- Жёсткий диск

Содержание
- 2. Накопи́тель на жёстких магни́тных ди́сках, жёсткий диск или винче́стер, (англ. Hard Disk Drive, англ. HDD )
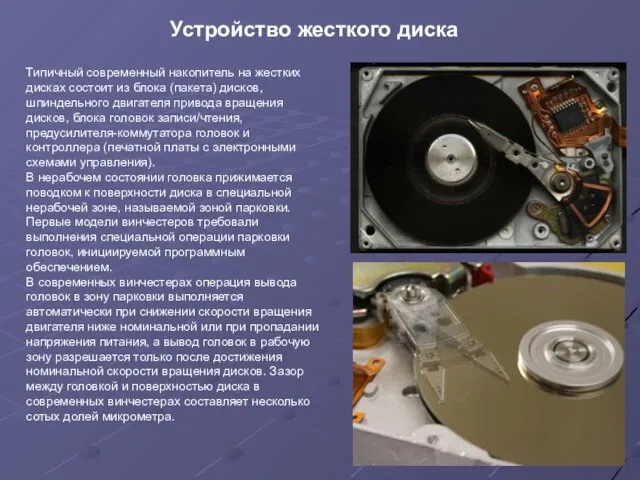
- 3. Типичный современный накопитель на жестких дисках состоит из блока (пакета) дисков, шпиндельного двигателя привода вращения дисков,
- 4. В большой степени максимальная плотность записи зависит от конструкции и характеристик головок записи/чтения. Раньше в винчестерах
- 5. В основе этой системы лежит предварительная (произведенная при изготовлении винчестера) запись специальных цифровых последовательностей, которые называются
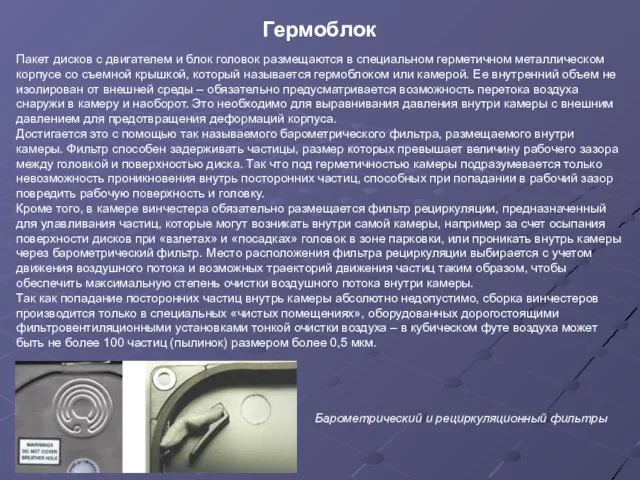
- 6. Пакет дисков с двигателем и блок головок размещаются в специальном герметичном металлическом корпусе со съемной крышкой,
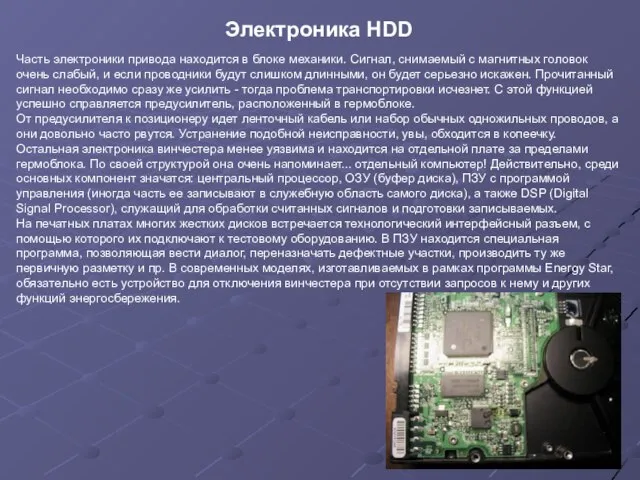
- 7. Часть электроники привода находится в блоке механики. Сигнал, снимаемый с магнитных головок очень слабый, и если
- 8. Жесткий диск, как и всякое другое блочное устройство, хранит информацию фиксированными порциями, которые называются блоками. Блок
- 9. Проблемы, возникшие с ограниченностью BIOS по части физической геометрии дисков, привели в конце концов к появлению
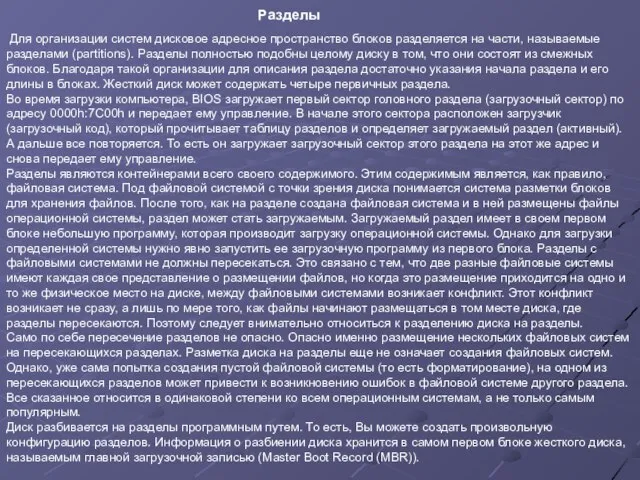
- 10. Для организации систем дисковое адресное пространство блоков разделяется на части, называемые разделами (partitions). Разделы полностью подобны
- 11. Структура MBR и разделов 4 3 2 1 460 бит Boot block HDPT 4 3 2
- 12. MBR является основным средством загрузки с жесткого диска, поддерживаемым BIOS. Для наглядности представим содержимое загрузочной области
- 13. Давайте посмотрим как устроен дескриптор раздела:. * 0001h-0003h начало раздела ** 0005h-0007h конец раздела С точки
- 14. параметр довольно свободный от каких-либо стандартов, ограничиваемый лишь форм-факторами корпусов системных блоков. Наиболее распространены накопители с
- 15. общее число секторов на одной дорожке. Часто, для современных накопителей показатель условный, т.к. они имеют неравное
- 16. усредненный результат большого числа операций позиционирования на разные цилиндры, часто называют средним временем позиционирования. Среднее время
- 17. определяет скорость, с которой данные считываются или записываются на диск после того, как головки займут необходимое
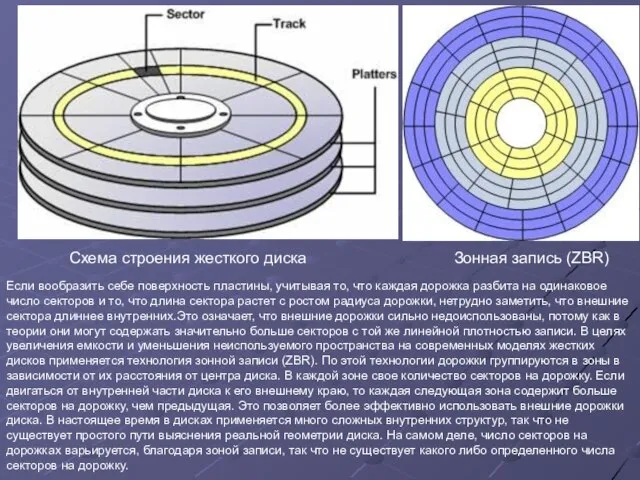
- 18. Носители жестких дисков, в отличие от гибких, имеют постоянное число дорожек и секторов, изменить которое невозможно.
- 19. Схема строения жесткого диска Зонная запись (ZBR) Если вообразить себе поверхность пластины, учитывая то, что каждая
- 20. Не менее 16% суммарной рабочей поверхности дисков отводится под служебную информацию, которая обеспечивает нормальную работу винчестера.
- 21. Интерфейсом накопителей называется набор электроники, обеспечивающий обмен информацией между контроллером устройства (кеш-буфером) и компьютером. В настоящее
- 22. Устройства ATA IDE, E-IDE, ATA-2, Fast ATA-2, ATA-3 и ATA/ATAPI-4 электрически совместимы, степень логической совместимости достаточно
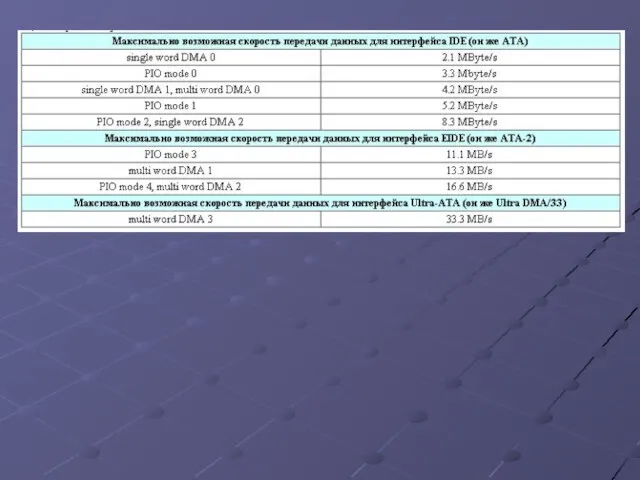
- 23. В-четвертых - повысилась производительность. Накопители с интерфейсом IDE характеризовались максимальной скоростью передачи данных на уровне 3
- 24. В спецификации ATA фигурируют следующие компоненты: Хост-адаптер - средства сопряжения интерфейса ATA с системной шиной (в
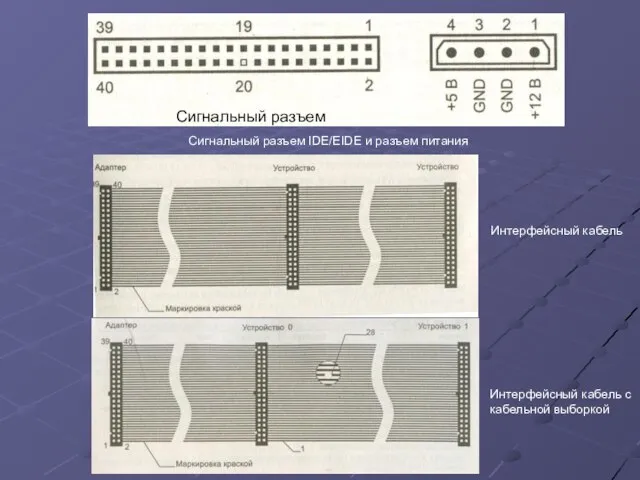
- 25. Все информационные сигналы интерфейса передаются через 40-контактный разъем, у которого ключем является отсутствующий на вилке и
- 26. Сигнальный разъем IDE/EIDE и разъем питания Интерфейсный кабель Интерфейсный кабель с кабельной выборкой
- 28. Система команд АТА Стандарт ATA задает систему команд, ориентированную, опять-таки, на накопители на магнитных дисках. Для
- 29. Средства управления энергопотреблением - Power Management не являются обязательными. С точки зрения потребления различают следующие состояния,
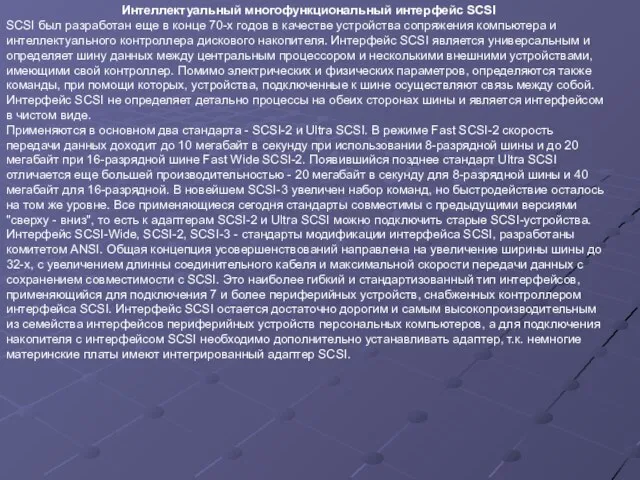
- 30. Интеллектуальный многофункциональный интерфейс SCSI SCSI был разработан еще в конце 70-х годов в качестве устройства сопряжения
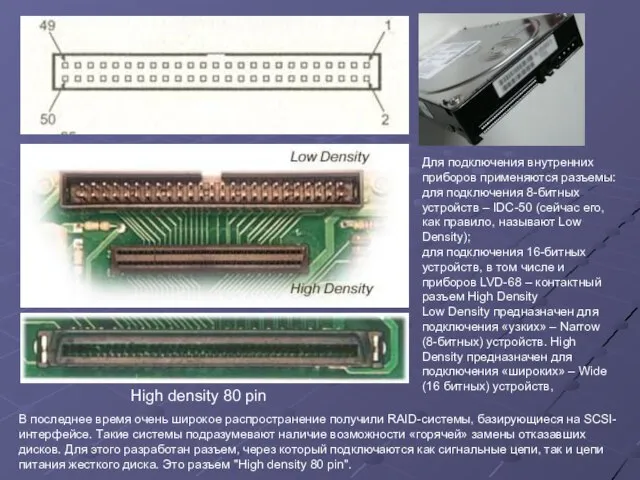
- 31. High density 80 pin Для подключения внутренних приборов применяются разъемы: для подключения 8-битных устройств – IDC-50
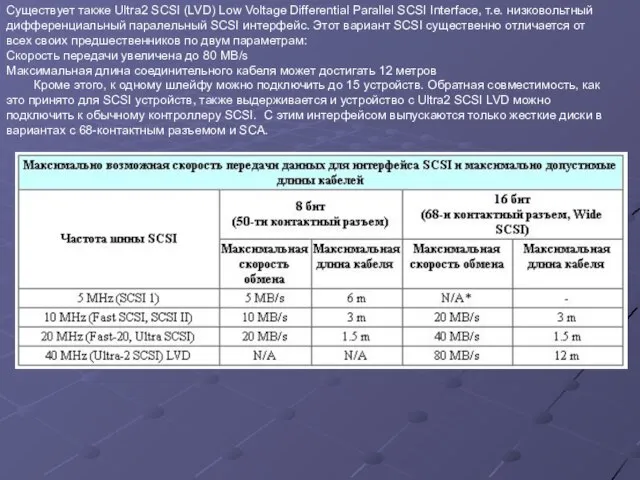
- 32. Существует также Ultra2 SCSI (LVD) Low Voltage Differential Parallel SCSI Interface, т.е. низковольтный дифференциальный паралельный SCSI
- 33. Интерфейс SATA SATA (англ. Serial ATA) — последовательный интерфейс обмена данными с накопителями информации (как правило,
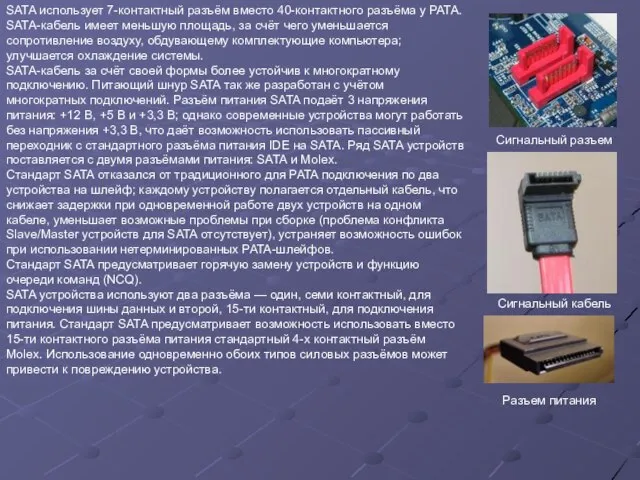
- 34. SATA использует 7-контактный разъём вместо 40-контактного разъёма у PATA. SATA-кабель имеет меньшую площадь, за счёт чего
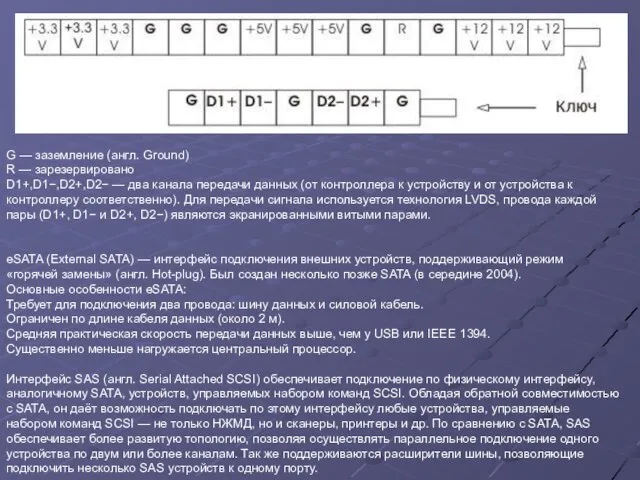
- 35. G — заземление (англ. Ground) R — зарезервировано D1+,D1−,D2+,D2− — два канала передачи данных (от контроллера
- 36. Интерфейс SATA II Введен с 2004 г. Увеличилась пропускная способность (со 150 до 300 МBps). Учитывая,
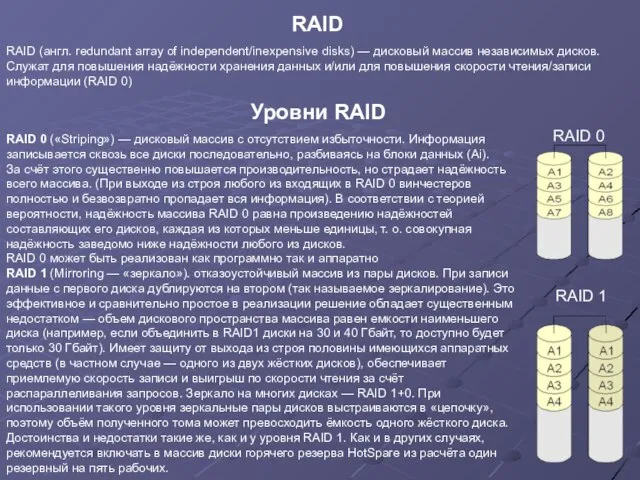
- 37. RAID (англ. redundant array of independent/inexpensive disks) — дисковый массив независимых дисков. Служат для повышения надёжности
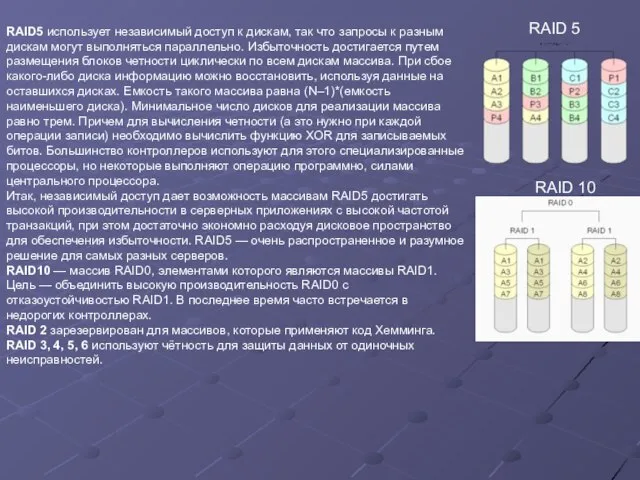
- 38. RAID5 использует независимый доступ к дискам, так что запросы к разным дискам могут выполняться параллельно. Избыточность
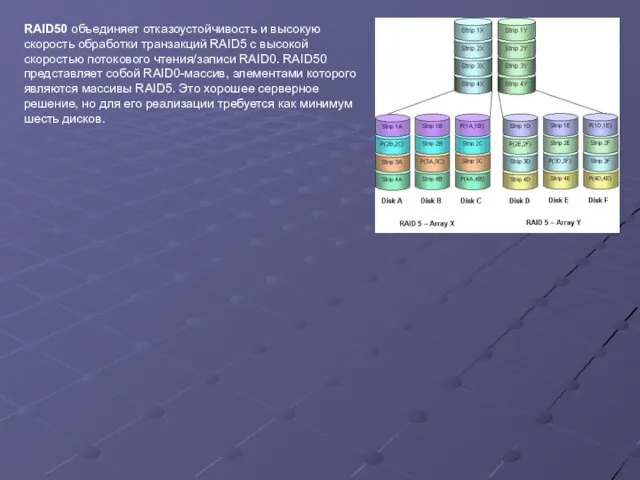
- 39. RAID50 объединяет отказоустойчивость и высокую скорость обработки транзакций RAID5 с высокой скоростью потокового чтения/записи RAID0. RAID50
- 42. Скачать презентацию

Слайд 3Типичный современный накопитель на жестких дисках состоит из блока (пакета) дисков, шпиндельного
Типичный современный накопитель на жестких дисках состоит из блока (пакета) дисков, шпиндельного
Слайд 4В большой степени максимальная плотность записи зависит от конструкции и характеристик головок
В большой степени максимальная плотность записи зависит от конструкции и характеристик головок

Слайд 5В основе этой системы лежит предварительная (произведенная при изготовлении винчестера) запись специальных
В основе этой системы лежит предварительная (произведенная при изготовлении винчестера) запись специальных
Слайд 6Пакет дисков с двигателем и блок головок размещаются в специальном герметичном металлическом
Пакет дисков с двигателем и блок головок размещаются в специальном герметичном металлическом
Слайд 7Часть электроники привода находится в блоке механики. Сигнал, снимаемый с магнитных головок
Часть электроники привода находится в блоке механики. Сигнал, снимаемый с магнитных головок
Слайд 8Жесткий диск, как и всякое другое блочное устройство, хранит информацию фиксированными порциями,
Жесткий диск, как и всякое другое блочное устройство, хранит информацию фиксированными порциями,

Слайд 9Проблемы, возникшие с ограниченностью BIOS по части физической геометрии дисков, привели в
Проблемы, возникшие с ограниченностью BIOS по части физической геометрии дисков, привели в

Слайд 10 Для организации систем дисковое адресное пространство блоков разделяется на части, называемые
Для организации систем дисковое адресное пространство блоков разделяется на части, называемые
Слайд 11Структура MBR и разделов
4
3
2
1
460 бит
Boot block
HDPT
4
3
2
1
4
3
2
1
Extended
Primary
Extended
HDPT
HDPT
Secondary
. . .
Структура MBR и разделов
4
3
2
1
460 бит
Boot block
HDPT
4
3
2
1
4
3
2
1
Extended
Primary
Extended
HDPT
HDPT
Secondary
. . .
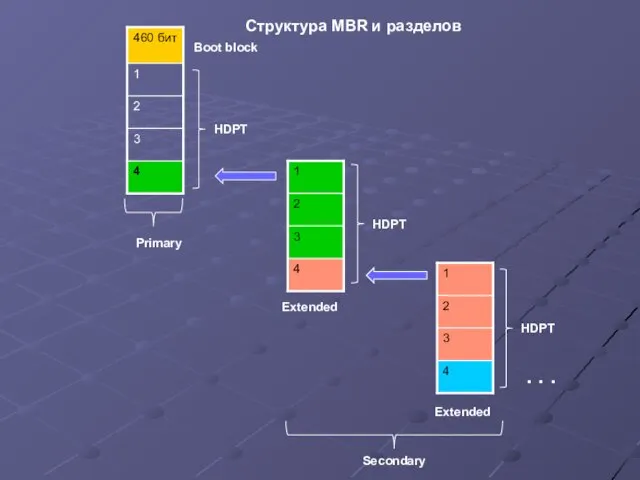
Слайд 12 MBR является основным средством загрузки с жесткого диска, поддерживаемым BIOS. Для
MBR является основным средством загрузки с жесткого диска, поддерживаемым BIOS. Для
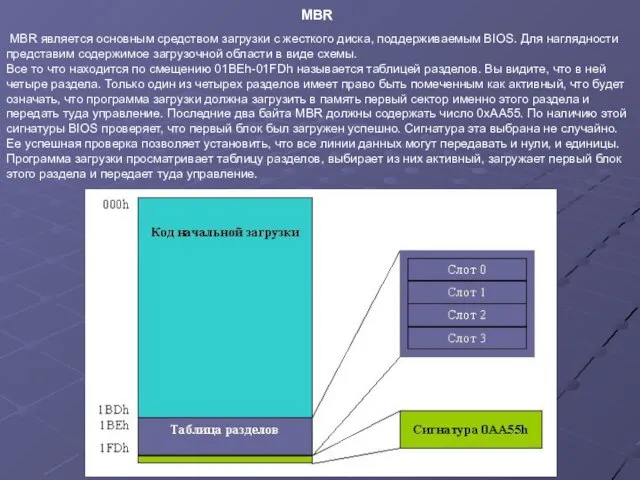
Слайд 13 Давайте посмотрим как устроен дескриптор раздела:.
* 0001h-0003h начало раздела
** 0005h-0007h
Давайте посмотрим как устроен дескриптор раздела:.
* 0001h-0003h начало раздела
** 0005h-0007h
Слайд 14параметр довольно свободный от каких-либо стандартов, ограничиваемый лишь форм-факторами корпусов системных блоков.
параметр довольно свободный от каких-либо стандартов, ограничиваемый лишь форм-факторами корпусов системных блоков.
Слайд 15 общее число секторов на одной дорожке. Часто, для современных накопителей показатель
общее число секторов на одной дорожке. Часто, для современных накопителей показатель
Слайд 16 усредненный результат большого числа операций позиционирования на разные цилиндры, часто называют
усредненный результат большого числа операций позиционирования на разные цилиндры, часто называют
Слайд 17 определяет скорость, с которой данные считываются или записываются на диск после
определяет скорость, с которой данные считываются или записываются на диск после
Слайд 18Носители жестких дисков, в отличие от гибких, имеют постоянное число дорожек и
Носители жестких дисков, в отличие от гибких, имеют постоянное число дорожек и
Слайд 19Схема строения жесткого диска
Зонная запись (ZBR)
Если вообразить себе поверхность пластины, учитывая
Схема строения жесткого диска
Зонная запись (ZBR)
Если вообразить себе поверхность пластины, учитывая
Слайд 20Не менее 16% суммарной рабочей поверхности дисков отводится под служебную информацию, которая
Не менее 16% суммарной рабочей поверхности дисков отводится под служебную информацию, которая
Слайд 21Интерфейсом накопителей называется набор электроники, обеспечивающий обмен информацией между контроллером устройства (кеш-буфером)
Интерфейсом накопителей называется набор электроники, обеспечивающий обмен информацией между контроллером устройства (кеш-буфером)
Слайд 22Устройства ATA IDE, E-IDE, ATA-2, Fast ATA-2, ATA-3 и ATA/ATAPI-4 электрически совместимы,
Устройства ATA IDE, E-IDE, ATA-2, Fast ATA-2, ATA-3 и ATA/ATAPI-4 электрически совместимы,
Слайд 23В-четвертых - повысилась производительность. Накопители с интерфейсом IDE характеризовались максимальной скоростью передачи
В-четвертых - повысилась производительность. Накопители с интерфейсом IDE характеризовались максимальной скоростью передачи
Слайд 24 В спецификации ATA фигурируют следующие компоненты:
Хост-адаптер - средства сопряжения интерфейса ATA
В спецификации ATA фигурируют следующие компоненты:
Хост-адаптер - средства сопряжения интерфейса ATA
Слайд 25 Все информационные сигналы интерфейса передаются через 40-контактный разъем, у которого ключем является
Все информационные сигналы интерфейса передаются через 40-контактный разъем, у которого ключем является
Слайд 26Сигнальный разъем IDE/EIDE и разъем питания
Интерфейсный кабель
Интерфейсный кабель с кабельной выборкой
Сигнальный разъем IDE/EIDE и разъем питания
Интерфейсный кабель
Интерфейсный кабель с кабельной выборкой
Слайд 28Система команд АТА
Стандарт ATA задает систему команд, ориентированную, опять-таки, на накопители на
Система команд АТА
Стандарт ATA задает систему команд, ориентированную, опять-таки, на накопители на
Слайд 29 Средства управления энергопотреблением - Power Management не являются обязательными. С точки зрения
Средства управления энергопотреблением - Power Management не являются обязательными. С точки зрения
Слайд 30Интеллектуальный многофункциональный интерфейс SCSI
SCSI был разработан еще в конце 70-х годов
Интеллектуальный многофункциональный интерфейс SCSI
SCSI был разработан еще в конце 70-х годов
Слайд 31High density 80 pin
Для подключения внутренних приборов применяются разъемы:
для подключения 8-битных устройств
High density 80 pin
Для подключения внутренних приборов применяются разъемы:
для подключения 8-битных устройств
Слайд 32Существует также Ultra2 SCSI (LVD) Low Voltage Differential Parallel SCSI Interface, т.е.
Существует также Ultra2 SCSI (LVD) Low Voltage Differential Parallel SCSI Interface, т.е.
Слайд 33Интерфейс SATA
SATA (англ. Serial ATA) — последовательный интерфейс обмена данными с накопителями
Интерфейс SATA
SATA (англ. Serial ATA) — последовательный интерфейс обмена данными с накопителями

Слайд 34SATA использует 7-контактный разъём вместо 40-контактного разъёма у PATA. SATA-кабель имеет меньшую
SATA использует 7-контактный разъём вместо 40-контактного разъёма у PATA. SATA-кабель имеет меньшую
Слайд 35G — заземление (англ. Ground)
R — зарезервировано
D1+,D1−,D2+,D2− — два канала передачи данных
G — заземление (англ. Ground)
R — зарезервировано
D1+,D1−,D2+,D2− — два канала передачи данных
Слайд 36Интерфейс SATA II
Введен с 2004 г. Увеличилась пропускная способность (со 150 до
Интерфейс SATA II
Введен с 2004 г. Увеличилась пропускная способность (со 150 до
Слайд 37RAID (англ. redundant array of independent/inexpensive disks) — дисковый массив независимых дисков.
RAID (англ. redundant array of independent/inexpensive disks) — дисковый массив независимых дисков.
Слайд 38RAID5 использует независимый доступ к дискам, так что запросы к разным дискам
RAID5 использует независимый доступ к дискам, так что запросы к разным дискам
Слайд 39RAID50 объединяет отказоустойчивость и высокую скорость обработки транзакций RAID5 с высокой скоростью
RAID50 объединяет отказоустойчивость и высокую скорость обработки транзакций RAID5 с высокой скоростью
 Колебательный контур
Колебательный контур Моя будущая профессия учитель
Моя будущая профессия учитель Сладкие блюда
Сладкие блюда Вводный вебинар
Вводный вебинар Родительское собрание "Скоро в школу"
Родительское собрание "Скоро в школу" Кабинет неспешного копирайтинга
Кабинет неспешного копирайтинга Элементы комбинаторики
Элементы комбинаторики Констит.строй 2021
Констит.строй 2021 Позитивные мысли
Позитивные мысли Создание военных блоков, локальные войны и вооруженные конфликты второй половины XX начала XXI веков
Создание военных блоков, локальные войны и вооруженные конфликты второй половины XX начала XXI веков Инновационное развитие машиностроительной промышленности России. Роль ИТ. Вызовы и реалии..
Инновационное развитие машиностроительной промышленности России. Роль ИТ. Вызовы и реалии.. Изменения в написании КР и ДР
Изменения в написании КР и ДР Установка и настройка веб-сервера Apache
Установка и настройка веб-сервера Apache Цветные металлы и сплавы
Цветные металлы и сплавы Развлекательный Комплекс «АКТЕРА»Общая информация
Развлекательный Комплекс «АКТЕРА»Общая информация Проект по английскому языку про Великобританию
Проект по английскому языку про Великобританию Спряжение глаголов в заданиях
Спряжение глаголов в заданиях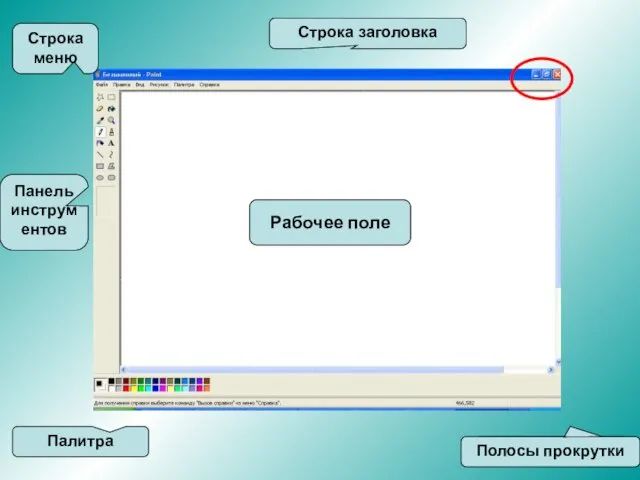 Что такое пиксель. Масштаб изображения
Что такое пиксель. Масштаб изображения Презентация на тему Семейство Папоротниковые
Презентация на тему Семейство Папоротниковые Philosophy
Philosophy  Математика и поэзия
Математика и поэзия Презентация на тему Неопределенный интеграл
Презентация на тему Неопределенный интеграл  Как устроен наш язык
Как устроен наш язык Alternative Energy Sources
Alternative Energy Sources  Анализ результатов ГИА9 классы 2010-2011качество подготовки
Анализ результатов ГИА9 классы 2010-2011качество подготовки Портфолио - профессиональный портрет школьного библиотекаря
Портфолио - профессиональный портрет школьного библиотекаря Как выращивают хлопок
Как выращивают хлопок Полезные для здоровья рецепты разных блюд
Полезные для здоровья рецепты разных блюд