- Общие теоретические основы управления техническими системами. Тема 1

Содержание
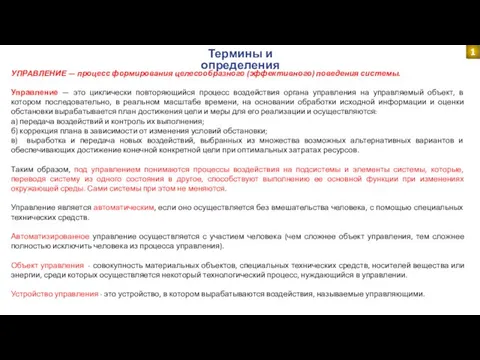
- 2. Термины и определения УПРАВЛЕНИЕ — процесс формирования целесообразного (эффективного) поведения системы. Управление — это циклически повторяющийся
- 3. Простейшие системы автоматического регулирования уровня жидкости При ручном регулировании человек-оператор, наблюдая за показанием датчика уровня у(t)(поплавка),
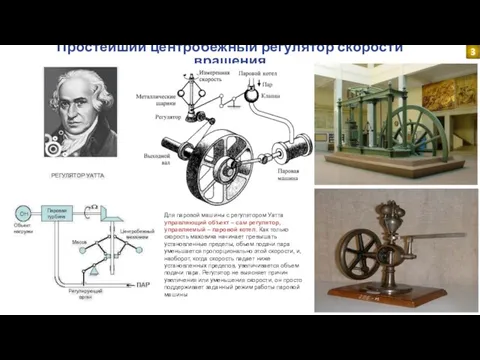
- 4. Простейший центробежный регулятор скорости вращения 3 Для паровой машины с регулятором Уатта управляющий объект – сам
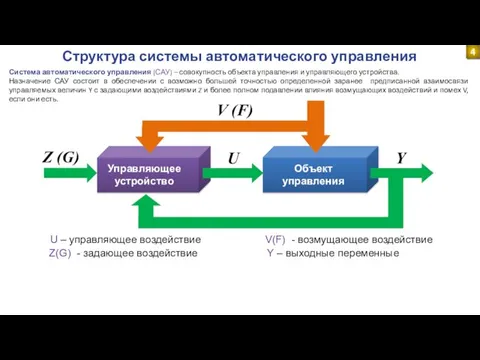
- 5. Структура системы автоматического управления Система автоматического управления (САУ) – совокупность объекта управления и управляющего устройства. Назначение
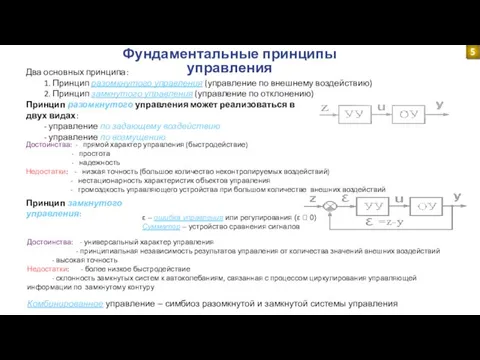
- 6. Фундаментальные принципы управления 5
- 7. Математическое описание системы управления: простейшие примеры 6 Математически описать систему управления - это значит найти оператор,
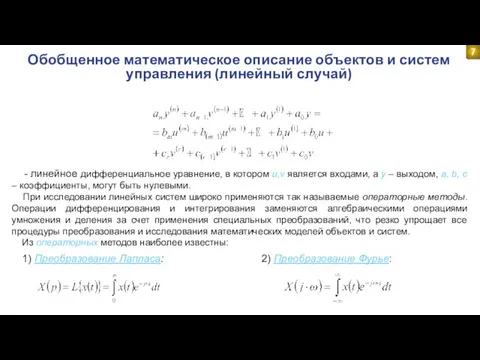
- 8. - линейное дифференциальное уравнение, в котором u,v является входами, а y – выходом, a, b, c
- 9. Применяем преобразование Лапласа к дифференциальному уравнению, с учетом нулевых начальных условий. Получим: при нулевом возмущающем воздействии:
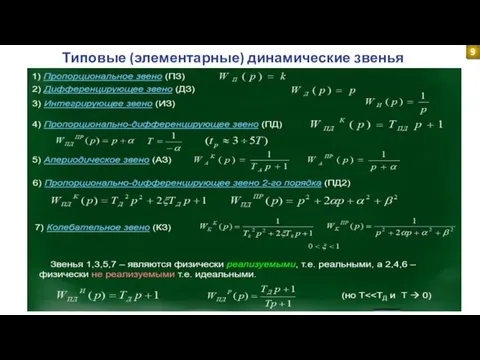
- 10. Типовые (элементарные) динамические звенья 9
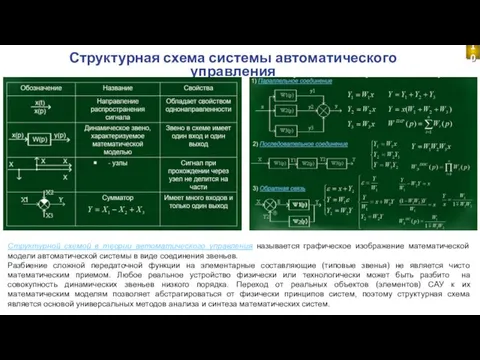
- 11. Структурная схема системы автоматического управления Структурной схемой в теории автоматического управления называется графическое изображение математической модели
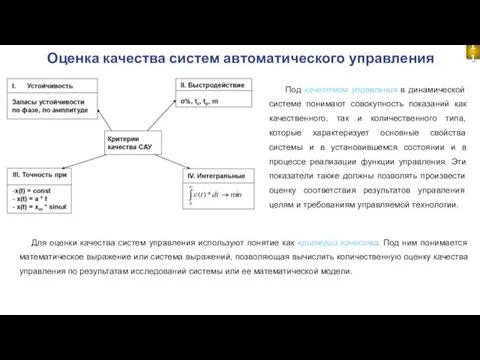
- 12. Оценка качества систем автоматического управления Под качеством управления в динамической системе понимают совокупность показаний как качественного,
- 13. Частотные характеристики линейных динамических звеньев и систем 12 Частотные характеристики любого линейного звена можно получить экспериментально,
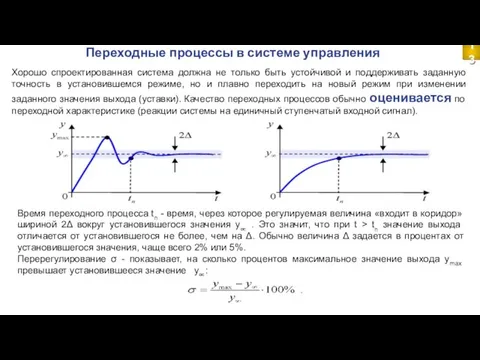
- 14. Переходные процессы в системе управления 13 Хорошо спроектированная система должна не только быть устойчивой и поддерживать
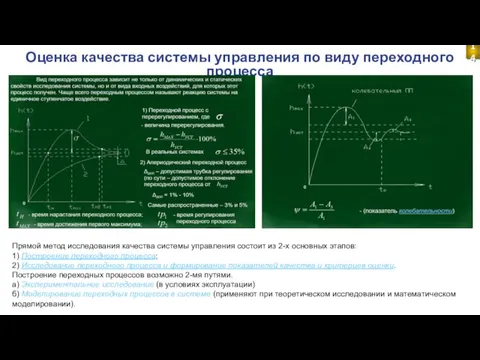
- 15. Оценка качества системы управления по виду переходного процесса Прямой метод исследования качества системы управления состоит из
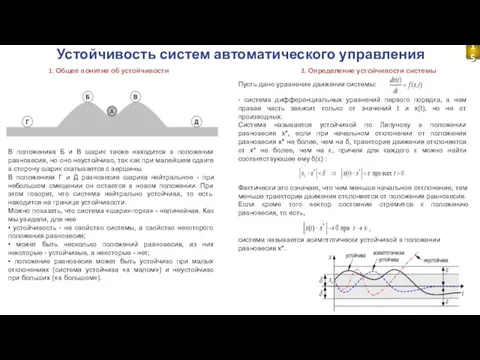
- 16. Устойчивость систем автоматического управления В положениях Б и В шарик также находится в положении равновесия, но
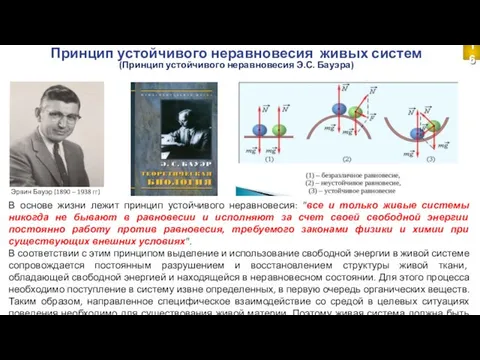
- 17. В основе жизни лежит принцип устойчивого неравновесия: "все и только живые системы никогда не бывают в
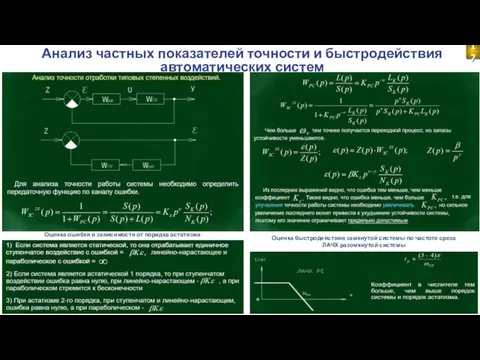
- 18. Анализ частных показателей точности и быстродействия автоматических систем 17
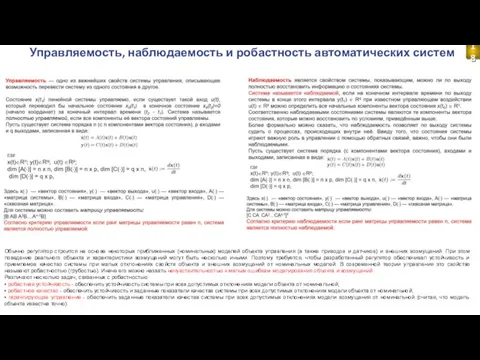
- 19. Управляемость, наблюдаемость и робастность автоматических систем Обычно регулятор строится на основе некоторых приближенных (номинальных) моделей объекта
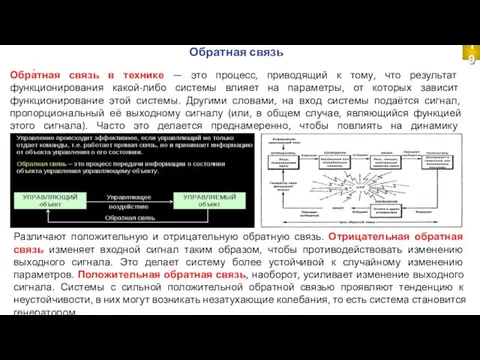
- 20. Обратная связь Обра́тная связь в технике — это процесс, приводящий к тому, что результат функционирования какой-либо
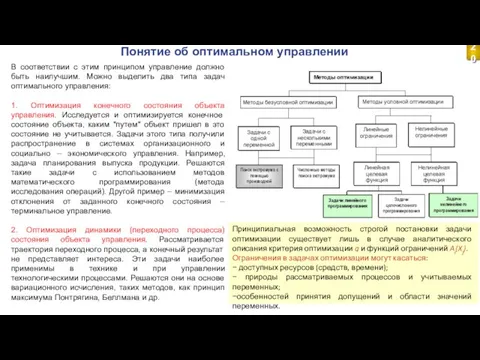
- 21. Понятие об оптимальном управлении 20 В соответствии с этим принципом управление должно быть наилучшим. Можно выделить
- 22. Классификация систем автоматического управления Классификацию САУ можно производить по различным принципам и признакам, но наиболее общую
- 23. Понятие об автоматизированных системах управления Автоматизированная система управления или АСУ — комплекс аппаратных и программных средств,
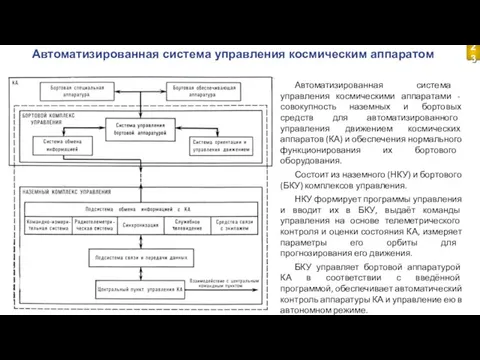
- 24. Автоматизированная система управления космическим аппаратом Автоматизированная система управления космическими аппаратами - совокупность наземных и бортовых средств
- 25. Наземный автоматизированный комплекс управления КА (НАКУ КА) Наземный автоматизированный комплекс управления КА (НАКУ КА) представляет собой
- 26. Термины и определения по ГОСТ Р 53802-2010 Автоматизированный наземный комплекс управления орбитальными средствами - совокупность технических
- 27. Структурная схема наземного комплекса управления межпланетными космическими аппаратами 26
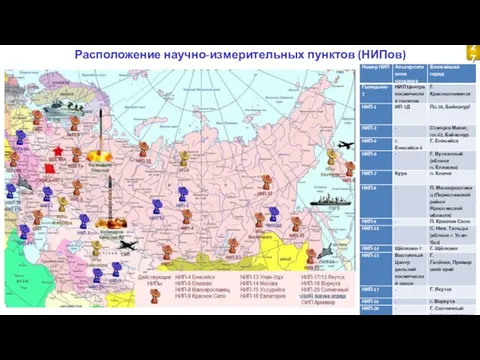
- 28. Расположение научно-измерительных пунктов (НИПов) 27
- 29. Рекомендуемая литература 28 Поляков К.Ю. Теория автоматического управления для «чайников». Санкт-Петербург, 2008 г Малышев В.В., Боброников
- 32. Скачать презентацию
Слайд 2Термины и определения
УПРАВЛЕНИЕ — процесс формирования целесообразного (эффективного) поведения системы.
Управление — это
Термины и определения
УПРАВЛЕНИЕ — процесс формирования целесообразного (эффективного) поведения системы.
Управление — это
Слайд 3Простейшие системы автоматического регулирования уровня жидкости
При ручном регулировании человек-оператор, наблюдая за показанием
Простейшие системы автоматического регулирования уровня жидкости
При ручном регулировании человек-оператор, наблюдая за показанием

Слайд 4Простейший центробежный регулятор скорости вращения
3
Для паровой машины с регулятором Уатта управляющий объект
Простейший центробежный регулятор скорости вращения
3
Для паровой машины с регулятором Уатта управляющий объект
Слайд 5Структура системы автоматического управления
Система автоматического управления (САУ) – совокупность объекта управления и
Структура системы автоматического управления
Система автоматического управления (САУ) – совокупность объекта управления и
Слайд 6Фундаментальные принципы управления
5
Фундаментальные принципы управления
5
Слайд 7Математическое описание системы управления: простейшие примеры
6
Математически описать систему управления - это значит
Математическое описание системы управления: простейшие примеры
6
Математически описать систему управления - это значит
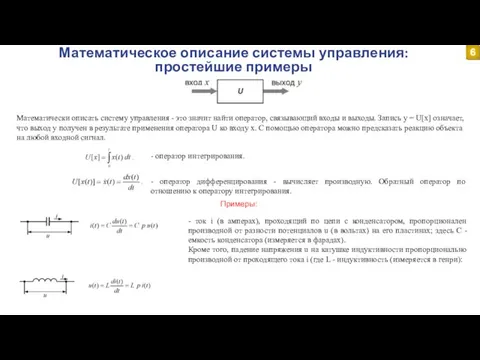
Слайд 8 - линейное дифференциальное уравнение, в котором u,v является входами, а y
- линейное дифференциальное уравнение, в котором u,v является входами, а y
Слайд 9 Применяем преобразование Лапласа к дифференциальному уравнению, с учетом нулевых начальных условий.
Применяем преобразование Лапласа к дифференциальному уравнению, с учетом нулевых начальных условий.

Слайд 10Типовые (элементарные) динамические звенья
9
Типовые (элементарные) динамические звенья
9
Слайд 11Структурная схема системы автоматического управления
Структурной схемой в теории автоматического управления называется графическое
Структурная схема системы автоматического управления
Структурной схемой в теории автоматического управления называется графическое
Слайд 12Оценка качества систем автоматического управления
Под качеством управления в динамической системе понимают
Оценка качества систем автоматического управления
Под качеством управления в динамической системе понимают
Слайд 13Частотные характеристики линейных динамических звеньев и систем
12
Частотные характеристики любого линейного звена
Частотные характеристики линейных динамических звеньев и систем
12
Частотные характеристики любого линейного звена

Слайд 14Переходные процессы в системе управления
13
Хорошо спроектированная система должна не только быть устойчивой
Переходные процессы в системе управления
13
Хорошо спроектированная система должна не только быть устойчивой
Слайд 15Оценка качества системы управления по виду переходного процесса
Прямой метод исследования качества системы
Оценка качества системы управления по виду переходного процесса
Прямой метод исследования качества системы
Слайд 16Устойчивость систем автоматического управления
В положениях Б и В шарик также находится в
Устойчивость систем автоматического управления
В положениях Б и В шарик также находится в
Слайд 17В основе жизни лежит принцип устойчивого неравновесия: "все и только живые системы
В основе жизни лежит принцип устойчивого неравновесия: "все и только живые системы
Слайд 18Анализ частных показателей точности и быстродействия
автоматических систем
17
Анализ частных показателей точности и быстродействия
автоматических систем
17
Слайд 19Управляемость, наблюдаемость и робастность автоматических систем
Обычно регулятор строится на основе некоторых приближенных
Управляемость, наблюдаемость и робастность автоматических систем
Обычно регулятор строится на основе некоторых приближенных
Слайд 20Обратная связь
Обра́тная связь в технике — это процесс, приводящий к тому, что
Обратная связь
Обра́тная связь в технике — это процесс, приводящий к тому, что
Слайд 21Понятие об оптимальном управлении
20
В соответствии с этим принципом управление должно быть наилучшим.
Понятие об оптимальном управлении
20
В соответствии с этим принципом управление должно быть наилучшим.
Слайд 22Классификация систем автоматического управления
Классификацию САУ можно производить по различным принципам и признакам,
Классификация систем автоматического управления
Классификацию САУ можно производить по различным принципам и признакам,

Слайд 23Понятие об автоматизированных системах управления
Автоматизированная система управления или АСУ — комплекс аппаратных и программных средств,
Понятие об автоматизированных системах управления
Автоматизированная система управления или АСУ — комплекс аппаратных и программных средств,

Слайд 24Автоматизированная система управления космическим аппаратом
Автоматизированная система управления космическими аппаратами - совокупность наземных
Автоматизированная система управления космическим аппаратом
Автоматизированная система управления космическими аппаратами - совокупность наземных
Слайд 25Наземный автоматизированный комплекс управления КА (НАКУ КА)
Наземный автоматизированный комплекс управления КА
Наземный автоматизированный комплекс управления КА (НАКУ КА)
Наземный автоматизированный комплекс управления КА
Слайд 26Термины и определения по ГОСТ Р 53802-2010
Автоматизированный наземный комплекс управления орбитальными средствами
Термины и определения по ГОСТ Р 53802-2010
Автоматизированный наземный комплекс управления орбитальными средствами
Слайд 27Структурная схема наземного комплекса управления межпланетными космическими аппаратами
26
Структурная схема наземного комплекса управления межпланетными космическими аппаратами
26

Слайд 28Расположение научно-измерительных пунктов (НИПов)
27
Расположение научно-измерительных пунктов (НИПов)
27
Слайд 29Рекомендуемая литература
28
Поляков К.Ю. Теория автоматического управления для «чайников». Санкт-Петербург, 2008 г
Малышев В.В.,
Рекомендуемая литература
28
Поляков К.Ю. Теория автоматического управления для «чайников». Санкт-Петербург, 2008 г
Малышев В.В.,

 ЮРИЙ ГАГАРИН
ЮРИЙ ГАГАРИН Солнечная система
Солнечная система Космодром ЧМЗ — 70, созвездие Кассиопея
Космодром ЧМЗ — 70, созвездие Кассиопея Планеты солнечной системы. Солнце
Планеты солнечной системы. Солнце День космонавтики. 60 лет со дня первого полета человека в космос
День космонавтики. 60 лет со дня первого полета человека в космос Челябинского метеорит
Челябинского метеорит Солнечная система
Солнечная система Презентация на тему Эволюция звезд
Презентация на тему Эволюция звезд  Планеты Солнечной системы
Планеты Солнечной системы Относительность механического движения на примере суточного и годичного движения небесных тел
Относительность механического движения на примере суточного и годичного движения небесных тел Вселенная бесконечна
Вселенная бесконечна Презентация на тему Ионосфера
Презентация на тему Ионосфера  Тест астрономии
Тест астрономии Путешествие от Солнца до Плутона. Часть 3
Путешествие от Солнца до Плутона. Часть 3 Космос. От прошлого к будущему
Космос. От прошлого к будущему Путешествие в космос. Игра
Путешествие в космос. Игра Викторина. Вопрос и ответ. Образцы и приёмы
Викторина. Вопрос и ответ. Образцы и приёмы Energy from the Sun
Energy from the Sun Млечный Путь – наша Галактика
Млечный Путь – наша Галактика Общая характеристика планет-гигантов
Общая характеристика планет-гигантов Юрий Гагарин – первый в космосе
Юрий Гагарин – первый в космосе Природоведение. Изучение Вселенной - презентация_
Природоведение. Изучение Вселенной - презентация_ Планеты земной группы (11 класс)
Планеты земной группы (11 класс) Сәуірдің жиырма сегізі Сынып жұмысы Қайталау сабағы
Сәуірдің жиырма сегізі Сынып жұмысы Қайталау сабағы Созвездия. Мифы и легенды
Созвездия. Мифы и легенды Космонавты России
Космонавты России Законы движения планет Солнечной Системы. 10 Класс
Законы движения планет Солнечной Системы. 10 Класс Черные дыры
Черные дыры