- Определение скоростей точек тела при плоскопараллельном движении

Содержание
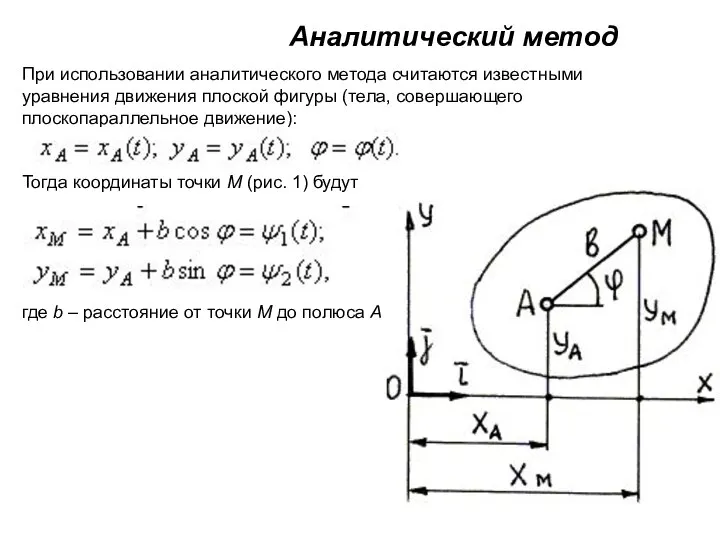
- 2. Аналитический метод При использовании аналитического метода считаются известными уравнения движения плоской фигуры (тела, совершающего плоскопараллельное движение):
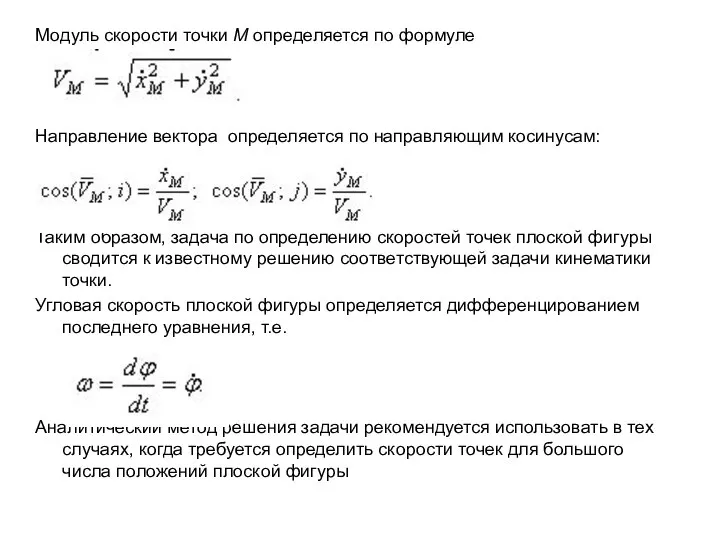
- 3. Модуль скорости точки М определяется по формуле Направление вектора определяется по направляющим косинусам: Таким образом, задача
- 4. Определение скоростей точек звеньев плоских механизмов Последовательность решения задач по определению скоростей для плоских механизмов. 1.
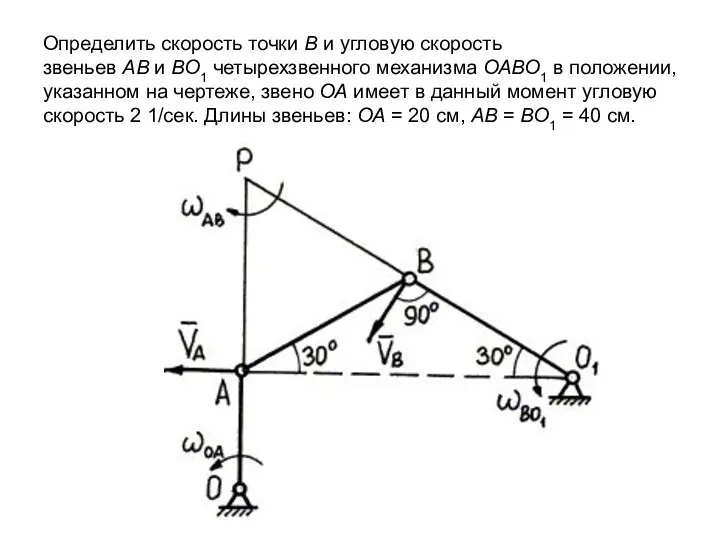
- 5. Определить скорость точки В и угловую скорость звеньев АВ и ВО1 четырехзвенного механизма ОАВО1 в положении,
- 7. Скачать презентацию
Слайд 2Аналитический метод
При использовании аналитического метода считаются известными уравнения движения плоской фигуры (тела,
Аналитический метод
При использовании аналитического метода считаются известными уравнения движения плоской фигуры (тела,
Слайд 3Модуль скорости точки М определяется по формуле
Направление вектора определяется по направляющим косинусам:
Таким образом, задача по
Модуль скорости точки М определяется по формуле
Направление вектора определяется по направляющим косинусам:
Таким образом, задача по
Слайд 4Определение скоростей точек звеньев плоских механизмов
Последовательность решения задач по определению скоростей для
Определение скоростей точек звеньев плоских механизмов
Последовательность решения задач по определению скоростей для
Слайд 5Определить скорость точки В и угловую скорость звеньев АВ и ВО1 четырехзвенного механизма ОАВО1 в положении, указанном на чертеже, звено ОА имеет
Определить скорость точки В и угловую скорость звеньев АВ и ВО1 четырехзвенного механизма ОАВО1 в положении, указанном на чертеже, звено ОА имеет
 Резистор с сопротивлением
Резистор с сопротивлением Электрическая цепь и её составные части
Электрическая цепь и её составные части Простые механизмы. Рычаг
Простые механизмы. Рычаг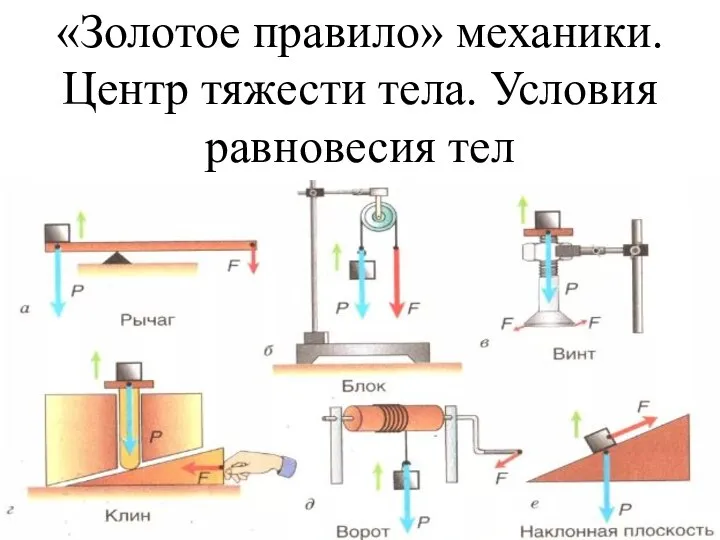 Золотое правило механики. Центр тяжести тела. Условия равновесия тел
Золотое правило механики. Центр тяжести тела. Условия равновесия тел Источники света
Источники света Механические колебания и волны. Звук
Механические колебания и волны. Звук Явление инерция. Инерция покоя. Инерция движения
Явление инерция. Инерция покоя. Инерция движения Презентация на тему Вычисление массы и объема тела 7 класс
Презентация на тему Вычисление массы и объема тела 7 класс  Отражение света
Отражение света Применение аккумуляторов
Применение аккумуляторов Микромир – мир атомов и элементарных частиц
Микромир – мир атомов и элементарных частиц Презентация на тему Конспект и презентация к уроку повторения
Презентация на тему Конспект и презентация к уроку повторения  Энергия связи ядра. Ядерные реакции
Энергия связи ядра. Ядерные реакции Все о нагрузках. Практическое занятие
Все о нагрузках. Практическое занятие Примесные полупроводники
Примесные полупроводники Lek_01_Elek_22
Lek_01_Elek_22 Тепловые электрические станции
Тепловые электрические станции Отчёт по педагогической практике. Страны и континенты. Разные страны. Промыслы, культура
Отчёт по педагогической практике. Страны и континенты. Разные страны. Промыслы, культура Механическая работа. Единицы работы
Механическая работа. Единицы работы Солнечная энергия
Солнечная энергия Динамика материальной точки. Движение системы материальных точек. Движение тел переменной массы
Динамика материальной точки. Движение системы материальных точек. Движение тел переменной массы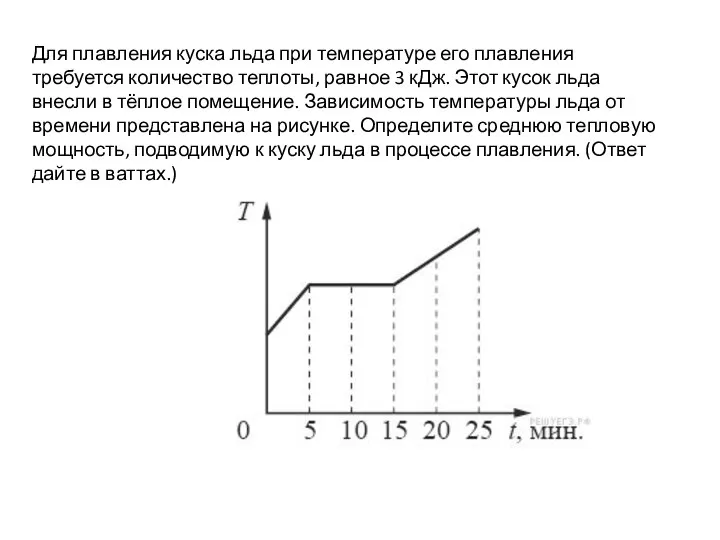 Определение тепловой мощности. ВПР, 9 класс
Определение тепловой мощности. ВПР, 9 класс Диэлектрическая проницаемость
Диэлектрическая проницаемость Формирование навыков смыслового чтения и работы с текстом на уроках физики (часть 1)
Формирование навыков смыслового чтения и работы с текстом на уроках физики (часть 1) Демонтаж трансмиссии автомобилей
Демонтаж трансмиссии автомобилей Мониторинг предпрофильной группы 9 классов для составления индивидуальных траекторий учащихся
Мониторинг предпрофильной группы 9 классов для составления индивидуальных траекторий учащихся Презентация на тему Применение закона рычага к блоку
Презентация на тему Применение закона рычага к блоку  Основные положения МКТ
Основные положения МКТ