- Удаление невидимых линий и поверхностей

Содержание
- 2. Методы удаления невидимых линий и поверхностей При проецировании трехмерных объектов на картинную плоскость (экран) часто оказывается,
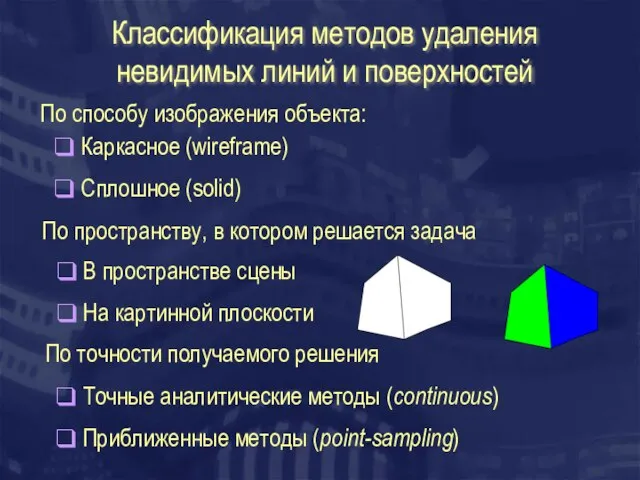
- 3. Классификация методов удаления невидимых линий и поверхностей Каркасное (wireframe) Сплошное (solid) В пространстве сцены На картинной
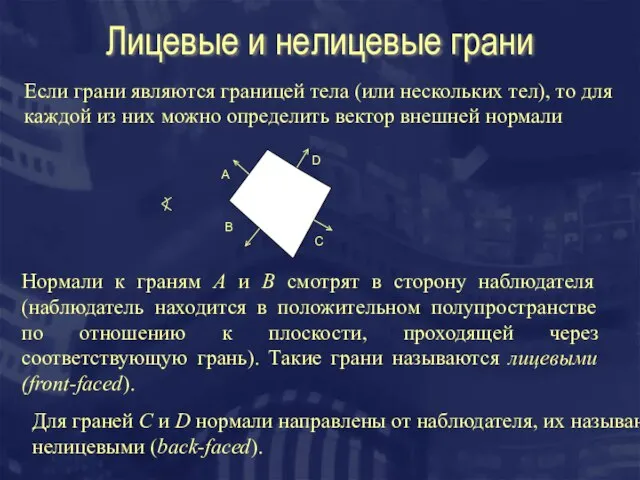
- 4. Лицевые и нелицевые грани Если грани являются границей тела (или нескольких тел), то для каждой из
- 5. Свойства (не)лицевых граней В случае, когда грани являются границей тела (или нескольких тел), то ни одна
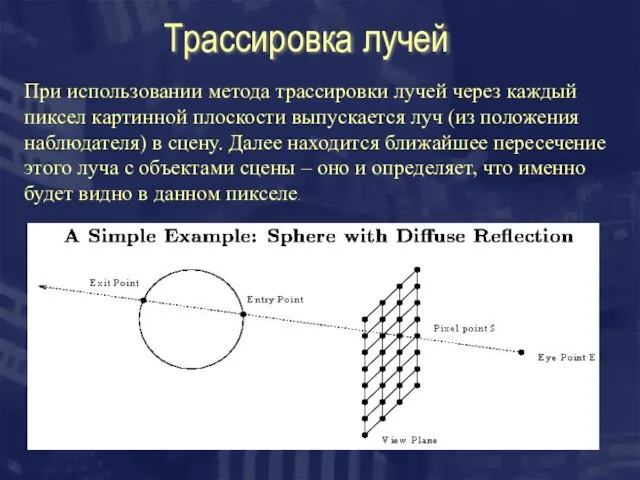
- 6. Трассировка лучей При использовании метода трассировки лучей через каждый пиксел картинной плоскости выпускается луч (из положения
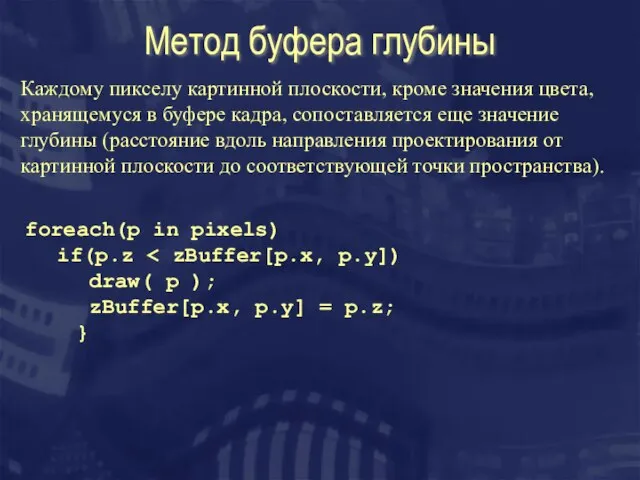
- 7. Метод буфера глубины Каждому пикселу картинной плоскости, кроме значения цвета, хранящемуся в буфере кадра, сопоставляется еще
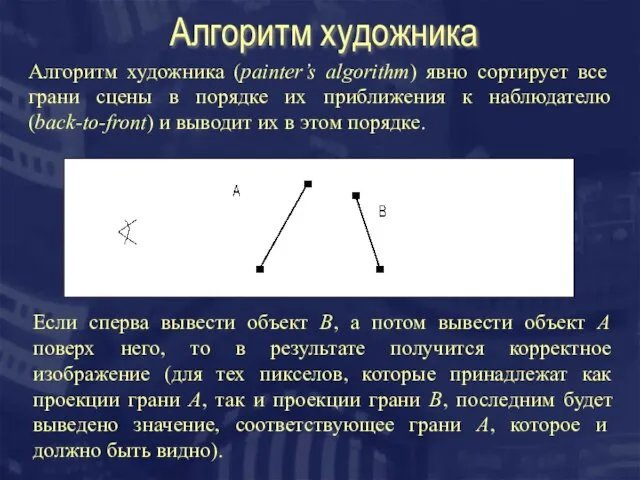
- 8. Алгоритм художника Алгоритм художника (painter’s algorithm) явно сортирует все грани сцены в порядке их приближения к
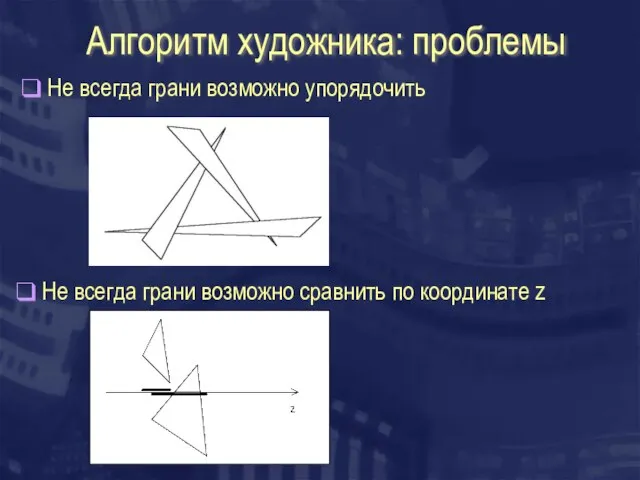
- 9. Алгоритм художника: проблемы Не всегда грани возможно упорядочить Не всегда грани возможно сравнить по координате z
- 10. ё Упорядочивание граней Проведем через одну из граней плоскость и проверим, лежит ли другая грань целиком
- 11. Пять проверок в алгоритме художника 1. Накладываются ли x-габариты мн-ков? 2. Накладываются ли y-габариты мн-ков? 3.
- 12. Метод двоичного разбиения пространства (1/3) Пусть известно, что плоскость π разбивает все грани (объекты) сцены на
- 13. Метод двоичного разбиения пространства (2/3) A B C D C E1 E2 + - + -
- 14. Метод двоичного разбиения пространства (3/3) class BSPNode { Face *face; // Грань объекта BSPNode *positive; BSPNode
- 15. Лицевые и нелицевые грани в OpenGL void glFrontFace(GLenum type); type = {GL_CW|GL_CCW} void glCullFace(GLenum type); type
- 16. Z-буфер Необходимо создать z-буфер glutDisplayMode(GLUT_DEPTH|/*…*/); Перед рисованием сцены очистить z-буфер glClear(GL_DEPTH_BUFFER_BIT|/*…*/); Включить или выключить сравнение z
- 17. Уменьшение количества вершин 1 0 2 3 4 5 GL_TRIANGLE_FAN: 3n vs. 1+n, n>1 1 0
- 19. Скачать презентацию
Слайд 2Методы удаления невидимых линий и поверхностей
При проецировании трехмерных объектов на картинную плоскость
Методы удаления невидимых линий и поверхностей
При проецировании трехмерных объектов на картинную плоскость
Слайд 3Классификация методов удаления невидимых линий и поверхностей
Каркасное (wireframe)
Сплошное (solid)
Классификация методов удаления невидимых линий и поверхностей
Каркасное (wireframe)
Сплошное (solid)
Слайд 4Лицевые и нелицевые грани
Если грани являются границей тела (или нескольких тел), то
Лицевые и нелицевые грани
Если грани являются границей тела (или нескольких тел), то
Слайд 5Свойства (не)лицевых граней
В случае, когда грани являются границей тела (или нескольких тел),
Свойства (не)лицевых граней
В случае, когда грани являются границей тела (или нескольких тел),
Слайд 6Трассировка лучей
При использовании метода трассировки лучей через каждый пиксел картинной плоскости выпускается
Трассировка лучей
При использовании метода трассировки лучей через каждый пиксел картинной плоскости выпускается
Слайд 7Метод буфера глубины
Каждому пикселу картинной плоскости, кроме значения цвета, хранящемуся в буфере
Метод буфера глубины
Каждому пикселу картинной плоскости, кроме значения цвета, хранящемуся в буфере
Слайд 8Алгоритм художника
Алгоритм художника (painter’s algorithm) явно сортирует все грани сцены в порядке
Алгоритм художника
Алгоритм художника (painter’s algorithm) явно сортирует все грани сцены в порядке
Слайд 9Алгоритм художника: проблемы
Не всегда грани возможно упорядочить
Не всегда грани возможно
Алгоритм художника: проблемы
Не всегда грани возможно упорядочить
Не всегда грани возможно
Слайд 10ё
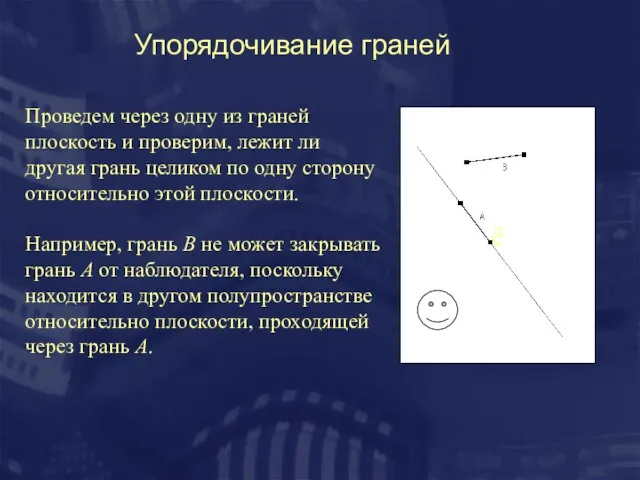
Упорядочивание граней
Проведем через одну из граней плоскость и проверим, лежит ли другая
ё
Упорядочивание граней
Проведем через одну из граней плоскость и проверим, лежит ли другая
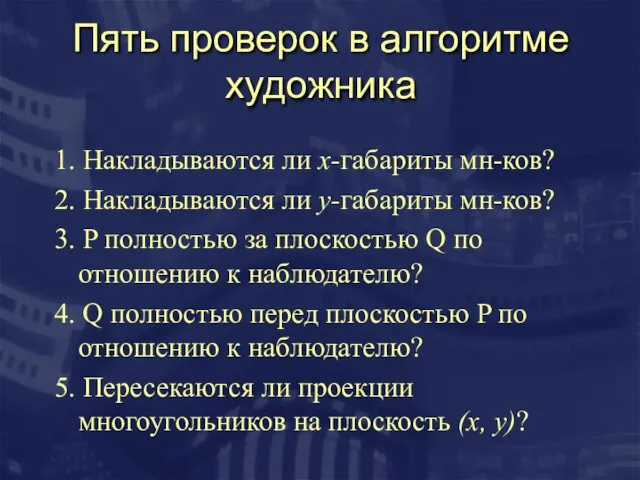
Слайд 11Пять проверок в алгоритме художника
1. Накладываются ли x-габариты мн-ков?
2. Накладываются ли y-габариты
Пять проверок в алгоритме художника
1. Накладываются ли x-габариты мн-ков?
2. Накладываются ли y-габариты
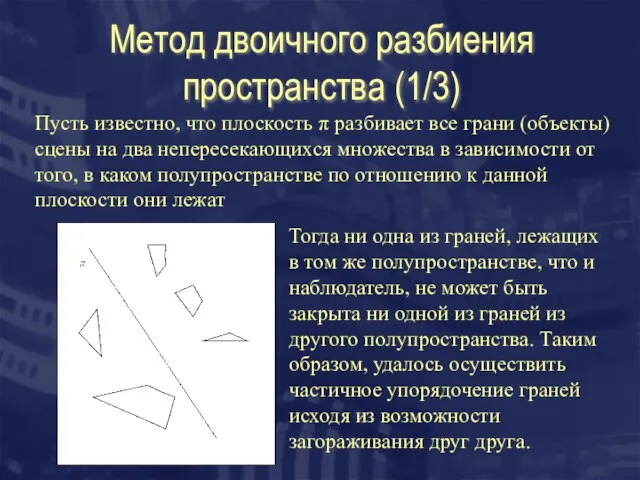
Слайд 12Метод двоичного разбиения пространства (1/3)
Пусть известно, что плоскость π разбивает все грани
Метод двоичного разбиения пространства (1/3)
Пусть известно, что плоскость π разбивает все грани
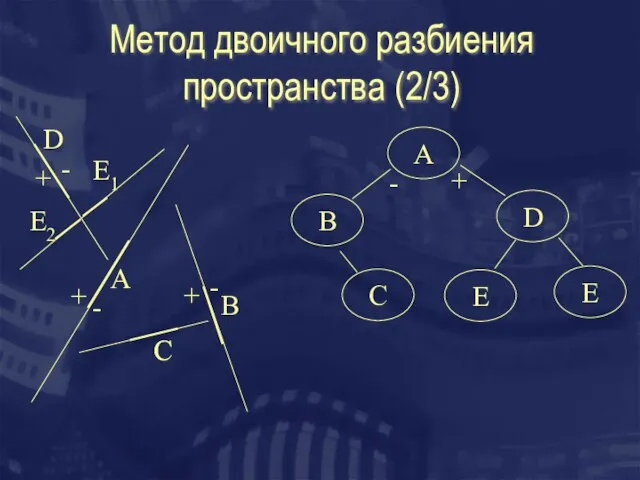
Слайд 13Метод двоичного разбиения пространства (2/3)
A
B
C
D
C
E1
E2
+
-
+
-
+
-
A
B
C
D
E
E
+
-
Метод двоичного разбиения пространства (2/3)
A
B
C
D
C
E1
E2
+
-
+
-
+
-
A
B
C
D
E
E
+
-
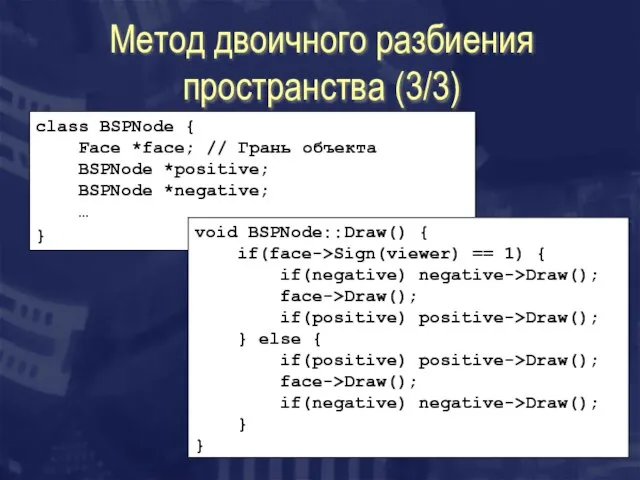
Слайд 14Метод двоичного разбиения пространства (3/3)
class BSPNode {
Face *face; // Грань объекта
Метод двоичного разбиения пространства (3/3)
class BSPNode {
Face *face; // Грань объекта
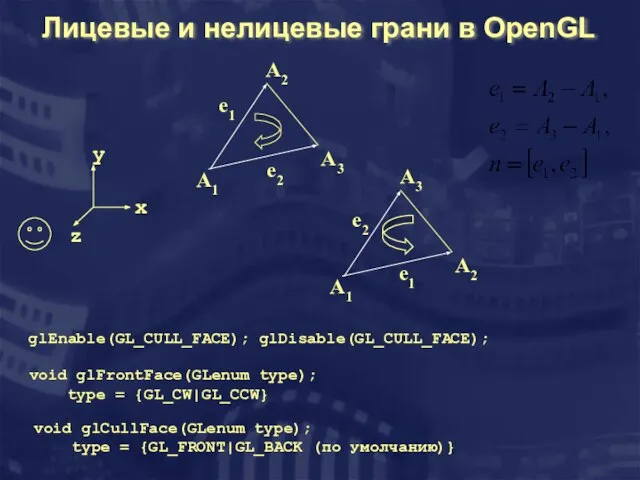
Слайд 15Лицевые и нелицевые грани в OpenGL
void glFrontFace(GLenum type);
type = {GL_CW|GL_CCW}
void glCullFace(GLenum
Лицевые и нелицевые грани в OpenGL
void glFrontFace(GLenum type);
type = {GL_CW|GL_CCW}
void glCullFace(GLenum
Слайд 16Z-буфер
Необходимо создать z-буфер
glutDisplayMode(GLUT_DEPTH|/*…*/);
Перед рисованием сцены очистить z-буфер
glClear(GL_DEPTH_BUFFER_BIT|/*…*/);
Включить или выключить
Z-буфер
Необходимо создать z-буфер
glutDisplayMode(GLUT_DEPTH|/*…*/);
Перед рисованием сцены очистить z-буфер
glClear(GL_DEPTH_BUFFER_BIT|/*…*/);
Включить или выключить

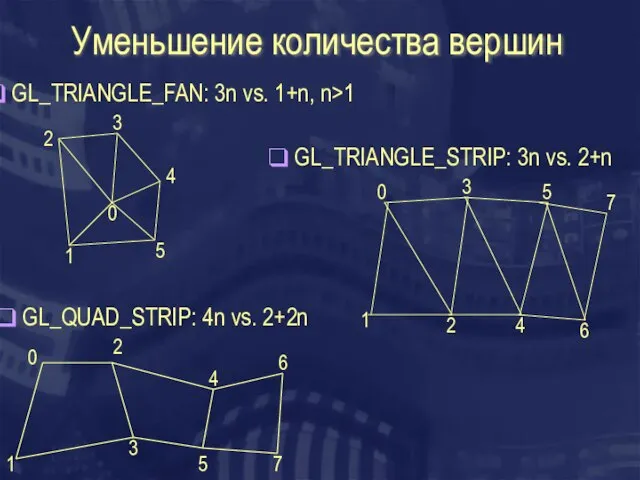
Слайд 17Уменьшение количества вершин
1
0
2
3
4
5
GL_TRIANGLE_FAN: 3n vs. 1+n, n>1
1
0
2
3
4
5
6
7
GL_TRIANGLE_STRIP: 3n vs. 2+n
Уменьшение количества вершин
1
0
2
3
4
5
GL_TRIANGLE_FAN: 3n vs. 1+n, n>1
1
0
2
3
4
5
6
7
GL_TRIANGLE_STRIP: 3n vs. 2+n
 Мотивация и стимулирование персонала
Мотивация и стимулирование персонала  Живопись, литература, архитектура в X- начале XIII в.
Живопись, литература, архитектура в X- начале XIII в. Роль игры в развитии познавательных психических процессов будущих школьников
Роль игры в развитии познавательных психических процессов будущих школьников Способы преобразования положения фигуры относительно плоскостей проекций
Способы преобразования положения фигуры относительно плоскостей проекций КОНКРЕТНОЕ СОЦИОЛОГИЧЕСКОЕ ИССЛЕДОВАНИЕ.
КОНКРЕТНОЕ СОЦИОЛОГИЧЕСКОЕ ИССЛЕДОВАНИЕ. Кто хочет стать миллионером
Кто хочет стать миллионером Рост численности населения
Рост численности населения Национальные интересы России (часть 1)
Национальные интересы России (часть 1) Жилые кластеры
Жилые кластеры БОЙ ЗА АРКТИКУ
БОЙ ЗА АРКТИКУ А.С.Пушкин «Дубровский»
А.С.Пушкин «Дубровский» Шаблон РСД22
Шаблон РСД22 Презентация на тему: Плавление и отвердевание
Презентация на тему: Плавление и отвердевание Пераработка крови
Пераработка крови С. Михалков – детям Басня «Ошибка»
С. Михалков – детям Басня «Ошибка» Словарь в картинках
Словарь в картинках Организация АРМ инженера Help Desk ИТ - специалиста технической поддержки ОАО "Компании "Сухой" "НАЗ им. В.П. Чкалова"
Организация АРМ инженера Help Desk ИТ - специалиста технической поддержки ОАО "Компании "Сухой" "НАЗ им. В.П. Чкалова" Народное творчество Южной Кореи
Народное творчество Южной Кореи Николай Алексеевич Заболоцкий БИОГРАФИЯ
Николай Алексеевич Заболоцкий БИОГРАФИЯ Всемирное антидопинговое агентство (World Anti-Doping Agency, WADA)
Всемирное антидопинговое агентство (World Anti-Doping Agency, WADA) Имя прилагательное.
Имя прилагательное. Оформление тортов. Украшение тортов в домашних условиях
Оформление тортов. Украшение тортов в домашних условиях Социально-политический кризис в России в начале 20 века
Социально-политический кризис в России в начале 20 века Конкурс презентаций «Интерактивная мозаика»
Конкурс презентаций «Интерактивная мозаика» ИМИДЖ УЧИТЕЛЯ как важнейшая составляющая образовательного процесса Заместитель директора по учебной работе ГУО «СОШ №4 г. Свет
ИМИДЖ УЧИТЕЛЯ как важнейшая составляющая образовательного процесса Заместитель директора по учебной работе ГУО «СОШ №4 г. Свет Типы гиперссылок на примере материала информационного агентства Омскпресс
Типы гиперссылок на примере материала информационного агентства Омскпресс Развитие критического мышления для формирования мыслительной деятельности
Развитие критического мышления для формирования мыслительной деятельности Free Business Cards
Free Business Cards