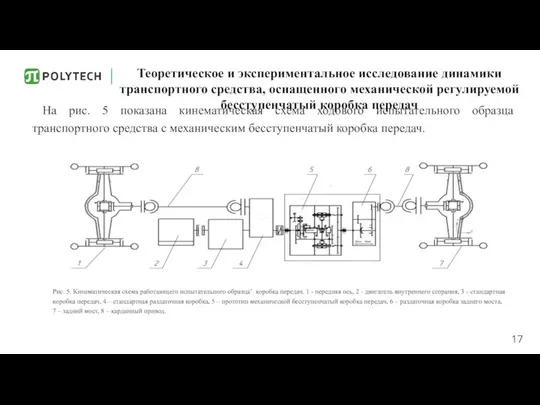
- 17. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач На рис. 5
- 18. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач Развитая механическая бесступенчатый
- 19. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач В этом случае
- 20. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач Теоретическое исследование динамики
- 21. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач Инжир. 6.В simscape
- 22. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач Инжир. 7.Структура блок
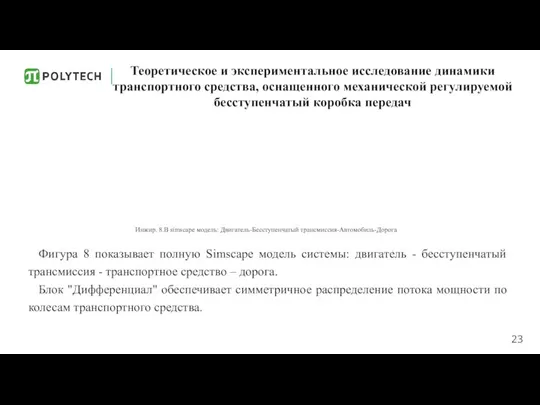
- 23. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач Инжир. 8.В simscape
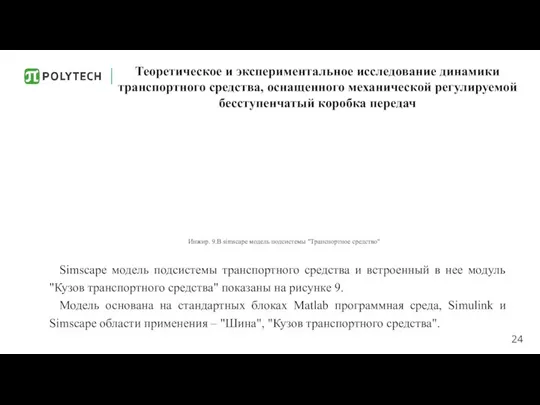
- 24. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач Инжир. 9.В simscape
- 25. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач Параметры, характеризующие динамические
- 26. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач Экспериментальное измерение и
- 27. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач Инжир. 10.В иллюстрация
- 28. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач Рис. 11 Процесс
- 29. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач В ходе теоретического
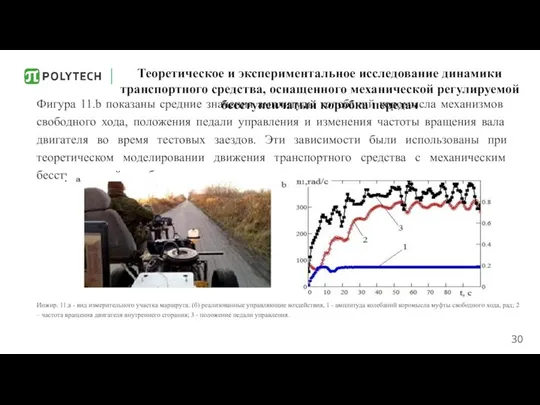
- 30. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач Фигура 11.b показаны
- 31. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач Приведены экспериментальные данные
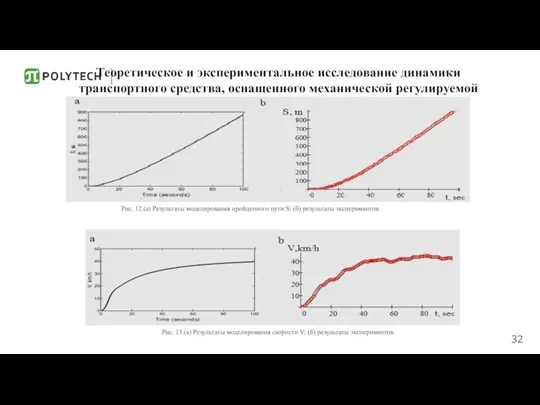
- 32. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач Рис. 12.(а) Результаты
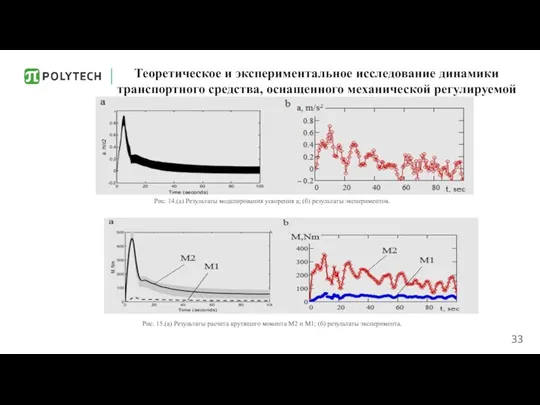
- 33. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач Рис. 14.(а) Результаты
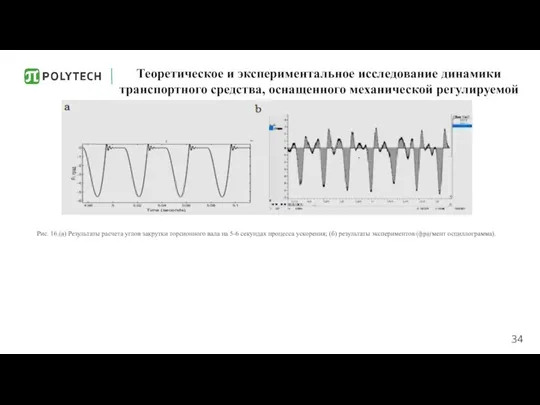
- 34. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач Рис. 16.(а) Результаты
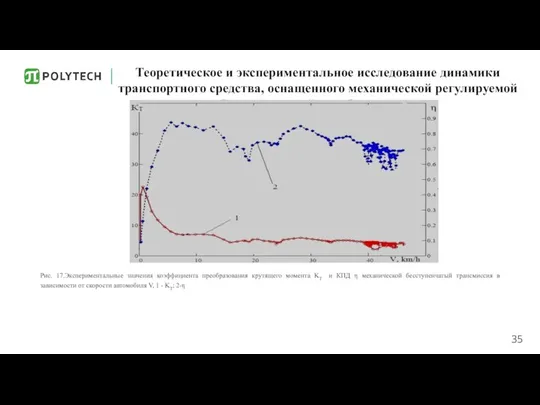
- 35. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач Рис. 17.Экспериментальные значения
- 36. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач По результатам дорожных
- 37. Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка передач Максимальный коэффициент преобразования
- 39. Скачать презентацию
Слайд 2Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 3Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 4Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 5Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 6Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 7Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 8Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 9Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 10Кинематическая схема преобразователя колебаний
На рис. 2 показана кинематическая схема преобразователя колебаний без
Кинематическая схема преобразователя колебаний
На рис. 2 показана кинематическая схема преобразователя колебаний без
Слайд 11Кинематическая схема преобразователя колебаний
l1 – кривошип
l2 – шатун
l3 – коромысло муфты свободного
Кинематическая схема преобразователя колебаний
l1 – кривошип
l2 – шатун
l3 – коромысло муфты свободного
Слайд 12Кинематическая схема преобразователя колебаний
В результате получаются два шарнирных параллелограмма, соединенных жестким треугольником,
Кинематическая схема преобразователя колебаний
В результате получаются два шарнирных параллелограмма, соединенных жестким треугольником,
Слайд 13 Принцип действия механического бесступенчатый передача происходит следующим образом:
вращение приводного вала 1,
Принцип действия механического бесступенчатый передача происходит следующим образом:
вращение приводного вала 1,
Слайд 14МЕХАНИЧЕСКОЕ РЕГУЛИРУЕМЫЙ БЕССТУПЕНЧАТЫЙ КОРОБКА ПЕРЕДАЧ
Трансмиссия передает крутящий момент на ведомый вал непрерывно
МЕХАНИЧЕСКОЕ РЕГУЛИРУЕМЫЙ БЕССТУПЕНЧАТЫЙ КОРОБКА ПЕРЕДАЧ
Трансмиссия передает крутящий момент на ведомый вал непрерывно
Слайд 15 Когда эпициклические шестерни планетарных рядов 14 и 15 неподвижны, солнечные шестерни этих
Когда эпициклические шестерни планетарных рядов 14 и 15 неподвижны, солнечные шестерни этих
Слайд 16МЕХАНИЧЕСКОЕ РЕГУЛИРУЕМЫЙ БЕССТУПЕНЧАТЫЙ КОРОБКА ПЕРЕДАЧ
Рис. 4. Работа импульсной передачи без нагрузки
Система смазки
МЕХАНИЧЕСКОЕ РЕГУЛИРУЕМЫЙ БЕССТУПЕНЧАТЫЙ КОРОБКА ПЕРЕДАЧ
Рис. 4. Работа импульсной передачи без нагрузки
Система смазки

Слайд 17Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 18Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 19Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 20Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 21Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 22Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 23Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 24Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 25Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 26Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 27Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 28Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 29Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 30Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 31Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 32Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 33Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 34Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 35Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 36Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Слайд 37Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
Теоретическое и экспериментальное исследование динамики транспортного средства, оснащенного механической регулируемой бесступенчатый коробка
 Как организовать школьный пресс-центр
Как организовать школьный пресс-центр Оптимизация информационного поля компании в сети Интернет
Оптимизация информационного поля компании в сети Интернет «невероятное путешествие»
«невероятное путешествие» Понятия о давлениях. Геостатическая температура пород
Понятия о давлениях. Геостатическая температура пород Презентация на тему Диофантовы уравнения
Презентация на тему Диофантовы уравнения  V은/ㄴ 후에
V은/ㄴ 후에 Метод незаконченных предложений
Метод незаконченных предложений "Кто есть в большой семье"
"Кто есть в большой семье" Сексизм в политике
Сексизм в политике История моего героя
История моего героя Презентация на тему Сосульки
Презентация на тему Сосульки  Project work 1
Project work 1 Презентация на тему Ордена
Презентация на тему Ордена Психологические особенности организационных структур управления
Психологические особенности организационных структур управления МОУ "СОШ г. Бирюча"
МОУ "СОШ г. Бирюча" Здоровьесберегающие технологии как неотъемлемый компонент в современном образовательном процессе
Здоровьесберегающие технологии как неотъемлемый компонент в современном образовательном процессе Классификация дислексий
Классификация дислексий Регулирование застройки территорий поселений посредством планировки территории
Регулирование застройки территорий поселений посредством планировки территории ПРОГРАММИРОВАНИЕ II
ПРОГРАММИРОВАНИЕ II OSNOVY_ISSLEDOVATEL_SKOI_774_DEYaTEL_NOSTI
OSNOVY_ISSLEDOVATEL_SKOI_774_DEYaTEL_NOSTI Воздействие человека на литосферу
Воздействие человека на литосферу Презентация на тему Безопасность на дороге Викторина по правилам дорожного движения
Презентация на тему Безопасность на дороге Викторина по правилам дорожного движения  Гербы городов мира
Гербы городов мира Цели внедрения системы бюджетирования
Цели внедрения системы бюджетирования Комета-дети
Комета-дети Презентация на тему Характеристика героев в поэме «Мертвые души» Н. В. Гоголя
Презентация на тему Характеристика героев в поэме «Мертвые души» Н. В. Гоголя  КОНТРОЛИРУЕМАЯ ИНДУКЦИЯ СУПЕРОВУЛЯЦИИ Включает: Назначение индукторов суперовуляции Мониторинг или контроль ответа яичнико
КОНТРОЛИРУЕМАЯ ИНДУКЦИЯ СУПЕРОВУЛЯЦИИ Включает: Назначение индукторов суперовуляции Мониторинг или контроль ответа яичнико Сделай шаг навстречу спорту
Сделай шаг навстречу спорту