- Процессоры ADSP-BF53

Содержание
- 2. Процессоры ADSP-BF531, ADSP-BF532 и ADSP-BF533 являются представителями семейства процессоров Blackfin с расширенными возможностями, которые обладают значительно
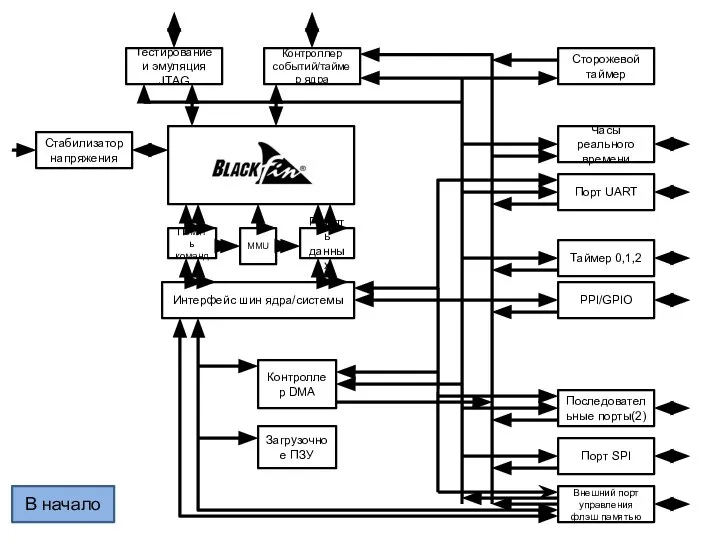
- 3. Стабилизатор напряжения Тестирование и эмуляция JTAG Контроллер событий/таймер ядра Сторожевой таймер Часы реального времени Порт UART
- 4. Эмуляторы производства Analog Devices используют порт доступа тестирования JTAG IEEE 1149.1 процессора для наблюдения и управления
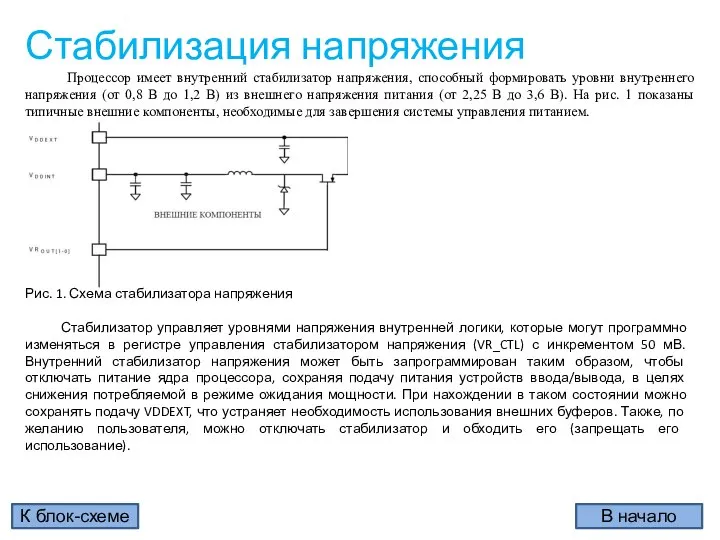
- 5. Стабилизация напряжения Процессор имеет внутренний стабилизатор напряжения, способный формировать уровни внутреннего напряжения (от 0,8 В до
- 6. Сторожевой таймер Процессор содержит 32-разрядный таймер, который может использоваться для реализации функции программного сторожевого таймера. Использование
- 7. Часы реального времени Часы реального времени (RTC, Real-Time Clock) процессора предоставляют набор свойств цифровых часов, включающий
- 8. В начало К блок-схеме Порт UART Процессор имеет полудуплексный порт универсального асинхронного приёмника-передатчика (UART, Universal Asynchronous
- 9. В начало К блок-схеме Таймеры Процессор имеет четыре программируемых таймера общего назначения. Три таймера имеют внешний
- 10. В начало К блок-схеме SPI-интерфейса Порт последовательного периферийного интерфейса (SPI-порт) Процессор имеет SPI-совместимый порт, который позволяет
- 11. В начало К блок-схеме Последовательные порты (SPORT) Процессор имеет два двухканальных синхронных последовательных порта (SPORT0 и
- 12. В начало К блок-схеме Параллельный периферийный интерфейс В процессоре имеется параллельный периферийный интерфейс (PPI, Parallel Peripheral
- 13. В начало К блок-схеме Устройство интерфейса внешней шины Устройство интерфейса внешней шины (EBIU) процессора реализует интерфейс
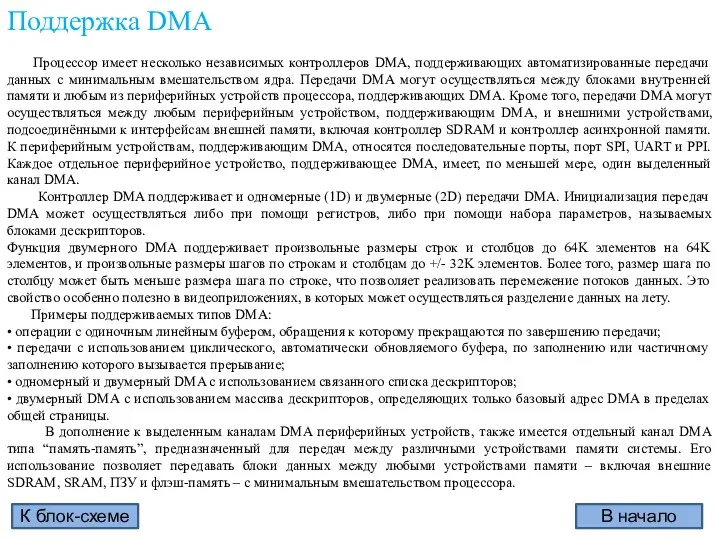
- 14. В начало К блок-схеме Поддержка DMA Процессор имеет несколько независимых контроллеров DMA, поддерживающих автоматизированные передачи данных
- 15. В начало К блок-схеме Методы загрузки Внутреннее загрузочное ПЗУ содержит небольшое загрузочное ядро, которое можно либо
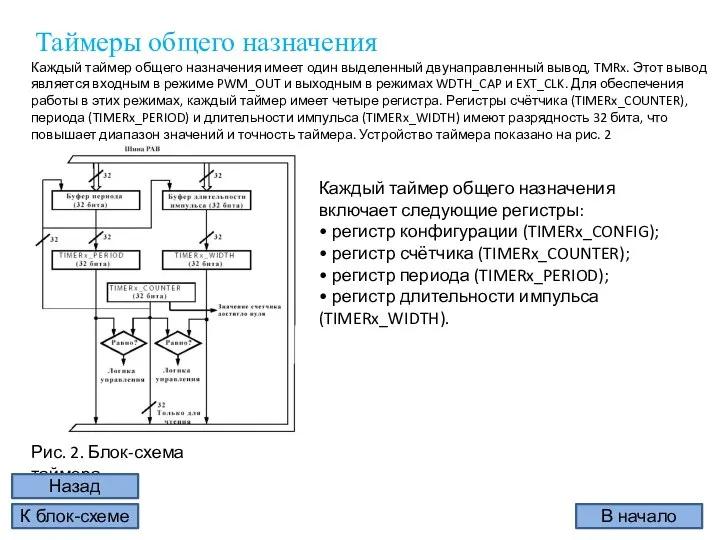
- 16. В начало К блок-схеме Таймеры общего назначения Каждый таймер общего назначения имеет один выделенный двунаправленный вывод,
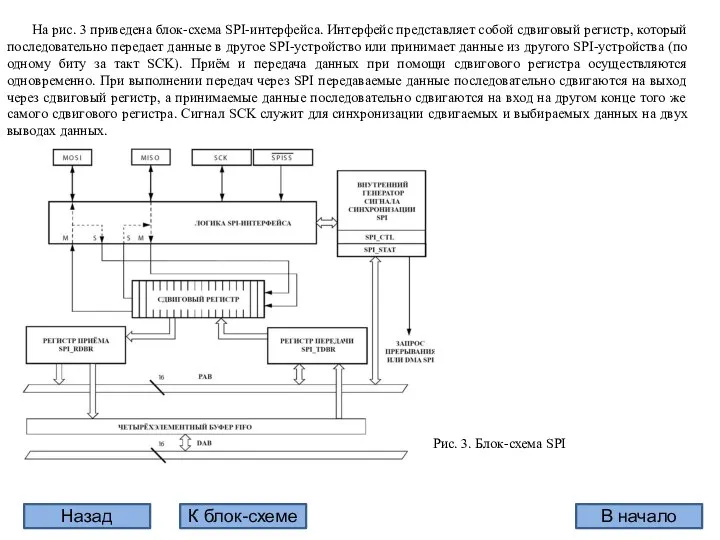
- 17. На рис. 3 приведена блок-схема SPI-интерфейса. Интерфейс представляет собой сдвиговый регистр, который последовательно передает данные в
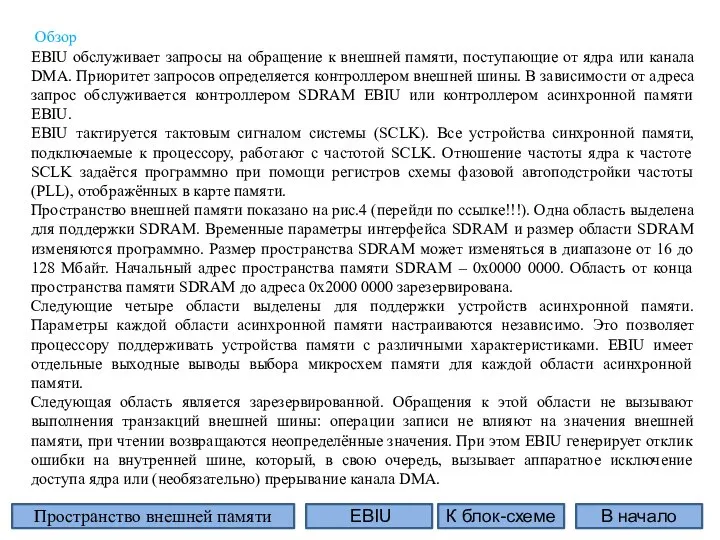
- 18. В начало Пространство внешней памяти Обзор EBIU обслуживает запросы на обращение к внешней памяти, поступающие от
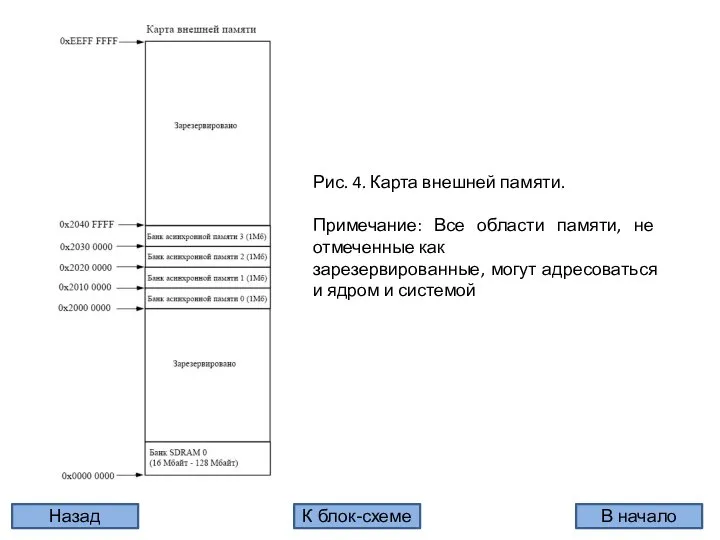
- 19. В начало Назад Рис. 4. Карта внешней памяти. Примечание: Все области памяти, не отмеченные как зарезервированные,
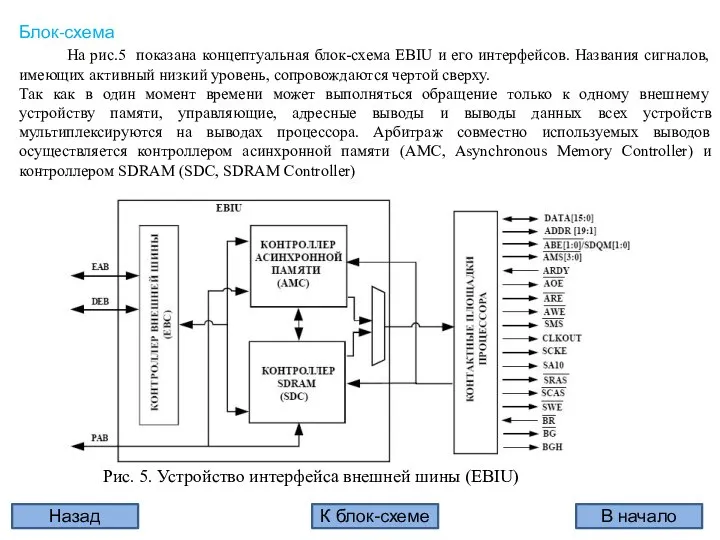
- 20. В начало Назад Блок-схема На рис.5 показана концептуальная блок-схема EBIU и его интерфейсов. Названия сигналов, имеющих
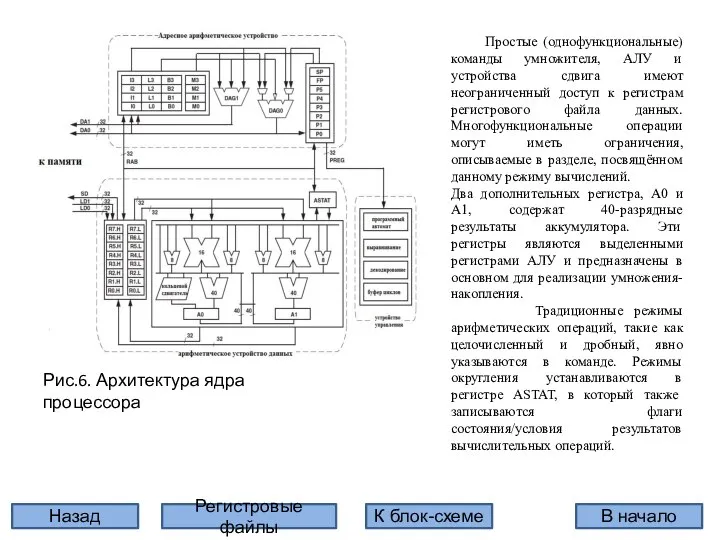
- 21. ВЫЧИСЛИТЕЛЬНЫЕ УСТРОЙСТВА Вычислительные устройства процессора выполняют обработку данных в алгоритмах ЦОС и общего управления. Процессор содержит
- 22. Рис.6. Архитектура ядра процессора В начало Назад К блок-схеме Простые (однофункциональные) команды умножителя, АЛУ и устройства
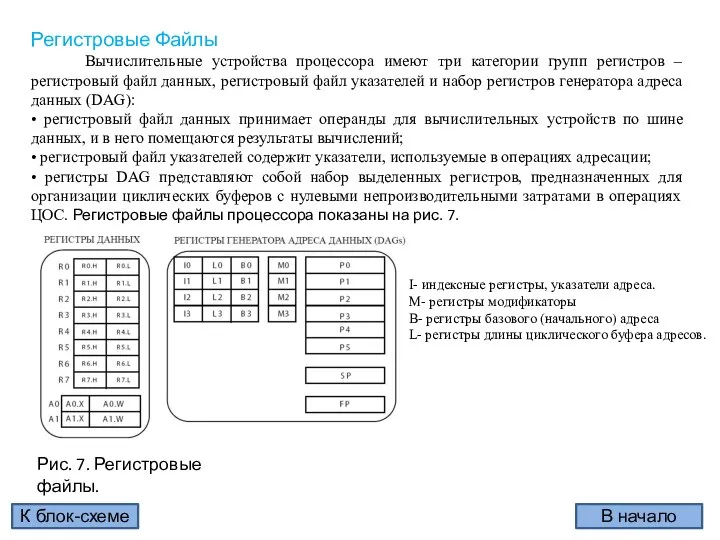
- 23. Регистровые Файлы Вычислительные устройства процессора имеют три категории групп регистров – регистровый файл данных, регистровый файл
- 24. Память команд L1 Память команд L1 состоит из комбинации выделенной SRAM и банков, которые могут конфигурироваться
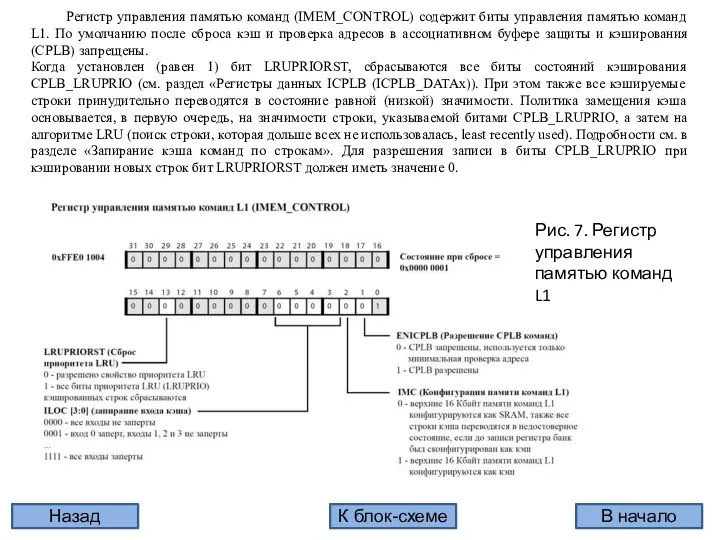
- 25. Рис. 7. Регистр управления памятью команд L1 Регистр управления памятью команд (IMEM_CONTROL) содержит биты управления памятью
- 26. В начало Регистр управления К блок-схеме Память данных L1 SRAM/кэш данных L1 состоит из однопортовых подразделов,
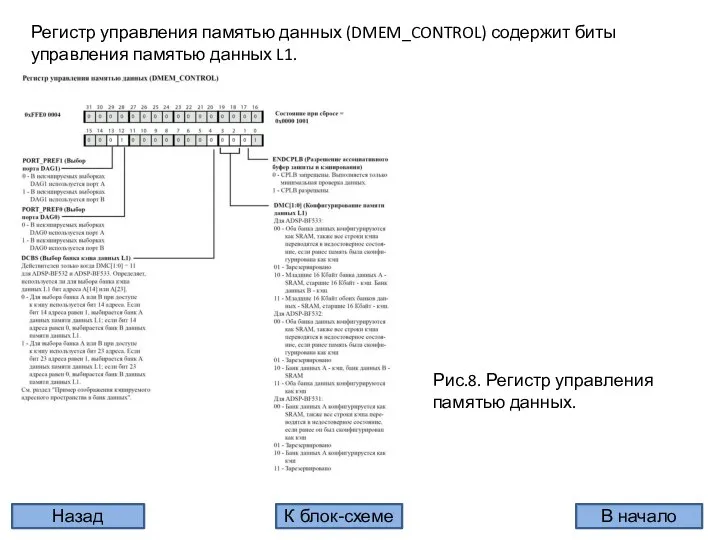
- 27. В начало Назад К блок-схеме Регистр управления памятью данных (DMEM_CONTROL) содержит биты управления памятью данных L1.
- 29. Скачать презентацию
Слайд 2 Процессоры ADSP-BF531, ADSP-BF532 и ADSP-BF533 являются представителями семейства процессоров Blackfin с
Процессоры ADSP-BF531, ADSP-BF532 и ADSP-BF533 являются представителями семейства процессоров Blackfin с
Слайд 3Стабилизатор напряжения
Тестирование и эмуляция JTAG
Контроллер событий/таймер ядра
Сторожевой таймер
Часы реального времени
Порт UART
Таймер 0,1,2
PPI/GPIO
Последовательные
Стабилизатор напряжения
Тестирование и эмуляция JTAG
Контроллер событий/таймер ядра
Сторожевой таймер
Часы реального времени
Порт UART
Таймер 0,1,2
PPI/GPIO
Последовательные
Слайд 4 Эмуляторы производства Analog Devices используют порт доступа тестирования JTAG IEEE 1149.1
Эмуляторы производства Analog Devices используют порт доступа тестирования JTAG IEEE 1149.1
Слайд 5Стабилизация напряжения
Процессор имеет внутренний стабилизатор напряжения, способный формировать уровни внутреннего
Стабилизация напряжения
Процессор имеет внутренний стабилизатор напряжения, способный формировать уровни внутреннего
Слайд 6Сторожевой таймер
Процессор содержит 32-разрядный таймер, который может использоваться для реализации
Сторожевой таймер
Процессор содержит 32-разрядный таймер, который может использоваться для реализации
Слайд 7Часы реального времени
Часы реального времени (RTC, Real-Time Clock) процессора предоставляют
Часы реального времени
Часы реального времени (RTC, Real-Time Clock) процессора предоставляют
Слайд 8В начало
К блок-схеме
Порт UART
Процессор имеет полудуплексный порт универсального асинхронного приёмника-передатчика
В начало
К блок-схеме
Порт UART
Процессор имеет полудуплексный порт универсального асинхронного приёмника-передатчика
Слайд 9В начало
К блок-схеме
Таймеры
Процессор имеет четыре программируемых таймера общего назначения.
В начало
К блок-схеме
Таймеры
Процессор имеет четыре программируемых таймера общего назначения.
Слайд 10В начало
К блок-схеме SPI-интерфейса
Порт последовательного периферийного интерфейса (SPI-порт)
Процессор имеет SPI-совместимый
В начало
К блок-схеме SPI-интерфейса
Порт последовательного периферийного интерфейса (SPI-порт)
Процессор имеет SPI-совместимый
Слайд 11В начало
К блок-схеме
Последовательные порты (SPORT)
Процессор имеет два двухканальных синхронных последовательных порта
В начало
К блок-схеме
Последовательные порты (SPORT)
Процессор имеет два двухканальных синхронных последовательных порта
Слайд 12В начало
К блок-схеме
Параллельный периферийный интерфейс
В процессоре имеется параллельный периферийный интерфейс
В начало
К блок-схеме
Параллельный периферийный интерфейс
В процессоре имеется параллельный периферийный интерфейс
Слайд 13В начало
К блок-схеме
Устройство интерфейса внешней шины
Устройство интерфейса внешней шины (EBIU)
В начало
К блок-схеме
Устройство интерфейса внешней шины
Устройство интерфейса внешней шины (EBIU)
Слайд 14В начало
К блок-схеме
Поддержка DMA
Процессор имеет несколько независимых контроллеров DMA, поддерживающих
В начало
К блок-схеме
Поддержка DMA
Процессор имеет несколько независимых контроллеров DMA, поддерживающих
Слайд 15В начало
К блок-схеме
Методы загрузки
Внутреннее загрузочное ПЗУ содержит небольшое загрузочное ядро, которое
В начало
К блок-схеме
Методы загрузки
Внутреннее загрузочное ПЗУ содержит небольшое загрузочное ядро, которое
Слайд 16В начало
К блок-схеме
Таймеры общего назначения
Каждый таймер общего назначения имеет один
В начало
К блок-схеме
Таймеры общего назначения
Каждый таймер общего назначения имеет один
Слайд 17 На рис. 3 приведена блок-схема SPI-интерфейса. Интерфейс представляет собой сдвиговый регистр,
На рис. 3 приведена блок-схема SPI-интерфейса. Интерфейс представляет собой сдвиговый регистр,
Слайд 18В начало
Пространство внешней памяти
Обзор
EBIU обслуживает запросы на обращение к внешней
В начало
Пространство внешней памяти
Обзор
EBIU обслуживает запросы на обращение к внешней
Слайд 19В начало
Назад
Рис. 4. Карта внешней памяти.
Примечание: Все области памяти, не отмеченные как
В начало
Назад
Рис. 4. Карта внешней памяти.
Примечание: Все области памяти, не отмеченные как
Слайд 20В начало
Назад
Блок-схема
На рис.5 показана концептуальная блок-схема EBIU и его интерфейсов.
В начало
Назад
Блок-схема
На рис.5 показана концептуальная блок-схема EBIU и его интерфейсов.
Слайд 21
ВЫЧИСЛИТЕЛЬНЫЕ УСТРОЙСТВА
Вычислительные устройства процессора выполняют обработку данных в алгоритмах ЦОС и
ВЫЧИСЛИТЕЛЬНЫЕ УСТРОЙСТВА
Вычислительные устройства процессора выполняют обработку данных в алгоритмах ЦОС и
Слайд 22Рис.6. Архитектура ядра процессора
В начало
Назад
К блок-схеме
Простые (однофункциональные) команды умножителя, АЛУ
Рис.6. Архитектура ядра процессора
В начало
Назад
К блок-схеме
Простые (однофункциональные) команды умножителя, АЛУ
Слайд 23Регистровые Файлы
Вычислительные устройства процессора имеют три категории групп регистров –
Регистровые Файлы
Вычислительные устройства процессора имеют три категории групп регистров –
Слайд 24Память команд L1
Память команд L1 состоит из комбинации выделенной SRAM и
Память команд L1
Память команд L1 состоит из комбинации выделенной SRAM и
Слайд 25Рис. 7. Регистр управления памятью команд L1
Регистр управления памятью команд
Рис. 7. Регистр управления памятью команд L1
Регистр управления памятью команд
Слайд 26В начало
Регистр управления
К блок-схеме
Память данных L1
SRAM/кэш данных L1 состоит из однопортовых
В начало
Регистр управления
К блок-схеме
Память данных L1
SRAM/кэш данных L1 состоит из однопортовых
Слайд 27В начало
Назад
К блок-схеме
Регистр управления памятью данных (DMEM_CONTROL) содержит биты управления памятью данных
В начало
Назад
К блок-схеме
Регистр управления памятью данных (DMEM_CONTROL) содержит биты управления памятью данных
 Деепричастие
Деепричастие Продажа помещения. Фото (11)
Продажа помещения. Фото (11) Действия с фрагментами рисунка
Действия с фрагментами рисунка Развитие взглядов на природу света. Скорость света
Развитие взглядов на природу света. Скорость света Алкоголизм называют "болезнью номер три" после сердечнососудистых и онкологических заболеваний. Алкоголизм - болезнь очень странн
Алкоголизм называют "болезнью номер три" после сердечнососудистых и онкологических заболеваний. Алкоголизм - болезнь очень странн Экстремумы функции
Экстремумы функции ФГОС
ФГОС Презентация на тему Прямоугольный параллелепипед
Презентация на тему Прямоугольный параллелепипед Байкал
Байкал Презентация на тему Особенности размножения рыб 7 класс
Презентация на тему Особенности размножения рыб 7 класс  Константин Дмитриевич Флавицкий. Княжна Тараканова
Константин Дмитриевич Флавицкий. Княжна Тараканова Презентация на тему: П.Л.Чебышев – создатель Петербургской математической школы
Презентация на тему: П.Л.Чебышев – создатель Петербургской математической школы Товары для малышей. Торговая марка Markus
Товары для малышей. Торговая марка Markus Домодедово, Каширское ш. 3
Домодедово, Каширское ш. 3 Костромское деревянное зодчество
Костромское деревянное зодчество My future
My future Принципы решения научных задач в медицине
Принципы решения научных задач в медицине Презентация на тему Как человек открывал Землю
Презентация на тему Как человек открывал Землю  Миграция на SQL Server 2008:Чего можно ожидать и как с этим бороться
Миграция на SQL Server 2008:Чего можно ожидать и как с этим бороться Презентация на тему Химический элемент - водород
Презентация на тему Химический элемент - водород Эмоционально творческое развитие дошкольников посредством цветотерапии
Эмоционально творческое развитие дошкольников посредством цветотерапии Новые подходы к организации внеучебной деятельности в НГУЭУ НИНХ
Новые подходы к организации внеучебной деятельности в НГУЭУ НИНХ Календарное планирование в разновозрастной (санаторной) группе. Дети с 3-х до 7 лет
Календарное планирование в разновозрастной (санаторной) группе. Дети с 3-х до 7 лет Перспективы применения технологий открытого кода (Open Source) для системы формирования информационных ресурсов и аналитической подде
Перспективы применения технологий открытого кода (Open Source) для системы формирования информационных ресурсов и аналитической подде Вводные слова и вводные предложения. Вставные конструкции
Вводные слова и вводные предложения. Вставные конструкции Сервис дистанционной подготовки к ЕГЭhttp://www.edu-on-line.ru приветствует Вас!
Сервис дистанционной подготовки к ЕГЭhttp://www.edu-on-line.ru приветствует Вас! Справочник «Полиграфия Украины»
Справочник «Полиграфия Украины» Новинки в ассортименте фасадной плитки Hauberk-2021
Новинки в ассортименте фасадной плитки Hauberk-2021