- Составление структурной схемы динамической модели двигателя постоянного тока с якорным управлением

Содержание
- 2. Во многих комплексах ЭП с машинами постоянного тока занимают центральное место, что обусловлено такими преимуществами, как
- 3. Динамические свойства силового канала ЭП с ДПТЯУ описываются уравнением электрического равновесия (2.1) где Kе – коэффициент
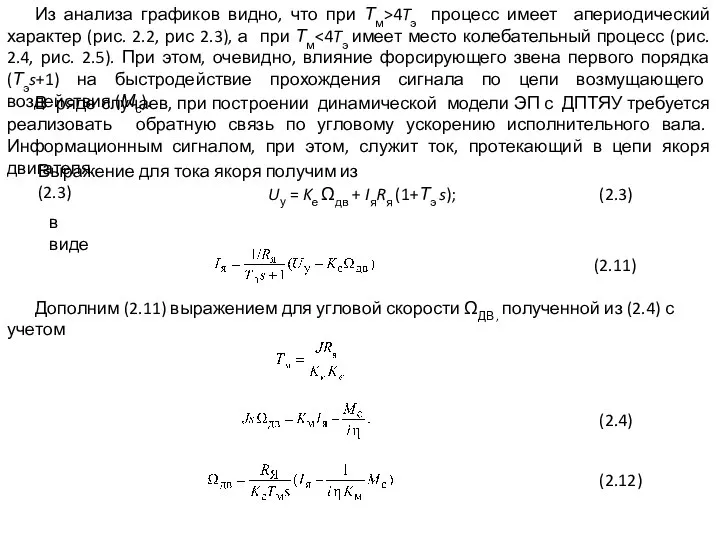
- 4. Тогда Uу = Kе Ωдв + IяRя (1+Тэ s); (2.3) (2.4) где – электромагнитная постоянная времени
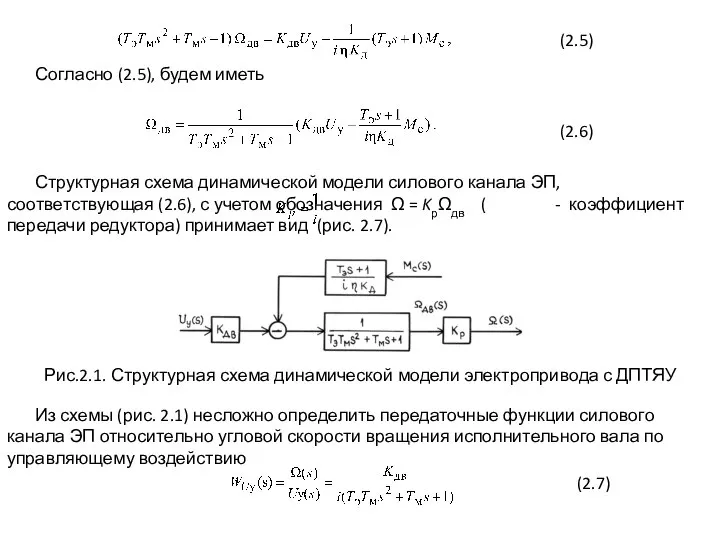
- 5. Согласно (2.5), будем иметь (2.5) (2.6) Структурная схема динамической модели силового канала ЭП, соответствующая (2.6), с
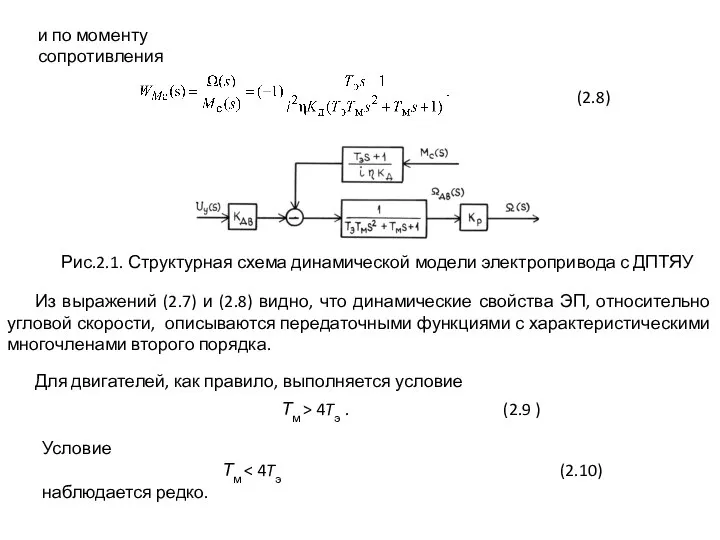
- 6. и по моменту сопротивления (2.8) Рис.2.1. Структурная схема динамической модели электропривода с ДПТЯУ Из выражений (2.7)
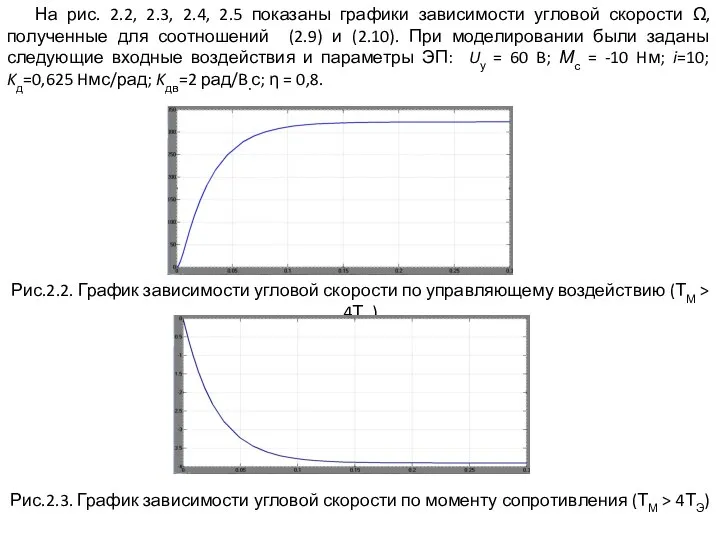
- 7. На рис. 2.2, 2.3, 2.4, 2.5 показаны графики зависимости угловой скорости Ω, полученные для соотношений (2.9)
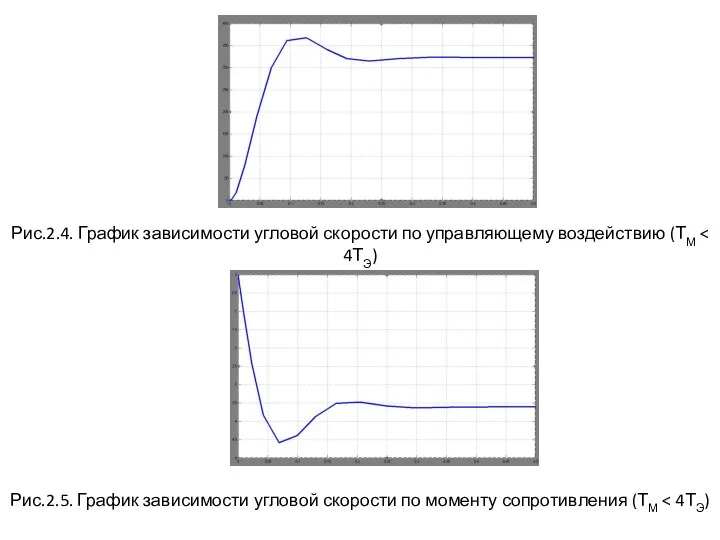
- 8. Рис.2.4. График зависимости угловой скорости по управляющему воздействию (ТМ Рис.2.5. График зависимости угловой скорости по моменту
- 9. Из анализа графиков видно, что при Тм>4Tэ процесс имеет апериодический характер (рис. 2.2, рис 2.3), а
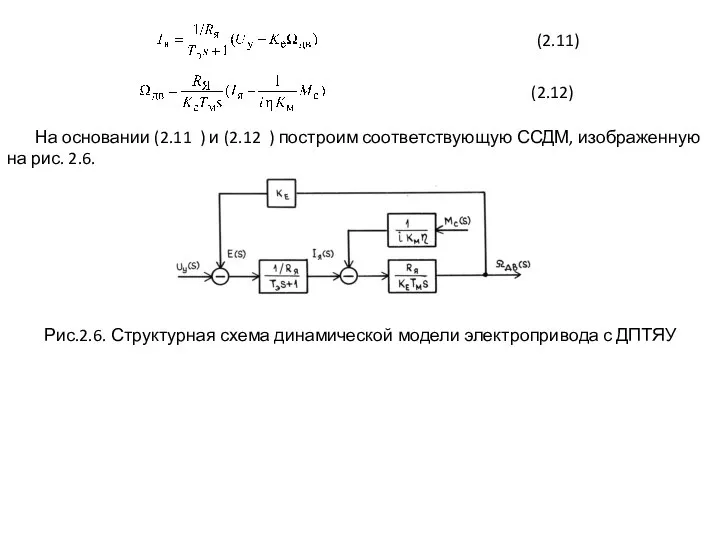
- 10. (2.11) (2.12) На основании (2.11 ) и (2.12 ) построим соответствующую ССДМ, изображенную на рис. 2.6.
- 14. Скачать презентацию
Слайд 3Динамические свойства силового канала ЭП с ДПТЯУ описываются уравнением электрического равновесия
(2.1)
где Kе
Динамические свойства силового канала ЭП с ДПТЯУ описываются уравнением электрического равновесия
(2.1)
где Kе
Слайд 4Тогда
Uу = Kе Ωдв + IяRя (1+Тэ s); (2.3)
(2.4)
где –
Тогда
Uу = Kе Ωдв + IяRя (1+Тэ s); (2.3)
(2.4)
где –
Слайд 5Согласно (2.5), будем иметь
(2.5)
(2.6)
Структурная схема динамической модели силового канала ЭП, соответствующая (2.6),
Согласно (2.5), будем иметь
(2.5)
(2.6)
Структурная схема динамической модели силового канала ЭП, соответствующая (2.6),
Слайд 6и по моменту сопротивления
(2.8)
Рис.2.1. Структурная схема динамической модели электропривода с ДПТЯУ
Из выражений
и по моменту сопротивления
(2.8)
Рис.2.1. Структурная схема динамической модели электропривода с ДПТЯУ
Из выражений
Слайд 7На рис. 2.2, 2.3, 2.4, 2.5 показаны графики зависимости угловой скорости Ω,
На рис. 2.2, 2.3, 2.4, 2.5 показаны графики зависимости угловой скорости Ω,
Слайд 8Рис.2.4. График зависимости угловой скорости по управляющему воздействию (ТМ < 4ТЭ)
Рис.2.5. График
Рис.2.4. График зависимости угловой скорости по управляющему воздействию (ТМ < 4ТЭ)
Рис.2.5. График
Слайд 9Из анализа графиков видно, что при Тм>4Tэ процесс имеет апериодический характер (рис.
Из анализа графиков видно, что при Тм>4Tэ процесс имеет апериодический характер (рис.
Слайд 10(2.11)
(2.12)
На основании (2.11 ) и (2.12 ) построим соответствующую ССДМ, изображенную на
(2.11)
(2.12)
На основании (2.11 ) и (2.12 ) построим соответствующую ССДМ, изображенную на


 Прикладные виды спорта
Прикладные виды спорта Компьютерная программа FRITZ 12
Компьютерная программа FRITZ 12 Баскетбол. Совершенствование навыков ловли мяча, передачи мяча
Баскетбол. Совершенствование навыков ловли мяча, передачи мяча Международная торговля
Международная торговля Стандартизация оказания медицинской помощи и медицинский опросник для детей с муковисцидозом
Стандартизация оказания медицинской помощи и медицинский опросник для детей с муковисцидозом  «Продажи в дистрибуции» - новый мультимедийный курс для торговых компаний
«Продажи в дистрибуции» - новый мультимедийный курс для торговых компаний Основные понятия: Брак – добровольный союз мужчины и женщины с целью создания семьи. Права и обязанности родителей Права и обязан
Основные понятия: Брак – добровольный союз мужчины и женщины с целью создания семьи. Права и обязанности родителей Права и обязан Презентация на тему Античная лирика
Презентация на тему Античная лирика Презентация на тему Буква О
Презентация на тему Буква О Этап разработки конструкторской документации. Нормативная база, конструкторская документация в виде трехмерных моделей. Лекция 8
Этап разработки конструкторской документации. Нормативная база, конструкторская документация в виде трехмерных моделей. Лекция 8 Политика и власть
Политика и власть A p r o j e c t o f
A p r o j e c t o f Для чего дует ветер?
Для чего дует ветер? Презентация на тему Фламинго
Презентация на тему Фламинго  МОДЕЛЬ ТОЧКИ
МОДЕЛЬ ТОЧКИ Сущность и функции денег
Сущность и функции денег Больше. Меньше. Столько же.
Больше. Меньше. Столько же. Анализ структуры и деятельности МБУ ДО ЦДЮ Созвездие
Анализ структуры и деятельности МБУ ДО ЦДЮ Созвездие Поведение и поступок
Поведение и поступок Нижегородский филиал
Нижегородский филиал Добро и зло (9 класс)
Добро и зло (9 класс) Школьная библиотека/медиатека – навигатор детского чтения 2011
Школьная библиотека/медиатека – навигатор детского чтения 2011 rezhim_dnya
rezhim_dnya По следам теоремы Пифагора
По следам теоремы Пифагора Обувь. Рюкзаки
Обувь. Рюкзаки Международная торговля услугами
Международная торговля услугами  Презентация на тему Архитектура Древней Греции и Древнего Рима
Презентация на тему Архитектура Древней Греции и Древнего Рима Блок обучения. Для сотрудников Компании “Шин Line”
Блок обучения. Для сотрудников Компании “Шин Line”