Типовая текущая ситуация - декомпозиция/композиция на программном уровне представления физической области: - либо ручном режим с
- Типовая текущая ситуация - декомпозиция/композиция на программном уровне представления физической области: - либо ручном режим с

Содержание
- 2. Метод решения Стандартизация интерфейсов для объектов, из которых собирается модель, и их связей. Суть предлагаемого решения
- 3. Текущее состояние разработки В настоящий момент отлаживается третья версия системы OST (Objects –Space – Time) на
- 5. Главная проблема: Джон Хэннеси, президент Стэнфордского университета – “… когда мы начинаем говорить о параллелизме и
- 6. Миф о последовательном характере большинства решаемых задач Уровни представления физической области: Физическая модель -> Математическая модель
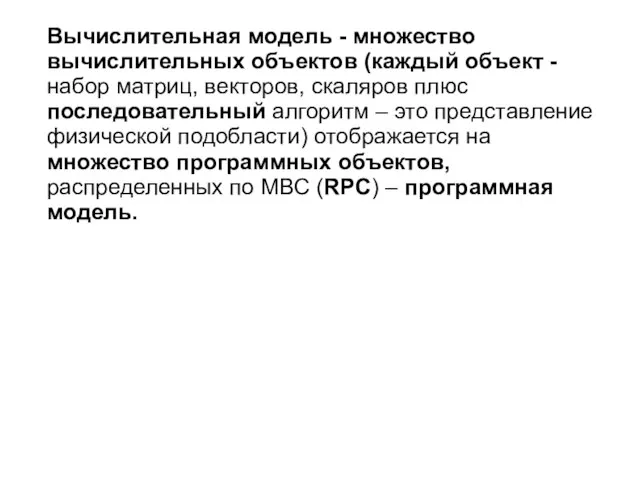
- 7. Вычислительная модель - множество вычислительных объектов (каждый объект - набор матриц, векторов, скаляров плюс последовательный алгоритм
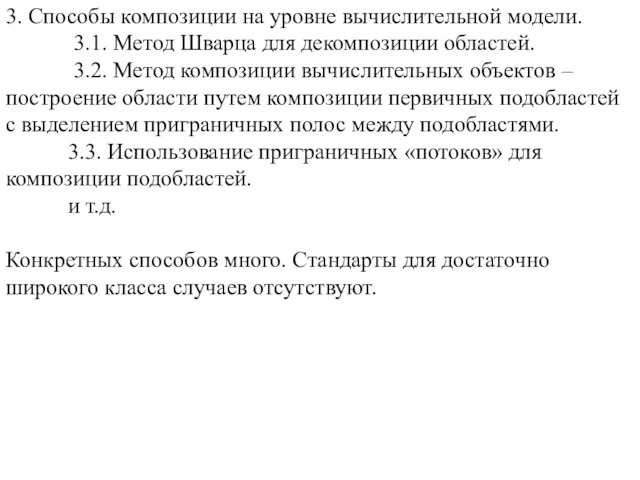
- 8. 3. Способы композиции на уровне вычислительной модели. 3.1. Метод Шварца для декомпозиции областей. 3.2. Метод композиции
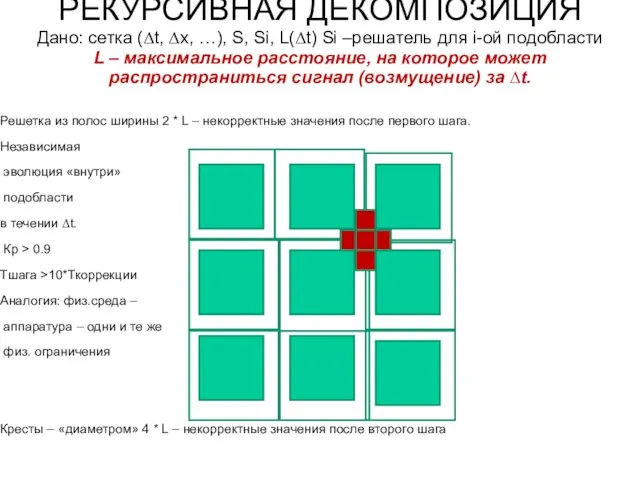
- 9. РЕКУРСИВНАЯ ДЕКОМПОЗИЦИЯ Дано: сетка (∆t, ∆x, …), S, Si, L(∆t) Si –решатель для i-ой подобласти L
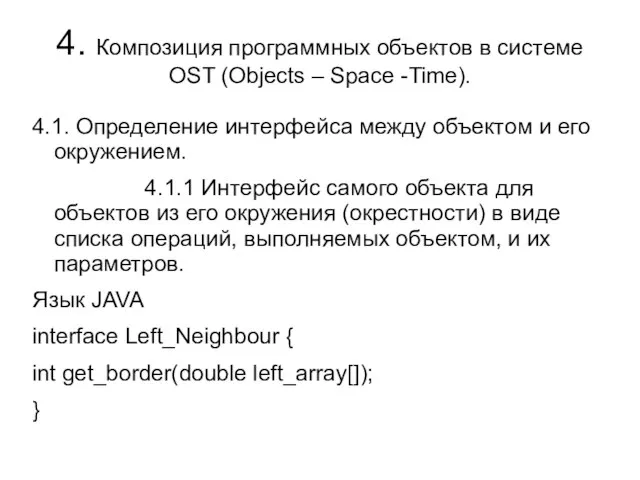
- 10. 4. Композиция программных объектов в системе OST (Objects – Space -Time). 4.1. Определение интерфейса между объектом
- 11. 4.1.2. Интерфейс окружения для объекта в виде “списка формальных соседей” - объектов с их интерфейсами. (Left_Neighbour
- 12. Пример прикладного класса Язык Python class objectExampe(OST_Object_Abstract): double left_array[]; def run(): #вызов метода в соседе self.Left_Neighbors.
- 13. Топология связей между объектами. Определение связей между объектами через локальное описание окрестности для каждого объекта. Автоматическая
- 14. Примеры связей
- 15. Окрестность узла Окрестность - узлы, с которыми соединен данный узел. Узлы можно отожествить с вычислительными объектами
- 16. Локальная топология Локальная топология – это топология, описывающая множество соседей для данного вычислительного объекта в локальных
- 17. Пример: целочисленная решетка Координаты соседей отличаются на ±1 по одной из координат
- 18. Пример: плоскость Соседи удалены не более, чем на r: | x – y | ≤ r
- 19. Пример: неструктурированная сетка Все вершины графа пронумерованы 1,2,3,… Для каждого узла явное описание списка соседей Простое
- 20. Пример: кольцо Кольцо объединяет в себе 2 вида локальных топологий N – 1 одинаковых одномерных 1
- 21. Базовая топология – связный граф Случай неструктурированной сетки #Создание объектов в функции инициирования модели for :
- 22. Результаты счета, оценка эффективности
- 23. Что конструктивно новое Формализация «окружения» объекта в виде списка формальных соседей. Автоматическое построение связей между объектами
- 24. Технические характеристики 1. Коэффициент эффективности параллельного счета Кр > 0.9 2. Практически автоматическая сборка (установление связей,
- 25. 5. Хранения множества объектов программной модели в файле объектов (базе данных). Контрольные точки и рестарты. Мобильность
- 27. Скачать презентацию
Слайд 2Метод решения
Стандартизация интерфейсов для объектов, из которых собирается модель, и их связей.
Суть
Метод решения
Стандартизация интерфейсов для объектов, из которых собирается модель, и их связей.
Суть
Слайд 3Текущее состояние разработки
В настоящий момент отлаживается третья версия системы OST (Objects –Space
Текущее состояние разработки
В настоящий момент отлаживается третья версия системы OST (Objects –Space

Слайд 5Главная проблема: Джон Хэннеси, президент Стэнфордского университета –
“… когда мы начинаем
Главная проблема: Джон Хэннеси, президент Стэнфордского университета –
“… когда мы начинаем
Слайд 6Миф о последовательном характере большинства решаемых задач
Уровни представления физической области:
Физическая модель ->
Миф о последовательном характере большинства решаемых задач
Уровни представления физической области:
Физическая модель ->
Слайд 7Вычислительная модель - множество вычислительных объектов (каждый объект - набор матриц, векторов,
Вычислительная модель - множество вычислительных объектов (каждый объект - набор матриц, векторов,
Слайд 83. Способы композиции на уровне вычислительной модели.
3.1. Метод Шварца для декомпозиции
3. Способы композиции на уровне вычислительной модели.
3.1. Метод Шварца для декомпозиции
Слайд 9РЕКУРСИВНАЯ ДЕКОМПОЗИЦИЯ
Дано: сетка (∆t, ∆x, …), S, Si, L(∆t) Si –решатель для
РЕКУРСИВНАЯ ДЕКОМПОЗИЦИЯ Дано: сетка (∆t, ∆x, …), S, Si, L(∆t) Si –решатель для
Слайд 104. Композиция программных объектов в системе OST (Objects – Space -Time).
4.1. Определение
4. Композиция программных объектов в системе OST (Objects – Space -Time).
4.1. Определение
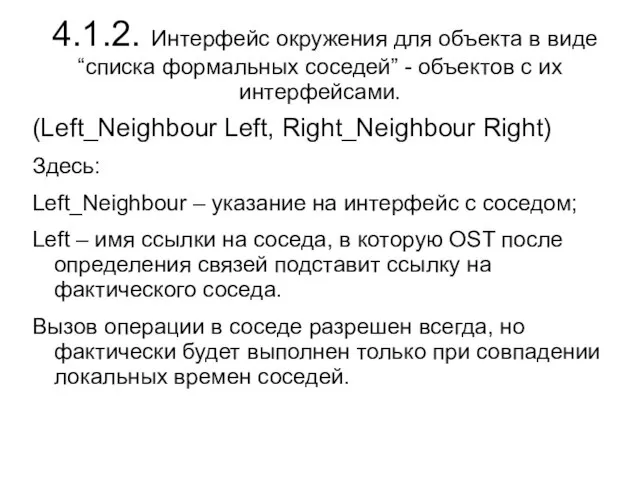
Слайд 11 4.1.2. Интерфейс окружения для объекта в виде “списка формальных соседей” -
4.1.2. Интерфейс окружения для объекта в виде “списка формальных соседей” -
Слайд 12Пример прикладного класса
Язык Python
class objectExampe(OST_Object_Abstract):
double left_array[];
<…>
def run():
<…>
#вызов
Пример прикладного класса
Язык Python
class objectExampe(OST_Object_Abstract):
double left_array[];
<…>
def run():
<…>
#вызов
![Пример прикладного класса Язык Python class objectExampe(OST_Object_Abstract): double left_array[]; def run(): #вызов](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/470452/slide-11.jpg)
Слайд 13Топология связей между объектами.
Определение связей между объектами через локальное описание окрестности
Топология связей между объектами.
Определение связей между объектами через локальное описание окрестности
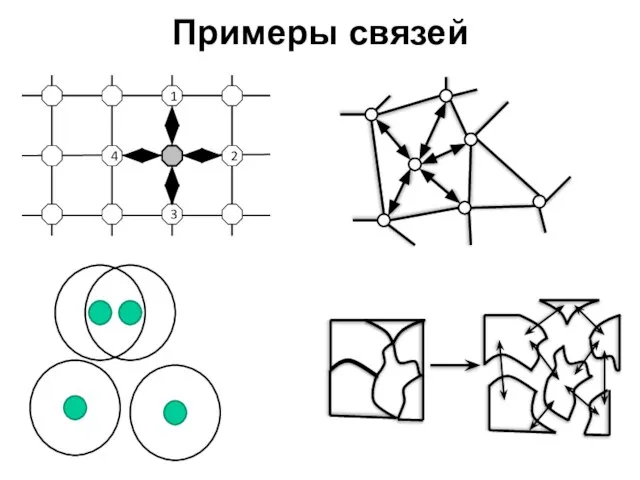
Слайд 14Примеры связей
Примеры связей
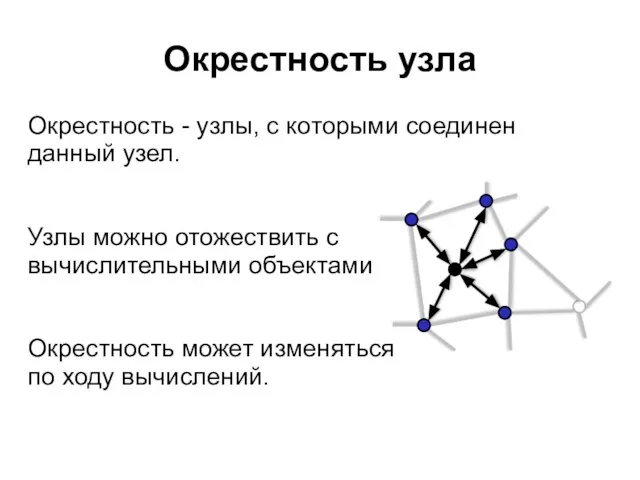
Слайд 15Окрестность узла
Окрестность - узлы, с которыми соединен
данный узел.
Узлы можно отожествить с
вычислительными объектами
Окрестность
Окрестность узла
Окрестность - узлы, с которыми соединен
данный узел.
Узлы можно отожествить с
вычислительными объектами
Окрестность
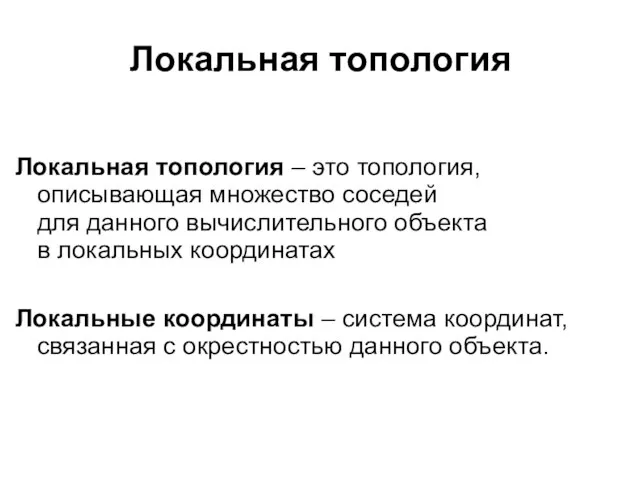
Слайд 16Локальная топология
Локальная топология – это топология, описывающая множество соседей
для данного вычислительного объекта
в
Локальная топология
Локальная топология – это топология, описывающая множество соседей
для данного вычислительного объекта
в
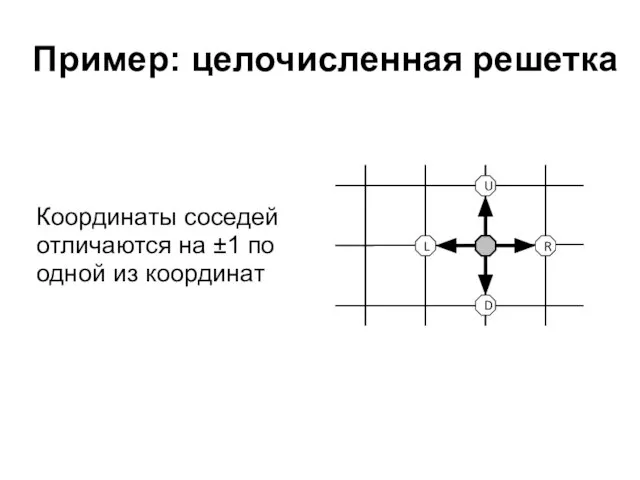
Слайд 17Пример: целочисленная решетка
Координаты соседей отличаются на ±1 по одной из координат
Пример: целочисленная решетка
Координаты соседей отличаются на ±1 по одной из координат
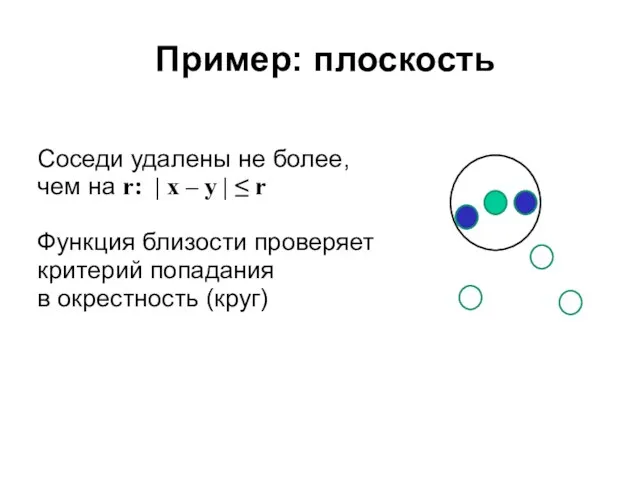
Слайд 18Пример: плоскость
Соседи удалены не более, чем на r: | x – y
Пример: плоскость
Соседи удалены не более, чем на r: | x – y
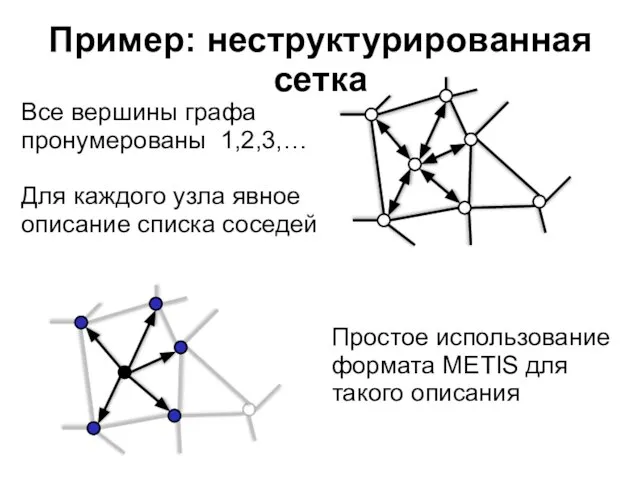
Слайд 19Пример: неструктурированная сетка
Все вершины графа пронумерованы 1,2,3,…
Для каждого узла явное описание списка
Пример: неструктурированная сетка
Все вершины графа пронумерованы 1,2,3,…
Для каждого узла явное описание списка
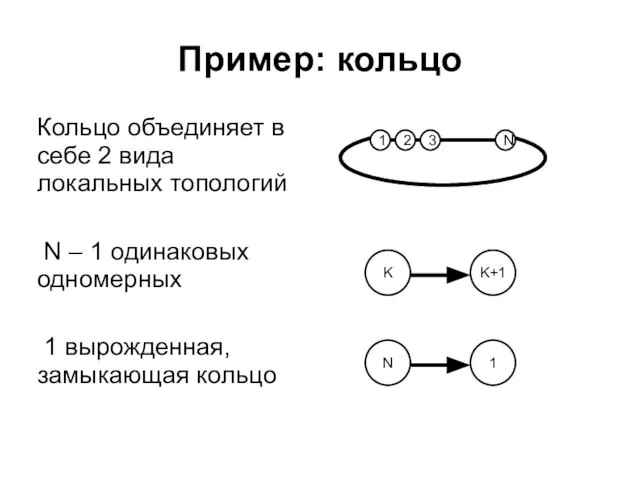
Слайд 20Пример: кольцо
Кольцо объединяет в себе 2 вида локальных топологий
N – 1
Пример: кольцо
Кольцо объединяет в себе 2 вида локальных топологий
N – 1
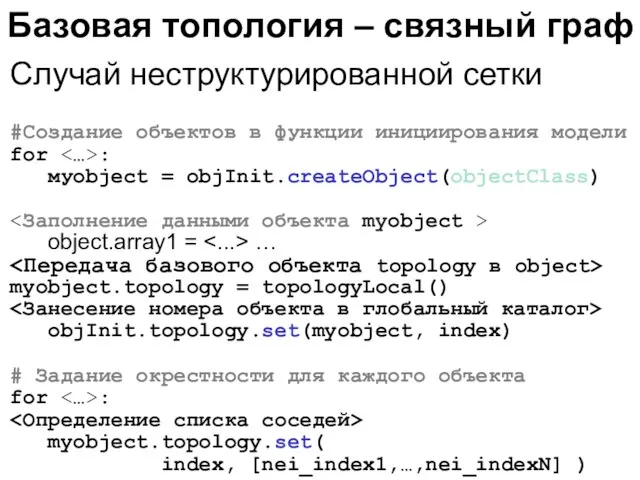
Слайд 21Базовая топология – связный граф
Случай неструктурированной сетки
#Создание объектов в функции инициирования модели
for
Базовая топология – связный граф
Случай неструктурированной сетки
#Создание объектов в функции инициирования модели
for
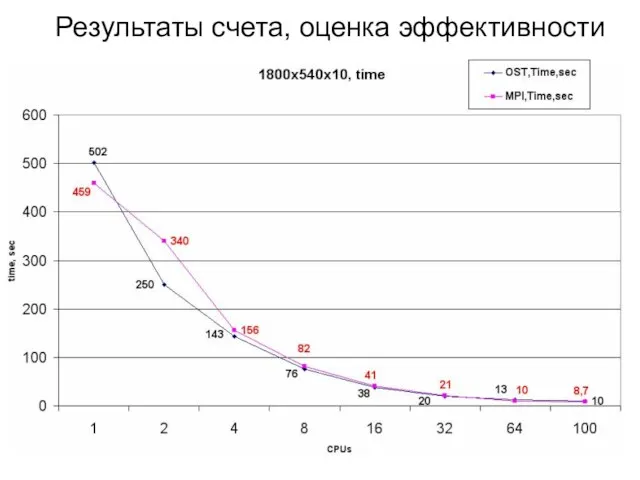
Слайд 22Результаты счета, оценка эффективности
Результаты счета, оценка эффективности
Слайд 23Что конструктивно новое
Формализация «окружения» объекта в виде списка формальных соседей.
Автоматическое построение
Что конструктивно новое
Формализация «окружения» объекта в виде списка формальных соседей.
Автоматическое построение
Слайд 24Технические характеристики
1. Коэффициент эффективности параллельного счета Кр > 0.9
2. Практически автоматическая сборка
Технические характеристики
1. Коэффициент эффективности параллельного счета Кр > 0.9
2. Практически автоматическая сборка
Слайд 255. Хранения множества объектов программной модели в файле объектов (базе данных). Контрольные
5. Хранения множества объектов программной модели в файле объектов (базе данных). Контрольные
 Осевая и центральная симметрия (8 класс)
Осевая и центральная симметрия (8 класс) Такая нелюбимая. Весёлая Грамматика
Такая нелюбимая. Весёлая Грамматика Права предоставления микрозаймов
Права предоставления микрозаймов Проект создания информационно-аналитического Интернет-портала регионального масс-медийного комплекса
Проект создания информационно-аналитического Интернет-портала регионального масс-медийного комплекса Отопление. Тест
Отопление. Тест Состав чисел от 1 до 10
Состав чисел от 1 до 10 Геометрическая прогрессия
Геометрическая прогрессия Виды сил
Виды сил Конкурс Богатство страны Светофории
Конкурс Богатство страны Светофории Отраслевые решения PROMT
Отраслевые решения PROMT ЗАПОРНО-РЕГУЛИРОВОЧНАЯ АРМАТУРА ЗАДВИЖКИ
ЗАПОРНО-РЕГУЛИРОВОЧНАЯ АРМАТУРА ЗАДВИЖКИ Классный час, посвященный выдающемуся полководцу Великой Отечественной войны, генералу армии, Ватутину Николаю Федоровичу.
Классный час, посвященный выдающемуся полководцу Великой Отечественной войны, генералу армии, Ватутину Николаю Федоровичу. Ценные бумаги. Надежность и доходность ценных бумаг
Ценные бумаги. Надежность и доходность ценных бумаг Энергосбережение в быту (8 класс)
Энергосбережение в быту (8 класс) Spot online. Попробовать новое - легко!
Spot online. Попробовать новое - легко! Тесты по физической культуре для 7 класса
Тесты по физической культуре для 7 класса Типаж Джиджи
Типаж Джиджи «Четвертый канал» «Четвертый канал» - это первая независимая негосударственная телекомпания Екатеринбурга. Наша работа отмечена
«Четвертый канал» «Четвертый канал» - это первая независимая негосударственная телекомпания Екатеринбурга. Наша работа отмечена  молодші іст шах
молодші іст шах Эффективность внедрения ФГОС в учреждениях НПО и СПО Удмуртской Республики
Эффективность внедрения ФГОС в учреждениях НПО и СПО Удмуртской Республики ФИЗИОЛОГИЧЕСКАЯ ФУНКЦИЯ ГУМУСОВЫХ КИСЛОТ ПЕЛОИДОВ Самарский государственный медицинский университет
ФИЗИОЛОГИЧЕСКАЯ ФУНКЦИЯ ГУМУСОВЫХ КИСЛОТ ПЕЛОИДОВ Самарский государственный медицинский университет Матрица. Поиски смыслов
Матрица. Поиски смыслов Человек и общество
Человек и общество Защита прав потребителя
Защита прав потребителя Беляковой от подружек
Беляковой от подружек Федеральное государственное бюджетное учреждение «Специализированный центр учета в агропромышленном комплексе» (ФГБУ «Спеццен
Федеральное государственное бюджетное учреждение «Специализированный центр учета в агропромышленном комплексе» (ФГБУ «Спеццен ВОПРОСЫ К ФИЛЬМУ « КАК ИСКУССТВО СОТВОРИЛО МИР» (BBC)
ВОПРОСЫ К ФИЛЬМУ « КАК ИСКУССТВО СОТВОРИЛО МИР» (BBC) Тренажеры по русскому языку
Тренажеры по русскому языку