- Презентация без названия (1)

Содержание
- 2. 1. Момент силы. Момент силы относительно оси - величина, характеризующая вращательное действие силы и равная векторному
- 4. Момент инерции. Момент инерции тела- мера его инертности во вращательном движении, равен сумме моментов инерции всех
- 5. Момент инерции твердого тела относительно произвольной оси. Теорема Штейнера Момент инерции тела относительно произвольной оси равен
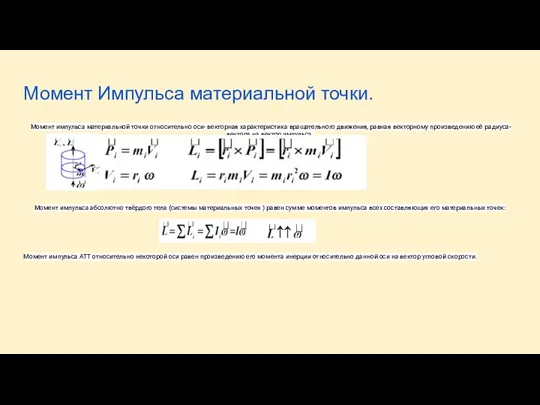
- 6. Момент Импульса материальной точки. Момент импульса материальной точки относительно оси- векторная характеристика вращательного движения, равная векторному
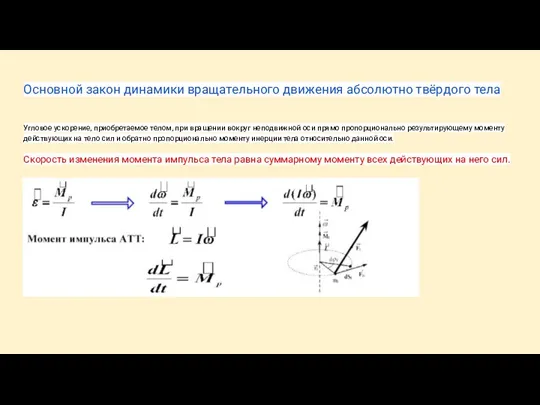
- 7. Основной закон динамики вращательного движения абсолютно твёрдого тела Угловое ускорение, приобретаемое телом, при вращении вокруг неподвижной
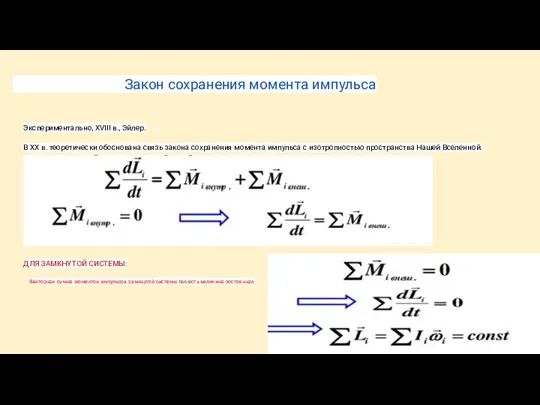
- 8. Закон сохранения момента импульса Экспериментально, XVIII в., Эйлер. В ХХ в. теоретически обоснована связь закона сохранения
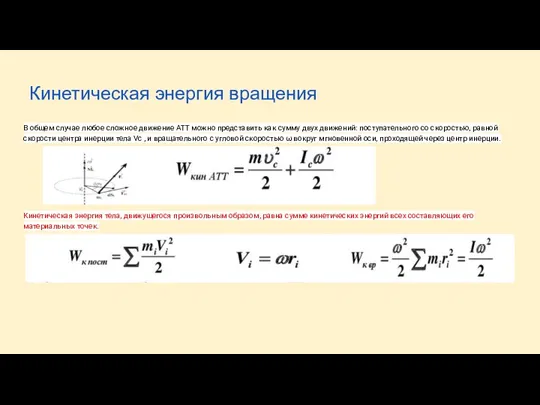
- 9. Кинетическая энергия вращения В общем случае любое сложное движение АТТ можно представить как сумму двух движений:
- 10. Элементарная работа i-той силы при вращении тела: Элементарная работа равнодействующей при вращении тела: Работа равнодействующей всех
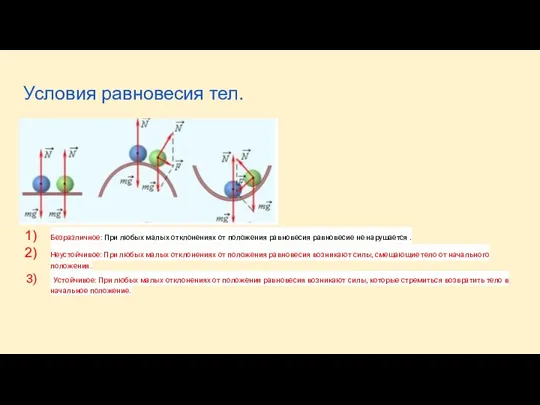
- 11. Условия равновесия тел. Безразличное: При любых малых отклонениях от положения равновесия равновесие не нарушается . Неустойчивое:
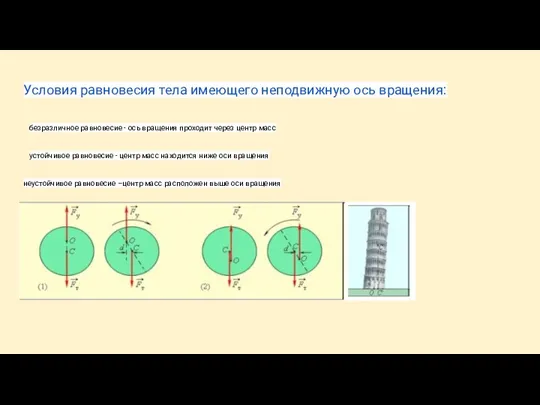
- 12. Условия равновесия тела имеющего неподвижную ось вращения: безразличное равновесие - ось вращения проходит через центр масс
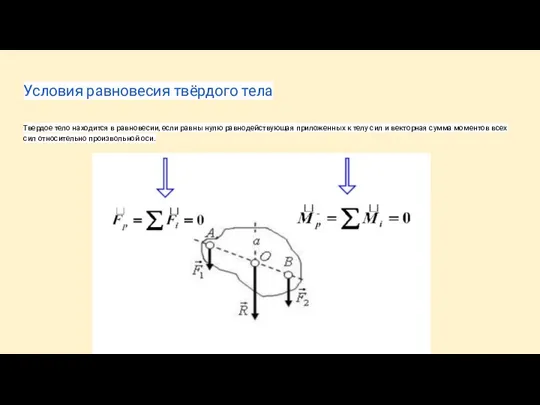
- 13. Условия равновесия твёрдого тела Твердое тело находится в равновесии, если равны нулю равнодействующая приложенных к телу
- 15. Скачать презентацию
Слайд 2 1. Момент силы.
Момент силы относительно оси - величина, характеризующая вращательное действие
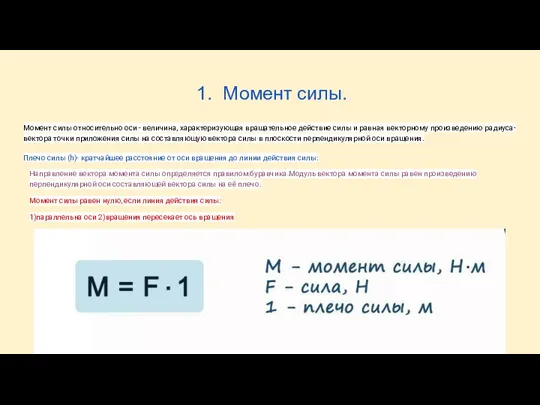
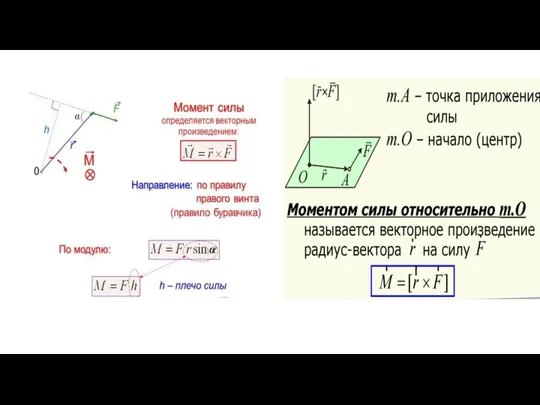
1. Момент силы.
Момент силы относительно оси - величина, характеризующая вращательное действие
Слайд 4 Момент инерции.
Момент инерции тела- мера его инертности во вращательном движении, равен
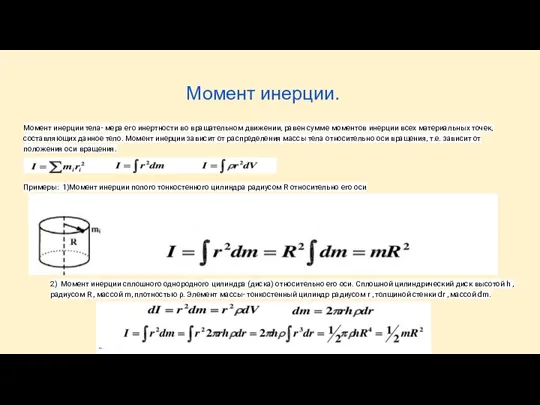
Момент инерции.
Момент инерции тела- мера его инертности во вращательном движении, равен
Слайд 5Момент инерции твердого тела относительно произвольной оси. Теорема Штейнера
Момент инерции тела относительно
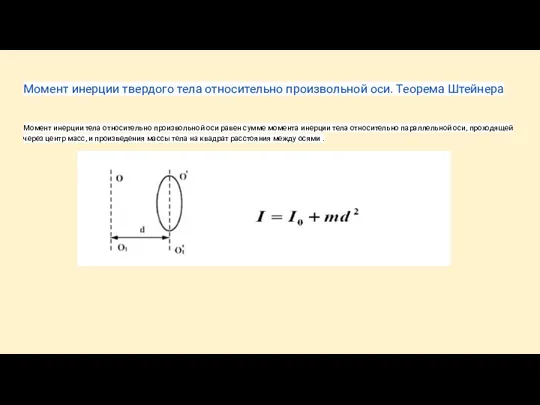
Момент инерции твердого тела относительно произвольной оси. Теорема Штейнера
Момент инерции тела относительно
Слайд 6Момент Импульса материальной точки.
Момент импульса материальной точки относительно оси- векторная характеристика вращательного
Момент Импульса материальной точки.
Момент импульса материальной точки относительно оси- векторная характеристика вращательного
Слайд 7Основной закон динамики вращательного движения абсолютно твёрдого тела
Угловое ускорение, приобретаемое телом, при
Основной закон динамики вращательного движения абсолютно твёрдого тела
Угловое ускорение, приобретаемое телом, при
Слайд 8 Закон сохранения момента импульса
Экспериментально, XVIII в., Эйлер.
В ХХ в. теоретически обоснована
Закон сохранения момента импульса
Экспериментально, XVIII в., Эйлер.
В ХХ в. теоретически обоснована
Слайд 9Кинетическая энергия вращения
В общем случае любое сложное движение АТТ можно представить как
Кинетическая энергия вращения
В общем случае любое сложное движение АТТ можно представить как
Слайд 10 Элементарная работа i-той силы при вращении тела:
Элементарная работа равнодействующей при
Элементарная работа i-той силы при вращении тела:
Элементарная работа равнодействующей при

Слайд 11Условия равновесия тел.
Безразличное: При любых малых отклонениях от положения равновесия равновесие не
Условия равновесия тел.
Безразличное: При любых малых отклонениях от положения равновесия равновесие не
Слайд 12Условия равновесия тела имеющего неподвижную ось вращения:
безразличное равновесие - ось вращения проходит
Условия равновесия тела имеющего неподвижную ось вращения:
безразличное равновесие - ось вращения проходит
Слайд 13Условия равновесия твёрдого тела
Твердое тело находится в равновесии, если равны нулю равнодействующая
Условия равновесия твёрдого тела
Твердое тело находится в равновесии, если равны нулю равнодействующая
 Призматический фасонный резец
Призматический фасонный резец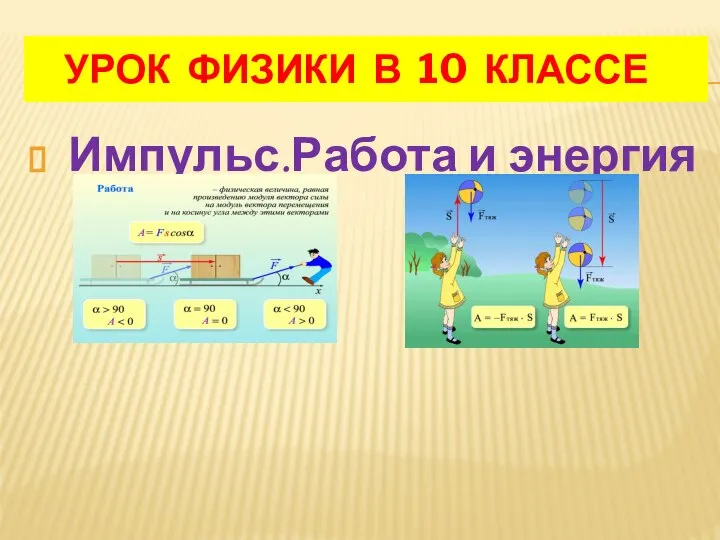 Импульс. Работа и энергия
Импульс. Работа и энергия Задача о железнодорожных составах
Задача о железнодорожных составах Импульс. Закон сохранения импульса
Импульс. Закон сохранения импульса Энергия. Законы сохранения в механике
Энергия. Законы сохранения в механике Агрегатное состояние вещества
Агрегатное состояние вещества Метрология. Выборочный контроль
Метрология. Выборочный контроль Конденсация и испарение в природе
Конденсация и испарение в природе Наглядные примеры проведения демонстрационных экспериментов на уроках физики с использованием школьного осциллографа
Наглядные примеры проведения демонстрационных экспериментов на уроках физики с использованием школьного осциллографа Устойчивость режима работы реактора. Лекция № 5
Устойчивость режима работы реактора. Лекция № 5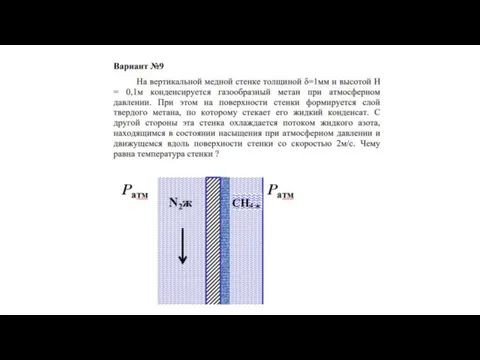 Задача по физике. Вариант №9 (решение)
Задача по физике. Вариант №9 (решение) Динамика в задачах
Динамика в задачах Частицы с отрицательной энергией в эргосфере чёрных дыр
Частицы с отрицательной энергией в эргосфере чёрных дыр Что такое наномир? Лекция по курсу Нанохимия
Что такое наномир? Лекция по курсу Нанохимия Магнитное поле
Магнитное поле Интегрированный урок по теме: Копченые продукты со вкусом физики и запахом истории
Интегрированный урок по теме: Копченые продукты со вкусом физики и запахом истории Кинематика плоскопараллельного движения абсолютно твердого тела и сложного движения точки
Кинематика плоскопараллельного движения абсолютно твердого тела и сложного движения точки Курс физики. Введение
Курс физики. Введение Сила трения
Сила трения Масса. Задачник
Масса. Задачник Жұптасқан желкен типті желтурбинаны құрастыру
Жұптасқан желкен типті желтурбинаны құрастыру Напряженность электрического поля в пространстве. Закрепление пройденного материала
Напряженность электрического поля в пространстве. Закрепление пройденного материала Основные вопросы, рассматриваемые в рамках занятий модуля № 23
Основные вопросы, рассматриваемые в рамках занятий модуля № 23 Скорость. Равномерное прямолинейное движение
Скорость. Равномерное прямолинейное движение Законы отражения и преломления света
Законы отражения и преломления света День космонавтики. Двигатели I ступени
День космонавтики. Двигатели I ступени Вынужденные колебания
Вынужденные колебания Динамика материальной точки (частицы)
Динамика материальной точки (частицы)