- Применение частотного метода регулирования скорости вращения асинхронного двигателя

Содержание
- 2. В сельскохозяйственном производстве необходимым является вентилирование воздуха внутри помещений, а также изменение потока воздуха, проходящего через
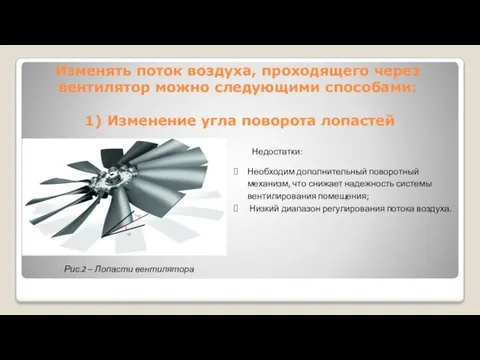
- 3. Изменять поток воздуха, проходящего через вентилятор можно следующими способами: 1) Изменение угла поворота лопастей Недостатки: Необходим
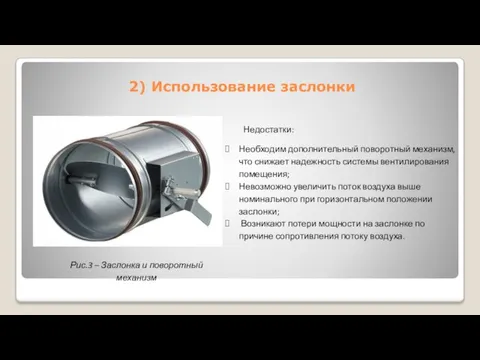
- 4. 2) Использование заслонки Недостатки: Необходим дополнительный поворотный механизм, что снижает надежность системы вентилирования помещения; Невозможно увеличить
- 5. 3) Изменение входных параметров электродвигателя привода вентилятора Рис.4 - Электровентилятор ТS с клино-ременной передачей Данный способ
- 6. В качестве привода к вентилятору можно использовать следующие типы электродвигателей: 1) Двигатель постоянного тока (а) и
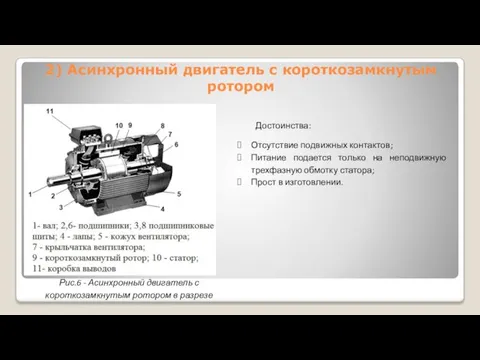
- 7. 2) Асинхронный двигатель с короткозамкнутым ротором Рис.6 - Асинхронный двигатель с короткозамкнутым ротором в разрезе Достоинства:
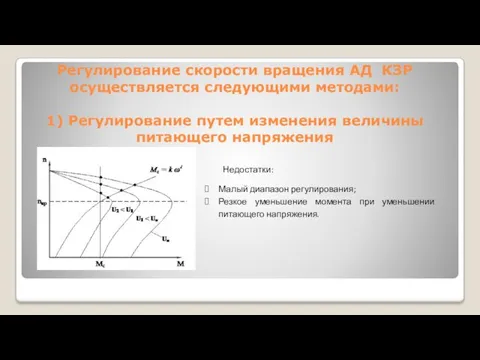
- 8. Регулирование скорости вращения АД КЗР осуществляется следующими методами: 1) Регулирование путем изменения величины питающего напряжения Недостатки:
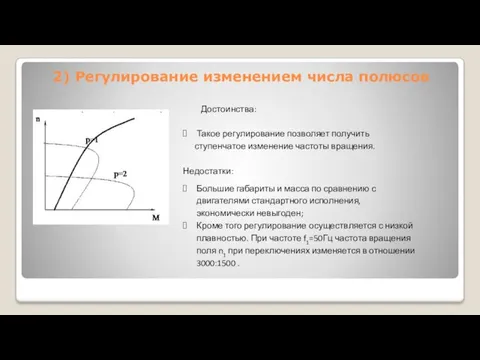
- 9. 2) Регулирование изменением числа полюсов Достоинства: Такое регулирование позволяет получить ступенчатое изменение частоты вращения. Недостатки: Большие
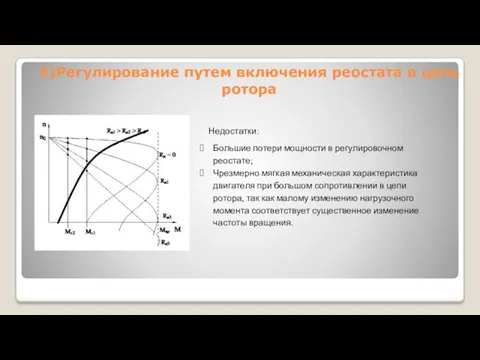
- 10. 3)Регулирование путем включения реостата в цепь ротора Недостатки: Большие потери мощности в регулировочном реостате; Чрезмерно мягкая
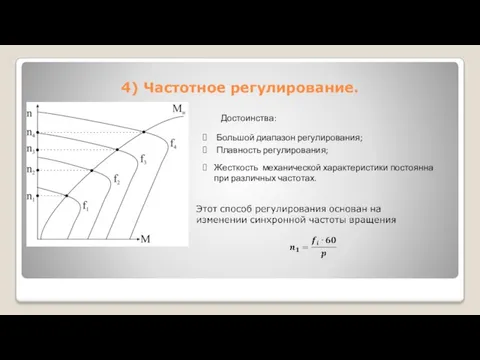
- 11. 4) Частотное регулирование. Достоинства: Большой диапазон регулирования; Плавность регулирования; Жесткость механической характеристики постоянна при различных частотах.
- 12. Чтобы регулировать частоту вращения, необходимо одновременно с изменением частоты fi менять и напряжение питания U1. Для
- 13. Вывод Исходя из проведенного анализа различных способов регулирования входных параметров АД с КЗР выявлено, что наиболее
- 14. Техническая реализация проекта Частотный преобразователь Для осуществления способа регулирования требуется источник питания двигателя переменным током с
- 15. Рис.8 – Внешний вид преобразователя частоты Lenze smd
- 16. 2)Датчики обратной связи В предлагаемой системе управления воздушным потоком нужно применить два датчика обратной связи: Анемометр
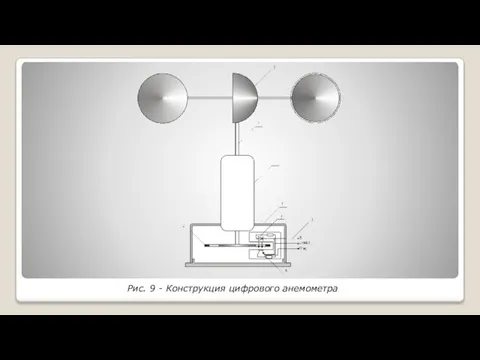
- 17. Рис. 9 - Конструкция цифрового анемометра
- 18. 3)Микроконтроллер Рис. 10 – внешний вид микроконтроллера Получает сигналы от датчиков, обрабатывает из в соответствии с
- 20. Скачать презентацию
Слайд 2В сельскохозяйственном производстве необходимым является вентилирование воздуха внутри помещений, а также изменение
В сельскохозяйственном производстве необходимым является вентилирование воздуха внутри помещений, а также изменение
Слайд 3Изменять поток воздуха, проходящего через вентилятор можно следующими способами:
1) Изменение угла
Изменять поток воздуха, проходящего через вентилятор можно следующими способами: 1) Изменение угла
Слайд 42) Использование заслонки
Недостатки:
Необходим дополнительный поворотный механизм, что снижает надежность системы вентилирования
2) Использование заслонки
Недостатки:
Необходим дополнительный поворотный механизм, что снижает надежность системы вентилирования
Слайд 53) Изменение входных параметров электродвигателя привода вентилятора
Рис.4 - Электровентилятор ТS с клино-ременной
3) Изменение входных параметров электродвигателя привода вентилятора
Рис.4 - Электровентилятор ТS с клино-ременной

Слайд 6В качестве привода к вентилятору можно использовать следующие типы электродвигателей:
1) Двигатель
В качестве привода к вентилятору можно использовать следующие типы электродвигателей: 1) Двигатель

Слайд 72) Асинхронный двигатель с короткозамкнутым ротором
Рис.6 - Асинхронный двигатель с короткозамкнутым ротором
2) Асинхронный двигатель с короткозамкнутым ротором
Рис.6 - Асинхронный двигатель с короткозамкнутым ротором
Слайд 8Регулирование скорости вращения АД КЗР осуществляется следующими методами:
1) Регулирование путем изменения величины
Регулирование скорости вращения АД КЗР осуществляется следующими методами: 1) Регулирование путем изменения величины
Слайд 92) Регулирование изменением числа полюсов
Достоинства:
Такое регулирование позволяет получить ступенчатое изменение частоты
2) Регулирование изменением числа полюсов
Достоинства:
Такое регулирование позволяет получить ступенчатое изменение частоты
Слайд 103)Регулирование путем включения реостата в цепь ротора
Недостатки:
Большие потери мощности в регулировочном
3)Регулирование путем включения реостата в цепь ротора
Недостатки:
Большие потери мощности в регулировочном
Слайд 114) Частотное регулирование.
Достоинства:
Большой диапазон регулирования;
Плавность регулирования;
Жесткость механической характеристики постоянна при различных
4) Частотное регулирование.
Достоинства:
Большой диапазон регулирования;
Плавность регулирования;
Жесткость механической характеристики постоянна при различных
Слайд 12Чтобы регулировать частоту вращения, необходимо одновременно с изменением частоты fi менять и
Чтобы регулировать частоту вращения, необходимо одновременно с изменением частоты fi менять и
Слайд 13Вывод
Исходя из проведенного анализа различных способов регулирования входных параметров АД с КЗР
Вывод
Исходя из проведенного анализа различных способов регулирования входных параметров АД с КЗР
Слайд 14Техническая реализация проекта
Частотный преобразователь
Для осуществления способа регулирования требуется источник питания двигателя
Техническая реализация проекта
Частотный преобразователь
Для осуществления способа регулирования требуется источник питания двигателя

Слайд 15Рис.8 – Внешний вид преобразователя частоты Lenze smd
Рис.8 – Внешний вид преобразователя частоты Lenze smd

Слайд 162)Датчики обратной связи
В предлагаемой системе управления воздушным потоком нужно применить два датчика
2)Датчики обратной связи
В предлагаемой системе управления воздушным потоком нужно применить два датчика
Слайд 17Рис. 9 - Конструкция цифрового анемометра
Рис. 9 - Конструкция цифрового анемометра
Слайд 183)Микроконтроллер
Рис. 10 – внешний вид микроконтроллера
Получает сигналы от датчиков, обрабатывает из в
3)Микроконтроллер
Рис. 10 – внешний вид микроконтроллера
Получает сигналы от датчиков, обрабатывает из в

 Движение по окружности
Движение по окружности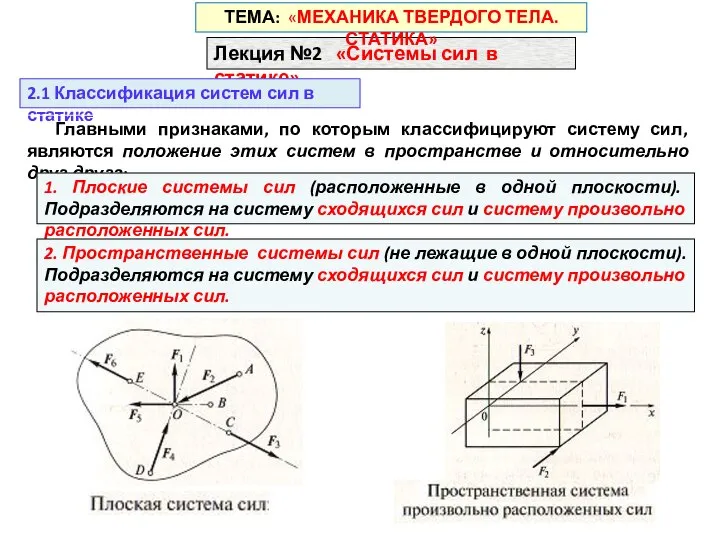 Системы сил в статике
Системы сил в статике Распределение работ по текущему ремонту автомобилей на постовые и участковые
Распределение работ по текущему ремонту автомобилей на постовые и участковые Разделение веществ в хроматографии
Разделение веществ в хроматографии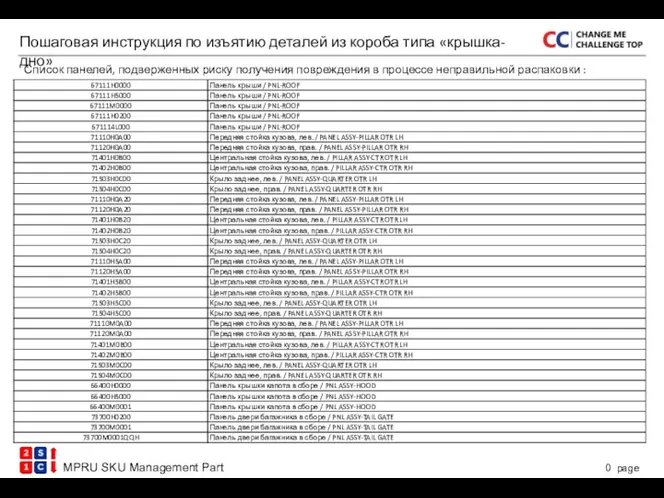 Пошаговая инструкция по изъятию деталей из короба типа крышка-дно
Пошаговая инструкция по изъятию деталей из короба типа крышка-дно Разметчик Фибоначчи
Разметчик Фибоначчи Исследователи области света и цвета
Исследователи области света и цвета Титрование с применением флюоресцентных индикаторов
Титрование с применением флюоресцентных индикаторов Импульс. Работа. Энергия
Импульс. Работа. Энергия Рычаг. Самостоятельная работа
Рычаг. Самостоятельная работа Металлы, их свойства и область применения
Металлы, их свойства и область применения Механика. Основы СТО
Механика. Основы СТО Физические термины. Наблюдения и опыты
Физические термины. Наблюдения и опыты Третий закон Ньютона
Третий закон Ньютона Otáčavé účinky sily
Otáčavé účinky sily Статистическая радиотехника. Спектральный метод анализа прохождения стационарного случайного процесса через линейную цепь
Статистическая радиотехника. Спектральный метод анализа прохождения стационарного случайного процесса через линейную цепь Излучение и спектры
Излучение и спектры Фотоэффект. Законы фотоэффекта. Завершение классической физики
Фотоэффект. Законы фотоэффекта. Завершение классической физики Молекулярно-кинетическая теория
Молекулярно-кинетическая теория Нанотехнологии – толчок в будущее человечества
Нанотехнологии – толчок в будущее человечества Определение перемещений. Лекция 6
Определение перемещений. Лекция 6 33_1_PrZ_t_3_1_3_ElStatika_10SENT2022
33_1_PrZ_t_3_1_3_ElStatika_10SENT2022 Электромагнитное поле. Теория электромагнитного поля
Электромагнитное поле. Теория электромагнитного поля Транзистор. Виды транзисторов
Транзистор. Виды транзисторов ВКР: Анализ обеспечения безопасности плавания при планировании перехода по маршруту: порт Таллинн – порт Клайпеда
ВКР: Анализ обеспечения безопасности плавания при планировании перехода по маршруту: порт Таллинн – порт Клайпеда Методы измерения длительности люминесценции
Методы измерения длительности люминесценции Устройство нанотермометр
Устройство нанотермометр Расчет шатуна. Лекция №11а
Расчет шатуна. Лекция №11а