- Робот-Склад

Содержание
- 2. Проблема Ошибки персонала всегда имеют критическое значение для склада. За ними следует недовольство конечных получателей и
- 3. Аналоги https://yandex.ru/efir?stream_id=veCX6mAHMpDc&from_block=player_context_menu_yavideo – проект WRO сеть умных складов «Smart Logistics» Изменения: Будет создан один робот для
- 4. Цель проекта Получить робота способного: Распределять груз по маркеровке Принимать груз Перемещать груз Выдавать груз Получить
- 5. Задачи Создать конструкцию для передвежения по оси вперёд-назад. Создать коретку, способную передвигаться влево-вправо. Создать манипулятор способный
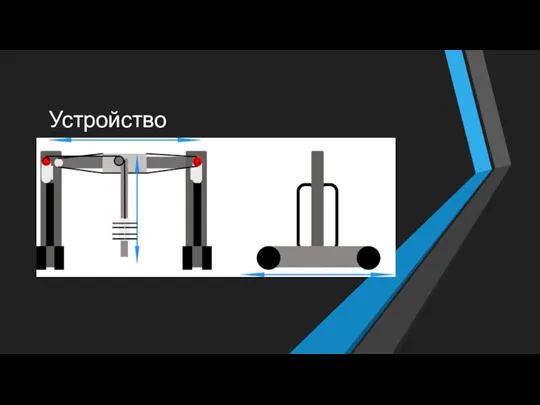
- 6. Устройство
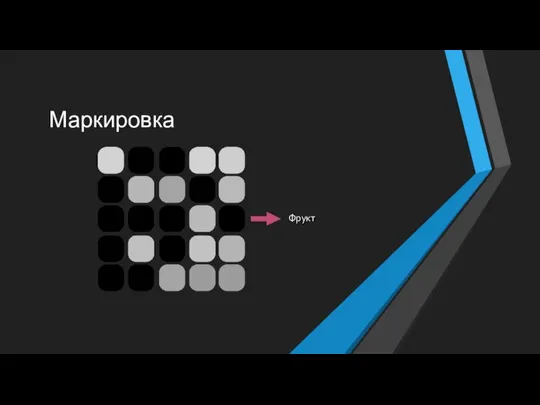
- 7. Маркировка Фрукт
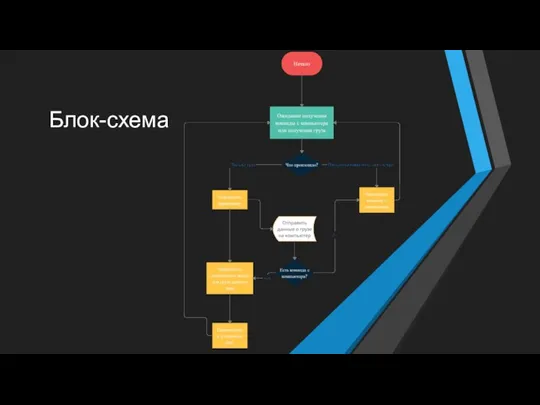
- 8. Блок-схема
- 10. Скачать презентацию
Слайд 2Проблема
Ошибки персонала всегда имеют критическое значение для склада. За ними следует недовольство
Проблема
Ошибки персонала всегда имеют критическое значение для склада. За ними следует недовольство
Слайд 3Аналоги
https://yandex.ru/efir?stream_id=veCX6mAHMpDc&from_block=player_context_menu_yavideo – проект WRO сеть умных складов «Smart Logistics»
Изменения:
Будет создан один робот
Аналоги
https://yandex.ru/efir?stream_id=veCX6mAHMpDc&from_block=player_context_menu_yavideo – проект WRO сеть умных складов «Smart Logistics»
Изменения:
Будет создан один робот
Слайд 4Цель проекта
Получить робота способного:
Распределять груз по маркеровке
Принимать груз
Перемещать груз
Выдавать груз
Получить ПО способное:
Подавать
Цель проекта
Получить робота способного:
Распределять груз по маркеровке
Принимать груз
Перемещать груз
Выдавать груз
Получить ПО способное:
Подавать
Слайд 5Задачи
Создать конструкцию для передвежения по оси вперёд-назад.
Создать коретку, способную передвигаться влево-вправо.
Создать манипулятор
Задачи
Создать конструкцию для передвежения по оси вперёд-назад.
Создать коретку, способную передвигаться влево-вправо.
Создать манипулятор
Слайд 6Устройство
Устройство
Слайд 7Маркировка
Фрукт
Маркировка
Фрукт
Слайд 8Блок-схема
Блок-схема
 Гуру-Пуджа
Гуру-Пуджа Сумма углов треугольника
Сумма углов треугольника Доклад руководителя Федерального дорожного агентства Чабунина Анатолия Михайловича
Доклад руководителя Федерального дорожного агентства Чабунина Анатолия Михайловича СОВЕРШЕНСТВОВАНИЕ МЕТОДОВ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДЕБИТА НЕФТЕДОБЫВАЮЩИХ СКВАЖИН_______________________________
СОВЕРШЕНСТВОВАНИЕ МЕТОДОВ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДЕБИТА НЕФТЕДОБЫВАЮЩИХ СКВАЖИН_______________________________ Труд души
Труд души Чакир Дмитрий Руководитель проекта
Чакир Дмитрий Руководитель проекта 1 От запроса до ответа Тенденции в представлении страницы результатов поиска Александр Садовский 11 ноября 2008.
1 От запроса до ответа Тенденции в представлении страницы результатов поиска Александр Садовский 11 ноября 2008. Целеполагание, мотивация и стимулирование в системе корпоративного менеджмента
Целеполагание, мотивация и стимулирование в системе корпоративного менеджмента Логотип и фирменный стиль сети аптечных супермаркетов «Сити Фарма».
Логотип и фирменный стиль сети аптечных супермаркетов «Сити Фарма». Электроснабжение ООО Константиновское с разработкой молниезащиты и заземления электрооборудования подстанции
Электроснабжение ООО Константиновское с разработкой молниезащиты и заземления электрооборудования подстанции Себестоимость
Себестоимость Простые и сложные вещества. Основные классы неорганических веществ. Номенклатура соединений
Простые и сложные вещества. Основные классы неорганических веществ. Номенклатура соединений 20105469
20105469 Презентация на тему Влияние античной культуры на современную жизнь
Презентация на тему Влияние античной культуры на современную жизнь The Past Simple
The Past Simple Презентация на тему Электробезопасность Опасности электрических систем
Презентация на тему Электробезопасность Опасности электрических систем  Общие понятия и определения экономики
Общие понятия и определения экономики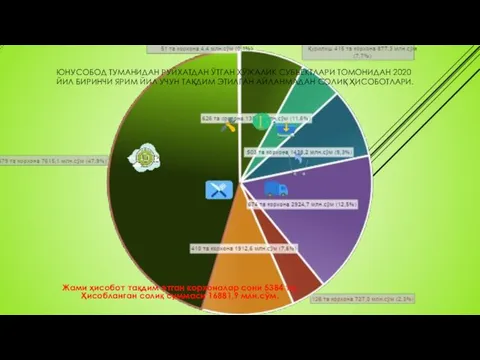 Юнусобод туманидан руйхатдан ўтган хўжалик субъектлари томонидан 2020
Юнусобод туманидан руйхатдан ўтган хўжалик субъектлари томонидан 2020 А.С.Пушкин. Адресаты любовной лирики
А.С.Пушкин. Адресаты любовной лирики Государственный план подготовки управленческих кадров:Информационное обеспечение конкурсного отбора специалистов в 2009 г.
Государственный план подготовки управленческих кадров:Информационное обеспечение конкурсного отбора специалистов в 2009 г. Агния Львовна Барто
Агния Львовна Барто Маркетинговая стратегия города в маркетинговой стратегии региона
Маркетинговая стратегия города в маркетинговой стратегии региона СТРАНЫ ЮГО - ВОСТОЧНОЙ АЗИИ. ИНДОНЕЗИЯ
СТРАНЫ ЮГО - ВОСТОЧНОЙ АЗИИ. ИНДОНЕЗИЯ Сочинение по картине Т. Н. Яблонской "Утро"
Сочинение по картине Т. Н. Яблонской "Утро" Shopping for food
Shopping for food Фармако-экономические аспекты оптимизации терапии бронхиальной астмы в реальной клинической практике
Фармако-экономические аспекты оптимизации терапии бронхиальной астмы в реальной клинической практике 26.09-30.09(1)
26.09-30.09(1) Региональная база информационных ресурсов для сферы образования (РНБО)
Региональная база информационных ресурсов для сферы образования (РНБО)