- Прикладная механика. Тема 1: Кинематика точки

Содержание
- 2. Литература: Ильин В.Н., Полянин В.Д. Прикладная механика. Часть I. Механика недеформируемого твердого тела. Учебное пособие. -
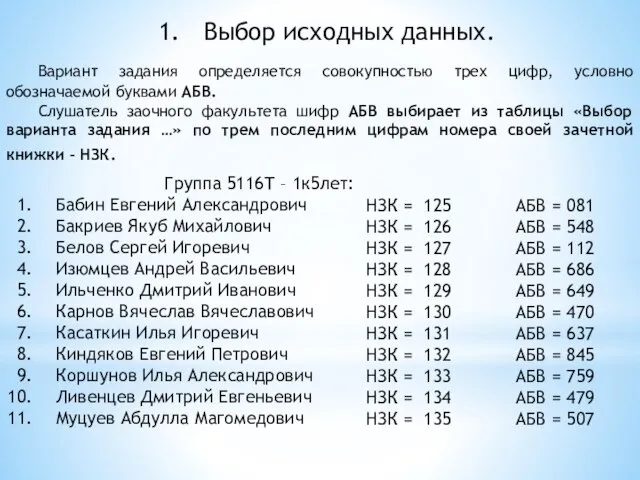
- 3. Выбор исходных данных. Вариант задания определяется совокупностью трех цифр, условно обозначаемой буквами АБВ. Слушатель заочного факультета
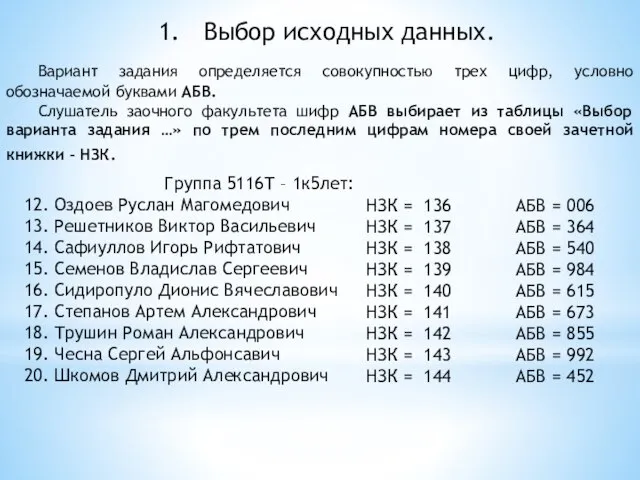
- 4. Выбор исходных данных. Вариант задания определяется совокупностью трех цифр, условно обозначаемой буквами АБВ. Слушатель заочного факультета
- 5. Пример оформления титульного листа контрольных работ
- 6. Разбор задания №1 «Кинематика точки»: Выбор исходных данных. Определение уравнения траектории и построение её на чертеже.
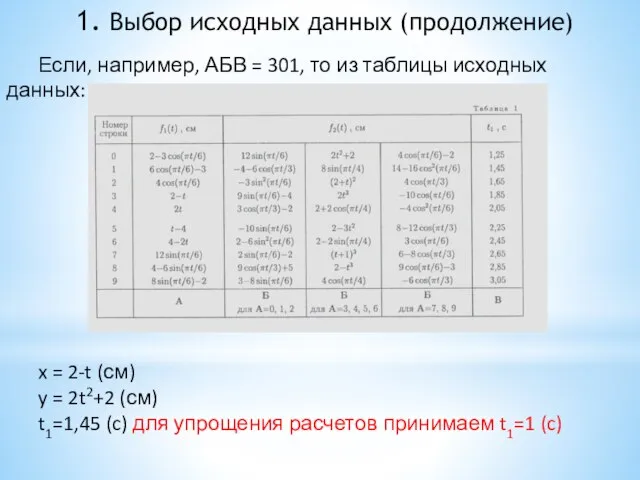
- 7. 1. Выбор исходных данных (продолжение) Если, например, АБВ = 301, то из таблицы исходных данных: x
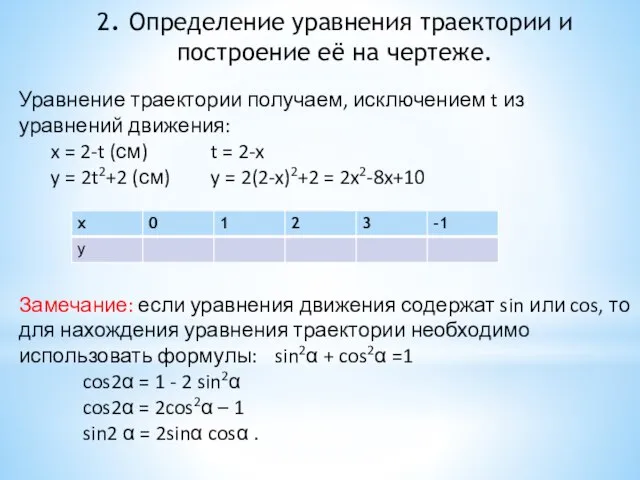
- 8. 2. Определение уравнения траектории и построение её на чертеже. Уравнение траектории получаем, исключением t из уравнений
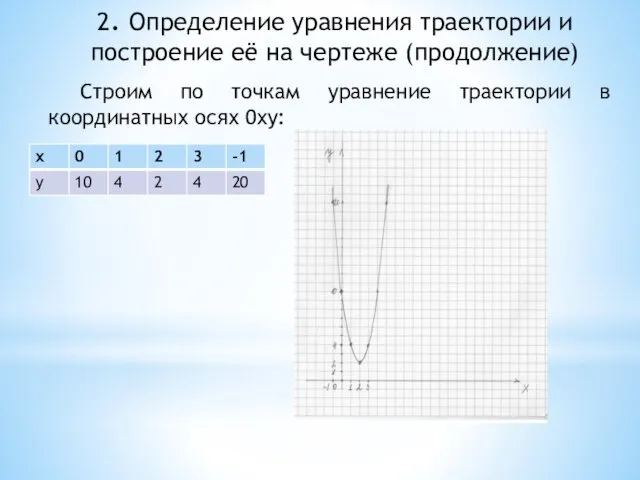
- 9. 2. Определение уравнения траектории и построение её на чертеже (продолжение) Строим по точкам уравнение траектории в
- 10. . 3.1. Определение положения точки на траектории. Подставляем значение момента времени t1=1 с(в общем случае берется
- 11. 3.2. Определение полного вектора скорости. Проекция вектора полной скорости на ось х – VX : =
- 12. На чертеже вектор полной скорости изображается по касательной к траектории, как векторная сумма проекций скорости на
- 13. 3.3. Определение векторов касательного, нормального и полного ускорений. Проекция вектора полного ускорения на ось х –
- 14. Определим значение вектора касательного ускорения – aτ : (см/c2) На чертеже вектор касательного ускорения изображается по
- 15. Определим значение вектора нормального ускорения – an : (см/c2) На чертеже вектор нормального ускорения изображается перпендикулярно
- 16. На чертеже полный вектор ускорения a образует векторный треугольник с векторами нормального an и касательного ускорения
- 17. 3.4. Определение радиуса кривизны траектории. Определим радиус кривизны траектории: (см) На чертеже радиус кривизны траектории ρ
- 18. Выводы: 1) Кинематикой называют раздел механики, в котором рассматривают движение тел и точек без учета сил,
- 19. Разбор задания №2 «Кинематика твердого тела»: 1.Выбор исходных данных. 2.Определение скорости и ускорения звена по заданному
- 20. 1. Выбор исходных данных (продолжение) Если, например, АБВ =738, то из таблицы исходных данных:
- 21. 2. Определение скорости и ускорения звена по заданному закону движения. Вариант 1: в Дано φ =
- 22. 3.1. Определение угловых скоростей и угловых ускорений колес 1,2 и 3. Определив кинематические характеристики заданного звена,
- 23. . 3.1. Определение угловых скоростей и угловых ускорений колес 1,2 и 3. Большой радиус колеса 2
- 24. 3.1. Определение угловых скоростей и угловых ускорений колес 1,2 и 3. На чертеже направления скоростей и
- 25. 3.2. Определение скоростей и ускорений точек A,B и C. Точка А лежит на малом радиусе 1
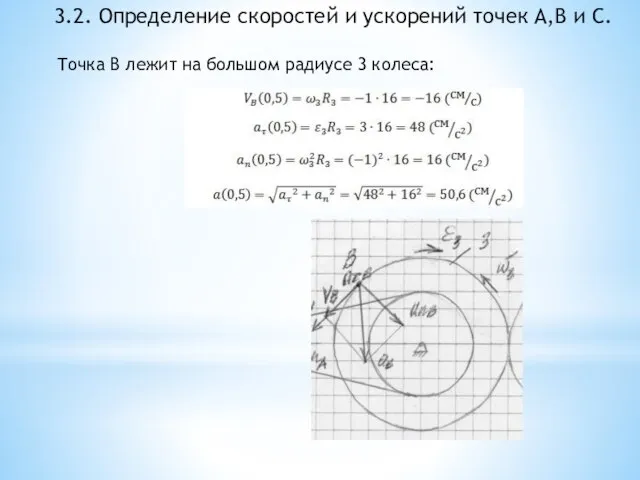
- 26. 3.2. Определение скоростей и ускорений точек A,B и C. Точка B лежит на большом радиусе 3
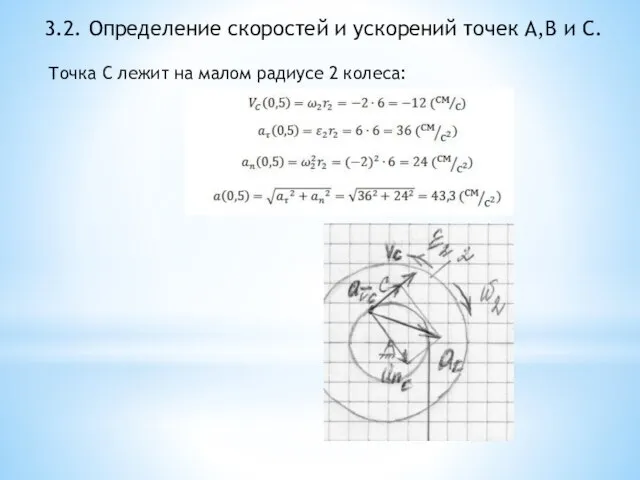
- 27. 3.2. Определение скоростей и ускорений точек A,B и C. Точка С лежит на малом радиусе 2
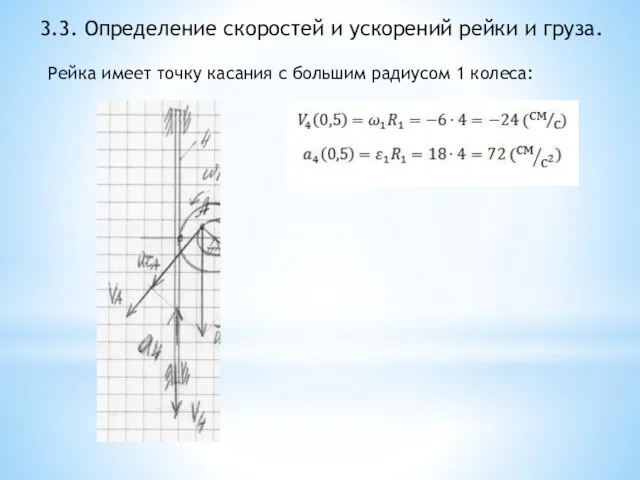
- 28. 3.3. Определение скоростей и ускорений рейки и груза. Рейка имеет точку касания с большим радиусом 1
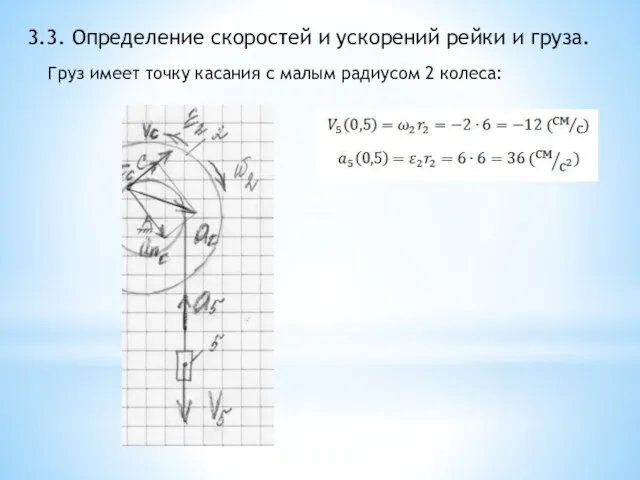
- 29. 3.3. Определение скоростей и ускорений рейки и груза. Груз имеет точку касания с малым радиусом 2
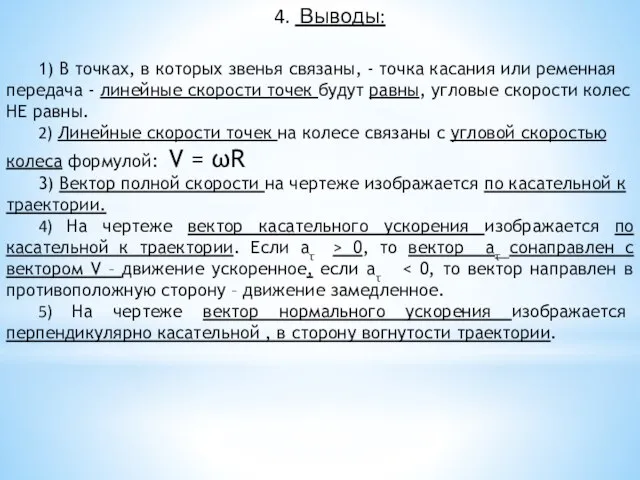
- 31. 4. Выводы: 1) В точках, в которых звенья связаны, - точка касания или ременная передача -
- 32. Разбор задания №3 «Кинематика твердого тела»: 1.Выбор исходных данных. 2. Перестроение схемы. 3.Определение скоростей всех точек
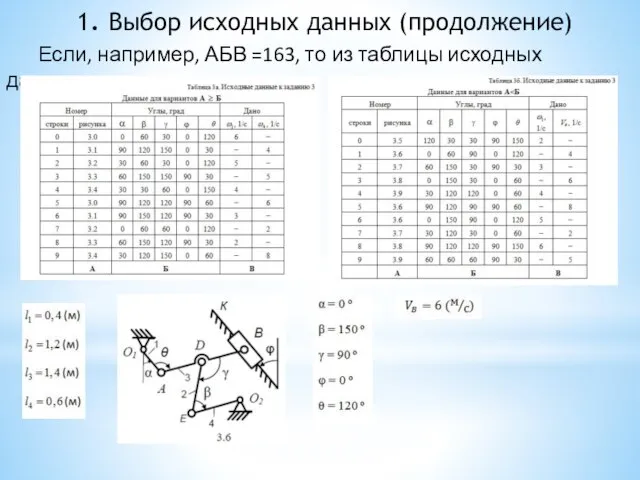
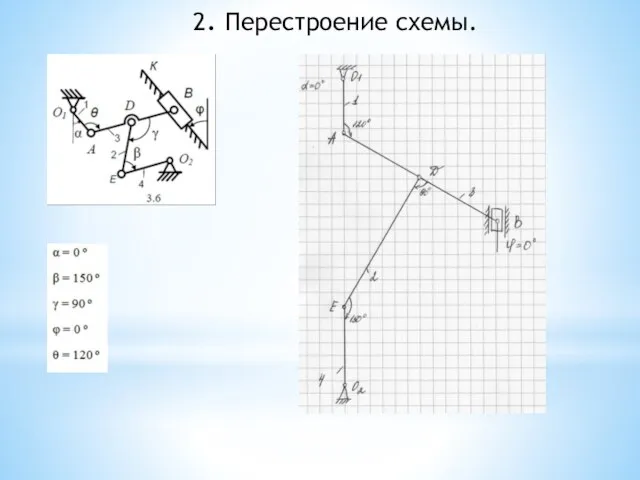
- 33. 1. Выбор исходных данных (продолжение) Если, например, АБВ =163, то из таблицы исходных данных:
- 34. 2. Перестроение схемы.
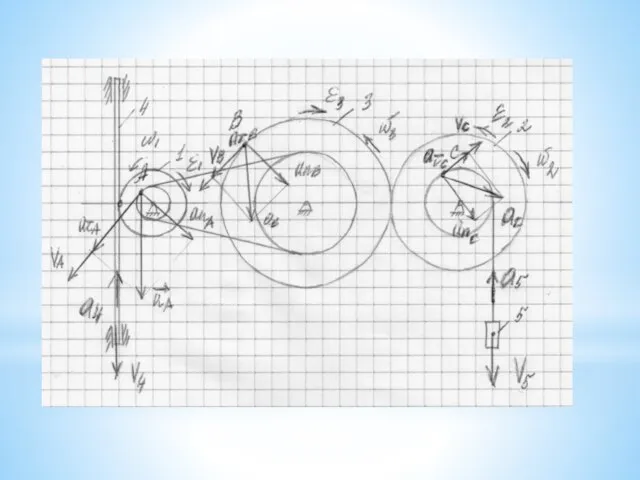
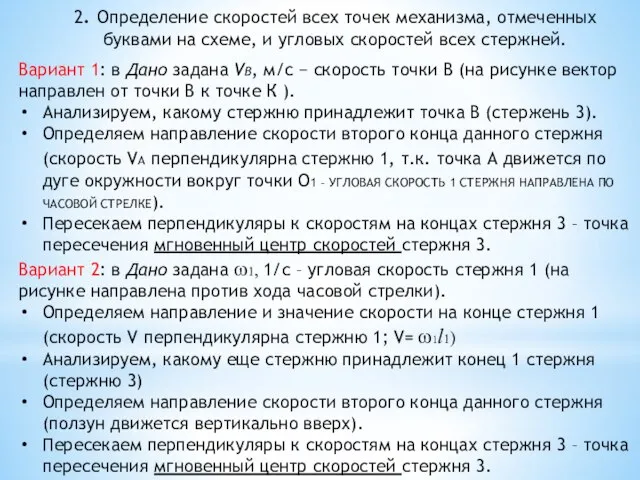
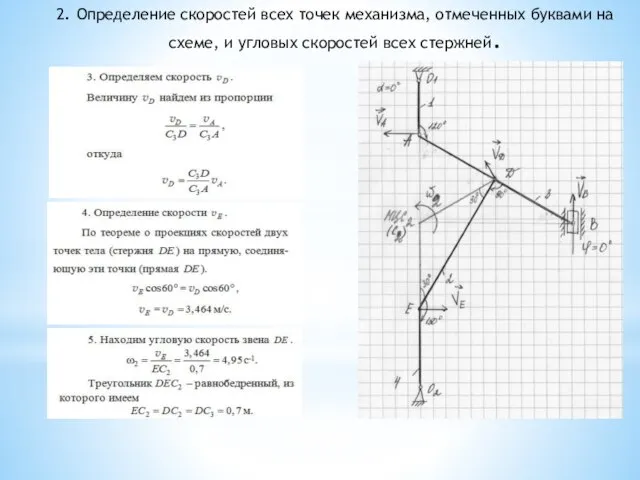
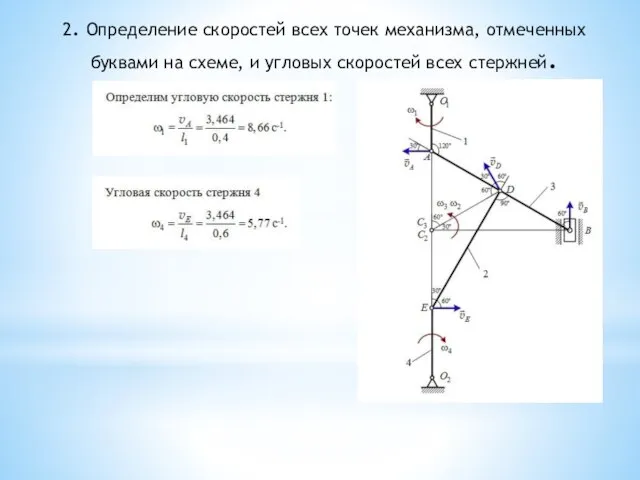
- 35. 2. Определение скоростей всех точек механизма, отмеченных буквами на схеме, и угловых скоростей всех стержней. Вариант
- 36. 2. Определение скоростей всех точек механизма, отмеченных буквами на схеме, и угловых скоростей всех стержней.
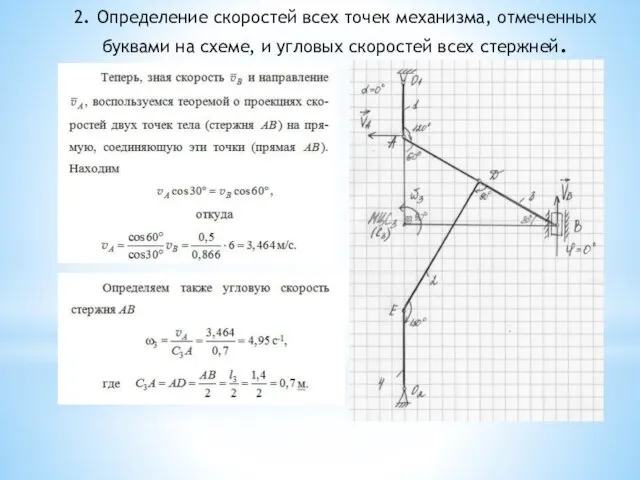
- 37. . 2. Определение скоростей всех точек механизма, отмеченных буквами на схеме, и угловых скоростей всех стержней.
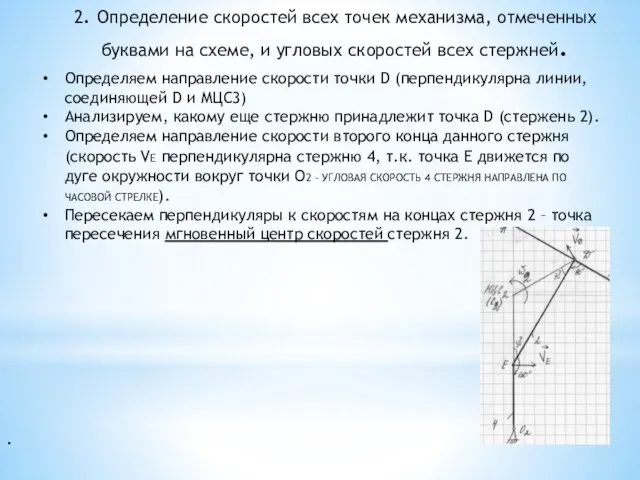
- 38. 2. Определение скоростей всех точек механизма, отмеченных буквами на схеме, и угловых скоростей всех стержней.
- 39. 2. Определение скоростей всех точек механизма, отмеченных буквами на схеме, и угловых скоростей всех стержней.
- 40. 4. Выводы: 1) Мгновенный центр скоростей – точка скорость, которой равна 0. 2) Мгновенный центр скоростей
- 41. Разбор задания №5 «Статика. Равновесие тела под действием плоской системы сил»: 1.Выбор исходных данных. 2.Нанесение внешних
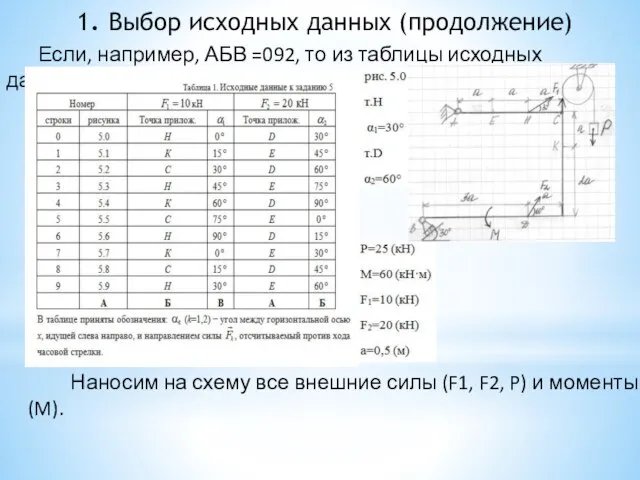
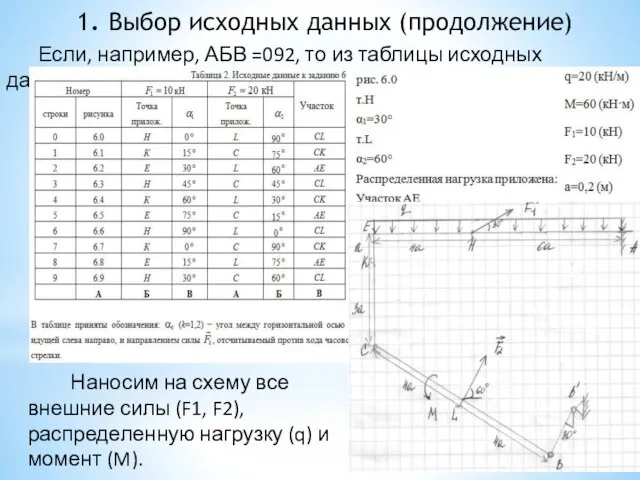
- 42. 1. Выбор исходных данных (продолжение) Если, например, АБВ =092, то из таблицы исходных данных: Наносим на
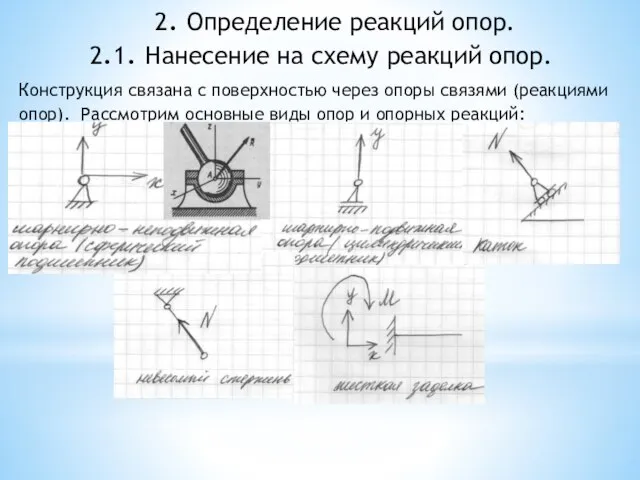
- 43. 2. Определение реакций опор. Конструкция связана с поверхностью через опоры связями (реакциями опор). Рассмотрим основные виды
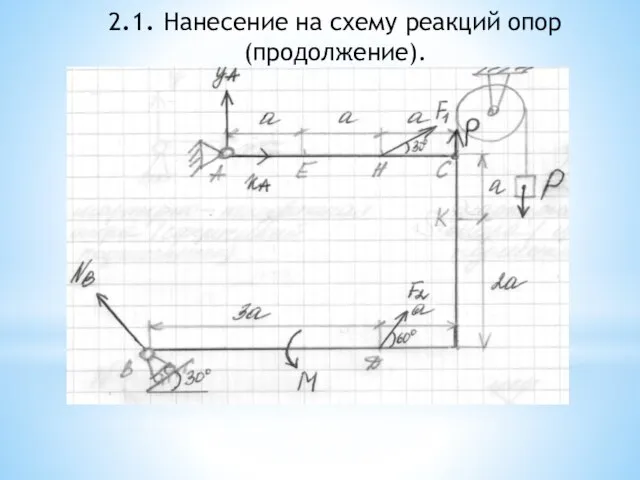
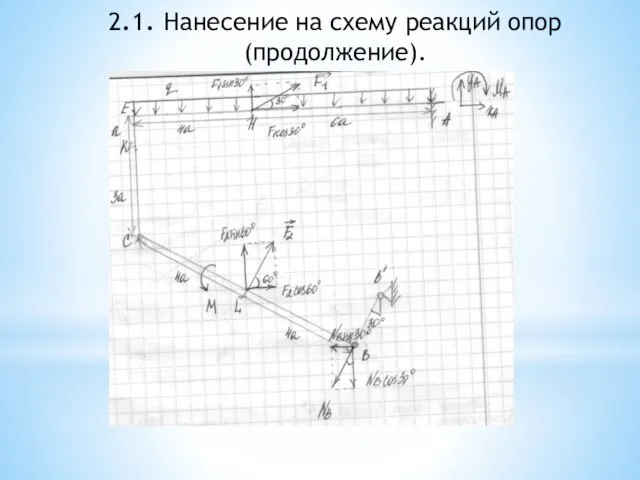
- 44. 2.1. Нанесение на схему реакций опор (продолжение).
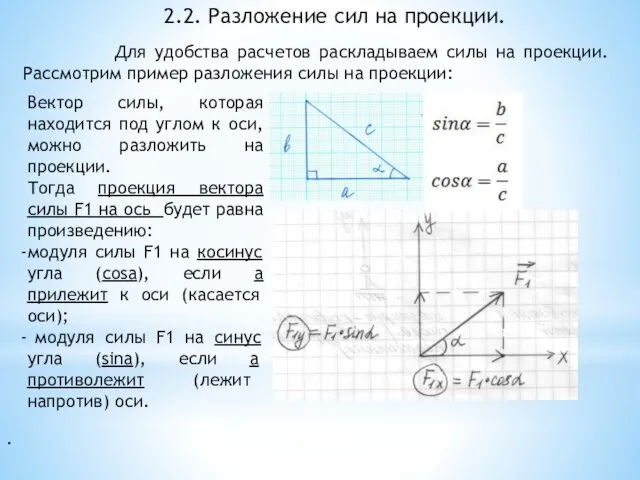
- 45. . 2.2. Разложение сил на проекции. Для удобства расчетов раскладываем силы на проекции. Рассмотрим пример разложения
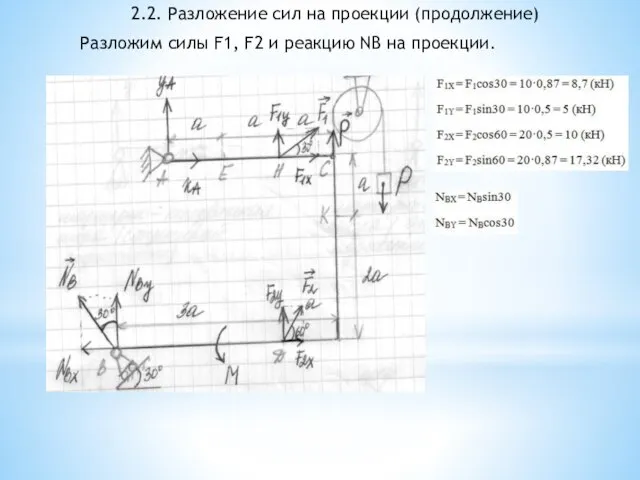
- 46. 2.2. Разложение сил на проекции (продолжение) Разложим силы F1, F2 и реакцию NB на проекции.
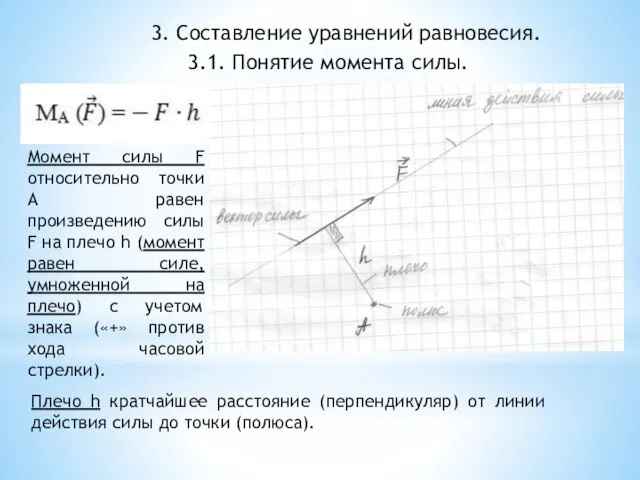
- 47. 3. Составление уравнений равновесия. 3.1. Понятие момента силы. Момент силы F относительно точки A равен произведению
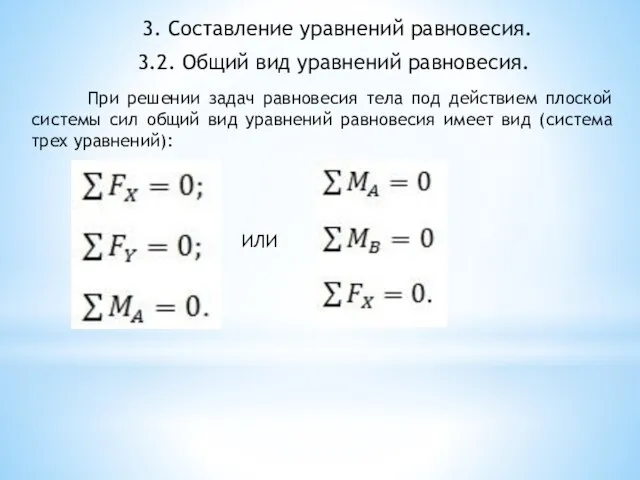
- 48. 3.2. Общий вид уравнений равновесия. При решении задач равновесия тела под действием плоской системы сил общий
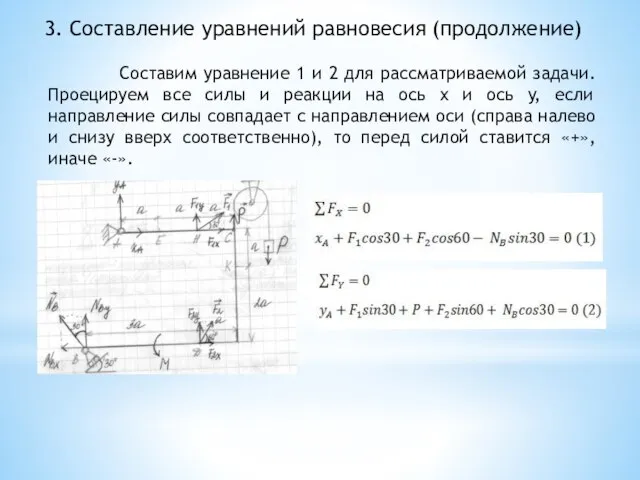
- 49. 3. Составление уравнений равновесия (продолжение) Составим уравнение 1 и 2 для рассматриваемой задачи. Проецируем все силы
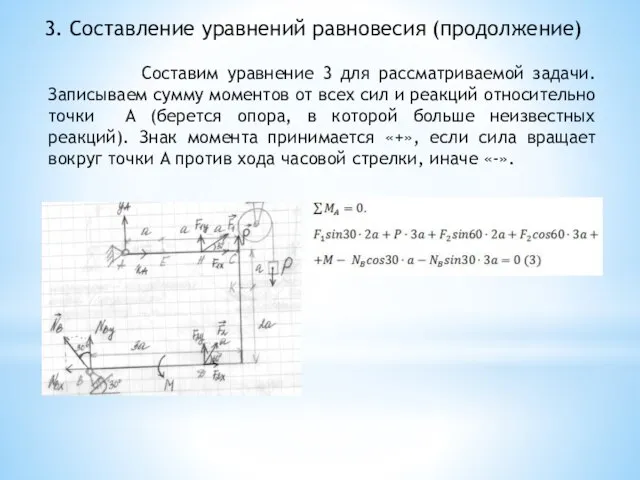
- 50. 3. Составление уравнений равновесия (продолжение) Составим уравнение 3 для рассматриваемой задачи. Записываем сумму моментов от всех
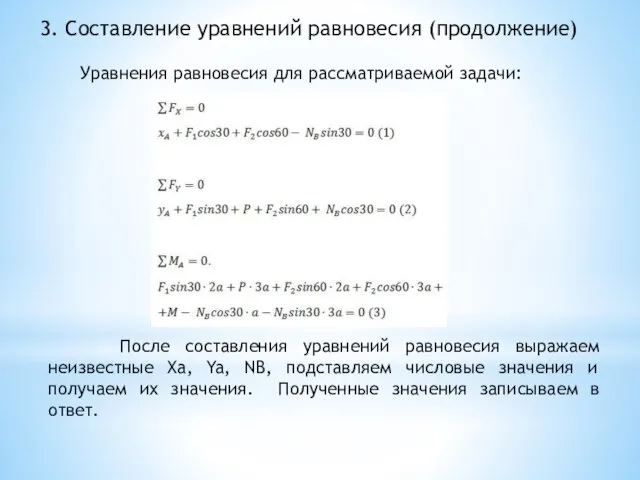
- 51. 3. Составление уравнений равновесия (продолжение) Уравнения равновесия для рассматриваемой задачи: После составления уравнений равновесия выражаем неизвестные
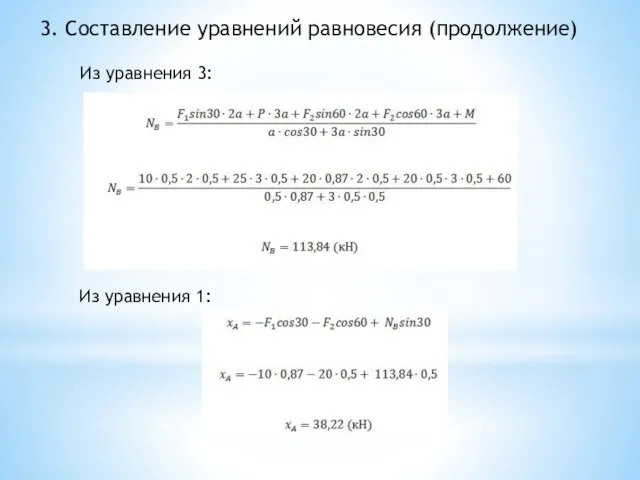
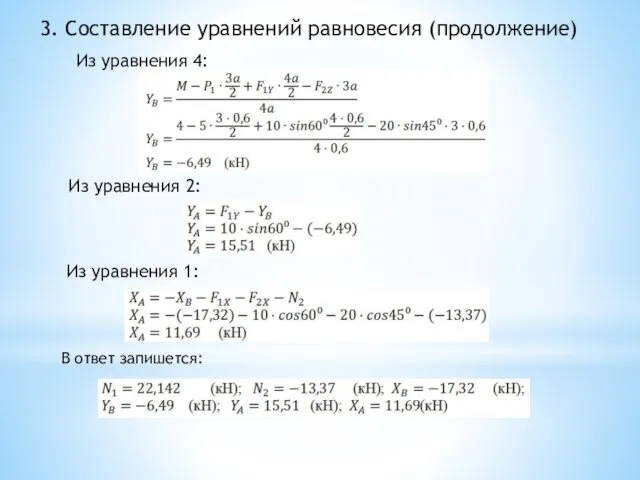
- 52. 3. Составление уравнений равновесия (продолжение) Из уравнения 3: Из уравнения 1:
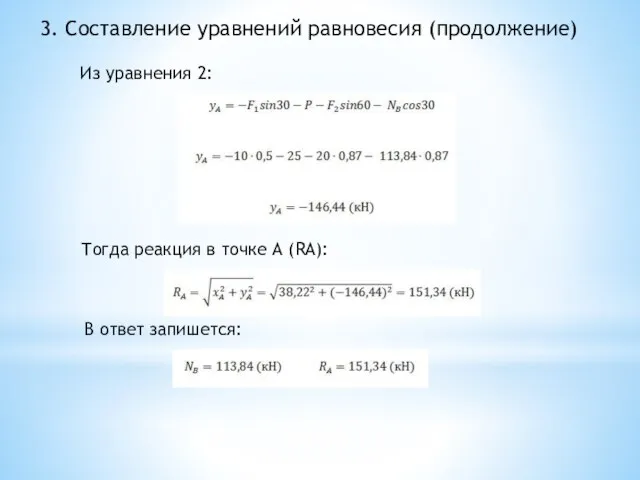
- 53. 3. Составление уравнений равновесия (продолжение) Из уравнения 2: Тогда реакция в точке А (RA): В ответ
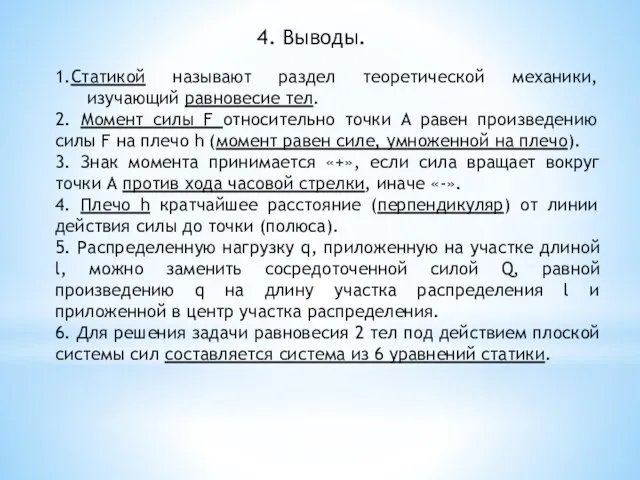
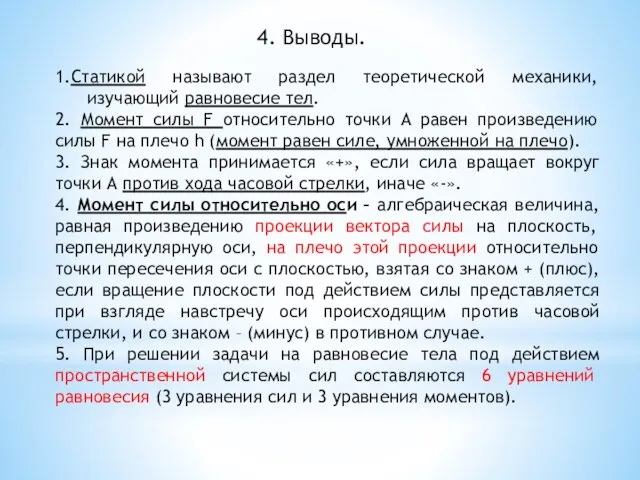
- 54. 4. Выводы. 1.Статикой называют раздел теоретической механики, изучающий равновесие тел. 2. Момент силы F относительно точки
- 55. Разбор задания №5 «Статика. Равновесие тела под действием плоской системы сил»: 1.Выбор исходных данных. Нанесение внешних
- 56. 1. Выбор исходных данных (продолжение) Если, например, АБВ =092, то из таблицы исходных данных: Наносим на
- 57. 2.1. Нанесение на схему реакций опор (продолжение).
- 58. 3.1. Общий вид уравнений равновесия для задач равновесия двух тел. При решении задач равновесия 2 тел
- 59. 3. Составление уравнений равновесия (продолжение)
- 60. 3. Составление уравнений равновесия (продолжение). Распределенная нагрузка q Прежде чем приступать к составлению уравнений равновесия рассмотрим
- 61. 3. Составление уравнений равновесия (продолжение) Составление уравнений равновесия в общем виде начинаем с того тела, на
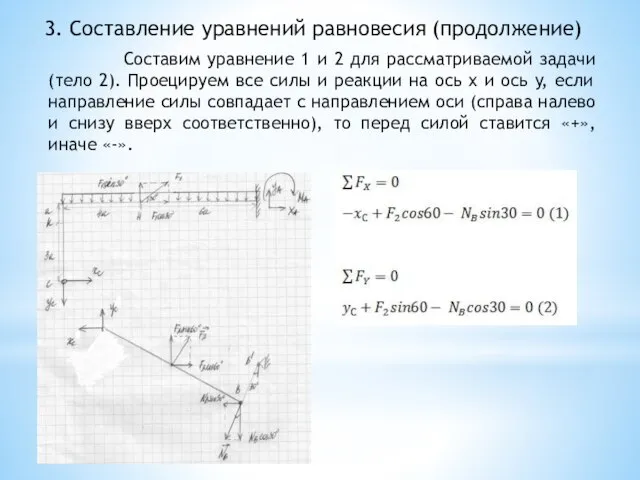
- 62. 3. Составление уравнений равновесия (продолжение) Составим уравнение 1 и 2 для рассматриваемой задачи (тело 2). Проецируем
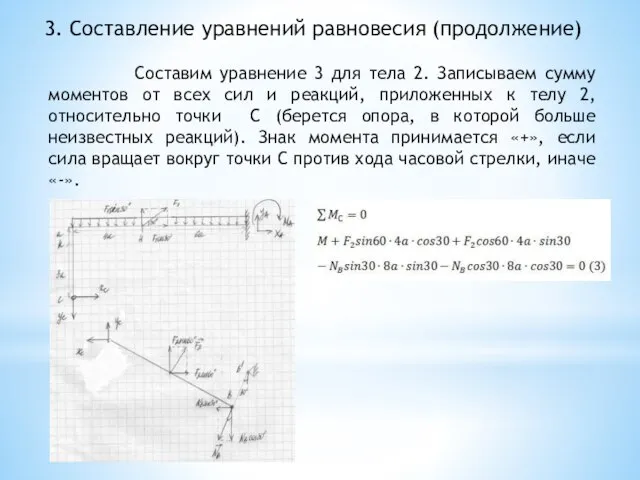
- 63. 3. Составление уравнений равновесия (продолжение) Составим уравнение 3 для тела 2. Записываем сумму моментов от всех
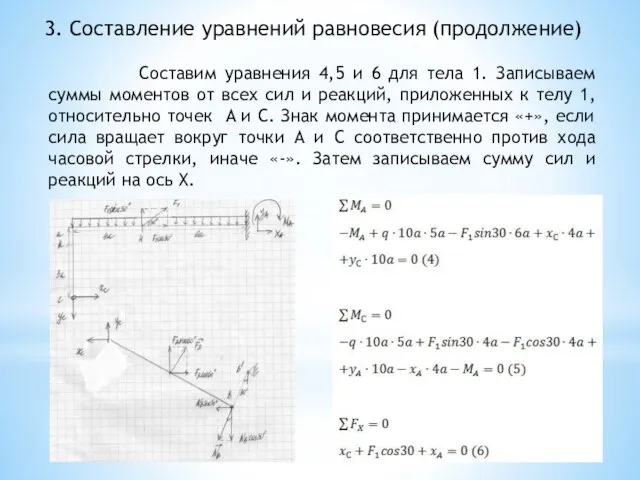
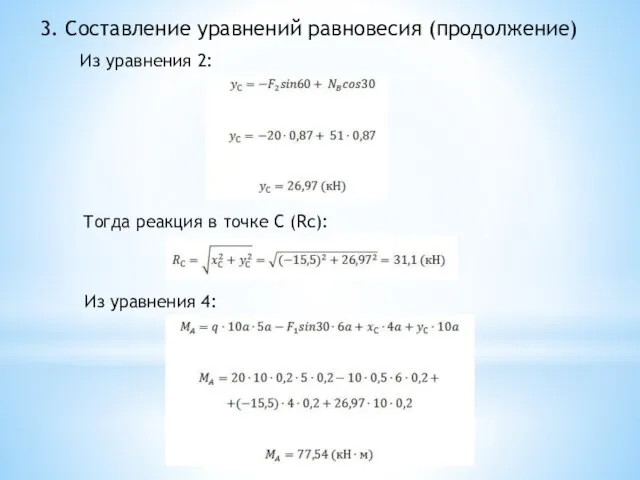
- 64. 3. Составление уравнений равновесия (продолжение) Составим уравнения 4,5 и 6 для тела 1. Записываем суммы моментов
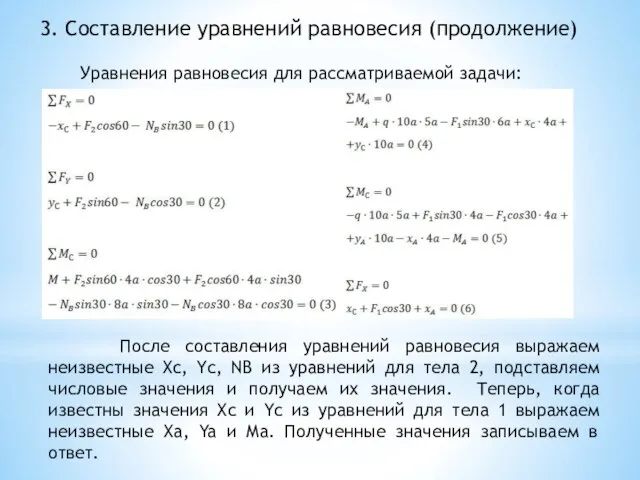
- 65. 3. Составление уравнений равновесия (продолжение) Уравнения равновесия для рассматриваемой задачи: После составления уравнений равновесия выражаем неизвестные
- 66. 3. Составление уравнений равновесия (продолжение) Из уравнения 3: Из уравнения 1:
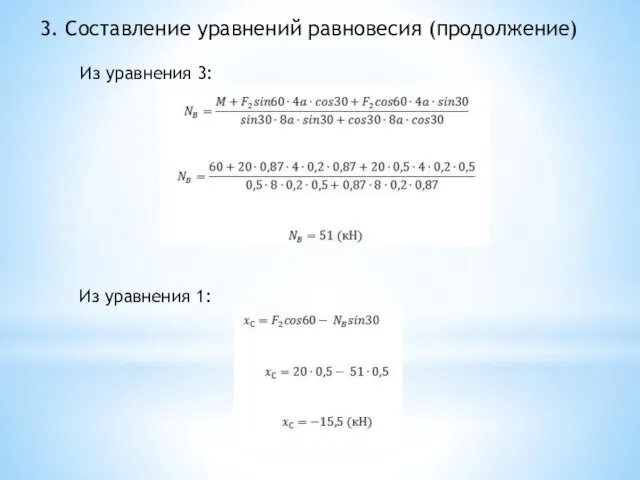
- 67. 3. Составление уравнений равновесия (продолжение) Из уравнения 2: Тогда реакция в точке С (Rс): Из уравнения
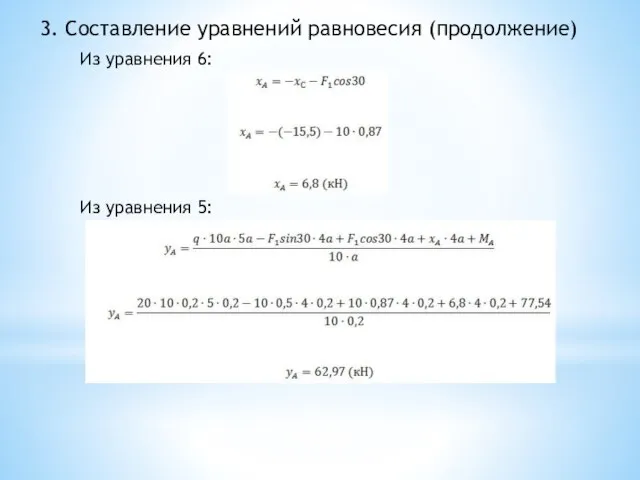
- 68. 3. Составление уравнений равновесия (продолжение) Из уравнения 6: Из уравнения 5:
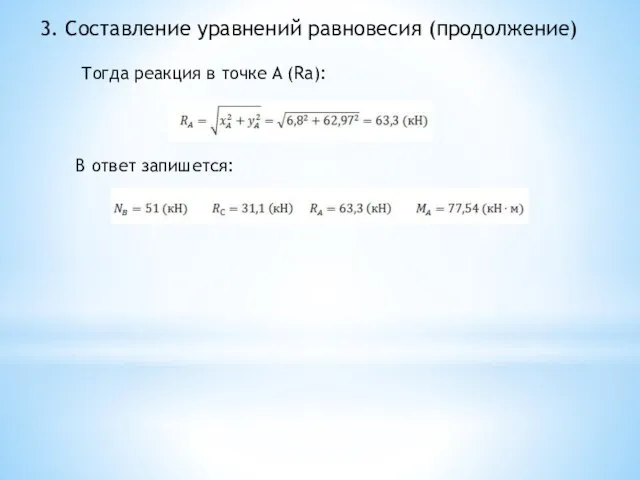
- 69. 3. Составление уравнений равновесия (продолжение) Тогда реакция в точке A (Ra): В ответ запишется:
- 70. 4. Выводы. 1.Статикой называют раздел теоретической механики, изучающий равновесие тел. 2. Момент силы F относительно точки
- 71. Разбор задания №7 «Статика. Равновесие тела под действием пространственной системы сил»: 1.Выбор исходных данных. Нанесение внешних
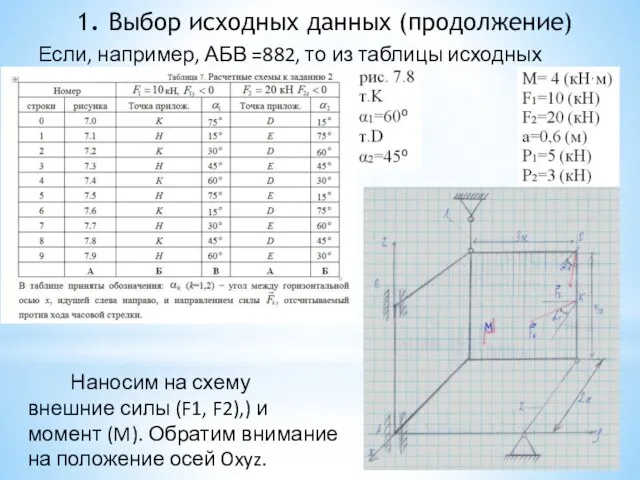
- 72. 1. Выбор исходных данных (продолжение) Если, например, АБВ =882, то из таблицы исходных данных: Наносим на
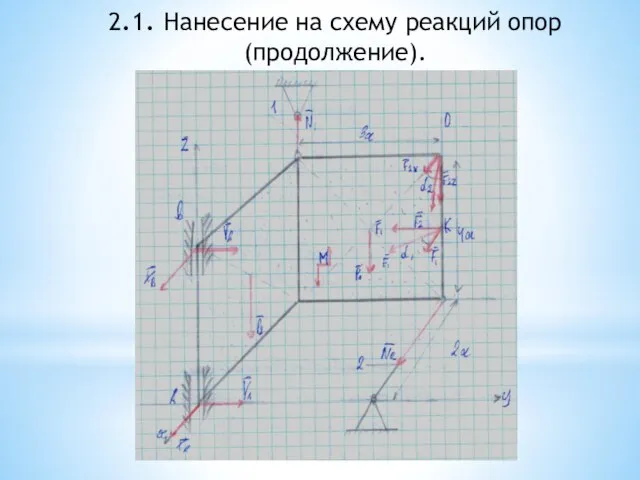
- 73. 2.1. Нанесение на схему реакций опор (продолжение).
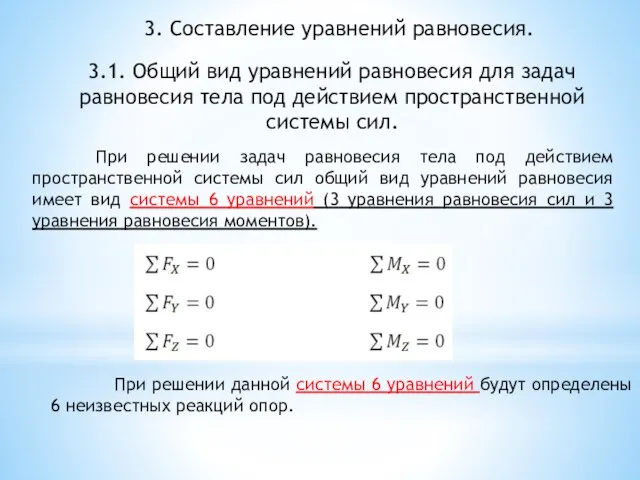
- 74. 3.1. Общий вид уравнений равновесия для задач равновесия тела под действием пространственной системы сил. При решении
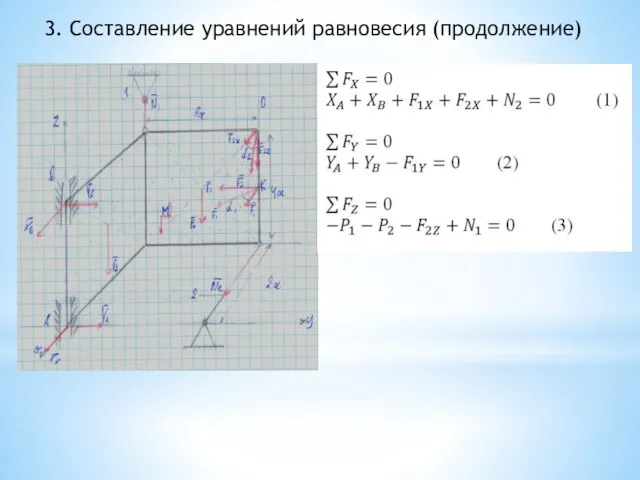
- 75. 3. Составление уравнений равновесия (продолжение)
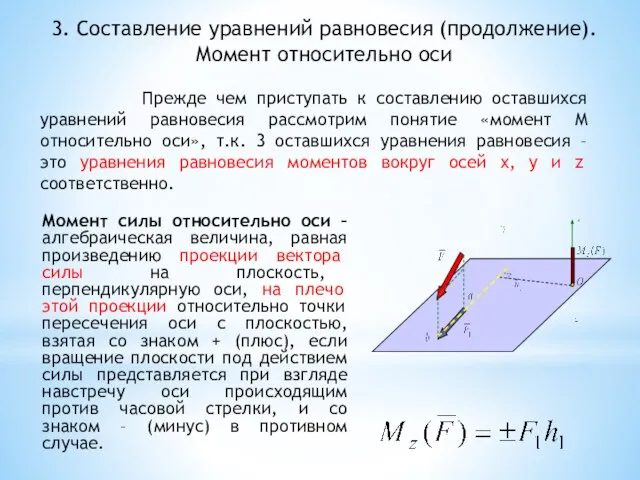
- 76. 3. Составление уравнений равновесия (продолжение). Момент относительно оси Прежде чем приступать к составлению оставшихся уравнений равновесия
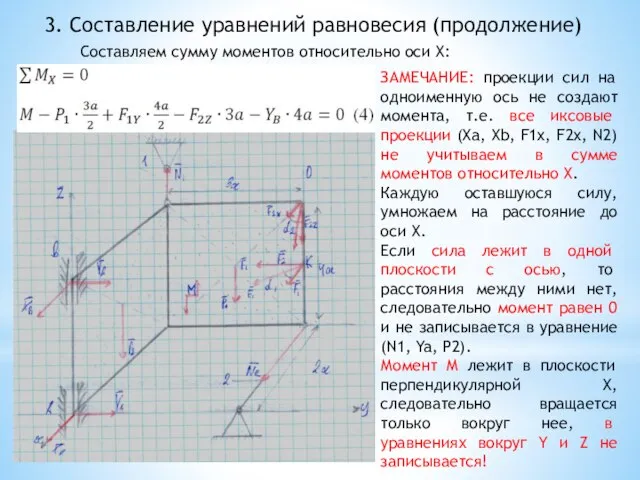
- 77. 3. Составление уравнений равновесия (продолжение) Составляем сумму моментов относительно оси X: ЗАМЕЧАНИЕ: проекции сил на одноименную
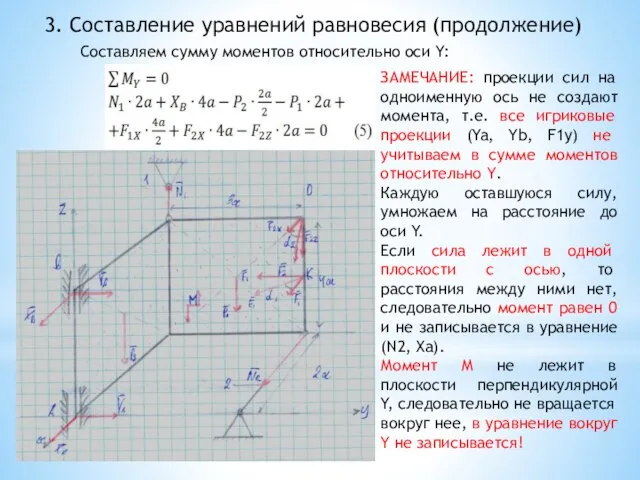
- 78. 3. Составление уравнений равновесия (продолжение) Составляем сумму моментов относительно оси Y: ЗАМЕЧАНИЕ: проекции сил на одноименную
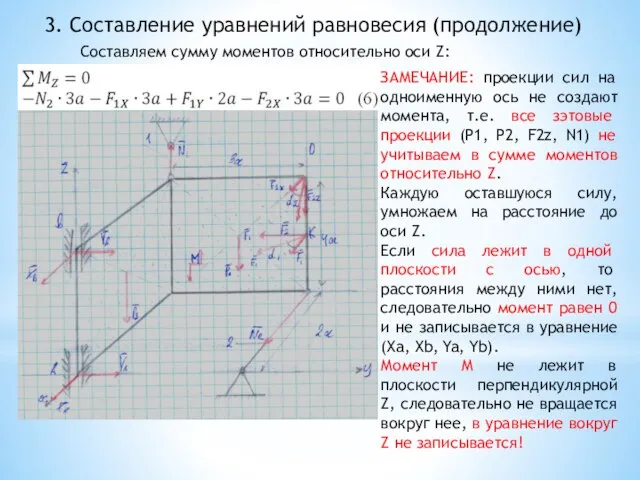
- 79. 3. Составление уравнений равновесия (продолжение) Составляем сумму моментов относительно оси Z: ЗАМЕЧАНИЕ: проекции сил на одноименную
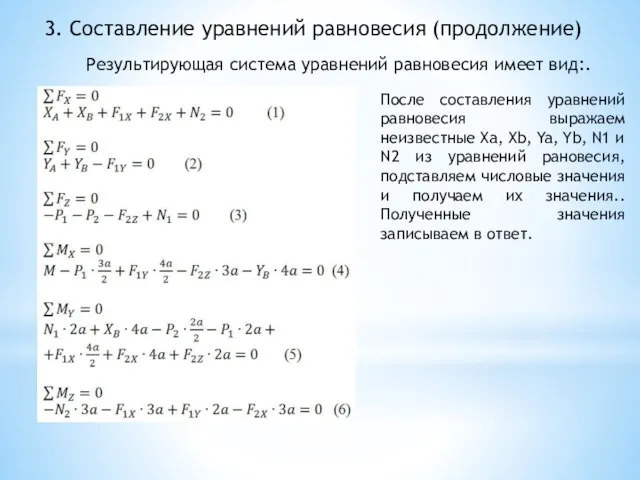
- 80. 3. Составление уравнений равновесия (продолжение) Результирующая система уравнений равновесия имеет вид:. После составления уравнений равновесия выражаем
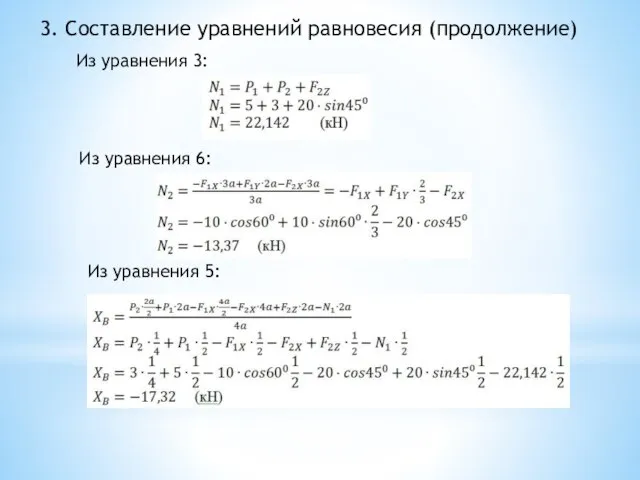
- 81. 3. Составление уравнений равновесия (продолжение) Из уравнения 3: Из уравнения 6: Из уравнения 5:
- 82. 3. Составление уравнений равновесия (продолжение) Из уравнения 4: Из уравнения 2: Из уравнения 1: В ответ
- 83. 4. Выводы. 1.Статикой называют раздел теоретической механики, изучающий равновесие тел. 2. Момент силы F относительно точки
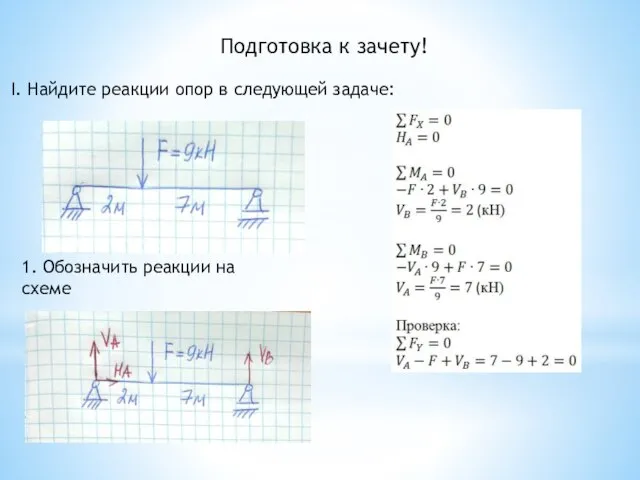
- 84. Подготовка к зачету! I. Найдите реакции опор в следующей задаче: 1. Обозначить реакции на схеме
- 85. Подготовка к зачету! I. Найдите реакции опор в следующей задаче: 1. Обозначить реакции на схеме
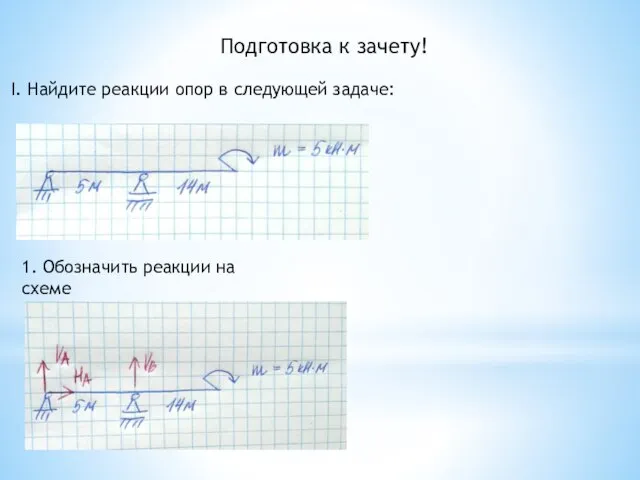
- 86. Подготовка к зачету! I. Найдите реакции опор в следующей задаче: 1. Обозначить реакции на схеме
- 87. Подготовка к зачету! I. Найдите реакции опор в следующей задаче: 1. Обозначить реакции на схеме
- 88. Подготовка к зачету! I. Найдите реакции опор в следующей задаче: 1. Обозначить реакции на схеме
- 89. Разбор задания №8 «Динамика материальной точки»: 1.Выбор исходных данных. Нанесение внешних сил на схему. Проекции сил.
- 90. Разбор задания №9 «Динамика. Принцип Даламбера»: 1.Выбор исходных данных. Нанесение внешних сил на схему. 2. Принцип
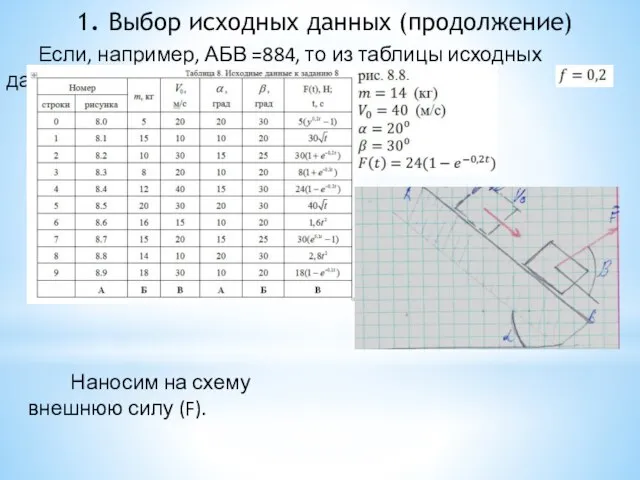
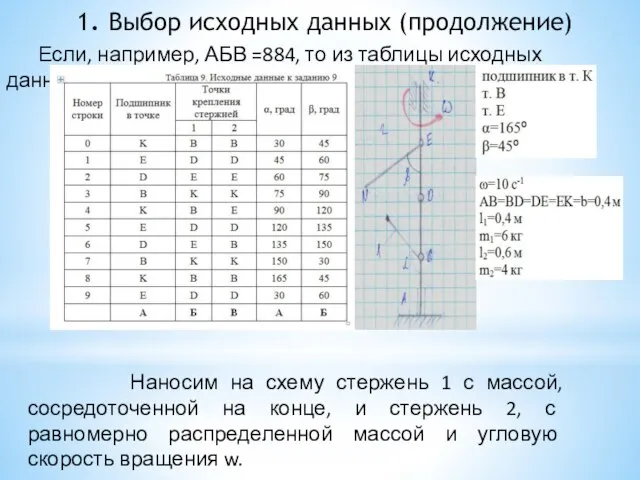
- 91. 1. Выбор исходных данных (продолжение) Если, например, АБВ =884, то из таблицы исходных данных: Наносим на
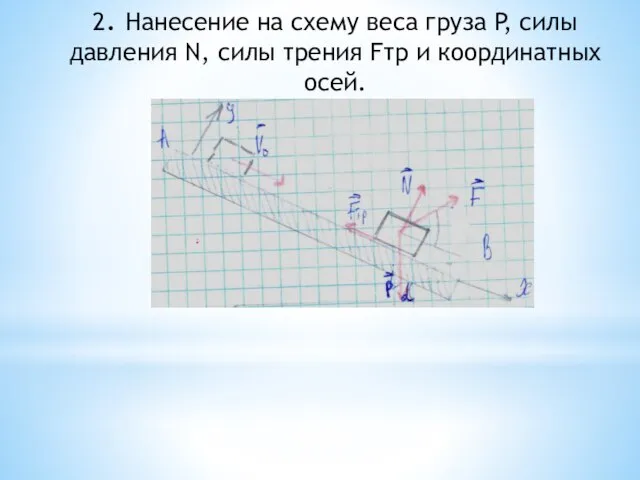
- 92. 2. Нанесение на схему веса груза P, силы давления N, силы трения Fтр и координатных осей.
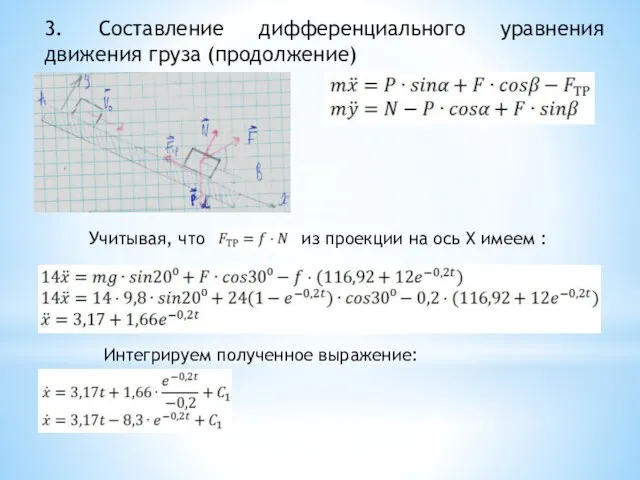
- 93. Общий вид дифференциального уравнения движения груза по наклонной плоскости: 3. Составление дифференциального уравнения движения груза. Проецируем
- 94. 3. Составление дифференциального уравнения движения груза (продолжение) Учитывая, что из проекции на ось X имеем :
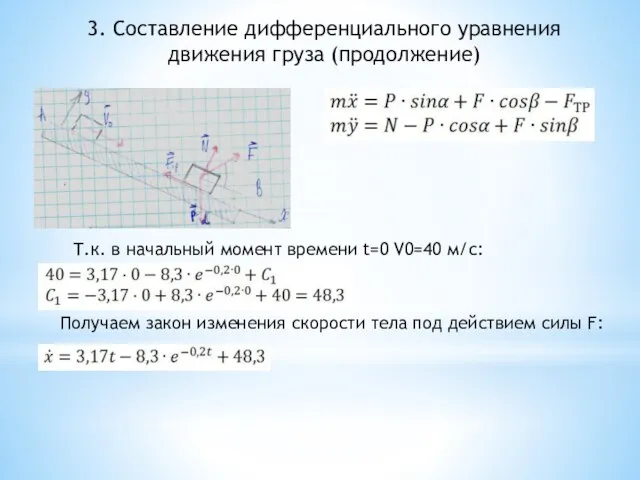
- 95. 3. Составление дифференциального уравнения движения груза (продолжение) Т.к. в начальный момент времени t=0 V0=40 м/с: Получаем
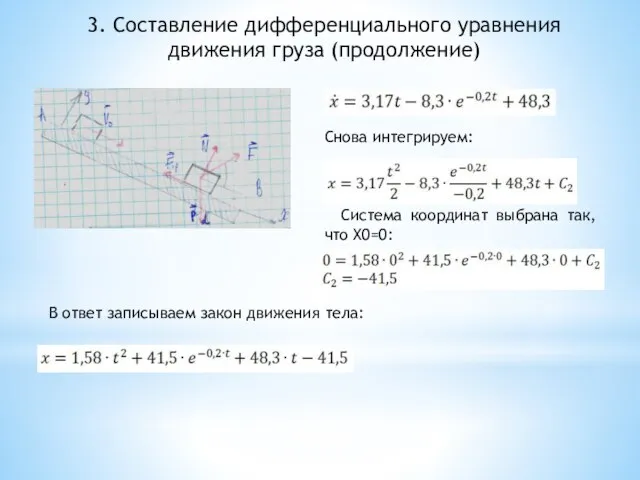
- 96. 3. Составление дифференциального уравнения движения груза (продолжение) Снова интегрируем: Система координат выбрана так, что X0=0: В
- 97. 1. Выбор исходных данных (продолжение) Если, например, АБВ =884, то из таблицы исходных данных: Наносим на
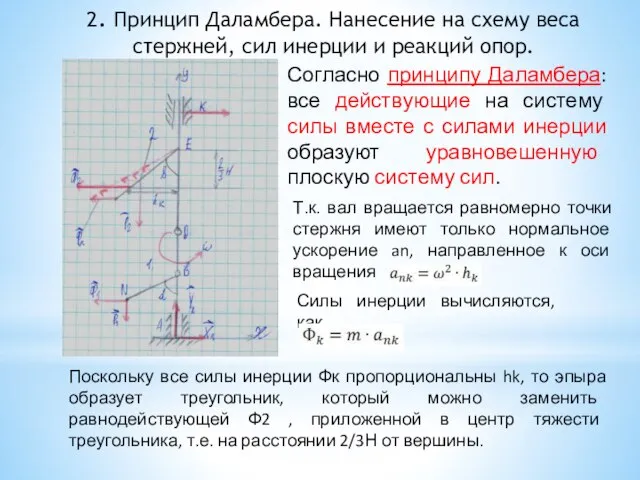
- 98. 2. Принцип Даламбера. Нанесение на схему веса стержней, сил инерции и реакций опор. Согласно принципу Даламбера:
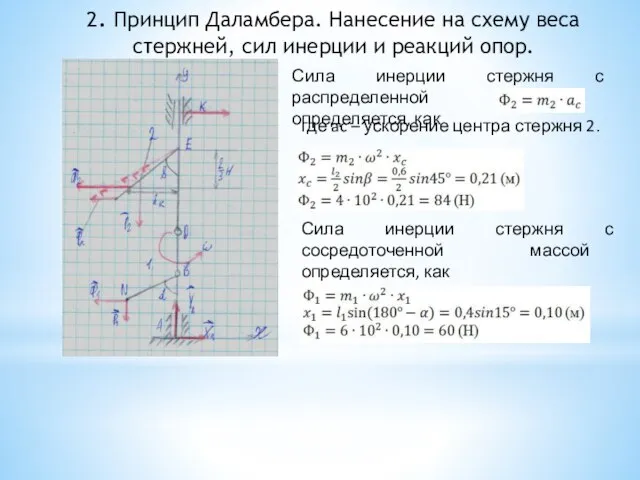
- 99. 2. Принцип Даламбера. Нанесение на схему веса стержней, сил инерции и реакций опор. Сила инерции стержня
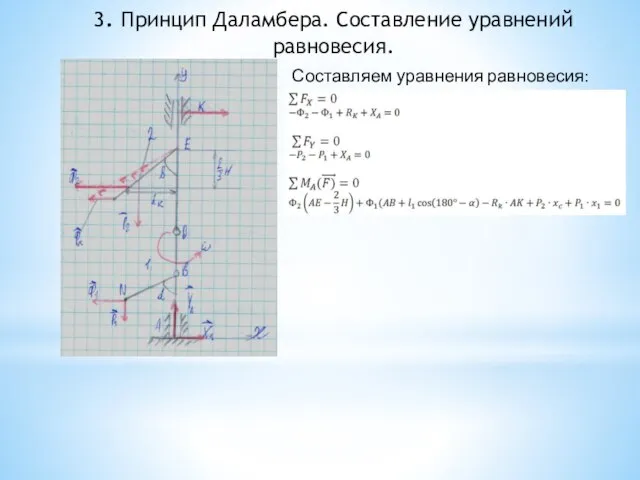
- 100. 3. Принцип Даламбера. Составление уравнений равновесия. Составляем уравнения равновесия:
- 101. 4. Выводы. 1.Динамикой называют раздел теоретической механики, изучающий равновесие движущихся систем. 2. При решении задачи на
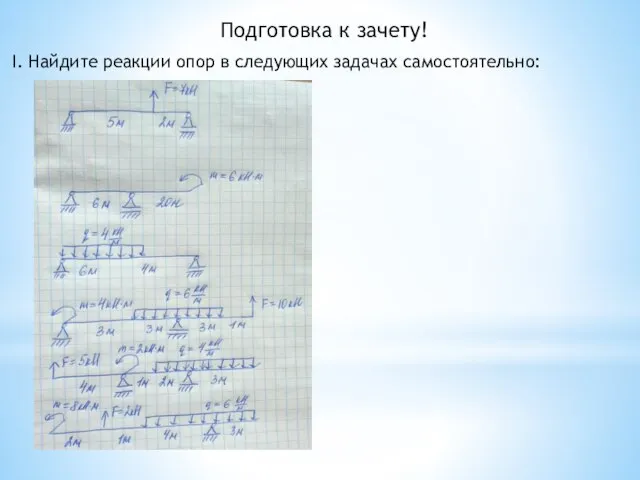
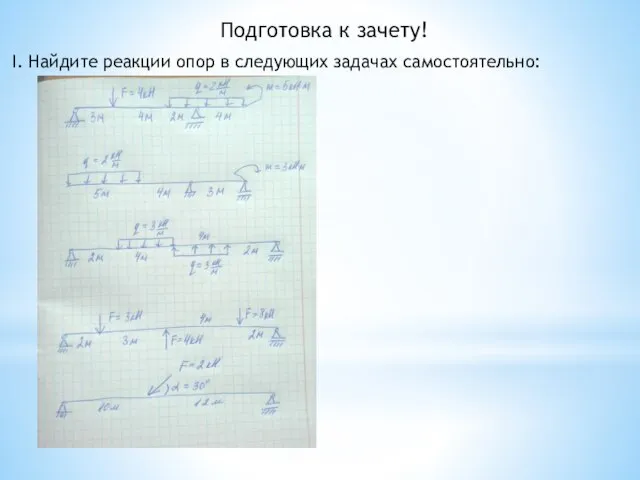
- 102. Подготовка к зачету! I. Найдите реакции опор в следующих задачах самостоятельно:
- 103. Подготовка к зачету! I. Найдите реакции опор в следующих задачах самостоятельно:
- 105. Скачать презентацию
Слайд 2Литература:
Ильин В.Н., Полянин В.Д. Прикладная механика. Часть I. Механика недеформируемого твердого тела.
Литература:
Ильин В.Н., Полянин В.Д. Прикладная механика. Часть I. Механика недеформируемого твердого тела.
Слайд 3Выбор исходных данных.
Вариант задания определяется совокупностью трех цифр, условно обозначаемой буквами АБВ.
Выбор исходных данных.
Вариант задания определяется совокупностью трех цифр, условно обозначаемой буквами АБВ.
Слайд 4Выбор исходных данных.
Вариант задания определяется совокупностью трех цифр, условно обозначаемой буквами АБВ.
Выбор исходных данных.
Вариант задания определяется совокупностью трех цифр, условно обозначаемой буквами АБВ.
Слайд 5Пример оформления титульного листа контрольных работ
Пример оформления титульного листа контрольных работ
Слайд 6Разбор задания №1 «Кинематика точки»:
Выбор исходных данных.
Определение уравнения траектории и построение её
Разбор задания №1 «Кинематика точки»:
Выбор исходных данных.
Определение уравнения траектории и построение её
Слайд 7
1. Выбор исходных данных (продолжение)
Если, например, АБВ = 301, то из таблицы
1. Выбор исходных данных (продолжение)
Если, например, АБВ = 301, то из таблицы
Слайд 8
2. Определение уравнения траектории и построение её на чертеже.
Уравнение траектории получаем, исключением
2. Определение уравнения траектории и построение её на чертеже.
Уравнение траектории получаем, исключением
Слайд 9
2. Определение уравнения траектории и построение её на чертеже (продолжение)
Строим по
2. Определение уравнения траектории и построение её на чертеже (продолжение)
Строим по
Слайд 10
.
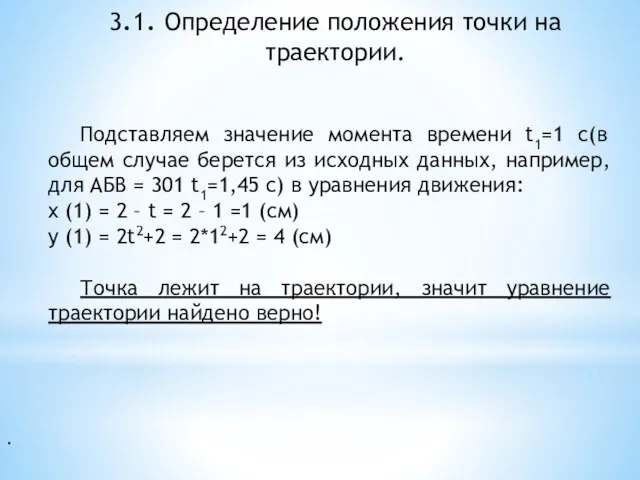
3.1. Определение положения точки на траектории.
Подставляем значение момента времени t1=1 с(в
.
3.1. Определение положения точки на траектории.
Подставляем значение момента времени t1=1 с(в
Слайд 113.2. Определение полного вектора скорости.
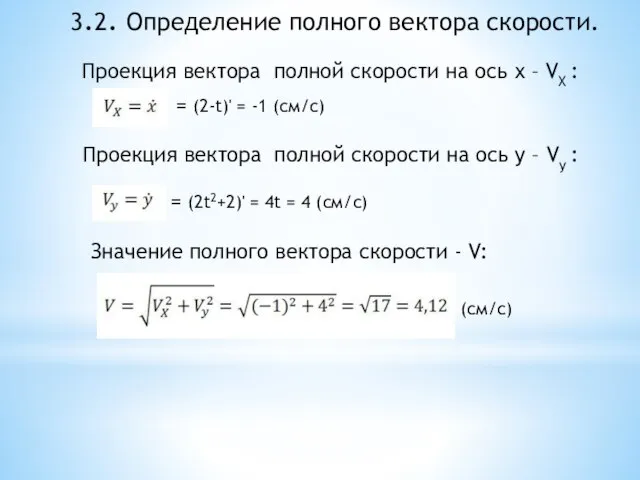
Проекция вектора полной скорости на ось х –
3.2. Определение полного вектора скорости.
Проекция вектора полной скорости на ось х –
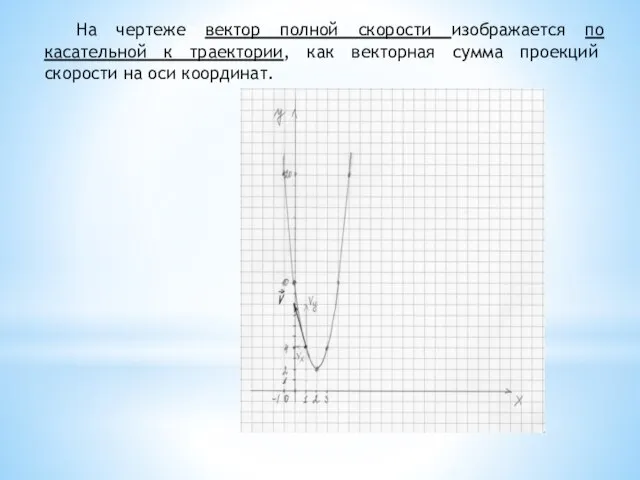
Слайд 12 На чертеже вектор полной скорости изображается по касательной к траектории, как векторная
На чертеже вектор полной скорости изображается по касательной к траектории, как векторная
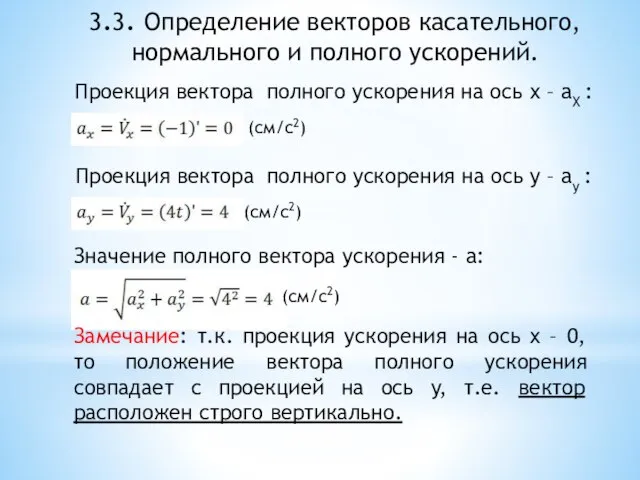
Слайд 133.3. Определение векторов касательного, нормального и полного ускорений.
Проекция вектора полного ускорения на
3.3. Определение векторов касательного, нормального и полного ускорений.
Проекция вектора полного ускорения на
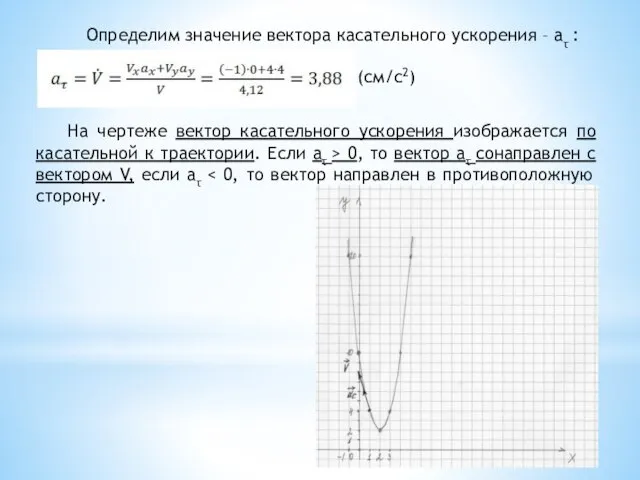
Слайд 14Определим значение вектора касательного ускорения – aτ :
(см/c2)
На чертеже вектор
Определим значение вектора касательного ускорения – aτ :
(см/c2)
На чертеже вектор
Слайд 15
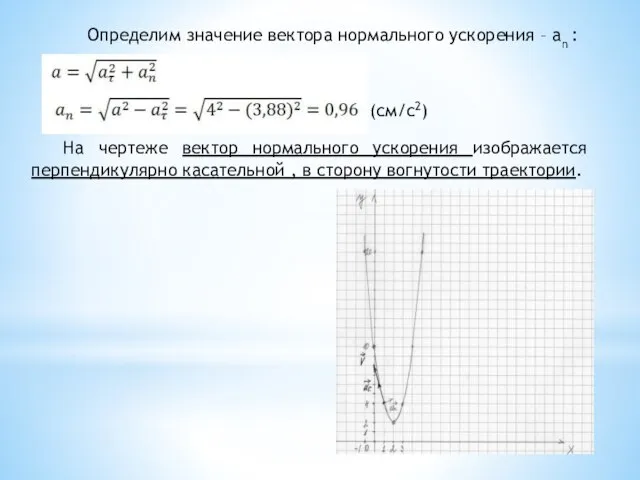
Определим значение вектора нормального ускорения – an :
(см/c2)
На чертеже
Определим значение вектора нормального ускорения – an :
(см/c2)
На чертеже
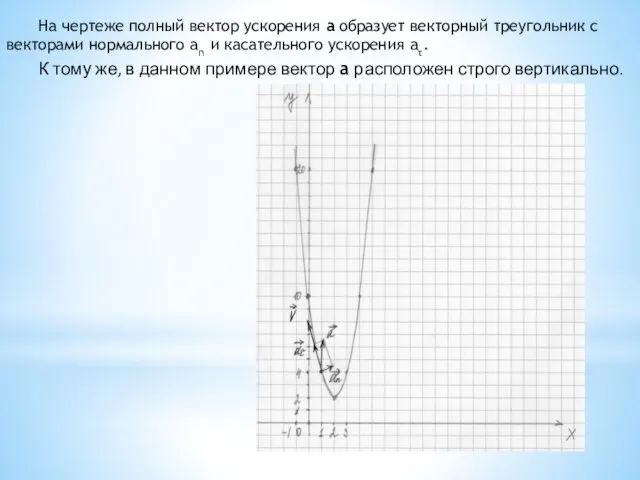
Слайд 16 На чертеже полный вектор ускорения a образует векторный треугольник с векторами
На чертеже полный вектор ускорения a образует векторный треугольник с векторами
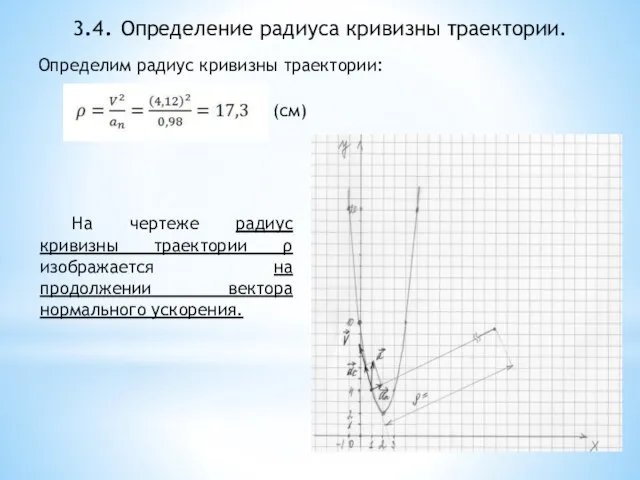
Слайд 173.4. Определение радиуса кривизны траектории.
Определим радиус кривизны траектории:
(см)
На чертеже радиус
3.4. Определение радиуса кривизны траектории.
Определим радиус кривизны траектории:
(см)
На чертеже радиус
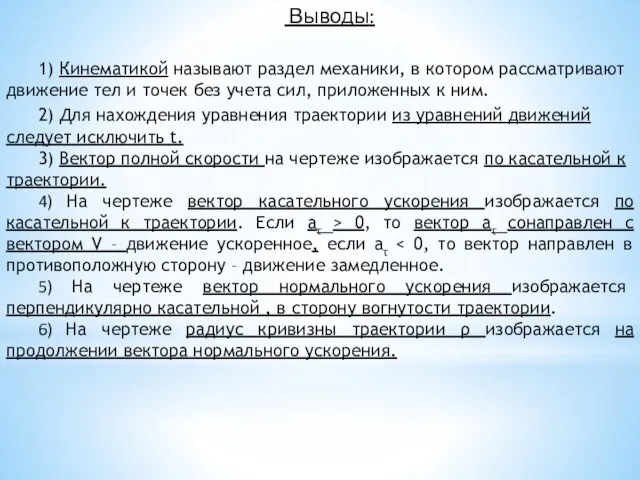
Слайд 18 Выводы:
1) Кинематикой называют раздел механики, в котором рассматривают движение тел
Выводы:
1) Кинематикой называют раздел механики, в котором рассматривают движение тел
Слайд 19Разбор задания №2 «Кинематика твердого тела»:
1.Выбор исходных данных.
2.Определение скорости и
Разбор задания №2 «Кинематика твердого тела»:
1.Выбор исходных данных.
2.Определение скорости и
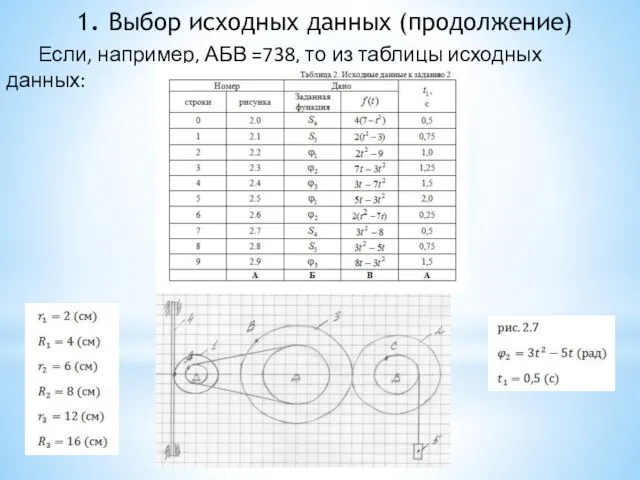
Слайд 20
1. Выбор исходных данных (продолжение)
Если, например, АБВ =738, то из таблицы исходных
1. Выбор исходных данных (продолжение)
Если, например, АБВ =738, то из таблицы исходных
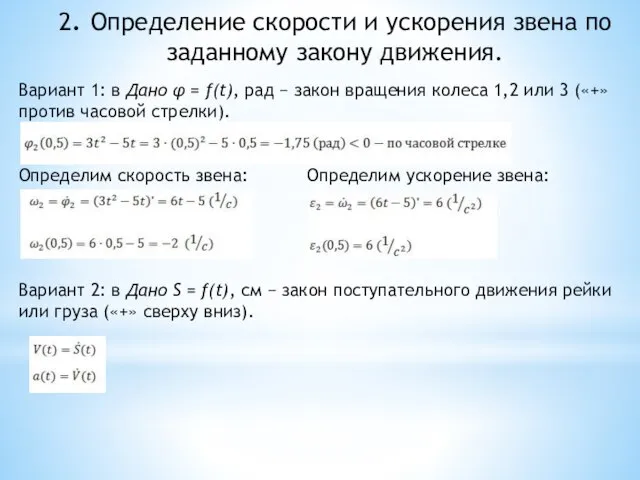
Слайд 21
2. Определение скорости и ускорения звена по заданному закону движения.
Вариант 1: в
2. Определение скорости и ускорения звена по заданному закону движения.
Вариант 1: в
Слайд 22
3.1. Определение угловых скоростей и угловых ускорений колес 1,2 и 3.
Определив
3.1. Определение угловых скоростей и угловых ускорений колес 1,2 и 3.
Определив
Слайд 23
.
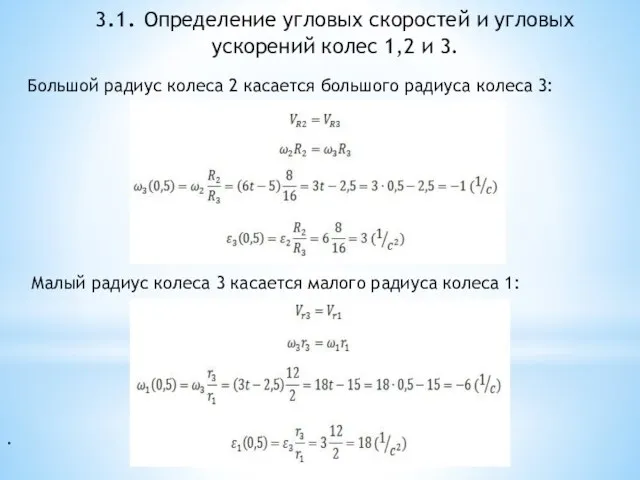
3.1. Определение угловых скоростей и угловых ускорений колес 1,2 и 3.
Большой
.
3.1. Определение угловых скоростей и угловых ускорений колес 1,2 и 3.
Большой
Слайд 243.1. Определение угловых скоростей и угловых ускорений колес 1,2 и 3.
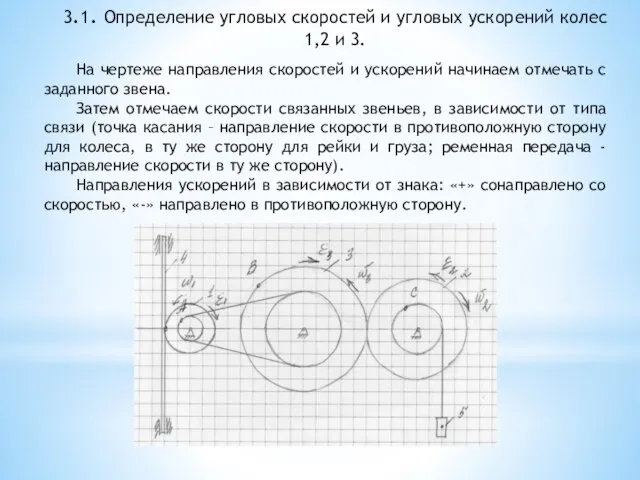
На чертеже
3.1. Определение угловых скоростей и угловых ускорений колес 1,2 и 3.
На чертеже
Слайд 253.2. Определение скоростей и ускорений точек A,B и C.
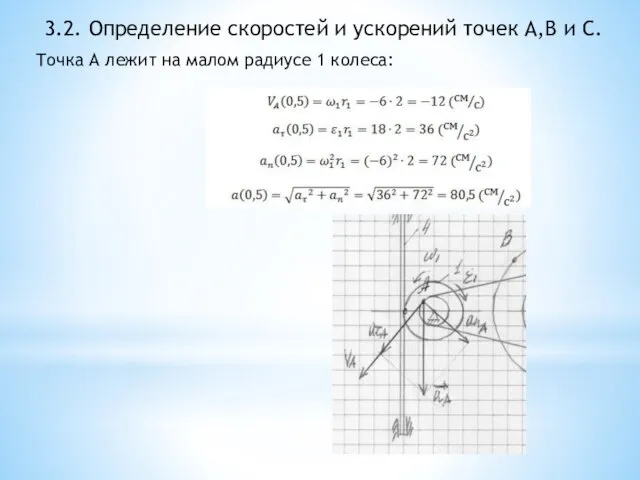
Точка А лежит на
3.2. Определение скоростей и ускорений точек A,B и C.
Точка А лежит на
Слайд 263.2. Определение скоростей и ускорений точек A,B и C.
Точка B лежит на
3.2. Определение скоростей и ускорений точек A,B и C.
Точка B лежит на
Слайд 273.2. Определение скоростей и ускорений точек A,B и C.
Точка С лежит на
3.2. Определение скоростей и ускорений точек A,B и C.
Точка С лежит на
Слайд 28
3.3. Определение скоростей и ускорений рейки и груза.
Рейка имеет точку касания
3.3. Определение скоростей и ускорений рейки и груза.
Рейка имеет точку касания
Слайд 293.3. Определение скоростей и ускорений рейки и груза.
Груз имеет точку касания с
3.3. Определение скоростей и ускорений рейки и груза.
Груз имеет точку касания с
Слайд 31 4. Выводы:
1) В точках, в которых звенья связаны, - точка
4. Выводы:
1) В точках, в которых звенья связаны, - точка
Слайд 32Разбор задания №3 «Кинематика твердого тела»:
1.Выбор исходных данных.
2. Перестроение схемы.
Разбор задания №3 «Кинематика твердого тела»:
1.Выбор исходных данных.
2. Перестроение схемы.
Слайд 33
1. Выбор исходных данных (продолжение)
Если, например, АБВ =163, то из таблицы исходных
1. Выбор исходных данных (продолжение)
Если, например, АБВ =163, то из таблицы исходных
Слайд 34
2. Перестроение схемы.
2. Перестроение схемы.
Слайд 35
2. Определение скоростей всех точек механизма, отмеченных буквами на схеме, и угловых
2. Определение скоростей всех точек механизма, отмеченных буквами на схеме, и угловых
Слайд 36
2. Определение скоростей всех точек механизма, отмеченных буквами на схеме, и
2. Определение скоростей всех точек механизма, отмеченных буквами на схеме, и
Слайд 37
.
2. Определение скоростей всех точек механизма, отмеченных буквами на схеме, и
.
2. Определение скоростей всех точек механизма, отмеченных буквами на схеме, и
Слайд 382. Определение скоростей всех точек механизма, отмеченных буквами на схеме, и угловых
2. Определение скоростей всех точек механизма, отмеченных буквами на схеме, и угловых
Слайд 392. Определение скоростей всех точек механизма, отмеченных буквами на схеме, и угловых
2. Определение скоростей всех точек механизма, отмеченных буквами на схеме, и угловых
Слайд 40 4. Выводы:
1) Мгновенный центр скоростей – точка скорость, которой равна
4. Выводы:
1) Мгновенный центр скоростей – точка скорость, которой равна
Слайд 41Разбор задания №5 «Статика. Равновесие тела под действием плоской системы сил»:
1.Выбор
Разбор задания №5 «Статика. Равновесие тела под действием плоской системы сил»:
1.Выбор
Слайд 42
1. Выбор исходных данных (продолжение)
Если, например, АБВ =092, то из таблицы исходных
1. Выбор исходных данных (продолжение)
Если, например, АБВ =092, то из таблицы исходных
Слайд 43
2. Определение реакций опор.
Конструкция связана с поверхностью через опоры связями (реакциями опор).
2. Определение реакций опор.
Конструкция связана с поверхностью через опоры связями (реакциями опор).
Слайд 44
2.1. Нанесение на схему реакций опор (продолжение).
2.1. Нанесение на схему реакций опор (продолжение).
Слайд 45
.
2.2. Разложение сил на проекции.
Для удобства расчетов раскладываем силы на
.
2.2. Разложение сил на проекции.
Для удобства расчетов раскладываем силы на
Слайд 462.2. Разложение сил на проекции (продолжение)
Разложим силы F1, F2 и реакцию NB
2.2. Разложение сил на проекции (продолжение)
Разложим силы F1, F2 и реакцию NB
Слайд 47 3. Составление уравнений равновесия.
3.1. Понятие момента силы.
Момент силы F относительно
3. Составление уравнений равновесия.
3.1. Понятие момента силы.
Момент силы F относительно
Слайд 483.2. Общий вид уравнений равновесия.
При решении задач равновесия тела под действием
3.2. Общий вид уравнений равновесия.
При решении задач равновесия тела под действием
Слайд 493. Составление уравнений равновесия (продолжение)
Составим уравнение 1 и 2 для рассматриваемой
3. Составление уравнений равновесия (продолжение)
Составим уравнение 1 и 2 для рассматриваемой
Слайд 503. Составление уравнений равновесия (продолжение)
Составим уравнение 3 для рассматриваемой задачи. Записываем
3. Составление уравнений равновесия (продолжение)
Составим уравнение 3 для рассматриваемой задачи. Записываем
Слайд 51
3. Составление уравнений равновесия (продолжение)
Уравнения равновесия для рассматриваемой задачи:
После
3. Составление уравнений равновесия (продолжение)
Уравнения равновесия для рассматриваемой задачи:
После
Слайд 52
3. Составление уравнений равновесия (продолжение)
Из уравнения 3:
Из уравнения 1:
3. Составление уравнений равновесия (продолжение)
Из уравнения 3:
Из уравнения 1:
Слайд 53
3. Составление уравнений равновесия (продолжение)
Из уравнения 2:
Тогда реакция в
3. Составление уравнений равновесия (продолжение)
Из уравнения 2:
Тогда реакция в
Слайд 544. Выводы.
1.Статикой называют раздел теоретической механики, изучающий равновесие тел.
2. Момент силы F
4. Выводы.
1.Статикой называют раздел теоретической механики, изучающий равновесие тел.
2. Момент силы F
Слайд 55Разбор задания №5 «Статика. Равновесие тела под действием плоской системы сил»:
1.Выбор
Разбор задания №5 «Статика. Равновесие тела под действием плоской системы сил»:
1.Выбор
Слайд 56
1. Выбор исходных данных (продолжение)
Если, например, АБВ =092, то из таблицы исходных
1. Выбор исходных данных (продолжение)
Если, например, АБВ =092, то из таблицы исходных
Слайд 57
2.1. Нанесение на схему реакций опор (продолжение).
2.1. Нанесение на схему реакций опор (продолжение).
Слайд 583.1. Общий вид уравнений равновесия для задач равновесия двух тел.
При решении
3.1. Общий вид уравнений равновесия для задач равновесия двух тел.
При решении
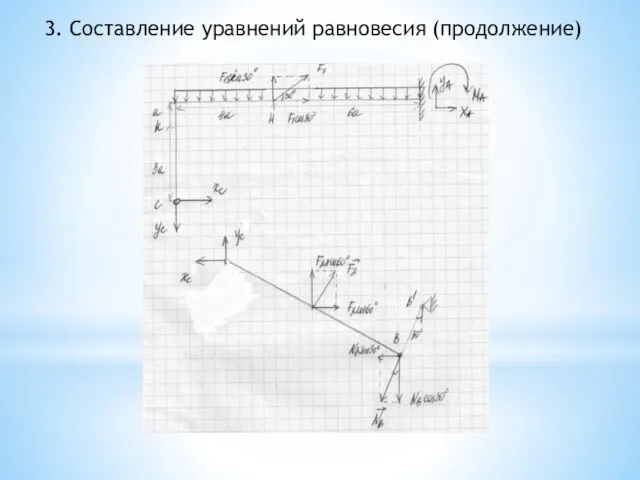
Слайд 593. Составление уравнений равновесия (продолжение)
3. Составление уравнений равновесия (продолжение)
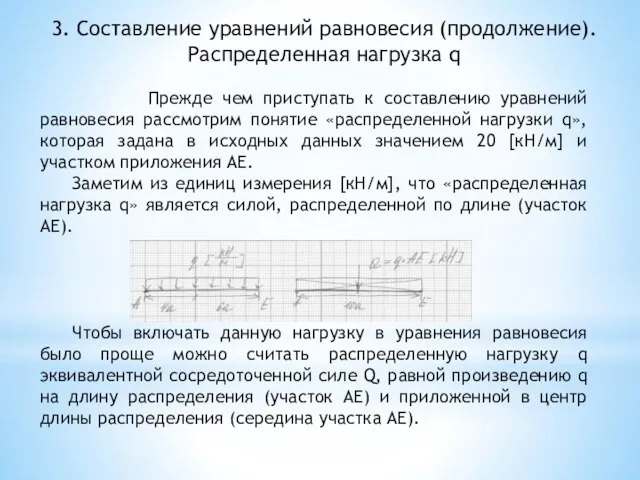
Слайд 603. Составление уравнений равновесия (продолжение). Распределенная нагрузка q
Прежде чем приступать к
3. Составление уравнений равновесия (продолжение). Распределенная нагрузка q
Прежде чем приступать к
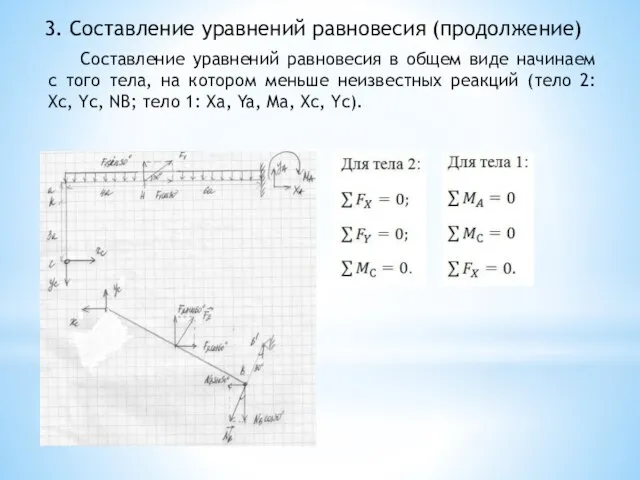
Слайд 613. Составление уравнений равновесия (продолжение)
Составление уравнений равновесия в общем виде начинаем с
3. Составление уравнений равновесия (продолжение)
Составление уравнений равновесия в общем виде начинаем с
Слайд 623. Составление уравнений равновесия (продолжение)
Составим уравнение 1 и 2 для рассматриваемой
3. Составление уравнений равновесия (продолжение)
Составим уравнение 1 и 2 для рассматриваемой
Слайд 633. Составление уравнений равновесия (продолжение)
Составим уравнение 3 для тела 2. Записываем
3. Составление уравнений равновесия (продолжение)
Составим уравнение 3 для тела 2. Записываем
Слайд 643. Составление уравнений равновесия (продолжение)
Составим уравнения 4,5 и 6 для тела
3. Составление уравнений равновесия (продолжение)
Составим уравнения 4,5 и 6 для тела
Слайд 65
3. Составление уравнений равновесия (продолжение)
Уравнения равновесия для рассматриваемой задачи:
После
3. Составление уравнений равновесия (продолжение)
Уравнения равновесия для рассматриваемой задачи:
После
Слайд 66
3. Составление уравнений равновесия (продолжение)
Из уравнения 3:
Из уравнения 1:
3. Составление уравнений равновесия (продолжение)
Из уравнения 3:
Из уравнения 1:
Слайд 67
3. Составление уравнений равновесия (продолжение)
Из уравнения 2:
Тогда реакция в
3. Составление уравнений равновесия (продолжение)
Из уравнения 2:
Тогда реакция в
Слайд 68
3. Составление уравнений равновесия (продолжение)
Из уравнения 6:
Из уравнения 5:
3. Составление уравнений равновесия (продолжение)
Из уравнения 6:
Из уравнения 5:
Слайд 69
3. Составление уравнений равновесия (продолжение)
Тогда реакция в точке A (Ra):
3. Составление уравнений равновесия (продолжение)
Тогда реакция в точке A (Ra):
Слайд 704. Выводы.
1.Статикой называют раздел теоретической механики, изучающий равновесие тел.
2. Момент силы F
4. Выводы.
1.Статикой называют раздел теоретической механики, изучающий равновесие тел.
2. Момент силы F
Слайд 71Разбор задания №7 «Статика. Равновесие тела под действием пространственной системы сил»:
1.Выбор
Разбор задания №7 «Статика. Равновесие тела под действием пространственной системы сил»:
1.Выбор
Слайд 72
1. Выбор исходных данных (продолжение)
Если, например, АБВ =882, то из таблицы исходных
1. Выбор исходных данных (продолжение)
Если, например, АБВ =882, то из таблицы исходных
Слайд 73
2.1. Нанесение на схему реакций опор (продолжение).
2.1. Нанесение на схему реакций опор (продолжение).
Слайд 743.1. Общий вид уравнений равновесия для задач равновесия тела под действием пространственной
3.1. Общий вид уравнений равновесия для задач равновесия тела под действием пространственной
Слайд 753. Составление уравнений равновесия (продолжение)
3. Составление уравнений равновесия (продолжение)
Слайд 763. Составление уравнений равновесия (продолжение). Момент относительно оси
Прежде чем приступать к
3. Составление уравнений равновесия (продолжение). Момент относительно оси
Прежде чем приступать к
Слайд 773. Составление уравнений равновесия (продолжение)
Составляем сумму моментов относительно оси X:
ЗАМЕЧАНИЕ: проекции сил
3. Составление уравнений равновесия (продолжение)
Составляем сумму моментов относительно оси X:
ЗАМЕЧАНИЕ: проекции сил
Слайд 783. Составление уравнений равновесия (продолжение)
Составляем сумму моментов относительно оси Y:
ЗАМЕЧАНИЕ: проекции сил
3. Составление уравнений равновесия (продолжение)
Составляем сумму моментов относительно оси Y:
ЗАМЕЧАНИЕ: проекции сил
Слайд 793. Составление уравнений равновесия (продолжение)
Составляем сумму моментов относительно оси Z:
ЗАМЕЧАНИЕ: проекции сил
3. Составление уравнений равновесия (продолжение)
Составляем сумму моментов относительно оси Z:
ЗАМЕЧАНИЕ: проекции сил
Слайд 803. Составление уравнений равновесия (продолжение)
Результирующая система уравнений равновесия имеет вид:.
После составления
3. Составление уравнений равновесия (продолжение)
Результирующая система уравнений равновесия имеет вид:.
После составления
Слайд 81
3. Составление уравнений равновесия (продолжение)
Из уравнения 3:
Из уравнения 6:
3. Составление уравнений равновесия (продолжение)
Из уравнения 3:
Из уравнения 6:
Слайд 82
3. Составление уравнений равновесия (продолжение)
Из уравнения 4:
Из уравнения 2:
3. Составление уравнений равновесия (продолжение)
Из уравнения 4:
Из уравнения 2:
Слайд 834. Выводы.
1.Статикой называют раздел теоретической механики, изучающий равновесие тел.
2. Момент силы F
4. Выводы.
1.Статикой называют раздел теоретической механики, изучающий равновесие тел.
2. Момент силы F
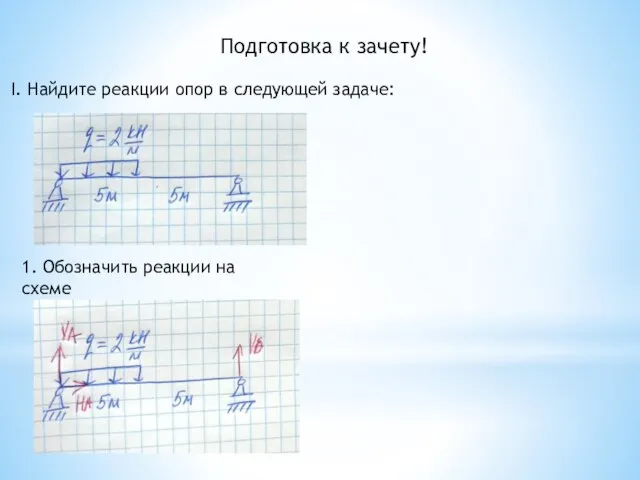
Слайд 84Подготовка к зачету!
I. Найдите реакции опор в следующей задаче:
1. Обозначить реакции на
Подготовка к зачету!
I. Найдите реакции опор в следующей задаче:
1. Обозначить реакции на
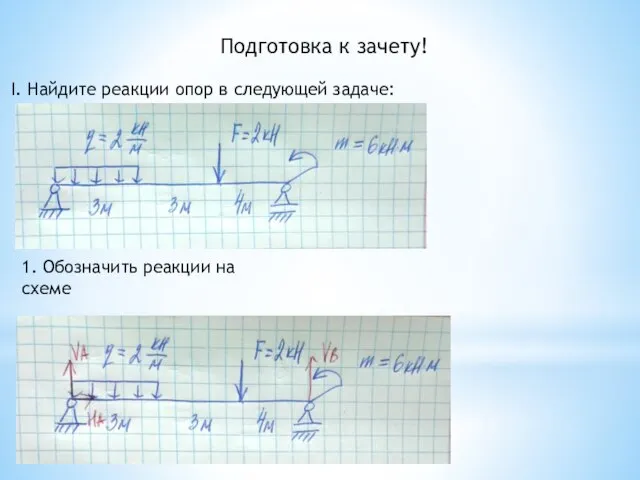
Слайд 85Подготовка к зачету!
I. Найдите реакции опор в следующей задаче:
1. Обозначить реакции на
Подготовка к зачету!
I. Найдите реакции опор в следующей задаче:
1. Обозначить реакции на
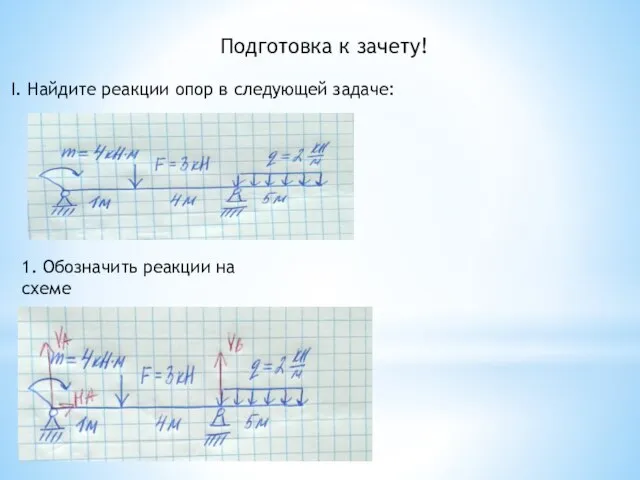
Слайд 86Подготовка к зачету!
I. Найдите реакции опор в следующей задаче:
1. Обозначить реакции на
Подготовка к зачету!
I. Найдите реакции опор в следующей задаче:
1. Обозначить реакции на
Слайд 87Подготовка к зачету!
I. Найдите реакции опор в следующей задаче:
1. Обозначить реакции на
Подготовка к зачету!
I. Найдите реакции опор в следующей задаче:
1. Обозначить реакции на
Слайд 88Подготовка к зачету!
I. Найдите реакции опор в следующей задаче:
1. Обозначить реакции на
Подготовка к зачету!
I. Найдите реакции опор в следующей задаче:
1. Обозначить реакции на
Слайд 89Разбор задания №8 «Динамика материальной точки»:
1.Выбор исходных данных. Нанесение внешних сил
Разбор задания №8 «Динамика материальной точки»:
1.Выбор исходных данных. Нанесение внешних сил
Слайд 90Разбор задания №9 «Динамика. Принцип Даламбера»:
1.Выбор исходных данных. Нанесение внешних сил
Разбор задания №9 «Динамика. Принцип Даламбера»:
1.Выбор исходных данных. Нанесение внешних сил
Слайд 91
1. Выбор исходных данных (продолжение)
Если, например, АБВ =884, то из таблицы исходных
1. Выбор исходных данных (продолжение)
Если, например, АБВ =884, то из таблицы исходных
Слайд 92
2. Нанесение на схему веса груза P, силы давления N, силы
2. Нанесение на схему веса груза P, силы давления N, силы
Слайд 93 Общий вид дифференциального уравнения движения груза по наклонной плоскости:
3. Составление
Общий вид дифференциального уравнения движения груза по наклонной плоскости:
3. Составление
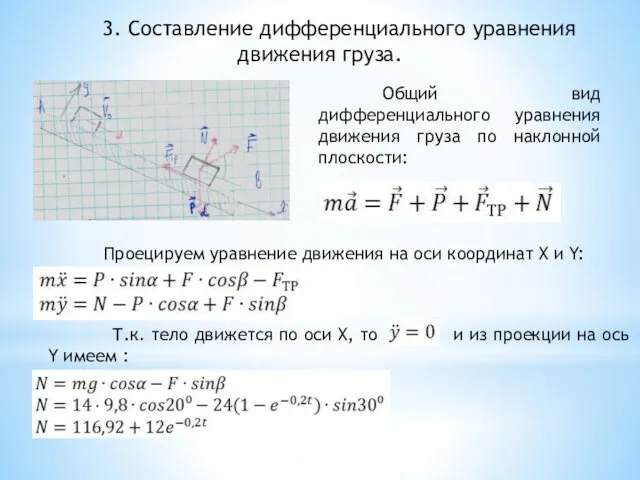
Слайд 943. Составление дифференциального уравнения движения груза (продолжение)
Учитывая, что из проекции на
3. Составление дифференциального уравнения движения груза (продолжение)
Учитывая, что из проекции на
Слайд 953. Составление дифференциального уравнения движения груза (продолжение)
Т.к. в начальный момент
3. Составление дифференциального уравнения движения груза (продолжение)
Т.к. в начальный момент
Слайд 963. Составление дифференциального уравнения движения груза (продолжение)
Снова интегрируем:
Система координат
3. Составление дифференциального уравнения движения груза (продолжение)
Снова интегрируем:
Система координат
Слайд 97
1. Выбор исходных данных (продолжение)
Если, например, АБВ =884, то из таблицы исходных
1. Выбор исходных данных (продолжение)
Если, например, АБВ =884, то из таблицы исходных
Слайд 98
2. Принцип Даламбера. Нанесение на схему веса стержней, сил инерции и
2. Принцип Даламбера. Нанесение на схему веса стержней, сил инерции и
Слайд 99
2. Принцип Даламбера. Нанесение на схему веса стержней, сил инерции и
2. Принцип Даламбера. Нанесение на схему веса стержней, сил инерции и
Слайд 100
3. Принцип Даламбера. Составление уравнений равновесия.
Составляем уравнения равновесия:
3. Принцип Даламбера. Составление уравнений равновесия.
Составляем уравнения равновесия:
Слайд 1014. Выводы.
1.Динамикой называют раздел теоретической механики, изучающий равновесие движущихся систем.
2. При
4. Выводы.
1.Динамикой называют раздел теоретической механики, изучающий равновесие движущихся систем.
2. При
Слайд 102Подготовка к зачету!
I. Найдите реакции опор в следующих задачах самостоятельно:
Подготовка к зачету!
I. Найдите реакции опор в следующих задачах самостоятельно:
Слайд 103Подготовка к зачету!
I. Найдите реакции опор в следующих задачах самостоятельно:
Подготовка к зачету!
I. Найдите реакции опор в следующих задачах самостоятельно:
 Батарейка - её новое будущее
Батарейка - её новое будущее КПД двигателей внутреннего сгорания
КПД двигателей внутреннего сгорания Ответы на вопросы
Ответы на вопросы Презентация на тему Телевидение
Презентация на тему Телевидение  Спектрометры. Линейка contrAA®. Атомно-абсорбционный спектральный анализ
Спектрометры. Линейка contrAA®. Атомно-абсорбционный спектральный анализ Радиоактивность. Закон радиоактивного распада
Радиоактивность. Закон радиоактивного распада Топливный бак. Назначение, устройство
Топливный бак. Назначение, устройство Электрический ток в вакууме
Электрический ток в вакууме Уравнение состояния идеального газа
Уравнение состояния идеального газа Режимы заземления нейтрали
Режимы заземления нейтрали Проектирование средств океанотехники
Проектирование средств океанотехники Презентация на тему Брейн – ринг
Презентация на тему Брейн – ринг 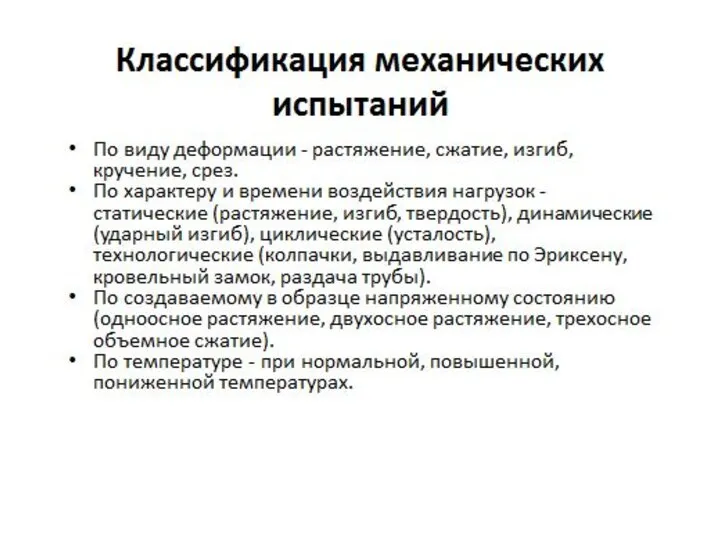 Классификация механических испытаний
Классификация механических испытаний Физико-химические МУН. Лекция 6
Физико-химические МУН. Лекция 6 Физические основы микро и наноэлектроники
Физические основы микро и наноэлектроники Решение задач. Силы тяжести, упругости
Решение задач. Силы тяжести, упругости Связь физики и схемотехники
Связь физики и схемотехники Исследование монометаллических нанокатализаторов
Исследование монометаллических нанокатализаторов Оценивание заданий с развёрнутыми ответами ОГЭ по физике
Оценивание заданий с развёрнутыми ответами ОГЭ по физике Средства измерений и контроля с оптическим и оптико-механическим преобразованием
Средства измерений и контроля с оптическим и оптико-механическим преобразованием Диагностирование систем электроснабжения
Диагностирование систем электроснабжения Закон сохранения механической энергии
Закон сохранения механической энергии Теория автоматического управления. Интегрирующие звенья
Теория автоматического управления. Интегрирующие звенья Энергия магнитного поля. Объемная плотность энергии
Энергия магнитного поля. Объемная плотность энергии Методы получения изображений видимого излучения
Методы получения изображений видимого излучения Интегрированный урок по теме: Копченые продукты со вкусом физики и запахом истории
Интегрированный урок по теме: Копченые продукты со вкусом физики и запахом истории Критерии прочности и дискретизация
Критерии прочности и дискретизация Газовая хроматография
Газовая хроматография