- Моделирование процессов преобразования сигналов и помех линейными и нелинейными звеньями

Содержание
- 2. Рассматриваемые вопросы: Моделирование линейных звеньев методом инвариативности импульсной характеристики; Моделирование линейных звеньев методом билинейного преобразования.
- 3. Моделирование линейных звеньев Любое преобразующее радиосигнал устройство может быть представлено в виде совокупности линейных и нелинейных
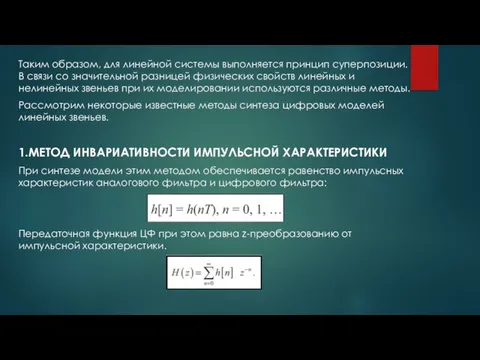
- 4. Таким образом, для линейной системы выполняется принцип суперпозиции. В связи со значительной разницей физических свойств линейных
- 5. Допустим, что аналоговый фильтр имеет передаточную функцию вида: Где Ак = H(s)(S –Sk) Тогда импульсная характеристика
- 6. Подставляя формулы h(t) и h[n] получим коэффициент передачи ЦФ: Учитывая, что умножение z-преобразование цифрового сигнала на
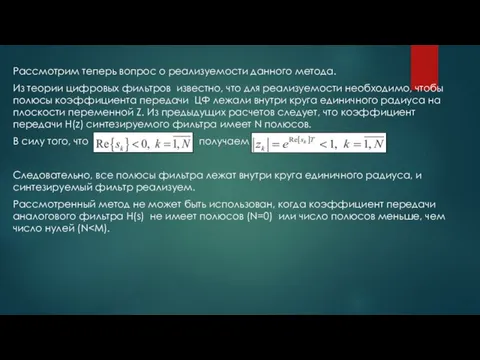
- 7. Рассмотрим теперь вопрос о реализуемости данного метода. Из теории цифровых фильтров известно, что для реализуемости необходимо,
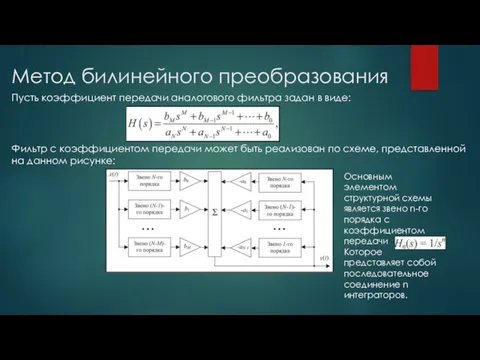
- 8. Метод билинейного преобразования Пусть коэффициент передачи аналогового фильтра задан в виде: Фильтр с коэффициентом передачи может
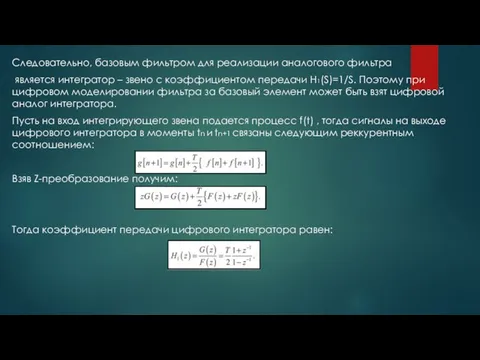
- 9. Следовательно, базовым фильтром для реализации аналогового фильтра является интегратор – звено с коэффициентом передачи H1(S)=1/S. Поэтому
- 11. Скачать презентацию
Слайд 2Рассматриваемые вопросы:
Моделирование линейных звеньев методом инвариативности импульсной характеристики;
Моделирование линейных звеньев методом билинейного
Рассматриваемые вопросы:
Моделирование линейных звеньев методом инвариативности импульсной характеристики;
Моделирование линейных звеньев методом билинейного
Слайд 3Моделирование линейных звеньев
Любое преобразующее радиосигнал устройство может быть представлено в виде совокупности
Моделирование линейных звеньев
Любое преобразующее радиосигнал устройство может быть представлено в виде совокупности
Слайд 4Таким образом, для линейной системы выполняется принцип суперпозиции. В связи со значительной
Таким образом, для линейной системы выполняется принцип суперпозиции. В связи со значительной
Слайд 5Допустим, что аналоговый фильтр имеет передаточную функцию вида:
Где Ак = H(s)(S –Sk)
Тогда
Допустим, что аналоговый фильтр имеет передаточную функцию вида:
Где Ак = H(s)(S –Sk)
Тогда

Слайд 6 Подставляя формулы h(t) и h[n] получим коэффициент передачи ЦФ:
Учитывая, что
Подставляя формулы h(t) и h[n] получим коэффициент передачи ЦФ:
Учитывая, что
![Подставляя формулы h(t) и h[n] получим коэффициент передачи ЦФ: Учитывая, что умножение](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/904550/slide-5.jpg)
Слайд 7Рассмотрим теперь вопрос о реализуемости данного метода.
Из теории цифровых фильтров известно, что
Рассмотрим теперь вопрос о реализуемости данного метода.
Из теории цифровых фильтров известно, что
Слайд 8Метод билинейного преобразования
Пусть коэффициент передачи аналогового фильтра задан в виде:
Фильтр с коэффициентом
Метод билинейного преобразования
Пусть коэффициент передачи аналогового фильтра задан в виде:
Фильтр с коэффициентом
Слайд 9Следовательно, базовым фильтром для реализации аналогового фильтра
является интегратор – звено с
Следовательно, базовым фильтром для реализации аналогового фильтра
является интегратор – звено с
 Исследователи света и цвета
Исследователи света и цвета =?utf-8?B?0JrQstCw0L3RgtC+0LLRi9C1INC_0L7RgdGC0YPQu9Cw0YLRiyDQkdC+0YDQsC4ucHB0eA==?=
=?utf-8?B?0JrQstCw0L3RgtC+0LLRi9C1INC_0L7RgdGC0YPQu9Cw0YLRiyDQkdC+0YDQsC4ucHB0eA==?= Маятниковые копры
Маятниковые копры Презентация на тему Никола Тесла
Презентация на тему Никола Тесла  Свободные и вынужденные электромагнитные колебания. Колебательный контур. Превращение энергии в колебательных системах
Свободные и вынужденные электромагнитные колебания. Колебательный контур. Превращение энергии в колебательных системах Механическая работа. Единицы работы
Механическая работа. Единицы работы Преломление света. Дисперсия. Цвета тел. (6 класс)
Преломление света. Дисперсия. Цвета тел. (6 класс) Понятие вектора в пространстве
Понятие вектора в пространстве Опыт Эрстеда. Магнитное поле тока. Правило правой руки
Опыт Эрстеда. Магнитное поле тока. Правило правой руки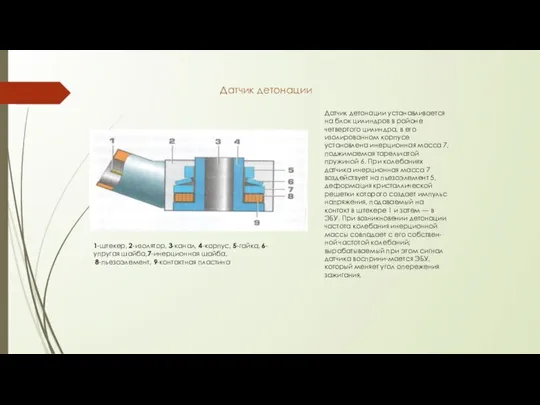 Датчик детонации с подогревом и без подогрева в автомобиле
Датчик детонации с подогревом и без подогрева в автомобиле Космические скорости. 10 класс
Космические скорости. 10 класс Электрические цепи. Тема 11
Электрические цепи. Тема 11 Тезаурус
Тезаурус Поляризация света
Поляризация света Электролиз. Удивительный мир гальваники
Электролиз. Удивительный мир гальваники Инструкция по сборке стальной рамы Prusa i3 Steel Pro для модификации 3d принтера Anet A6
Инструкция по сборке стальной рамы Prusa i3 Steel Pro для модификации 3d принтера Anet A6 Реактивная сила
Реактивная сила Шкала звуковых частот
Шкала звуковых частот Презентация на тему Сила Ампера
Презентация на тему Сила Ампера  Задания по механике
Задания по механике Физика космоса, кружок. Космология в ОТО
Физика космоса, кружок. Космология в ОТО Фейерверки. Скорость звука
Фейерверки. Скорость звука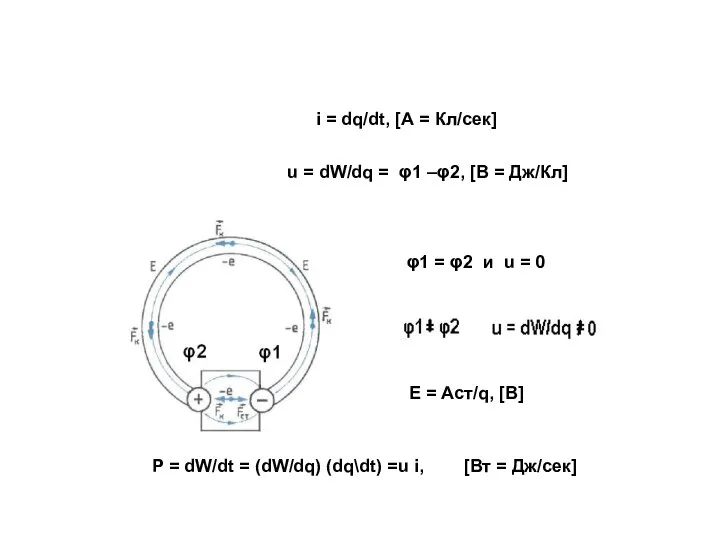 Определение тока и напряжения в идеальных элементах
Определение тока и напряжения в идеальных элементах Военные автомобили СССР
Военные автомобили СССР Люминесценция и светящиеся обои
Люминесценция и светящиеся обои Статистическая радиотехника. Узкополосный случайный процесс
Статистическая радиотехника. Узкополосный случайный процесс методичка1 - Расчет тайминга движущихся предметов
методичка1 - Расчет тайминга движущихся предметов Классификация электротехнических материалов
Классификация электротехнических материалов