- Определение эргономических показателей при проведении сертификации ДСМ

Содержание
- 2. ЦЕЛЬ РАБОТЫ – определение эргономических показателей эксплуатационных свойств дорожно-строительных машин при проведении сертификации.
- 3. ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ под базовым эргономическим образцом понимают реальную или гипотетическую машину, обладающую совокупностью всех эргономических
- 4. Эргономический уровень изделия - это относительная характеристика – совокупность всех эргономических свойств оцениваемой машины, основанная на
- 5. Эргономическое свойство машины проявляется в системе «человек – изделие – среда использования» для удовлетворения эргономических требований.
- 6. Единичный эргономичный параметр качества машины характеризует одно из его эргономических свойств. Комплексный эргономический показатель качества машины
- 7. КОМПЛЕКСНЫЕ ЭРГОНОМИЧЕСКИЕ ПОКАЗАТЕЛИ КАЧЕСТВА ПРОМЫШЛЕННЫХ ИЗДЕЛИЙ 1. АНТРОПОМЕТРИЧЕСКИЕ ПОКАЗАТЕЛИ Показатели, характеризующие степень соответствия машины эргономическим требованиям
- 8. 2. ФИЗИОЛОГИЧЕСКИЕ ПОКАЗАТЕЛИ , характеризуют степень соответствия машины эргономическим требованиям к объекту и скорости рабочих движений
- 9. 3. ПСИХОЛОГИЧЕСКИЕ ПОКАЗАТЕЛИ характеризуют степень соответствия машины эргономическим требованиям и средствам информационного взаимодействия человека и машины,
- 10. 4. гигиенические показатели, характеризуют непосредственное влияние среды использования и опосредованное влияние машины через среду на эффективность
- 11. Контрольная точка сиденья (КТС) – точка в средней вертикальной плоскости. КТС является постоянной точкой по отношению
- 12. Точка SIP – контрольная точка сиденья по ГОСТ Р ИСО 5353-2012, определяемая при номинальных регулировках сиденья.
- 13. ОСНОВНЫЕ ОРГАНЫ УПРАВЛЕНИЯ – органы управления, часто или постоянно используемые оператором, например, это могут быть: органы
- 14. ВТОРОСТЕПЕННЫЕ ОРГАНЫ УПРАВЛЕНИЯ – органы управления, редко используемые оператором ( переключатели освещения, снегоочистителя, стартера, отопителя, кондиционера
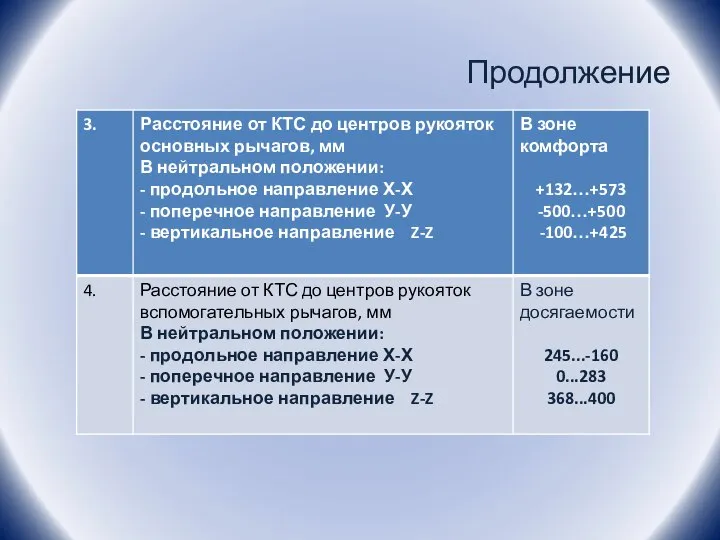
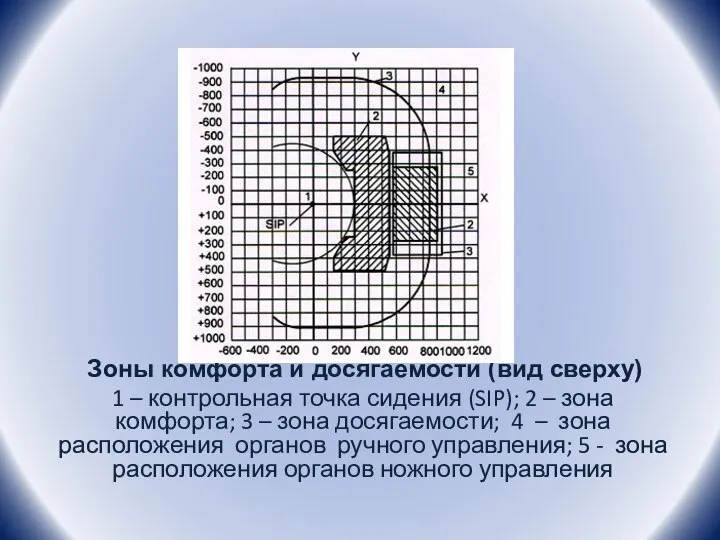
- 15. ЗОНЫ КОМФОРТА – предпочтительные зоны расположения основных органов ручного и ножного управления. Расположенные в этих зонах
- 16. ЗОНЫ ДОСЯГАЕМОСТИ – зоны расположения второстепенных органов ручного и ножного управления. Расположенные в этих зонах органы
- 17. ОРГАНЫ УПРАВЛЕНИЯ МАШИНОЙ
- 18. 1- рулевое колесо; 2- панель приборов; 3- рычаг переключения режима КПП; 4- рычаг реверса; 5- рычаг
- 19. .. рулевое колесо, рычаг переключения режима КПП; рычаг реверса, педали тормоза и газа
- 20. . рычаг стояночного тормоза
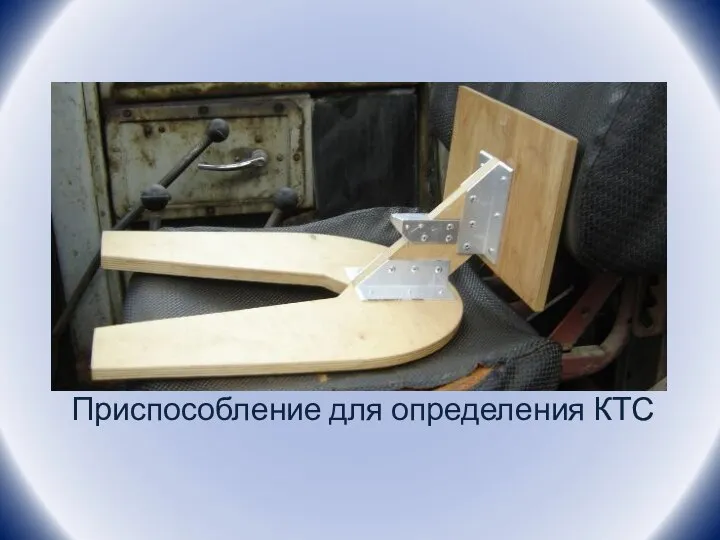
- 21. .. Приспособление для определения КТС
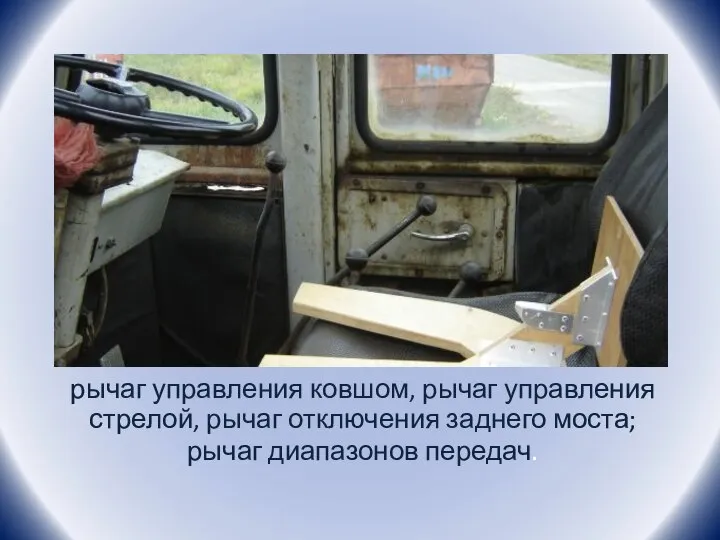
- 22. .. рычаг управления ковшом, рычаг управления стрелой, рычаг отключения заднего моста; рычаг диапазонов передач.
- 23. Гидрораспределитель и тяги, идущие к рукояткам управления ковшом и стрелой рабочего оборудования
- 24. рычаг включения РОМ, рукоятка ручного изменения оборотов ДВС
- 25. МЕТОДИКА И ПОСЛЕДОВАТЕЛЬНОСТЬ ВЫПОЛНЕНИЯ РАБОТЫ
- 26. 1 .Определение усилия на органах управления дорожной машины. 2. Проведение сравнения значений усилий с нормативными значениями
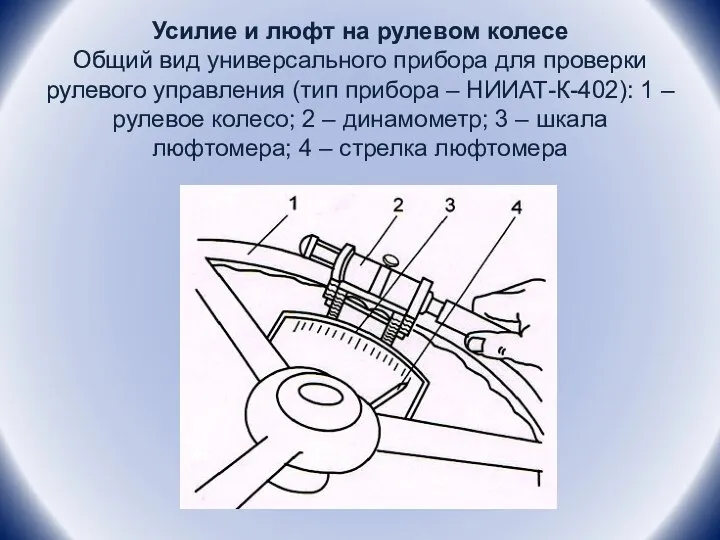
- 27. Усилие и люфт на рулевом колесе Общий вид универсального прибора для проверки рулевого управления (тип прибора
- 28. В соответствии с ГОСТ 12.2.019-2005 п.3.8 и ГОСТ Р 31555-2012 п.6.6 нормативное значение люфта рулевого управления
- 29. ИЗМЕРЕНИЕ УСИЛИЯ НА РУЛЕВОМ КОЛЕСЕ Для измерения касательного усилия на рулевом колесе необходимо взять одну из
- 30. .. Приспособление для определения КТС
- 31. 3. Оценка легкости управления машиной коэффициентом напряженности управления Кну, определяемым по формуле:
- 32. где Рi- усилие на i – м рычаге или педали, определенное по заданию, Н; Piн -
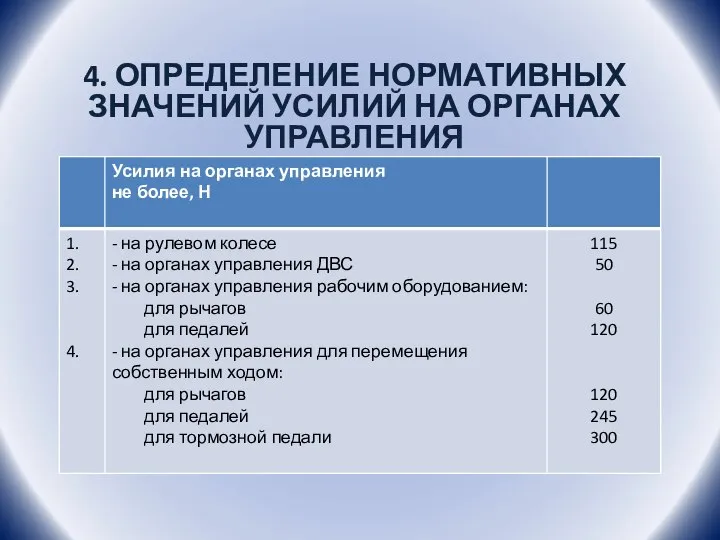
- 33. 4. ОПРЕДЕЛЕНИЕ НОРМАТИВНЫХ ЗНАЧЕНИЙ УСИЛИЙ НА ОРГАНАХ УПРАВЛЕНИЯ
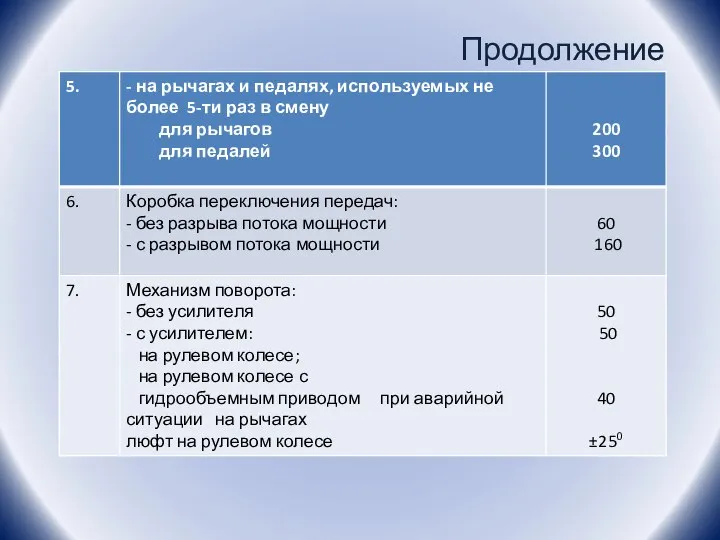
- 34. Продолжение
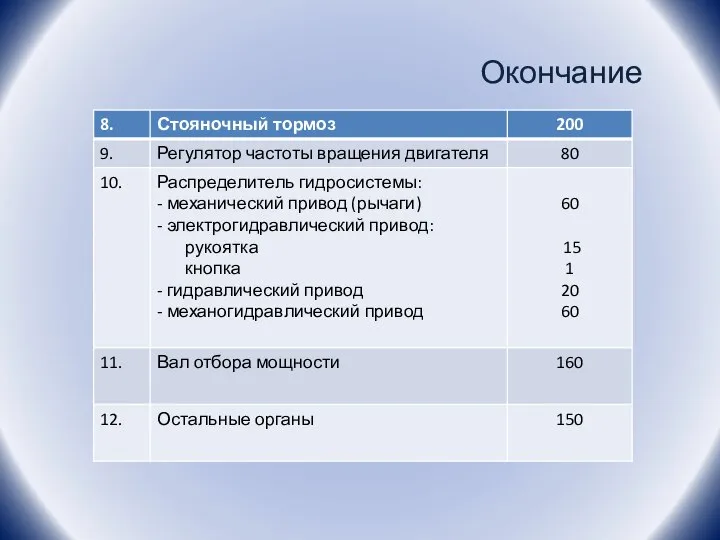
- 35. Окончание
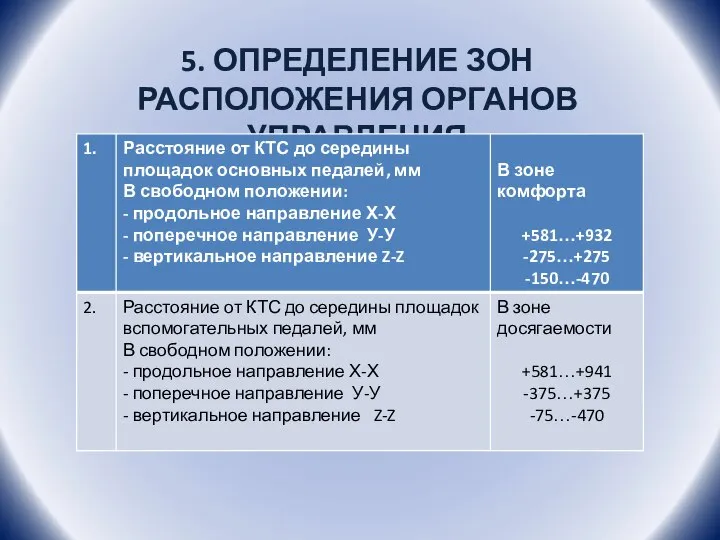
- 36. 5. ОПРЕДЕЛЕНИЕ ЗОН РАСПОЛОЖЕНИЯ ОРГАНОВ УПРАВЛЕНИЯ
- 37. Продолжение
- 38. Определение координаты контрольной точки сиденья (КТС) (старая редакция ГОСТ) а) установите на центр подушки груз, равный
- 39. г) в вертикальной плоскости, проходящей через оси X´ и Z´. С помощью мерной линейки или рейки
- 40. д) от полученной горизонтальной прямой отложите в масштабе на чертеже 97 мм и проведите через полученную
- 41. Определение координаты контрольной точки сиденья (КТС) (новая редакция по ГОСТ Р 5353-2012)
- 42. Сиденье с устройством SIP
- 43. Определение контрольной точки сиденья (SIP) SIP следует определять с помощью устройства, представленного выше нижеследующих процедур. Подготовка
- 44. Размещение устройства Помещают устройство без дополнительных масс сбоку от центральной плоскости на подушку сиденья, сдвинув его
- 45. Устанавливают дополнительные массы, доведя общую массу устройства от 26 ± 1 до (65 11) кг, центр
- 46. Измерение Проводят измерения на каждой стороне устройства в точках на равном расстоянии от центральной вертикальной плоскости.
- 47. 6. Оценка расположение органов управления в кабине машины с помощью коэффициента удобства расположения органов управления (коэффициента
- 48. где Nок- количество основных рычагов и педалей, попавших в зону комфорта; Nвд- количество второстепенных рычагов и
- 49. ЗОНЫ КОМФОРТА И ДОСЯГАЕМОСТИ
- 50. ОРГАНЫ УПРАВЛЕНИЯ МАШИНОЙ
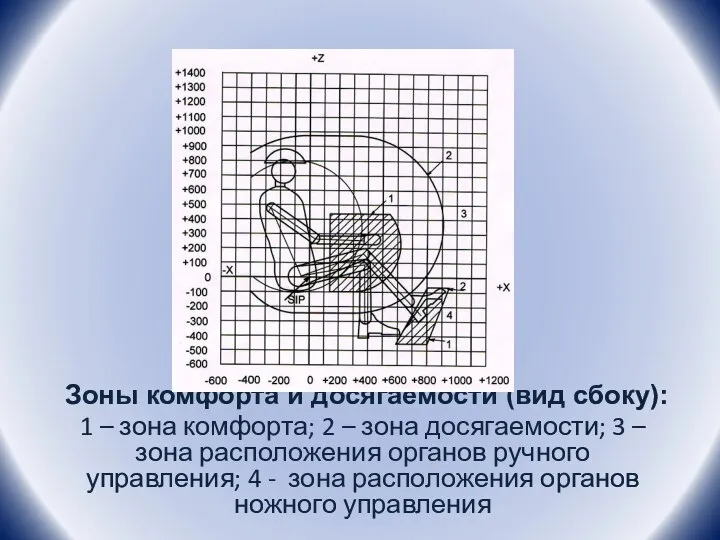
- 51. .. Зоны комфорта и досягаемости (вид сбоку): 1 – зона комфорта; 2 – зона досягаемости; 3
- 52. Зоны комфорта и досягаемости (вид сверху) 1 – контрольная точка сидения (SIP); 2 – зона комфорта;
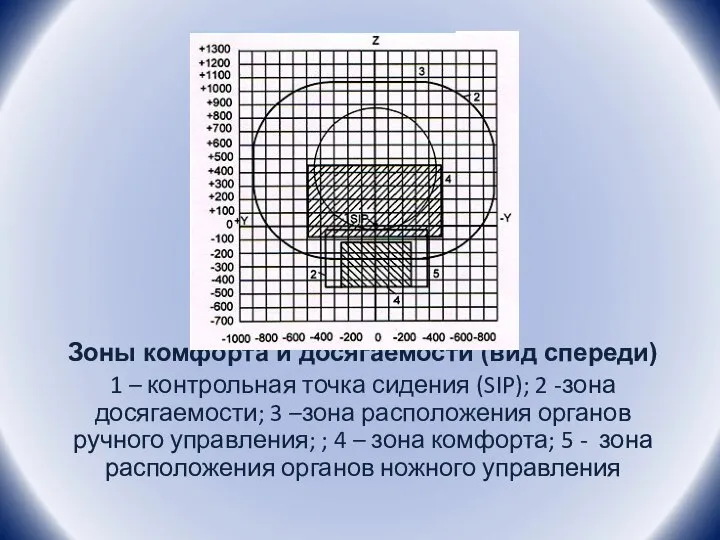
- 53. Зоны комфорта и досягаемости (вид спереди) 1 – контрольная точка сидения (SIP); 2 -зона досягаемости; 3
- 54. 7. Формулирование заключения о прохождении машиной сертификации с точки зрения требований эргономических показателей.
- 55. Стандартные условия определения расположения органов управления [ ГОСТ 27258-87 (ИСО 6682-86)] 1. Зоны расположения органов управления
- 56. 1.2. Для операторов высокого и низкого роста сиденье устанавливают в номинальное положение по высоте. Вертикальную регулировку
- 57. 1.3. Продольная регулировка сиденья – 150 мм. Для оператора низкого роста сиденья устанавливают в крайнее переднее
- 58. 1.4. Зоны расположения органов управления на машинах, имеющих продольную регулировку сиденья от 100 до 150 мм,
- 59. ТРЕБОВАНИЯ К ОФОРМЛЕНИЮ ОТЧЕТА 1. Отчет выполняется на листах формата А4, с оформлением титульного листа в
- 60. 4. Расчет коэффициентов Кну и Кком производится по формулам с обязательной подстановкой цифровых значений 5. Вывод
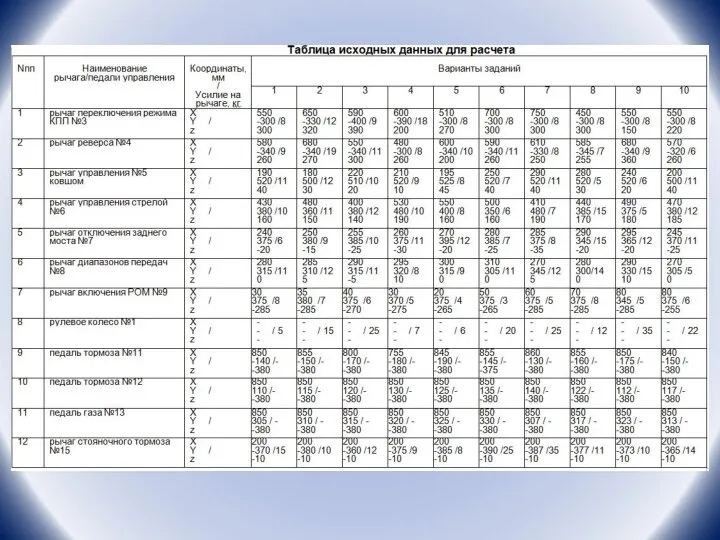
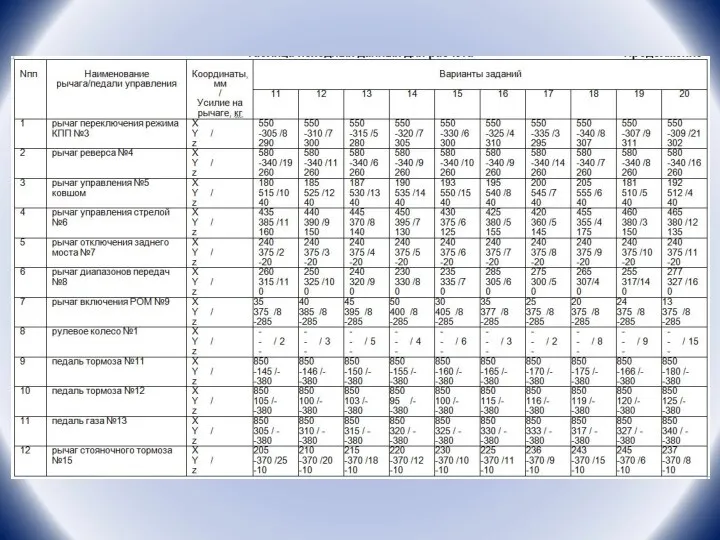
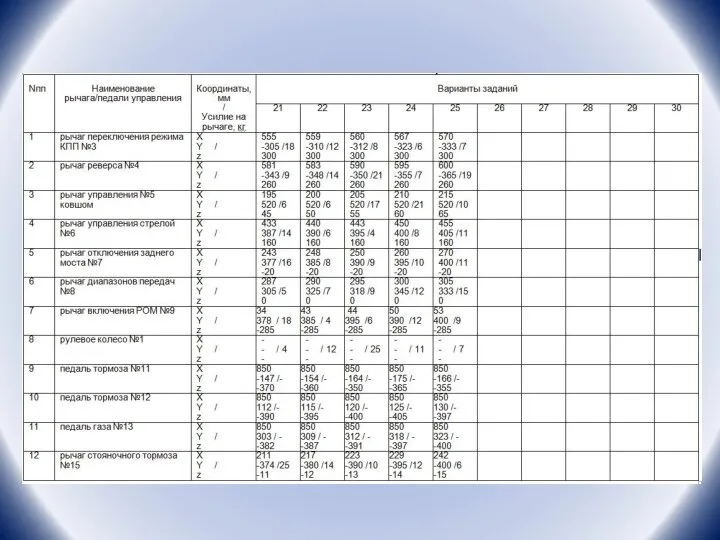
- 61. Варианты заданий
- 66. Скачать презентацию
Слайд 2ЦЕЛЬ РАБОТЫ –
определение эргономических показателей эксплуатационных свойств дорожно-строительных машин при проведении
ЦЕЛЬ РАБОТЫ –
определение эргономических показателей эксплуатационных свойств дорожно-строительных машин при проведении
Слайд 3ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ
под базовым эргономическим образцом понимают реальную или гипотетическую машину,
ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ
под базовым эргономическим образцом понимают реальную или гипотетическую машину,
Слайд 4 Эргономический уровень изделия - это относительная характеристика – совокупность всех эргономических
Эргономический уровень изделия - это относительная характеристика – совокупность всех эргономических
Слайд 5 Эргономическое свойство машины проявляется в системе «человек – изделие – среда
Эргономическое свойство машины проявляется в системе «человек – изделие – среда
Слайд 6 Единичный эргономичный параметр качества машины характеризует одно из его эргономических свойств.
Единичный эргономичный параметр качества машины характеризует одно из его эргономических свойств.
Слайд 7
КОМПЛЕКСНЫЕ ЭРГОНОМИЧЕСКИЕ ПОКАЗАТЕЛИ КАЧЕСТВА ПРОМЫШЛЕННЫХ ИЗДЕЛИЙ
1. АНТРОПОМЕТРИЧЕСКИЕ ПОКАЗАТЕЛИ
Показатели, характеризующие степень
КОМПЛЕКСНЫЕ ЭРГОНОМИЧЕСКИЕ ПОКАЗАТЕЛИ КАЧЕСТВА ПРОМЫШЛЕННЫХ ИЗДЕЛИЙ 1. АНТРОПОМЕТРИЧЕСКИЕ ПОКАЗАТЕЛИ Показатели, характеризующие степень
Слайд 82. ФИЗИОЛОГИЧЕСКИЕ ПОКАЗАТЕЛИ , характеризуют степень соответствия машины эргономическим требованиям к объекту
2. ФИЗИОЛОГИЧЕСКИЕ ПОКАЗАТЕЛИ , характеризуют степень соответствия машины эргономическим требованиям к объекту
Слайд 93. ПСИХОЛОГИЧЕСКИЕ ПОКАЗАТЕЛИ характеризуют степень соответствия машины эргономическим требованиям и средствам информационного
3. ПСИХОЛОГИЧЕСКИЕ ПОКАЗАТЕЛИ характеризуют степень соответствия машины эргономическим требованиям и средствам информационного
Слайд 104. гигиенические показатели, характеризуют непосредственное влияние среды использования и опосредованное влияние машины
4. гигиенические показатели, характеризуют непосредственное влияние среды использования и опосредованное влияние машины
Слайд 11Контрольная точка сиденья (КТС) – точка в средней вертикальной плоскости. КТС является
Контрольная точка сиденья (КТС) – точка в средней вертикальной плоскости. КТС является

Слайд 12Точка SIP – контрольная точка сиденья по ГОСТ Р ИСО 5353-2012, определяемая
Точка SIP – контрольная точка сиденья по ГОСТ Р ИСО 5353-2012, определяемая
Слайд 13ОСНОВНЫЕ ОРГАНЫ УПРАВЛЕНИЯ –
органы управления, часто или постоянно используемые оператором, например,
органы управления, часто или постоянно используемые оператором, например,
Слайд 14ВТОРОСТЕПЕННЫЕ ОРГАНЫ УПРАВЛЕНИЯ –
органы управления, редко используемые оператором
( переключатели освещения,
органы управления, редко используемые оператором
( переключатели освещения,
Слайд 15ЗОНЫ КОМФОРТА
– предпочтительные зоны расположения основных органов ручного и ножного управления.
– предпочтительные зоны расположения основных органов ручного и ножного управления.
Слайд 16ЗОНЫ ДОСЯГАЕМОСТИ
– зоны расположения второстепенных органов ручного и ножного управления. Расположенные
ЗОНЫ ДОСЯГАЕМОСТИ
– зоны расположения второстепенных органов ручного и ножного управления. Расположенные
Слайд 17ОРГАНЫ УПРАВЛЕНИЯ МАШИНОЙ
ОРГАНЫ УПРАВЛЕНИЯ МАШИНОЙ

Слайд 181- рулевое колесо; 2- панель приборов;
3- рычаг переключения режима КПП;
4-
3- рычаг переключения режима КПП;
4-
Слайд 19..
рулевое колесо, рычаг переключения режима КПП; рычаг реверса, педали тормоза и газа
рулевое колесо, рычаг переключения режима КПП; рычаг реверса, педали тормоза и газа

Слайд 20
. рычаг стояночного тормоза
. рычаг стояночного тормоза

Слайд 21..
Приспособление для определения КТС
Приспособление для определения КТС
Слайд 22..
рычаг управления ковшом, рычаг управления стрелой, рычаг отключения заднего моста; рычаг диапазонов
рычаг управления ковшом, рычаг управления стрелой, рычаг отключения заднего моста; рычаг диапазонов
Слайд 23
Гидрораспределитель и тяги, идущие к рукояткам управления ковшом и стрелой рабочего оборудования
Гидрораспределитель и тяги, идущие к рукояткам управления ковшом и стрелой рабочего оборудования

Слайд 24
рычаг включения РОМ, рукоятка ручного изменения оборотов ДВС
рычаг включения РОМ, рукоятка ручного изменения оборотов ДВС

Слайд 25МЕТОДИКА И ПОСЛЕДОВАТЕЛЬНОСТЬ ВЫПОЛНЕНИЯ РАБОТЫ
МЕТОДИКА И ПОСЛЕДОВАТЕЛЬНОСТЬ ВЫПОЛНЕНИЯ РАБОТЫ
Слайд 261 .Определение усилия на органах управления дорожной машины.
2. Проведение сравнения значений усилий
1 .Определение усилия на органах управления дорожной машины.
2. Проведение сравнения значений усилий
Слайд 27
Усилие и люфт на рулевом колесе
Общий вид универсального прибора для проверки рулевого
Усилие и люфт на рулевом колесе Общий вид универсального прибора для проверки рулевого
Слайд 28В соответствии с ГОСТ 12.2.019-2005 п.3.8 и ГОСТ Р 31555-2012 п.6.6 нормативное
В соответствии с ГОСТ 12.2.019-2005 п.3.8 и ГОСТ Р 31555-2012 п.6.6 нормативное
Слайд 29ИЗМЕРЕНИЕ УСИЛИЯ НА РУЛЕВОМ КОЛЕСЕ
Для измерения касательного усилия на рулевом колесе необходимо
ИЗМЕРЕНИЕ УСИЛИЯ НА РУЛЕВОМ КОЛЕСЕ
Для измерения касательного усилия на рулевом колесе необходимо
Слайд 30..
Приспособление для определения КТС
Приспособление для определения КТС

Слайд 313. Оценка легкости управления машиной коэффициентом напряженности управления Кну, определяемым по формуле:
3. Оценка легкости управления машиной коэффициентом напряженности управления Кну, определяемым по формуле:
Слайд 32где Рi- усилие на i – м рычаге или педали, определенное по
Слайд 33
4. ОПРЕДЕЛЕНИЕ НОРМАТИВНЫХ ЗНАЧЕНИЙ УСИЛИЙ НА ОРГАНАХ УПРАВЛЕНИЯ
4. ОПРЕДЕЛЕНИЕ НОРМАТИВНЫХ ЗНАЧЕНИЙ УСИЛИЙ НА ОРГАНАХ УПРАВЛЕНИЯ
Слайд 34Продолжение
Продолжение
Слайд 35Окончание
Окончание
Слайд 365. ОПРЕДЕЛЕНИЕ ЗОН РАСПОЛОЖЕНИЯ ОРГАНОВ УПРАВЛЕНИЯ
5. ОПРЕДЕЛЕНИЕ ЗОН РАСПОЛОЖЕНИЯ ОРГАНОВ УПРАВЛЕНИЯ
Слайд 37Продолжение
Продолжение
Слайд 38Определение координаты контрольной точки сиденья (КТС)
(старая редакция ГОСТ)
а) установите на центр подушки
Определение координаты контрольной точки сиденья (КТС)
(старая редакция ГОСТ)
а) установите на центр подушки
Слайд 39г) в вертикальной плоскости, проходящей через оси X´ и Z´. С помощью
г) в вертикальной плоскости, проходящей через оси X´ и Z´. С помощью
Слайд 40д) от полученной горизонтальной прямой отложите в масштабе на чертеже 97 мм
д) от полученной горизонтальной прямой отложите в масштабе на чертеже 97 мм
Слайд 41Определение координаты контрольной точки сиденья (КТС)
(новая редакция по ГОСТ Р 5353-2012)
Определение координаты контрольной точки сиденья (КТС)
(новая редакция по ГОСТ Р 5353-2012)

Слайд 42Сиденье с устройством SIP
Сиденье с устройством SIP

Слайд 43Определение контрольной точки сиденья (SIP)
SIP следует определять с помощью устройства, представленного выше
нижеследующих
Определение контрольной точки сиденья (SIP)
SIP следует определять с помощью устройства, представленного выше
нижеследующих
Слайд 44Размещение устройства
Помещают устройство без дополнительных масс сбоку от центральной плоскости на подушку
Размещение устройства
Помещают устройство без дополнительных масс сбоку от центральной плоскости на подушку
Слайд 45Устанавливают дополнительные массы, доведя общую массу устройства от 26 ± 1 до
Устанавливают дополнительные массы, доведя общую массу устройства от 26 ± 1 до
Слайд 46Измерение
Проводят измерения на каждой стороне устройства в точках на равном расстоянии от
Измерение
Проводят измерения на каждой стороне устройства в точках на равном расстоянии от
Слайд 47
6. Оценка расположение органов управления в кабине машины
с помощью коэффициента удобства
6. Оценка расположение органов управления в кабине машины
с помощью коэффициента удобства
Слайд 48где Nок- количество основных рычагов и педалей, попавших в зону комфорта;
Nвд- количество
где Nок- количество основных рычагов и педалей, попавших в зону комфорта;
Nвд- количество
Слайд 49
ЗОНЫ КОМФОРТА И ДОСЯГАЕМОСТИ
ЗОНЫ КОМФОРТА И ДОСЯГАЕМОСТИ
Слайд 50ОРГАНЫ УПРАВЛЕНИЯ МАШИНОЙ
ОРГАНЫ УПРАВЛЕНИЯ МАШИНОЙ

Слайд 51..
Зоны комфорта и досягаемости (вид сбоку):
1 – зона комфорта; 2 – зона
Зоны комфорта и досягаемости (вид сбоку):
1 – зона комфорта; 2 – зона
Слайд 52
Зоны комфорта и досягаемости (вид сверху)
1 – контрольная точка сидения (SIP); 2
Зоны комфорта и досягаемости (вид сверху)
1 – контрольная точка сидения (SIP); 2
Слайд 53
Зоны комфорта и досягаемости (вид спереди)
1 – контрольная точка сидения (SIP); 2
Зоны комфорта и досягаемости (вид спереди)
1 – контрольная точка сидения (SIP); 2
Слайд 547. Формулирование заключения о прохождении машиной сертификации с точки зрения требований эргономических
Слайд 55Стандартные условия определения расположения органов управления
[ ГОСТ 27258-87 (ИСО 6682-86)]
1. Зоны
Стандартные условия определения расположения органов управления
[ ГОСТ 27258-87 (ИСО 6682-86)]
1. Зоны
![Стандартные условия определения расположения органов управления [ ГОСТ 27258-87 (ИСО 6682-86)] 1.](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1121045/slide-54.jpg)
Слайд 561.2. Для операторов высокого и низкого роста сиденье устанавливают в номинальное положение
1.2. Для операторов высокого и низкого роста сиденье устанавливают в номинальное положение
Слайд 571.3. Продольная регулировка сиденья – 150 мм. Для оператора низкого роста сиденья
1.3. Продольная регулировка сиденья – 150 мм. Для оператора низкого роста сиденья
Слайд 581.4. Зоны расположения органов управления на машинах, имеющих продольную регулировку сиденья от
1.4. Зоны расположения органов управления на машинах, имеющих продольную регулировку сиденья от
Слайд 59ТРЕБОВАНИЯ К ОФОРМЛЕНИЮ ОТЧЕТА
1. Отчет выполняется на листах формата А4, с оформлением
1. Отчет выполняется на листах формата А4, с оформлением
Слайд 604. Расчет коэффициентов Кну и Кком производится по формулам с обязательной подстановкой
Слайд 61Варианты заданий
Варианты заданий
 Общий вид стационарной ЭТЛ
Общий вид стационарной ЭТЛ Физика для химиков. День второй. Все еще термодинамика
Физика для химиков. День второй. Все еще термодинамика Термодинамические циклы энергоустановок
Термодинамические циклы энергоустановок Проводники и диэлектрики в электростатическом поле
Проводники и диэлектрики в электростатическом поле Строение жидкостей, аморфных тел и жидких кристаллов. Лекция 6
Строение жидкостей, аморфных тел и жидких кристаллов. Лекция 6 Оптика. Физический диктант
Оптика. Физический диктант Первый закон термодинамики
Первый закон термодинамики Солнечный котел
Солнечный котел Технология рентгеновских трубок. (Лекция 6)
Технология рентгеновских трубок. (Лекция 6) Изобретение GPU компанией Nvidia
Изобретение GPU компанией Nvidia Реализация проекта строительства атомной электростанции в Республике Беларусь
Реализация проекта строительства атомной электростанции в Республике Беларусь Силы в природе
Силы в природе Презентация на тему Конвекция (8 класс)
Презентация на тему Конвекция (8 класс)  Испарение и конденсация. Поглощение и выделение энергии
Испарение и конденсация. Поглощение и выделение энергии Индукция магнитного поля (9 класс)
Индукция магнитного поля (9 класс) Реечный замок. Устройство и принцип работы реечных замков различных типов
Реечный замок. Устройство и принцип работы реечных замков различных типов Лазер. Лазерное излучение
Лазер. Лазерное излучение Оптические приборы
Оптические приборы Плотность вещества
Плотность вещества Классификация электротехнических материалов
Классификация электротехнических материалов Ножницы как рычаг
Ножницы как рычаг Импульс Закон
Импульс Закон Исследование изображений, даваемых линзой
Исследование изображений, даваемых линзой Давление. Единицы давления
Давление. Единицы давления Вес. Невесомость. Перегрузки
Вес. Невесомость. Перегрузки Машины и механизмы
Машины и механизмы Введение. Кинематика поступательного и вращательного движения вопросы
Введение. Кинематика поступательного и вращательного движения вопросы Силовая схема и аппараты электропоездов ЭД4М и ЭП2Д
Силовая схема и аппараты электропоездов ЭД4М и ЭП2Д