- Сучасні частотно-керовані електроприводи змінного струму

Содержание
- 2. Зміст Основи теорії частотного керування асинхронними електроприводами Принцип роботи асинхронного двигуна, основні співвідношення Закони частотного керування:
- 3. Основи теорії частотного керування асинхронними електроприводами Принцип роботи асинхронного двигуна, основні співвідношення Закони частотного керування: Скалярне
- 4. КОНСТРУКЦІЯ АСИНХРОННИХ ДВИГУНІВ
- 5. ПРИНЦИП РОБОТИ АСИНХРОННОГО ДВИГУНА Створення магнітного поля (3 катушки) iA=Imsinωt iB=Imsin(ωt-120º) iC=Imsin(ωt-240º) A B C 120º
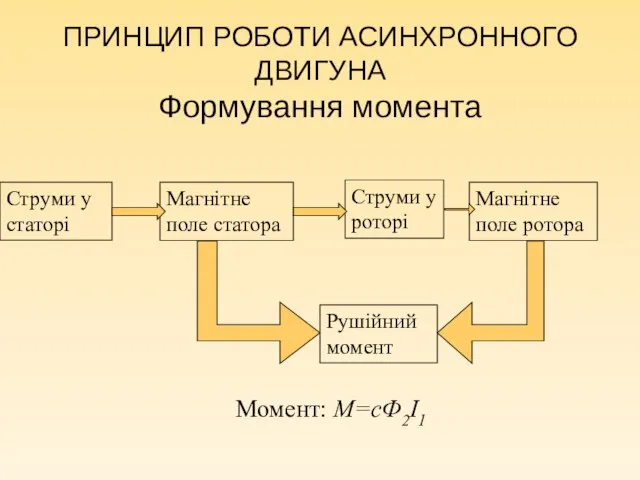
- 6. ПРИНЦИП РОБОТИ АСИНХРОННОГО ДВИГУНА Формування момента Магнітне поле статора Струми у роторі Магнітне поле ротора Струми
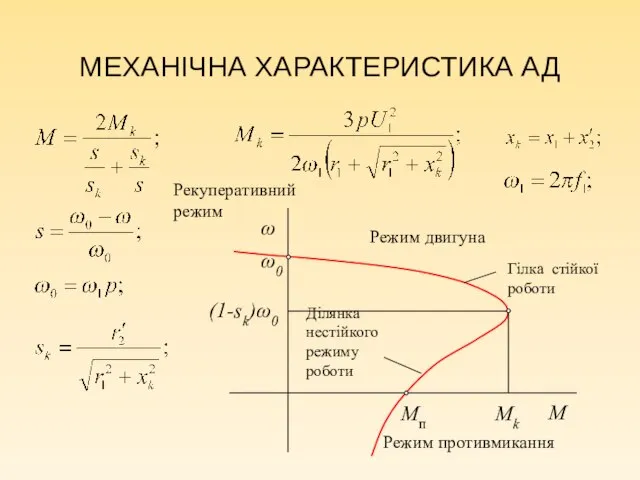
- 7. МЕХАНІЧНА ХАРАКТЕРИСТИКА АД Mk ω0 Mп (1-sk)ω0 Режим двигуна Режим противмикання Рекуперативний режим Ділянка нестійкого режиму
- 8. ЗАКОНИ ЧАСТОТНОГО КЕРУВАННЯ Uн fн fmax U1 Mk Застосування: Потужні АД з моментом навантаження , яке
- 9. ЗАКОНИ ЧАСТОТНОГО КЕРУВАННЯ Застосування: вентилятори; насоси; компресори
- 10. ЗАКОНИ ЧАСТОТНОГО КЕРУВАННЯ Uн fн fmax U1 Mk Застосування: конвейори млини, тощо
- 11. ЗАКОНИ ЧАСТОТНОГО КЕРУВАННЯ Uн fн fmax Застосування: двигуни малої потужності IR-компенсація f1=50 Гц f1=25 Гц f1=12
- 12. ЗАКОНИ ЧАСТОТНОГО КЕРУВАННЯ ВЧХ користувача Застосування: реализація особливих умов та вимог до вольт-частотної характеристики
- 13. СКАЛЯРНЕ КЕРУВАННЯ АІН з амплітудною модуляцією АІН з широтно-імпульсною модуляцією Регулювання напруги (струму) та частоти Недоліки:
- 14. . Векторне керування, принцип, особливості
- 15. Векторне керування, режими АД
- 16. Векторне керування приклад структурної схеми
- 17. Векторне керування
- 18. Векторне керування функціональна схема САК (FVC)
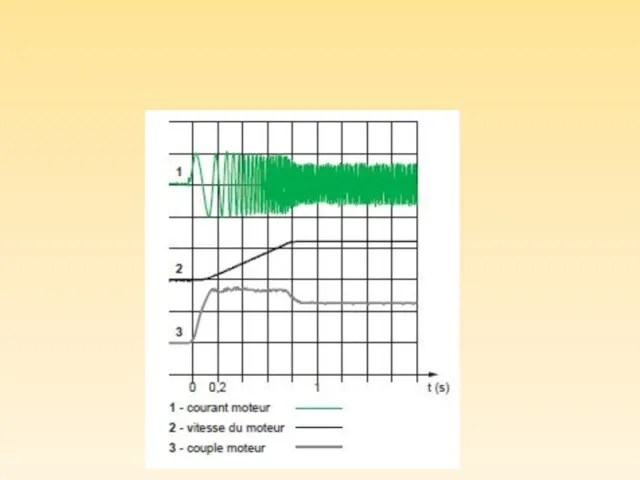
- 19. Векторне керування осцилограми пуску приводу з ПЧ типу ATV58F
- 20. БЕЗДАВАЧЕВЕ ВЕКТОРНЕ КЕРУВАННЯ (Sensorless vector control, SVC) Передумови: трудність вимірювання магнітного потоку Не завжди є можливість
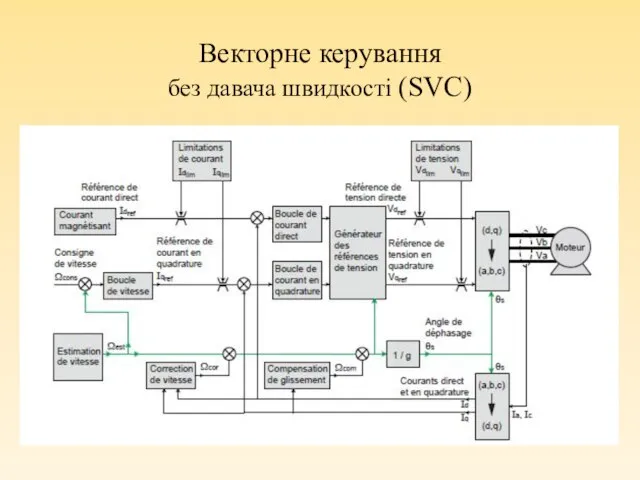
- 21. Векторне керування без давача швидкості (SVC)
- 23. Принцип роботи перетворювачів частоти Принцип формування вихідної напруги: амплітудна та широтно-імпульсна модуляція Способи формування гальмівного режиму
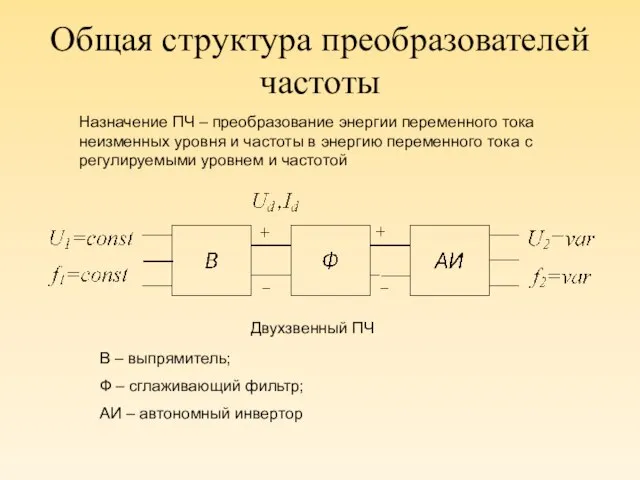
- 24. Общая структура преобразователей частоты В – выпрямитель; Ф – сглаживающий фильтр; АИ – автономный инвертор Назначение
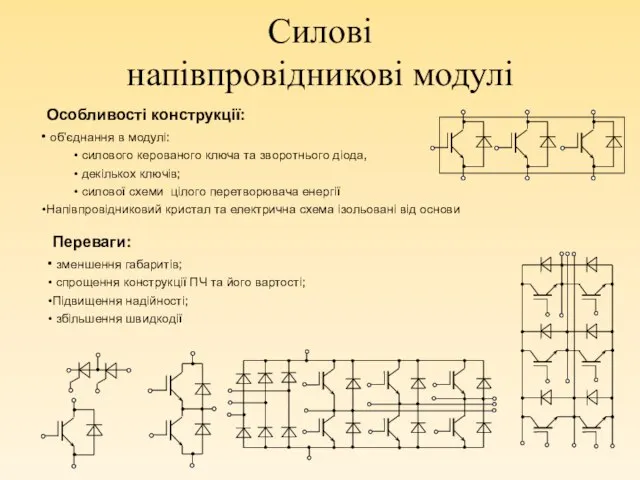
- 25. Силові напівпровідникові модулі Переваги: зменшення габаритів; спрощення конструкції ПЧ та його вартості; Підвищення надійності; збільшення швидкодії
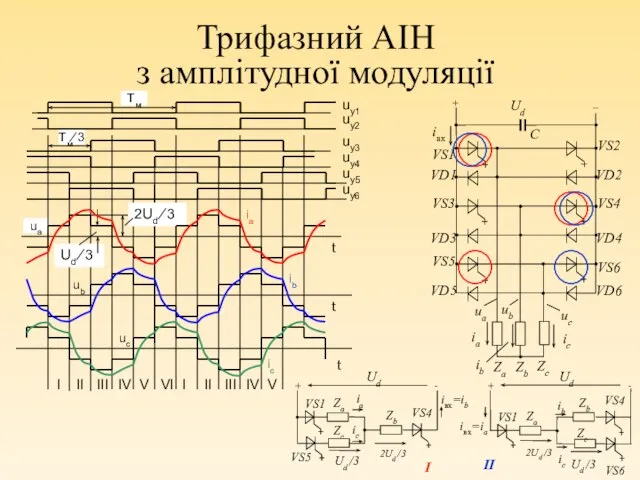
- 27. ua Трифазний АІН з амплітудної модуляції uу1 uу2 t Tм uу3 uу4 uу5 uу6 ub uc
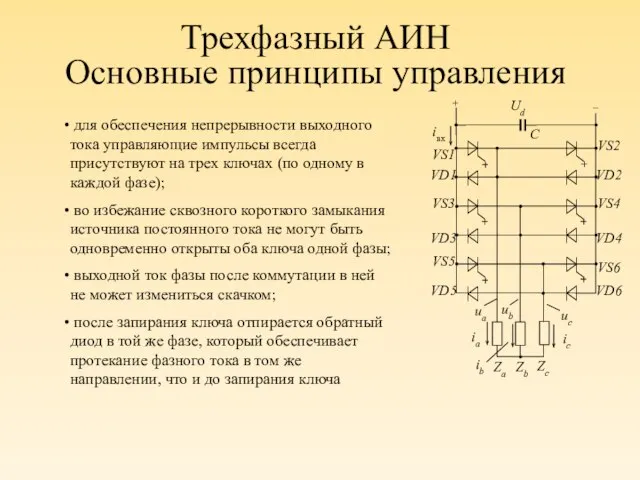
- 28. Трехфазный АИН Основные принципы управления для обеспечения непрерывности выходного тока управляющие импульсы всегда присутствуют на трех
- 29. Амплітудна модуляція в ПЧ Переваги: простота алгоритму керування інвертором малі втрати в ключах інвертора Недоліки: необхідність
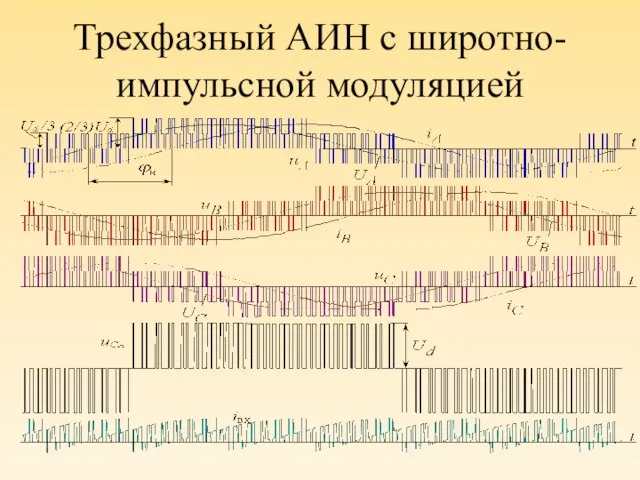
- 30. Трехфазный АИН с широтно-импульсной модуляцией
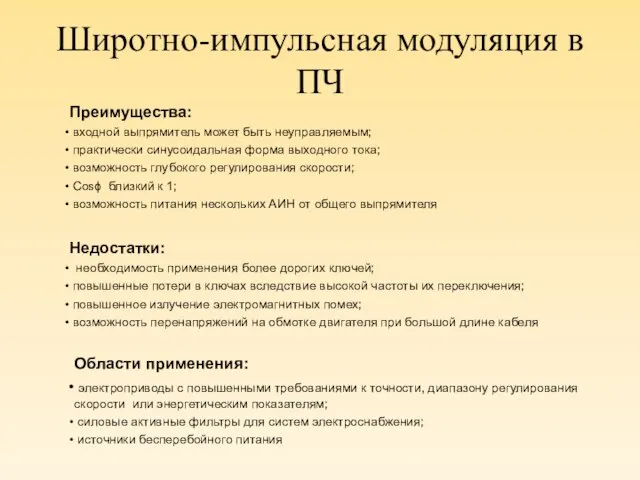
- 31. Широтно-импульсная модуляция в ПЧ Преимущества: входной выпрямитель может быть неуправляемым; практически синусоидальная форма выходного тока; возможность
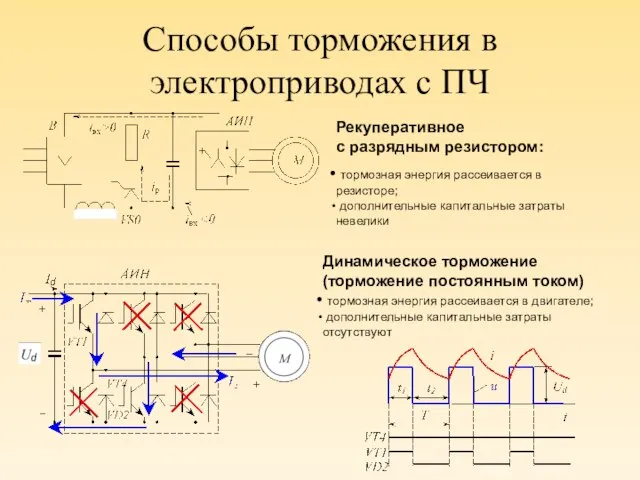
- 32. Способы торможения в электроприводах с ПЧ Рекуперативное с возвратом энергии в сеть: энергосбережение; дополнительные капитальные затраты
- 33. Способы торможения в электроприводах с ПЧ Динамическое торможение (торможение постоянным током) тормозная энергия рассеивается в двигателе;
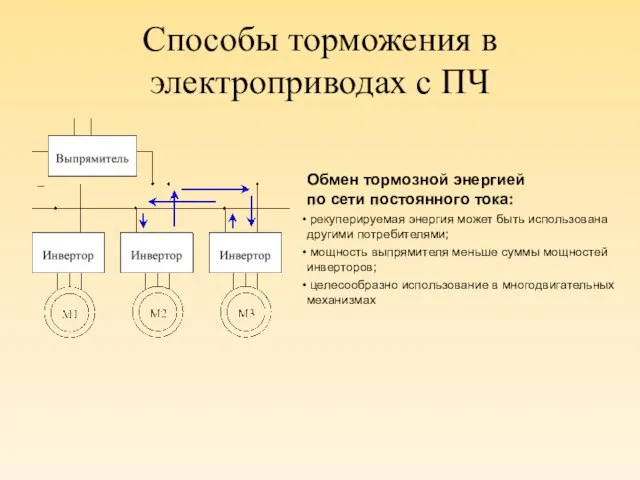
- 34. Способы торможения в электроприводах с ПЧ Обмен тормозной энергией по сети постоянного тока: рекуперируемая энергия может
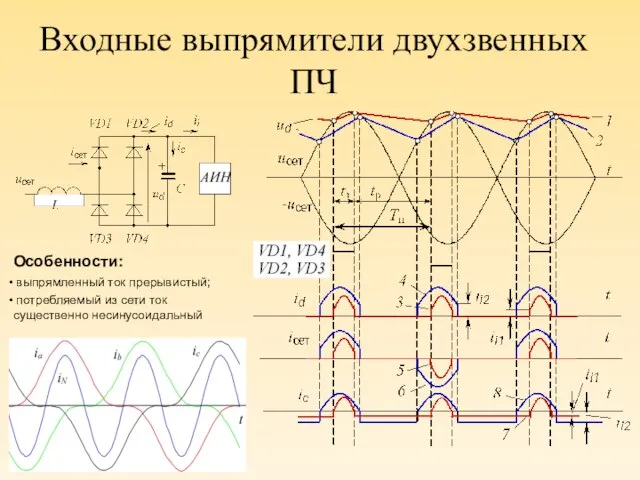
- 35. Входные выпрямители двухзвенных ПЧ Особенности: выпрямленный ток прерывистый; потребляемый из сети ток существенно несинусоидальный
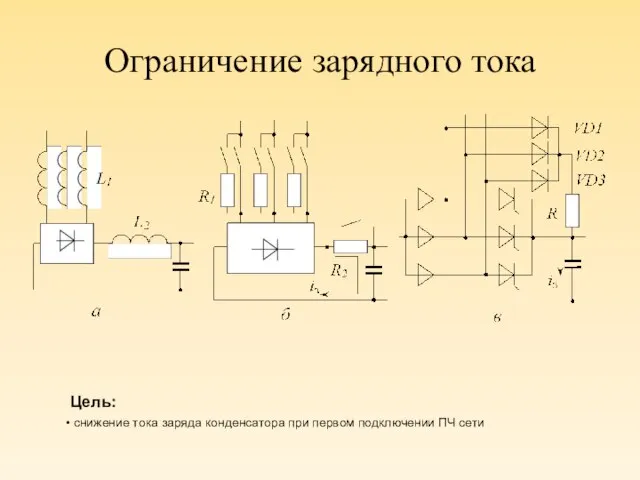
- 36. Ограничение зарядного тока Цель: снижение тока заряда конденсатора при первом подключении ПЧ сети
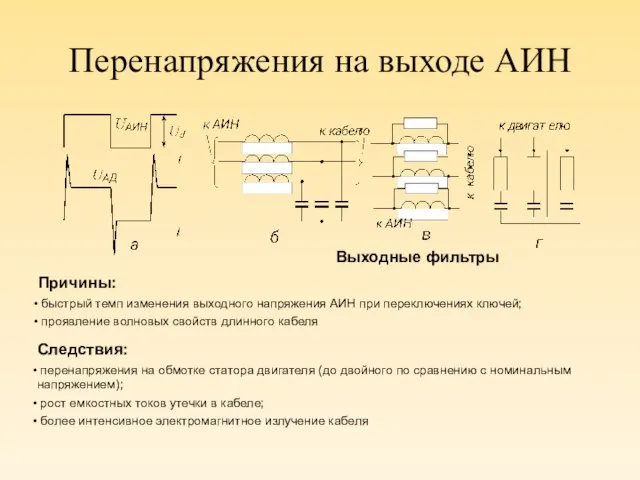
- 37. Перенапряжения на выходе АИН Причины: быстрый темп изменения выходного напряжения АИН при переключениях ключей; проявление волновых
- 38. ТРЕБОВАНИЯ К ПЧ регулирование (как согласованное, так и раздельное) частоты и уровня выходного напряжения в широких
- 39. ЗАДАЧИ СИСТЕМ УПРАВЛЕНИЯ СОВРЕМЕННЫХ ПЧ формирование логических сигналов управления ключами (т.е. управление самим ПЧ); управление координатами
- 40. РАЗВИТИЕ ПЧ
- 41. Структурна схема електроприводу ATV71 Силовая секция Контроллер управления двигателем Контроллер прикладных задач
- 42. Функціональна схема Altivar
- 43. Прості механізми Установки кондиц. та вентиляцыъ Складні механізми ATV11 0,18- 2,2 кВт ATV31 0,18-15 кВт ATV71
- 44. Оновні функціональні можливості електроприводів Altivar Формування статичних та динамічних характеристик електроприводу( механізму) Формування команд та режимів
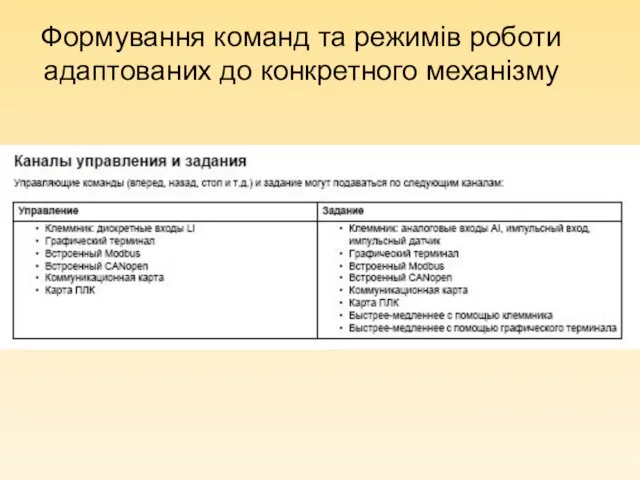
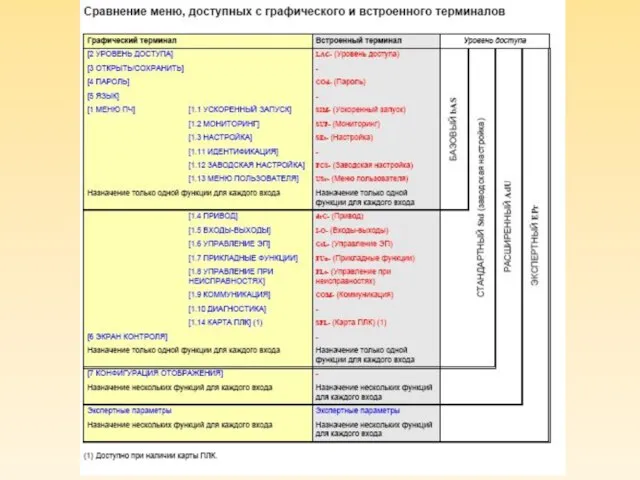
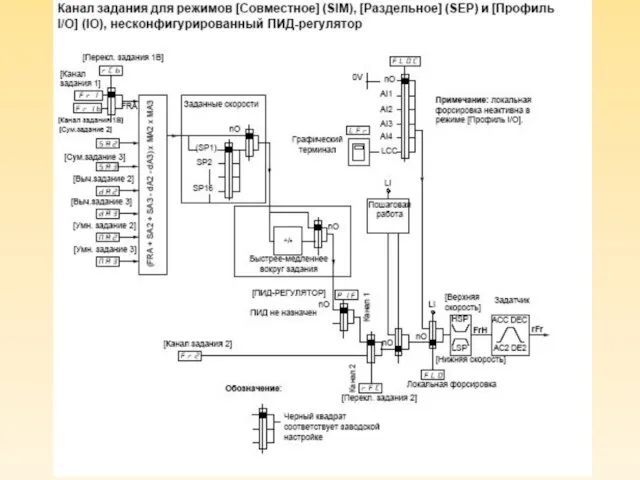
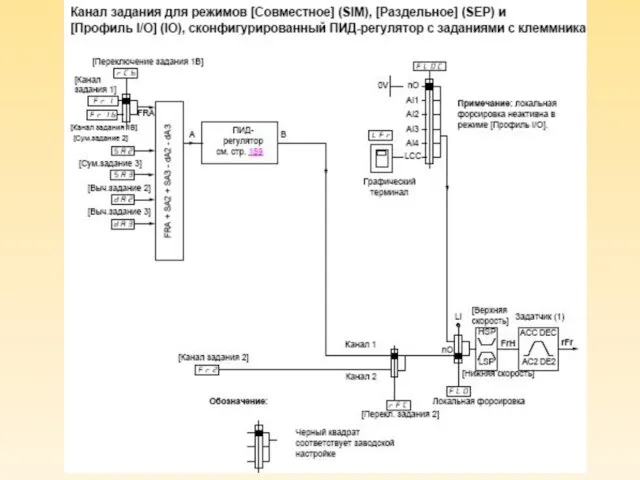
- 45. Формування команд та режимів роботи адаптованих до конкретного механізму
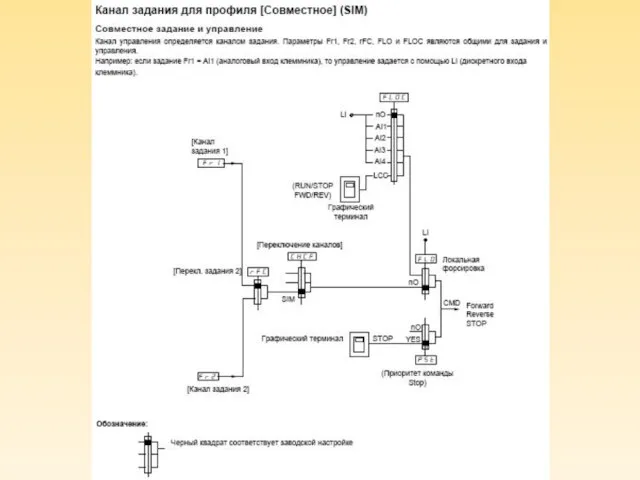
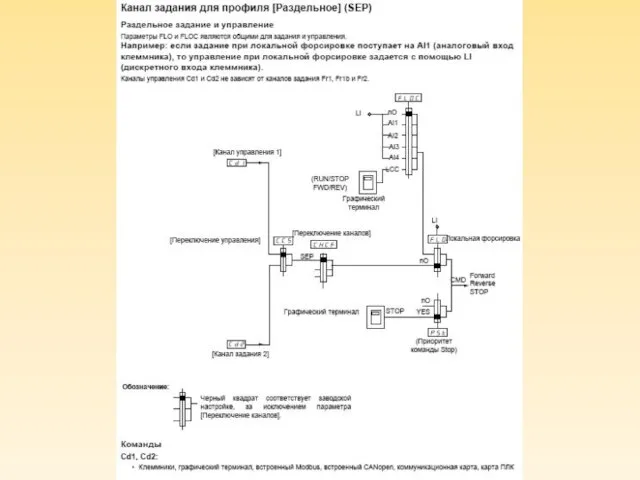
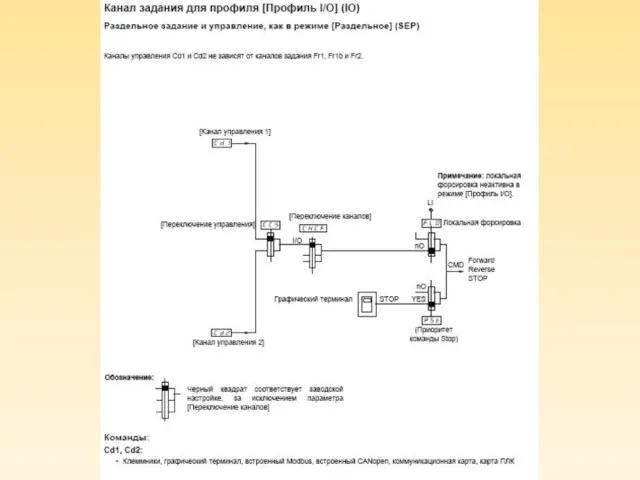
- 52. Застосування макро-конфігурацій (ATV71) або спеціальних функцій (ATV31, ATV71) Застосування вільно програмованої плати(ATV71) або спеціальних прикладних плат
- 53. Пуск/стоп (заводське налаштування) Транспортування Загальне застосування Підйомно-транспортні механізми ПІД-регулятор Комунікація Ведучий/ведений Застосування макро-конфігурацій ( ATV71)
- 54. Проблемно-орієнтований електропривод ATV61 Орієнтований на застосування для механізмів з вентиляторною характеристикою ЗАБЕЗПЕЧУЄ: - ПІД-регулювання технологічного параметра
- 55. Проблема електромагнітної сумісності ПЧ Поняття про ЕМС Характеристика електромагнітних завад Вплив ПЧ на мережу Вплив ПЧ
- 56. ЕМС –це можливість використання пристрою чи системи в електромагнітному середовищі без створення недопустимых для оточення чи
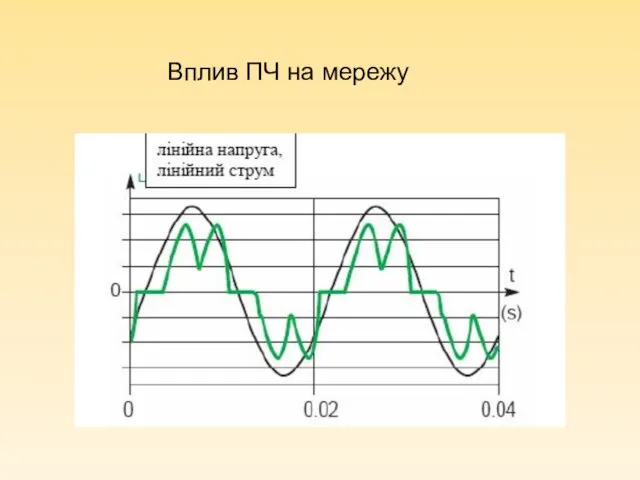
- 57. Вплив ПЧ на мережу
- 58. Спектральний склад гармонік струму
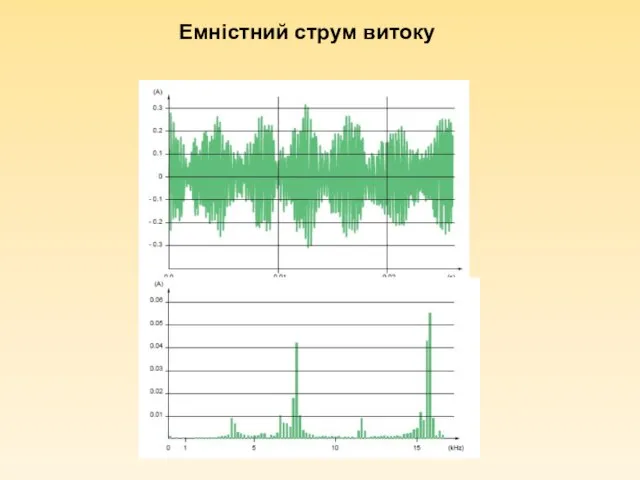
- 59. Емністний струм витоку
- 60. Емністний струм витоку
- 61. Засоби зменшення впливу ПЧ на мережу Використання мережного дроселя Використання дроселя постійного струму Використання додаткового вхідного
- 62. Вплив ПЧ на двигун Проблема градієнту dU/dt Проблема довгого кабелю
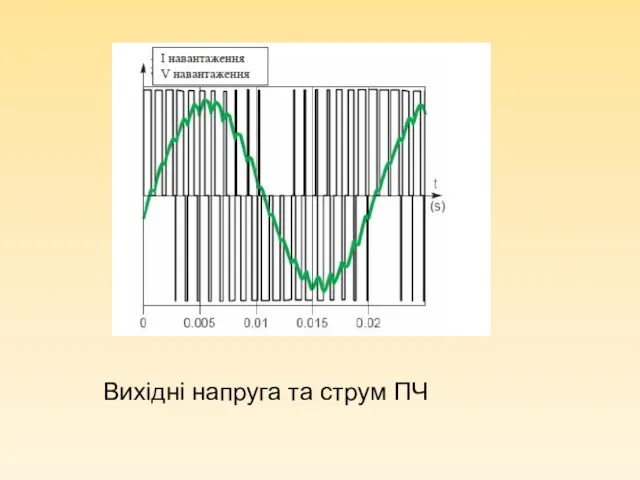
- 63. Вихідні напруга та струм ПЧ
- 64. Наслідки такої вихідної напруги ПЧ: Виникнення хвильових процесів у кабелі та явища накладання падаючої та відбитої
- 65. Засоби для зменшення впливу ПЧ на двигун Використання дроселя двигуна Використання вихідного фільтра (у тому числі
- 66. Проблема захисту ПЧ Види захисту Поняття про координацію комутаційної апаратури
- 67. Мета координації Захистити обслуговуючий персонал та установку при виникненні будь-яких аварійних струмів (перевантаження або струми к.з.)
- 68. Координація захисту Ідея координації у стандарті МЕК 947 Пріоритет захисту персоналу та обладнання Не повинно бути
- 69. МЕК 947: 3 рівня координації Координація типу 1 (МЕК 947-4-1) Координація типу 2 (МЕК 947-4-1) Координація
- 70. Координація типу 1 (МЕК 947-4-1) Ніякої небезпеки для персоналу та установки Контактор та/або реле можуть бути
- 71. Координація типу 2 МЕК 947-4-1 Ніякої небезпеки для персоналу та обладнання. Не допускається ніякого пошкодження апаратури.
- 73. Скачать презентацию
Слайд 2Зміст
Основи теорії частотного керування асинхронними електроприводами
Принцип роботи асинхронного двигуна, основні співвідношення
Закони
Зміст
Основи теорії частотного керування асинхронними електроприводами
Принцип роботи асинхронного двигуна, основні співвідношення
Закони
Слайд 3Основи теорії частотного керування асинхронними електроприводами
Принцип роботи асинхронного двигуна,
основні співвідношення
Закони частотного
Основи теорії частотного керування асинхронними електроприводами
Принцип роботи асинхронного двигуна,
основні співвідношення
Закони частотного
Слайд 4КОНСТРУКЦІЯ АСИНХРОННИХ ДВИГУНІВ
КОНСТРУКЦІЯ АСИНХРОННИХ ДВИГУНІВ

Слайд 5ПРИНЦИП РОБОТИ АСИНХРОННОГО ДВИГУНА
Створення магнітного поля
(3 катушки)
iA=Imsinωt
iB=Imsin(ωt-120º)
iC=Imsin(ωt-240º)
A
B
C
120º
240º
ПРИНЦИП РОБОТИ АСИНХРОННОГО ДВИГУНА
Створення магнітного поля
(3 катушки)
iA=Imsinωt
iB=Imsin(ωt-120º)
iC=Imsin(ωt-240º)
A
B
C
120º
240º

Слайд 6ПРИНЦИП РОБОТИ АСИНХРОННОГО ДВИГУНА
Формування момента
Магнітне поле статора
Струми у роторі
Магнітне поле ротора
Струми у
ПРИНЦИП РОБОТИ АСИНХРОННОГО ДВИГУНА
Формування момента
Магнітне поле статора
Струми у роторі
Магнітне поле ротора
Струми у
Слайд 7МЕХАНІЧНА ХАРАКТЕРИСТИКА АД
Mk
ω0
Mп
(1-sk)ω0
Режим двигуна
Режим противмикання
Рекуперативний режим
Ділянка нестійкого режиму роботи
Гілка стійкої роботи
МЕХАНІЧНА ХАРАКТЕРИСТИКА АД
Mk
ω0
Mп
(1-sk)ω0
Режим двигуна
Режим противмикання
Рекуперативний режим
Ділянка нестійкого режиму роботи
Гілка стійкої роботи
Слайд 8ЗАКОНИ ЧАСТОТНОГО КЕРУВАННЯ
Uн
fн
fmax
U1
Mk
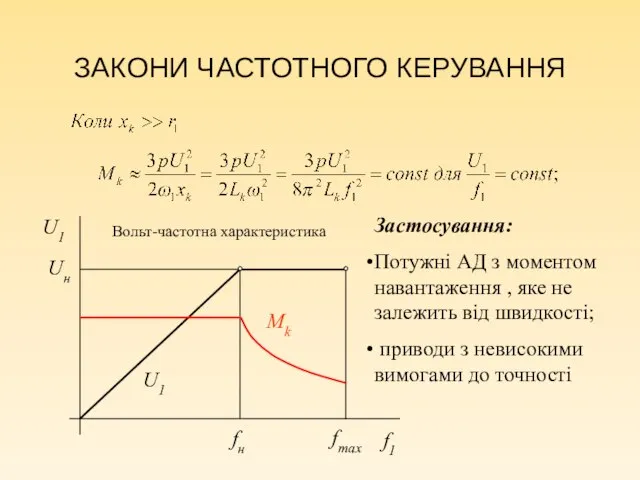
Застосування:
Потужні АД з моментом навантаження , яке не залежить від
ЗАКОНИ ЧАСТОТНОГО КЕРУВАННЯ
Uн
fн
fmax
U1
Mk
Застосування:
Потужні АД з моментом навантаження , яке не залежить від
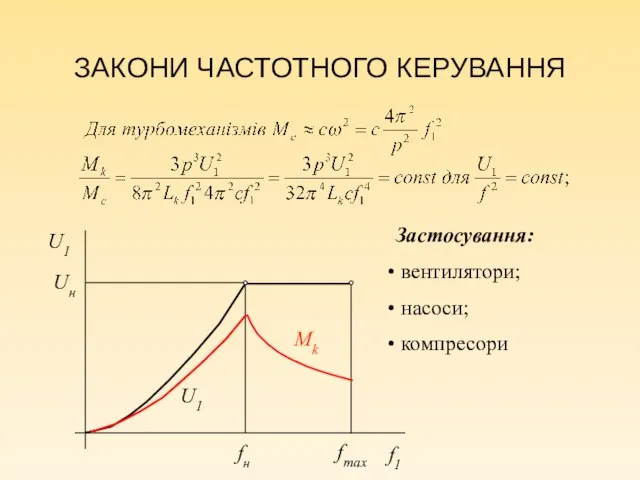
Слайд 9ЗАКОНИ ЧАСТОТНОГО КЕРУВАННЯ
Застосування:
вентилятори;
насоси;
компресори
ЗАКОНИ ЧАСТОТНОГО КЕРУВАННЯ
Застосування:
вентилятори;
насоси;
компресори
Слайд 10ЗАКОНИ ЧАСТОТНОГО КЕРУВАННЯ
Uн
fн
fmax
U1
Mk
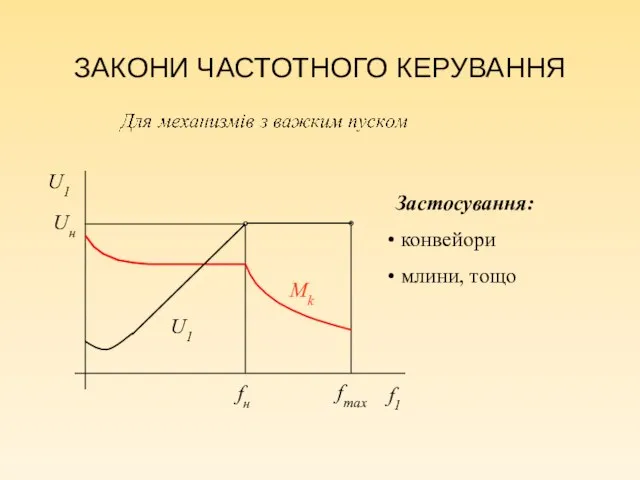
Застосування:
конвейори
млини, тощо
ЗАКОНИ ЧАСТОТНОГО КЕРУВАННЯ
Uн
fн
fmax
U1
Mk
Застосування:
конвейори
млини, тощо
Слайд 11ЗАКОНИ ЧАСТОТНОГО КЕРУВАННЯ
Uн
fн
fmax
Застосування:
двигуни малої потужності
IR-компенсація
f1=50 Гц
f1=25 Гц
f1=12 Гц
ЗАКОНИ ЧАСТОТНОГО КЕРУВАННЯ
Uн
fн
fmax
Застосування:
двигуни малої потужності
IR-компенсація
f1=50 Гц
f1=25 Гц
f1=12 Гц

Слайд 12ЗАКОНИ ЧАСТОТНОГО КЕРУВАННЯ
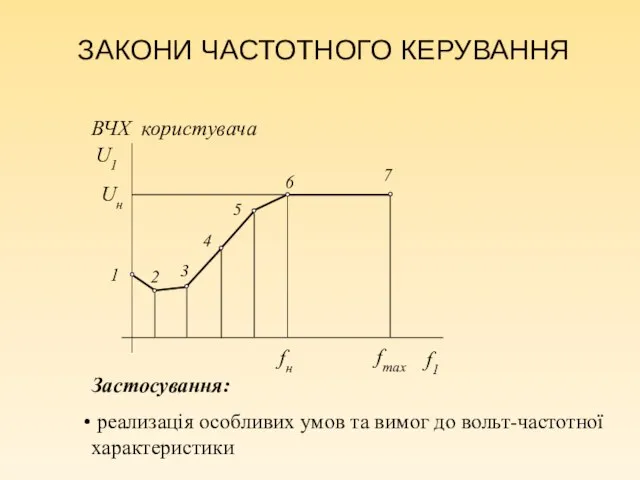
ВЧХ користувача
Застосування:
реализація особливих умов та вимог до вольт-частотної характеристики
ЗАКОНИ ЧАСТОТНОГО КЕРУВАННЯ
ВЧХ користувача
Застосування:
реализація особливих умов та вимог до вольт-частотної характеристики
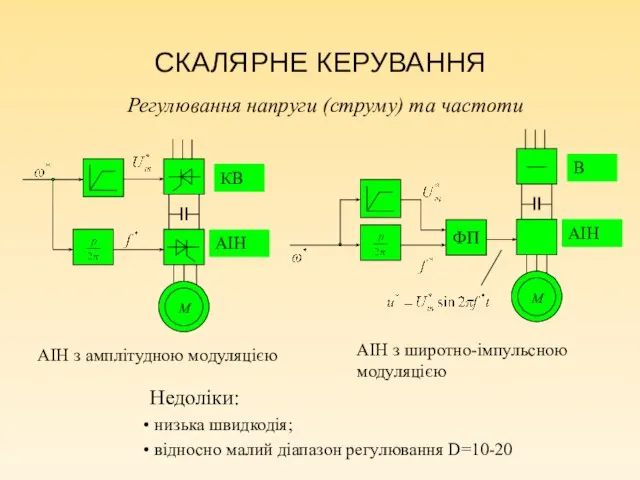
Слайд 13СКАЛЯРНЕ КЕРУВАННЯ
АІН з амплітудною модуляцією
АІН з широтно-імпульсною модуляцією
Регулювання напруги (струму) та частоти
Недоліки:
СКАЛЯРНЕ КЕРУВАННЯ
АІН з амплітудною модуляцією
АІН з широтно-імпульсною модуляцією
Регулювання напруги (струму) та частоти
Недоліки:
Слайд 14.
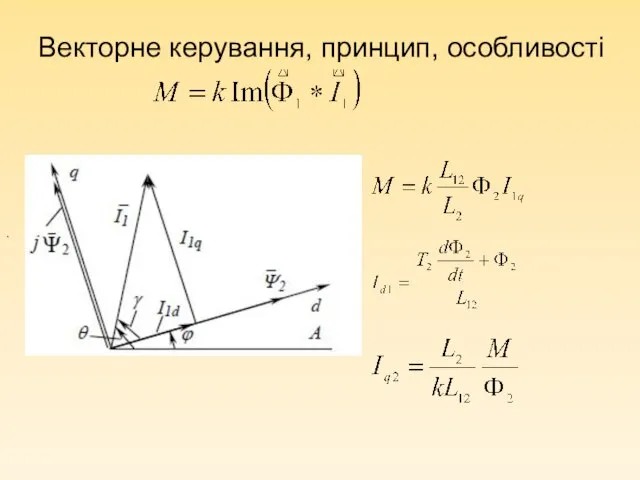
Векторне керування, принцип, особливості
.
Векторне керування, принцип, особливості
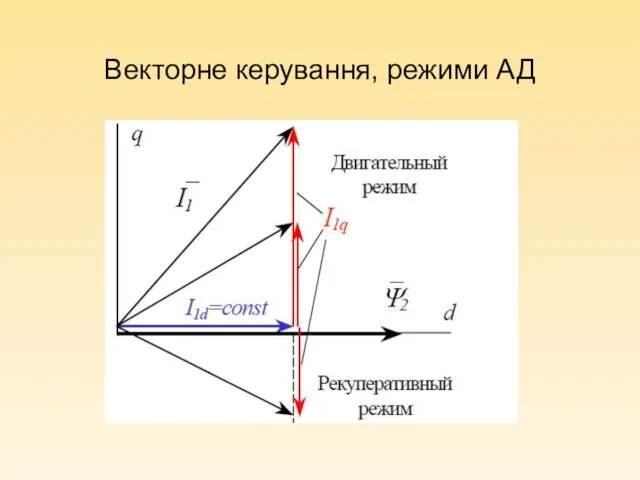
Слайд 15Векторне керування, режими АД
Векторне керування, режими АД
Слайд 16Векторне керування
приклад структурної схеми
Векторне керування
приклад структурної схеми

Слайд 17Векторне керування
Векторне керування

Слайд 18Векторне керування
функціональна схема САК (FVC)
Векторне керування
функціональна схема САК (FVC)

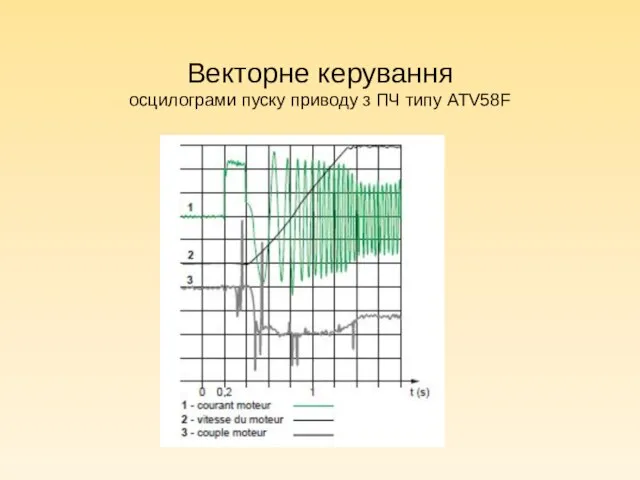
Слайд 19Векторне керування
осцилограми пуску приводу з ПЧ типу ATV58F
Векторне керування
осцилограми пуску приводу з ПЧ типу ATV58F
Слайд 20БЕЗДАВАЧЕВЕ ВЕКТОРНЕ КЕРУВАННЯ
(Sensorless vector control, SVC)
Передумови:
трудність вимірювання магнітного потоку
Не завжди є
БЕЗДАВАЧЕВЕ ВЕКТОРНЕ КЕРУВАННЯ
(Sensorless vector control, SVC)
Передумови:
трудність вимірювання магнітного потоку
Не завжди є
Слайд 21Векторне керування
без давача швидкості (SVC)
Векторне керування
без давача швидкості (SVC)
Слайд 23Принцип роботи перетворювачів частоти
Принцип формування вихідної напруги: амплітудна та широтно-імпульсна модуляція
Способи формування
Принцип роботи перетворювачів частоти
Принцип формування вихідної напруги: амплітудна та широтно-імпульсна модуляція
Способи формування
Слайд 24Общая структура преобразователей частоты
В – выпрямитель;
Ф – сглаживающий фильтр;
АИ – автономный инвертор
Назначение
Общая структура преобразователей частоты
В – выпрямитель;
Ф – сглаживающий фильтр;
АИ – автономный инвертор
Назначение
Слайд 25Силові
напівпровідникові модулі
Переваги:
зменшення габаритів;
спрощення конструкції ПЧ та його вартості;
Підвищення надійності;
Силові
напівпровідникові модулі
Переваги:
зменшення габаритів;
спрощення конструкції ПЧ та його вартості;
Підвищення надійності;

Слайд 27ua
Трифазний АІН
з амплітудної модуляції
uу1
uу2
t
Tм
uу3
uу4
uу5
uу6
ub
uc
ia
ib
ic
t
t
Tм⁄ 3
Ud ⁄ 3
2Ud ⁄ 3
I
II
III
IV
V
VI
I
II
III
IV
V
ua
Трифазний АІН
з амплітудної модуляції
uу1
uу2
t
Tм
uу3
uу4
uу5
uу6
ub
uc
ia
ib
ic
t
t
Tм⁄ 3
Ud ⁄ 3
2Ud ⁄ 3
I
II
III
IV
V
VI
I
II
III
IV
V
Слайд 28Трехфазный АИН
Основные принципы управления
для обеспечения непрерывности выходного тока управляющие импульсы
Трехфазный АИН
Основные принципы управления
для обеспечения непрерывности выходного тока управляющие импульсы
Слайд 29Амплітудна модуляція в ПЧ
Переваги:
простота алгоритму керування інвертором
малі втрати в ключах
Амплітудна модуляція в ПЧ
Переваги:
простота алгоритму керування інвертором
малі втрати в ключах
Слайд 30Трехфазный АИН с широтно-импульсной модуляцией
Трехфазный АИН с широтно-импульсной модуляцией
Слайд 31Широтно-импульсная модуляция в ПЧ
Преимущества:
входной выпрямитель может быть неуправляемым;
практически синусоидальная форма
Широтно-импульсная модуляция в ПЧ
Преимущества:
входной выпрямитель может быть неуправляемым;
практически синусоидальная форма
Слайд 32Способы торможения в электроприводах с ПЧ
Рекуперативное с возвратом энергии в сеть:
энергосбережение;
Способы торможения в электроприводах с ПЧ
Рекуперативное с возвратом энергии в сеть:
энергосбережение;

Слайд 33Способы торможения в электроприводах с ПЧ
Динамическое торможение (торможение постоянным током)
тормозная энергия
Способы торможения в электроприводах с ПЧ
Динамическое торможение (торможение постоянным током)
тормозная энергия
Слайд 34Способы торможения в электроприводах с ПЧ
Обмен тормозной энергией
по сети постоянного тока:
Способы торможения в электроприводах с ПЧ
Обмен тормозной энергией
по сети постоянного тока:
Слайд 35Входные выпрямители двухзвенных ПЧ
Особенности:
выпрямленный ток прерывистый;
потребляемый из сети ток существенно
Входные выпрямители двухзвенных ПЧ
Особенности:
выпрямленный ток прерывистый;
потребляемый из сети ток существенно
Слайд 36Ограничение зарядного тока
Цель:
снижение тока заряда конденсатора при первом подключении ПЧ сети
Ограничение зарядного тока
Цель:
снижение тока заряда конденсатора при первом подключении ПЧ сети
Слайд 37Перенапряжения на выходе АИН
Причины:
быстрый темп изменения выходного напряжения АИН при переключениях
Перенапряжения на выходе АИН
Причины:
быстрый темп изменения выходного напряжения АИН при переключениях
Слайд 38ТРЕБОВАНИЯ К ПЧ
регулирование (как согласованное, так и раздельное) частоты и уровня выходного
ТРЕБОВАНИЯ К ПЧ
регулирование (как согласованное, так и раздельное) частоты и уровня выходного
Слайд 39ЗАДАЧИ СИСТЕМ УПРАВЛЕНИЯ СОВРЕМЕННЫХ ПЧ
формирование логических сигналов управления ключами (т.е. управление
ЗАДАЧИ СИСТЕМ УПРАВЛЕНИЯ СОВРЕМЕННЫХ ПЧ
формирование логических сигналов управления ключами (т.е. управление
Слайд 40РАЗВИТИЕ ПЧ
РАЗВИТИЕ ПЧ

Слайд 41Структурна схема електроприводу ATV71
Силовая
секция
Контроллер
управления
двигателем
Контроллер прикладных задач
Структурна схема електроприводу ATV71
Силовая
секция
Контроллер
управления
двигателем
Контроллер прикладных задач

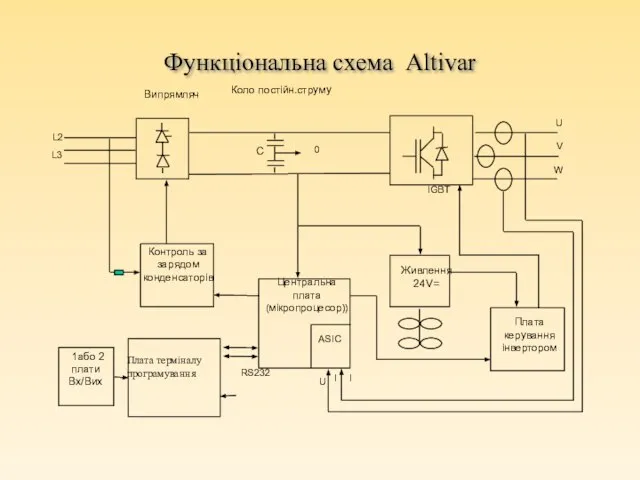
Слайд 42Функціональна схема Altivar
Функціональна схема Altivar
Слайд 43Прості механізми
Установки кондиц. та вентиляцыъ
Складні механізми
ATV11
0,18- 2,2 кВт
ATV31
0,18-15 кВт
ATV71
0,37-500 кВт
ATS01
1,1-75кВт
ATS48
4
Прості механізми
Установки кондиц. та вентиляцыъ
Складні механізми
ATV11
0,18- 2,2 кВт
ATV31
0,18-15 кВт
ATV71
0,37-500 кВт
ATS01
1,1-75кВт
ATS48
4

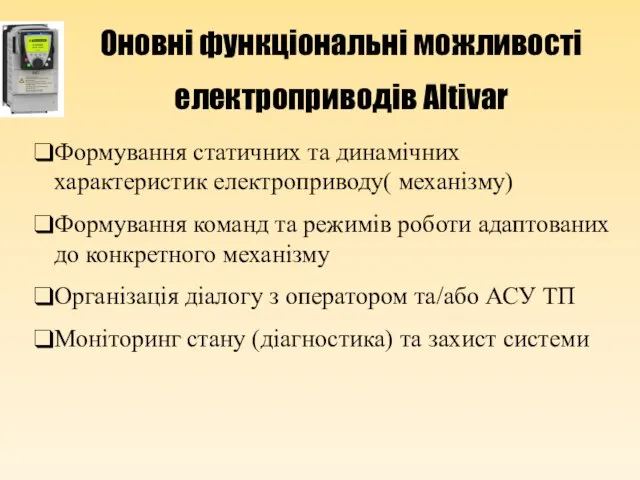
Слайд 44Оновні функціональні можливості
електроприводів Altivar
Формування статичних та динамічних характеристик електроприводу( механізму)
Формування
Оновні функціональні можливості
електроприводів Altivar
Формування статичних та динамічних характеристик електроприводу( механізму)
Формування
Слайд 45Формування команд та режимів роботи адаптованих до конкретного механізму
Формування команд та режимів роботи адаптованих до конкретного механізму
Слайд 52Застосування макро-конфігурацій (ATV71) або спеціальних функцій (ATV31, ATV71)
Застосування вільно програмованої плати(ATV71) або
Застосування вільно програмованої плати(ATV71) або
Слайд 53Пуск/стоп (заводське налаштування)
Транспортування
Загальне застосування
Підйомно-транспортні механізми
ПІД-регулятор
Комунікація
Ведучий/ведений
Застосування макро-конфігурацій
( ATV71)
Пуск/стоп (заводське налаштування)
Транспортування
Загальне застосування
Підйомно-транспортні механізми
ПІД-регулятор
Комунікація
Ведучий/ведений
Застосування макро-конфігурацій
( ATV71)
Слайд 54Проблемно-орієнтований електропривод ATV61
Орієнтований на застосування для механізмів з вентиляторною характеристикою
ЗАБЕЗПЕЧУЄ:
-
Проблемно-орієнтований електропривод ATV61
Орієнтований на застосування для механізмів з вентиляторною характеристикою
ЗАБЕЗПЕЧУЄ:
-
Слайд 55
Проблема електромагнітної сумісності ПЧ
Поняття про ЕМС
Характеристика електромагнітних завад
Вплив ПЧ на мережу
Вплив ПЧ
Проблема електромагнітної сумісності ПЧ
Поняття про ЕМС
Характеристика електромагнітних завад
Вплив ПЧ на мережу
Вплив ПЧ
Слайд 56ЕМС –це можливість використання пристрою чи системи в електромагнітному середовищі без створення
ЕМС –це можливість використання пристрою чи системи в електромагнітному середовищі без створення
Слайд 57 Вплив ПЧ на мережу
Вплив ПЧ на мережу
Слайд 58Спектральний склад гармонік струму
Спектральний склад гармонік струму

Слайд 59Емністний струм витоку
Емністний струм витоку

Слайд 60Емністний струм витоку
Емністний струм витоку
Слайд 61Засоби зменшення впливу ПЧ на мережу
Використання мережного дроселя
Використання дроселя постійного
Засоби зменшення впливу ПЧ на мережу
Використання мережного дроселя
Використання дроселя постійного
Слайд 62Вплив ПЧ на двигун
Проблема градієнту dU/dt
Проблема довгого кабелю
Вплив ПЧ на двигун
Проблема градієнту dU/dt
Проблема довгого кабелю
Слайд 63 Вихідні напруга та струм ПЧ
Вихідні напруга та струм ПЧ
Слайд 64Наслідки такої вихідної напруги ПЧ:
Виникнення хвильових процесів у кабелі та явища
Наслідки такої вихідної напруги ПЧ:
Виникнення хвильових процесів у кабелі та явища
Слайд 65Засоби для зменшення впливу ПЧ
на двигун
Використання дроселя двигуна
Використання вихідного
Засоби для зменшення впливу ПЧ
на двигун
Використання дроселя двигуна
Використання вихідного
Слайд 66Проблема захисту ПЧ
Види захисту
Поняття про координацію комутаційної апаратури
Проблема захисту ПЧ
Види захисту
Поняття про координацію комутаційної апаратури
Слайд 67Мета координації
Захистити обслуговуючий персонал та установку при виникненні будь-яких аварійних струмів (перевантаження
Мета координації
Захистити обслуговуючий персонал та установку при виникненні будь-яких аварійних струмів (перевантаження
Слайд 68Координація захисту
Ідея координації у стандарті МЕК 947
Пріоритет захисту персоналу та обладнання
Не повинно
Координація захисту
Ідея координації у стандарті МЕК 947
Пріоритет захисту персоналу та обладнання
Не повинно
Слайд 69МЕК 947: 3 рівня координації
Координація типу 1 (МЕК 947-4-1)
Координація типу 2 (МЕК
МЕК 947: 3 рівня координації
Координація типу 1 (МЕК 947-4-1)
Координація типу 2 (МЕК
Слайд 70Координація типу 1
(МЕК 947-4-1)
Ніякої небезпеки для персоналу та установки
Контактор та/або реле
Координація типу 1
(МЕК 947-4-1)
Ніякої небезпеки для персоналу та установки
Контактор та/або реле
Слайд 71Координація типу 2
МЕК 947-4-1
Ніякої небезпеки для персоналу та обладнання.
Не допускається ніякого пошкодження
Координація типу 2
МЕК 947-4-1
Ніякої небезпеки для персоналу та обладнання.
Не допускається ніякого пошкодження
 Дед мороз И Снегурочка
Дед мороз И Снегурочка Основные теории местного самоуправления Радченко М.Д. Соловьенко К.О.
Основные теории местного самоуправления Радченко М.Д. Соловьенко К.О. «Мониторинг качества образования»
«Мониторинг качества образования» Основные формы финансовой и управленческой отчетности
Основные формы финансовой и управленческой отчетности Либералы, консерваторы, социалисты: какими должно быть общество и государство
Либералы, консерваторы, социалисты: какими должно быть общество и государство Пути совершенствования знаний в области теории перевода
Пути совершенствования знаний в области теории перевода Жизнь и судьба наших четвероногих друзей
Жизнь и судьба наших четвероногих друзей Презентация на тему Равнины и горы России
Презентация на тему Равнины и горы России  Состав студенческого совета на 2018-2019 учебный год
Состав студенческого совета на 2018-2019 учебный год Тестовые задания для зачета
Тестовые задания для зачета Don Juan Tenorio
Don Juan Tenorio Problem-based learnig
Problem-based learnig  День святого Валентина
День святого Валентина Особенности работы учителя по реализации требований ФГОС
Особенности работы учителя по реализации требований ФГОС Інтэр’ер вясковай хаты пачатку XX стагоддзя
Інтэр’ер вясковай хаты пачатку XX стагоддзя Рационально-эмотивно-поведенческая терапия как часть семейства КБТ
Рационально-эмотивно-поведенческая терапия как часть семейства КБТ Презентация на тему Игра "Регулировщик"
Презентация на тему Игра "Регулировщик" Президентские спортивные игры
Президентские спортивные игры Теория институтов и институциональных изменений
Теория институтов и институциональных изменений Healthy skin bundle landing
Healthy skin bundle landing Площадь прямоугольника 8 класс
Площадь прямоугольника 8 класс МЕТОДЫ ЭКСПЕРТНЫХ ОЦЕНОК
МЕТОДЫ ЭКСПЕРТНЫХ ОЦЕНОК Презентация на тему Социальные и философские истоки бунта Раскольникова в романе Достоевского Преступление и наказание
Презентация на тему Социальные и философские истоки бунта Раскольникова в романе Достоевского Преступление и наказание Азбука театра
Азбука театра Что такое информация?
Что такое информация? маркетинг 3
маркетинг 3 Почему мы спим ночью? (1 класс)
Почему мы спим ночью? (1 класс) Персональный компьютер
Персональный компьютер