- Лазерное сканирование (лазерная локация)

Содержание
- 2. Лазерный сканер – это прибор, выполняющий измерения с помощью лазерного излучения. В результате измерения расстояний и
- 3. Сканер выполняет измерения с очень высокой частотой (до нескольких сотен тысяч измерений в секунду), в результате
- 4. Наземное сканирование
- 6. Съёмка зданий и сооружений
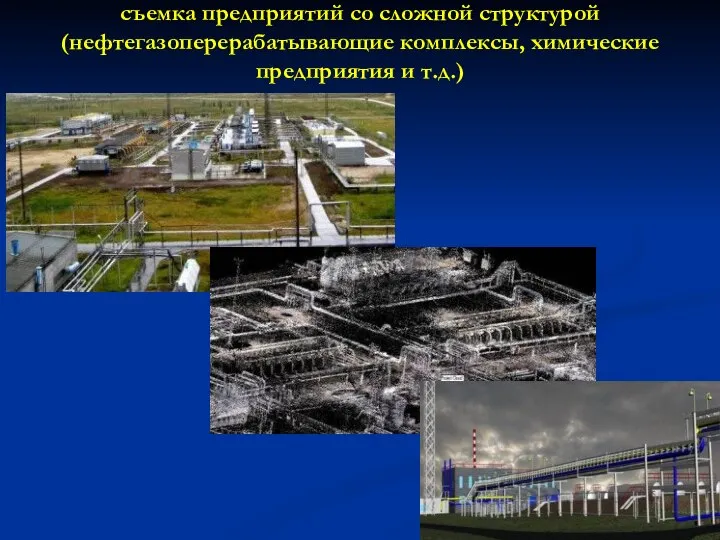
- 7. съемка предприятий со сложной структурой (нефтегазоперерабатывающие комплексы, химические предприятия и т.д.)
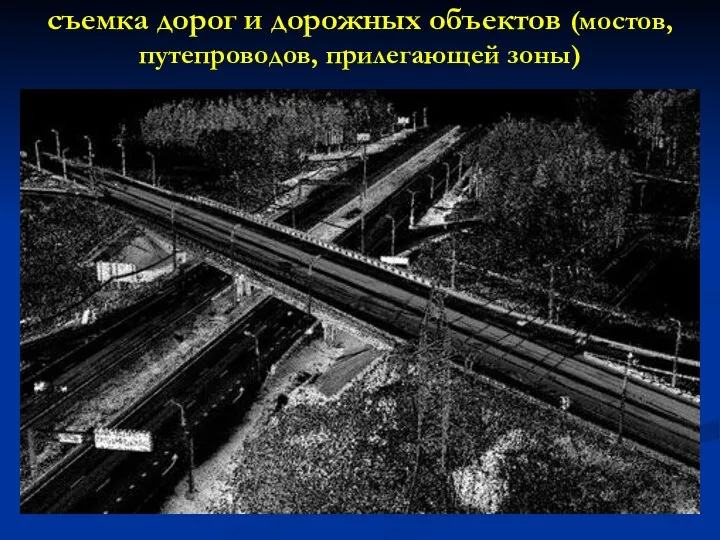
- 8. съемка дорог и дорожных объектов (мостов, путепроводов, прилегающей зоны)
- 9. съемка ситуации и рельефа
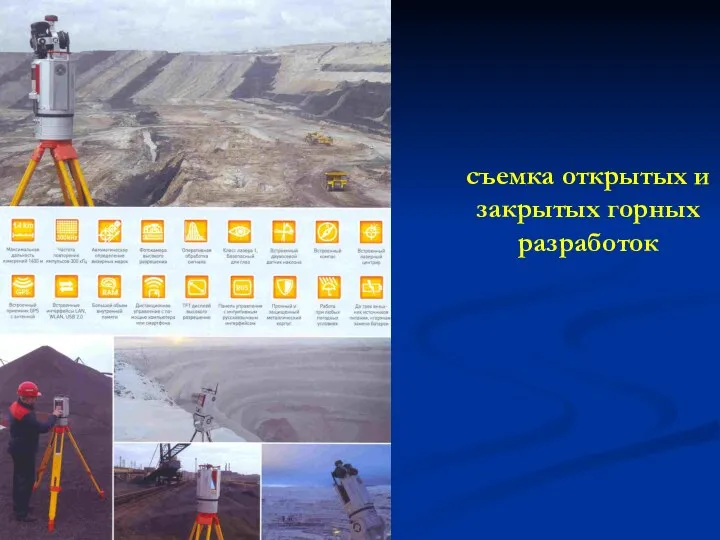
- 10. съемка открытых и закрытых горных разработок
- 13. Лазерные сканеры наземного базирования Leica HDS4400 –уникальное решение для маркшейдерии и горного дела. HDS4400 позволяет выполнять
- 14. Лазерный сканер Trimble FX Trimble FX – это трехмерный лазерный сканер, предназначенный для выполнения съемок в
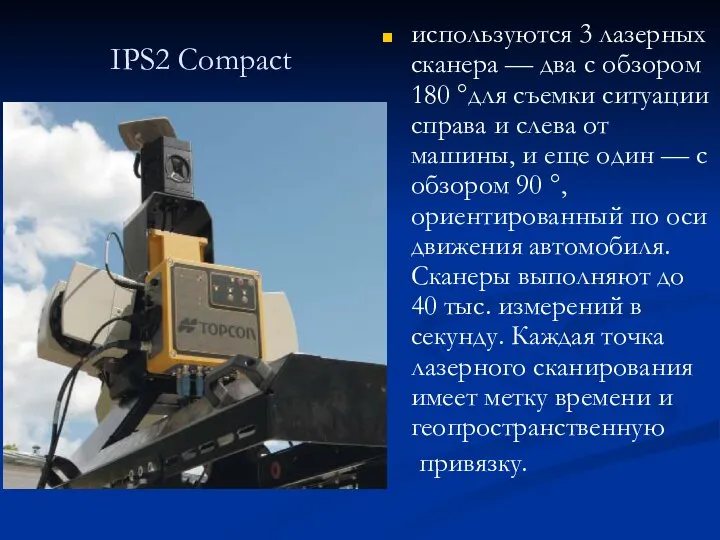
- 15. IPS2 Compact используются 3 лазерных сканера — два с обзором 180 °для съемки ситуации справа и
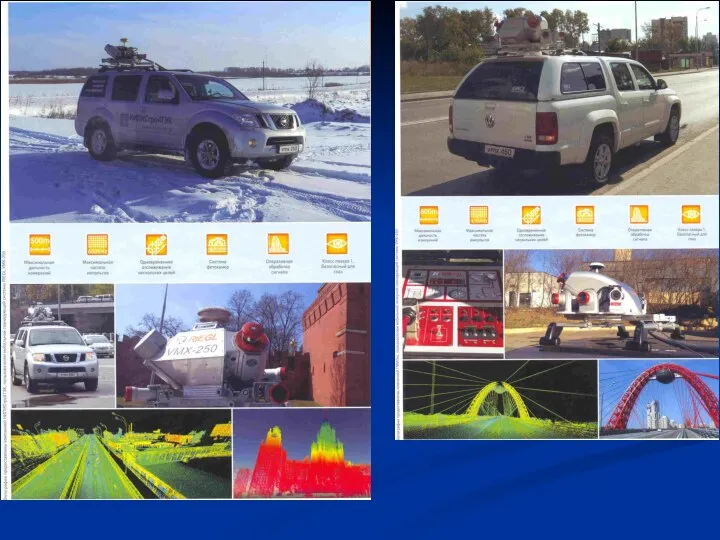
- 16. Мобильное лазерное сканирования
- 18. Трехмерные модели, которые совмещены с топографическим планом, можно представить в виде векторного цифрового плана с масштабом
- 19. Преимущества наземное лазерного сканирования: - оперативный контроль поля измерений; - небольшие временные и материальные затраты на
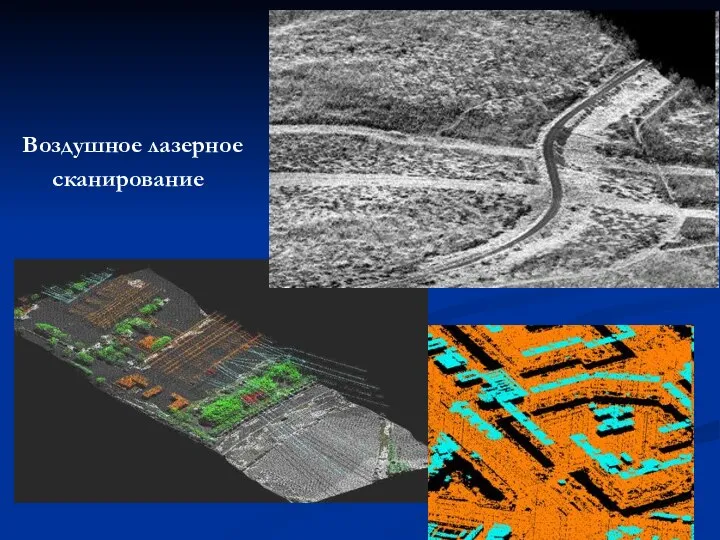
- 20. Воздушное лазерное сканирование (ВЛС)
- 22. Воздушное лазерное сканирование
- 23. Использование ВЛС : - создание топографических планов масштабов 1:1 000 — 1:25 000;
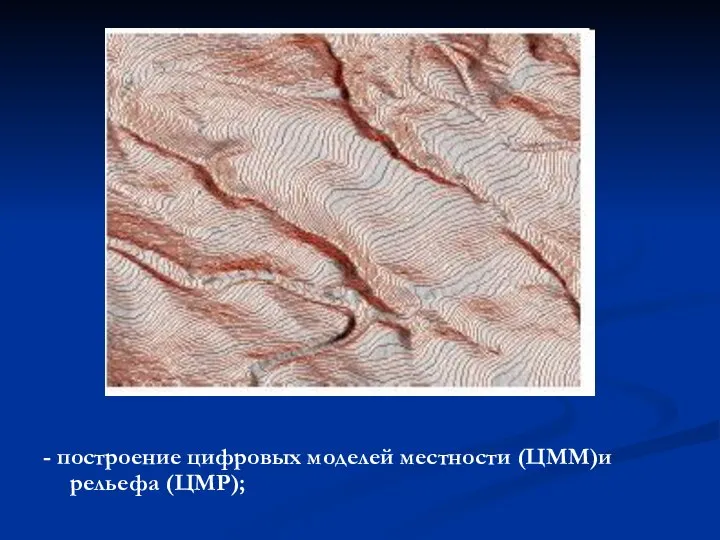
- 24. - построение цифровых моделей местности (ЦММ)и рельефа (ЦМР);
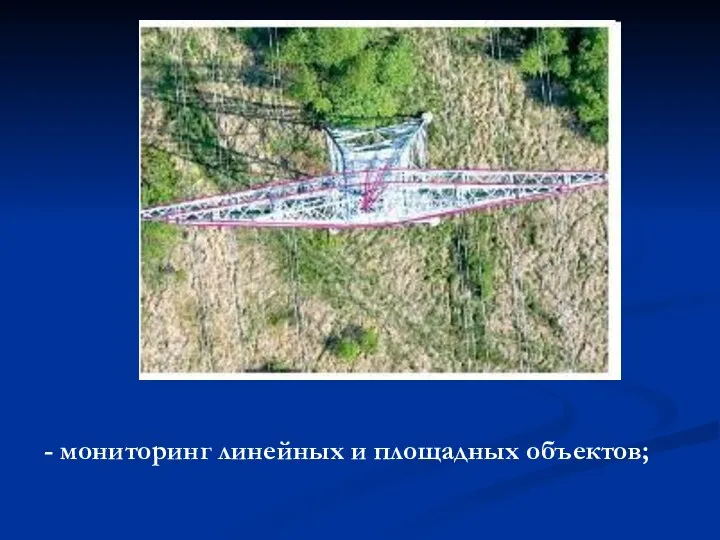
- 25. - мониторинг линейных и площадных объектов;
- 26. - мониторинг природных и техногенных процессов (сейсмическая опасность, космическая или метеорная опасность, лесная пожароопасность, сход снежных
- 27. Воздушное лазерное сканирование (лазерно-локационная съемка) Воздушное лазерное сканирование проводится с высоты 500-1500 м. Средняя точность ВЛС
- 28. Воздушное лазерное сканирование ещё называют лидарной съёмкой от англ. LiDAR - Light Detection And Ranging, что
- 29. Принцип работы воздушного лидара В процессе лазерного сканирования полосы местности, лидар излучает лазерные импульсы в плоскости,
- 31. В составе лидара имеется навигационный комплекс, который обеспечивает определение трех пространствен-ных координат положения сканера X, Y,
- 32. Области применения: Топографическая съемка рельефа и создание цифровых моделей рельефа высокой точности Инвентаризация земельно-имущественного комплекса планирование
- 33. Преимущества технологии: получение истинного рельефа даже под кронами деревьев определение местоположения и формы объектов сложной структуры,
- 34. получение топографических карт и планов местности без явных ориентиров (полностью заснеженная территория, тундра, пустыня) Геодезическая поддержка
- 35. Высокая производительность На практике достигнута производительность съемки в 500–600 км за один аэросъемочный день для линейных
- 36. Недостатки и особенности лазерно-локационного метода съемки Сильная зависимость от состояния атмосферы ( дождь, туман, дымка, низкая
- 37. Воздушное лазерное сканирование, как правило, выполняется в комплексе с цифровой аэрофотосъемкой. Трехмерное облако точек лазерных отражений
- 38. Техника выполнения лазерной (лидарной) съёмки Сканер измеряет расстояние до объекта и два угла, что дает возможность
- 39. Пользователь задает шаг сканирования, и вращающаяся призма распределяет лазерный пучок по вертикали, а сервопривод, поворачивая блок
- 40. После того, как произведены измерения, начинается процесс обработки. Изначально, сырые измерения представляют собой «облако» точек, которые
- 41. Обработка данных лазерного сканирования Изначально, сырые измерения представляют собой «облако» точек, которые необходимо представить в виде
- 42. 1. «Сшивка» сканов Во время съемки объекта, для полного покрытия поверхности, требуется провести несколько сканов. Для
- 43. 2. Геопривязка Позволяет привязать каждый скан или преобразовать все измерения в заданную систему координат. Начало системы
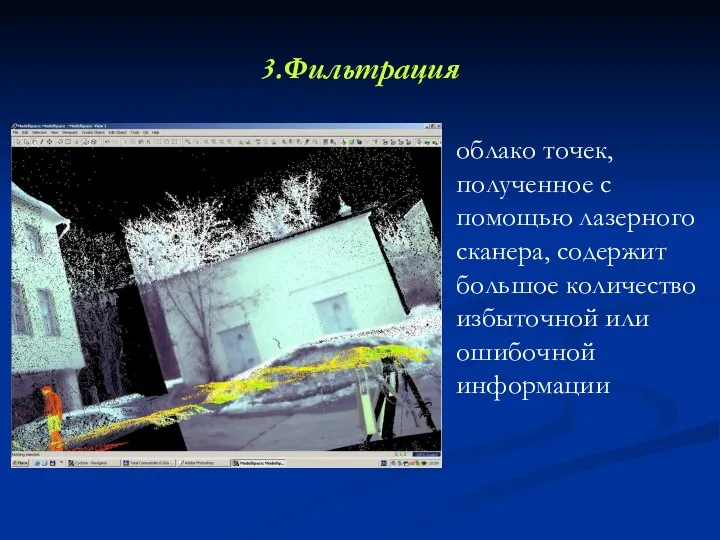
- 44. 3.Фильтрация облако точек, полученное с помощью лазерного сканера, содержит большое количество избыточной или ошибочной информации
- 45. При фильтрации: понижается плотность, убирая повторные точки в облаке; убираются шумовые «вылетевшие» точки путем вычисления превышения
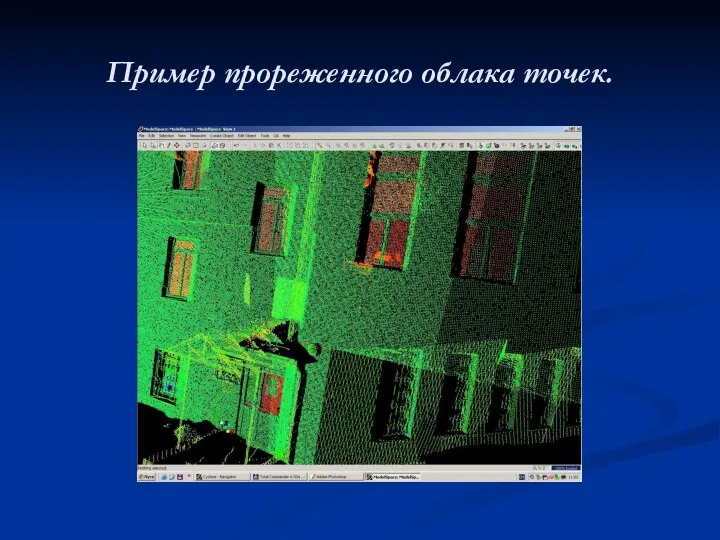
- 46. Пример прореженного облака точек.
- 47. 4. Классификация точек Проводится в 2 основных этапа: Выделение точек земли. Классификация других объектов (растительность, дороги,
- 48. Классификация растительности Классификация выделение крыш
- 49. Лазерное сканирование 1
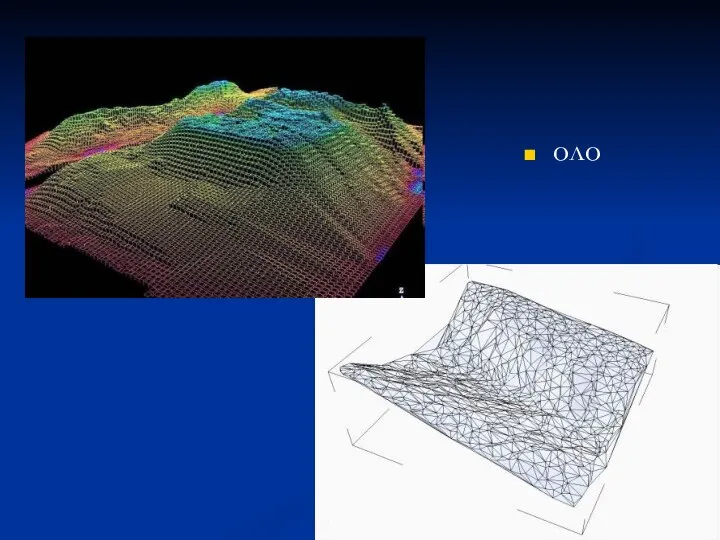
- 50. 5. Создание поверхностей На данном этапе необходимо представить “облака” точек математически описываемыми поверхностями. С помощью прикладного
- 51. оло
- 52. Созданные подобным образом поверхности, могут быть экспортированы в любые CAD и 3D-приложения. Если сканирование сопровождается цифровой
- 54. Скачать презентацию
Слайд 3Сканер выполняет измерения с очень высокой частотой (до нескольких сотен тысяч измерений
Сканер выполняет измерения с очень высокой частотой (до нескольких сотен тысяч измерений
Слайд 4Наземное сканирование
Наземное сканирование


Слайд 6Съёмка зданий и сооружений
Съёмка зданий и сооружений

Слайд 7съемка предприятий со сложной структурой (нефтегазоперерабатывающие комплексы, химические предприятия и т.д.)
съемка предприятий со сложной структурой (нефтегазоперерабатывающие комплексы, химические предприятия и т.д.)
Слайд 8съемка дорог и дорожных объектов (мостов, путепроводов, прилегающей зоны)
съемка дорог и дорожных объектов (мостов, путепроводов, прилегающей зоны)
Слайд 9съемка ситуации и рельефа
съемка ситуации и рельефа

Слайд 10съемка открытых и закрытых горных разработок
съемка открытых и закрытых горных разработок

Слайд 13Лазерные сканеры наземного базирования
Leica HDS4400 –уникальное решение для маркшейдерии и горного дела.
Лазерные сканеры наземного базирования
Leica HDS4400 –уникальное решение для маркшейдерии и горного дела.

Слайд 14Лазерный сканер Trimble FX
Trimble FX – это трехмерный лазерный сканер, предназначенный для
Лазерный сканер Trimble FX
Trimble FX – это трехмерный лазерный сканер, предназначенный для

Слайд 15IPS2 Compact
используются 3 лазерных сканера — два с обзором 180 °для съемки
IPS2 Compact
используются 3 лазерных сканера — два с обзором 180 °для съемки
Слайд 16Мобильное лазерное сканирования
Мобильное лазерное сканирования


Слайд 18Трехмерные модели, которые совмещены с топографическим планом, можно представить в виде векторного
Трехмерные модели, которые совмещены с топографическим планом, можно представить в виде векторного
Слайд 19Преимущества наземное лазерного сканирования:
- оперативный контроль поля измерений;
- небольшие
Преимущества наземное лазерного сканирования:
- оперативный контроль поля измерений;
- небольшие
Слайд 20Воздушное лазерное сканирование (ВЛС)
Воздушное лазерное сканирование (ВЛС)


Слайд 22Воздушное лазерное
сканирование
Воздушное лазерное
сканирование
Слайд 23Использование ВЛС :
- создание топографических планов масштабов
1:1 000 —
Использование ВЛС :
- создание топографических планов масштабов
1:1 000 —

Слайд 24- построение цифровых моделей местности (ЦММ)и рельефа (ЦМР);
- построение цифровых моделей местности (ЦММ)и рельефа (ЦМР);
Слайд 25- мониторинг линейных и площадных объектов;
- мониторинг линейных и площадных объектов;
Слайд 26- мониторинг природных и техногенных процессов (сейсмическая опасность, космическая или метеорная опасность,
- мониторинг природных и техногенных процессов (сейсмическая опасность, космическая или метеорная опасность,
Слайд 27Воздушное лазерное сканирование
(лазерно-локационная съемка)
Воздушное лазерное сканирование проводится с высоты 500-1500
Воздушное лазерное сканирование
(лазерно-локационная съемка)
Воздушное лазерное сканирование проводится с высоты 500-1500

Слайд 28Воздушное лазерное сканирование ещё называют лидарной съёмкой от англ. LiDAR - Light
Воздушное лазерное сканирование ещё называют лидарной съёмкой от англ. LiDAR - Light
Слайд 29Принцип работы воздушного лидара
В процессе лазерного сканирования полосы местности, лидар излучает лазерные
Принцип работы воздушного лидара
В процессе лазерного сканирования полосы местности, лидар излучает лазерные


Слайд 31В составе лидара имеется навигационный комплекс, который обеспечивает определение трех пространствен-ных координат
В составе лидара имеется навигационный комплекс, который обеспечивает определение трех пространствен-ных координат
Слайд 32Области применения:
Топографическая съемка рельефа и создание цифровых моделей рельефа высокой точности
Инвентаризация
Области применения:
Топографическая съемка рельефа и создание цифровых моделей рельефа высокой точности
Инвентаризация
Слайд 33Преимущества технологии:
получение истинного рельефа даже под кронами деревьев
определение местоположения и
Преимущества технологии:
получение истинного рельефа даже под кронами деревьев
определение местоположения и
Слайд 34получение топографических карт и планов местности без явных ориентиров (полностью заснеженная территория,
получение топографических карт и планов местности без явных ориентиров (полностью заснеженная территория,
Слайд 35Высокая производительность
На практике достигнута производительность съемки в 500–600 км за
Высокая производительность
На практике достигнута производительность съемки в 500–600 км за
Слайд 36Недостатки и особенности лазерно-локационного метода съемки
Сильная зависимость от состояния атмосферы
Недостатки и особенности лазерно-локационного метода съемки
Сильная зависимость от состояния атмосферы
Слайд 37Воздушное лазерное сканирование, как правило, выполняется в комплексе с цифровой аэрофотосъемкой.
Трехмерное
Воздушное лазерное сканирование, как правило, выполняется в комплексе с цифровой аэрофотосъемкой.
Трехмерное

Слайд 38Техника выполнения лазерной (лидарной) съёмки
Сканер измеряет расстояние до объекта и два угла,
Техника выполнения лазерной (лидарной) съёмки
Сканер измеряет расстояние до объекта и два угла,
Слайд 39Пользователь задает шаг сканирования, и вращающаяся призма распределяет лазерный пучок по вертикали,
Пользователь задает шаг сканирования, и вращающаяся призма распределяет лазерный пучок по вертикали,
Слайд 40После того, как произведены измерения, начинается процесс обработки.
Изначально, сырые измерения представляют
После того, как произведены измерения, начинается процесс обработки.
Изначально, сырые измерения представляют
Слайд 41Обработка данных лазерного сканирования
Изначально, сырые измерения представляют собой «облако» точек, которые необходимо
Обработка данных лазерного сканирования
Изначально, сырые измерения представляют собой «облако» точек, которые необходимо
Слайд 421. «Сшивка» сканов
Во время съемки объекта, для полного покрытия поверхности,
1. «Сшивка» сканов
Во время съемки объекта, для полного покрытия поверхности,
Слайд 432. Геопривязка
Позволяет привязать каждый скан или преобразовать все измерения в заданную
2. Геопривязка
Позволяет привязать каждый скан или преобразовать все измерения в заданную
Слайд 443.Фильтрация
облако точек, полученное с помощью лазерного сканера, содержит большое количество избыточной или
3.Фильтрация
облако точек, полученное с помощью лазерного сканера, содержит большое количество избыточной или
Слайд 45 При фильтрации:
понижается плотность, убирая повторные точки в облаке;
убираются шумовые «вылетевшие»
При фильтрации:
понижается плотность, убирая повторные точки в облаке;
убираются шумовые «вылетевшие»
Слайд 46Пример прореженного облака точек.
Пример прореженного облака точек.
Слайд 474. Классификация точек
Проводится в 2 основных этапа:
Выделение точек земли.
Классификация других
4. Классификация точек
Проводится в 2 основных этапа:
Выделение точек земли.
Классификация других
Слайд 48Классификация растительности
Классификация выделение крыш
Классификация растительности
Классификация выделение крыш

Слайд 49Лазерное сканирование 1
Лазерное сканирование 1
Слайд 505. Создание поверхностей
На данном этапе необходимо представить “облака” точек математически
5. Создание поверхностей
На данном этапе необходимо представить “облака” точек математически
Слайд 51оло
оло
Слайд 52Созданные подобным образом поверхности, могут быть экспортированы в любые CAD и 3D-приложения.
Созданные подобным образом поверхности, могут быть экспортированы в любые CAD и 3D-приложения.
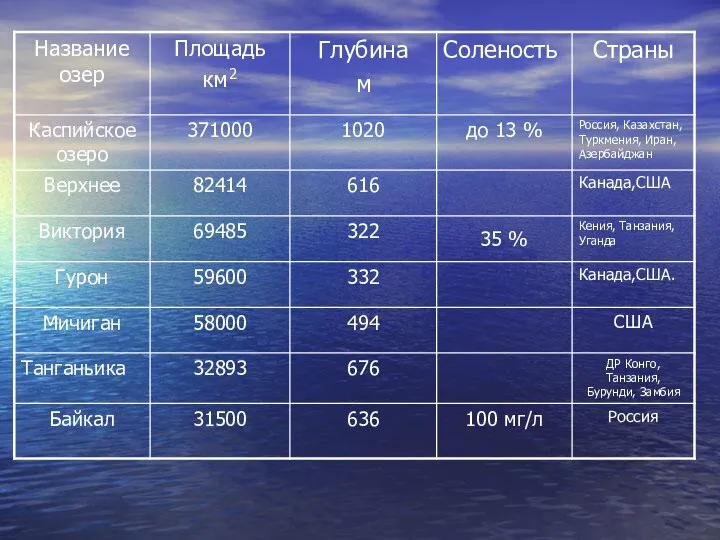 Характеристика озер
Характеристика озер Игра Воздушный океан
Игра Воздушный океан Презентация на тему Лесной комплекс России
Презентация на тему Лесной комплекс России  Мировой_океан
Мировой_океан Сербия
Сербия Концепция нового проекта в г. Липецке
Концепция нового проекта в г. Липецке Як пов'язані історія і простір
Як пов'язані історія і простір Пещеры Башкортостана
Пещеры Башкортостана Путешествие по старому городу - Тверь
Путешествие по старому городу - Тверь Выветривание горных пород, формирование россыпных месторождений золота
Выветривание горных пород, формирование россыпных месторождений золота Die deutschen Bundesländer
Die deutschen Bundesländer Республика Коми
Республика Коми Природа неньки-України
Природа неньки-України Демография России
Демография России Рельеф Земли. Горы
Рельеф Земли. Горы Оконная динамика таежных лесов. Браконьерство
Оконная динамика таежных лесов. Браконьерство Страны Южной Африки
Страны Южной Африки Шаблон игры Географическая азбука
Шаблон игры Географическая азбука ВГО 5 кл
ВГО 5 кл Путешествие по карте мира
Путешествие по карте мира Презентация на тему Гидросфера и ее части
Презентация на тему Гидросфера и ее части  О достопримечательностях родного уральского края
О достопримечательностях родного уральского края Ураганы. Причина ураганов
Ураганы. Причина ураганов Европейский Север
Европейский Север Особенности рельефа России
Особенности рельефа России Географическое положение, административно-территориальное деление страны. Население. Язык. Государственная символика
Географическое положение, административно-территориальное деление страны. Население. Язык. Государственная символика Карта владений Альфонса Фомича Поклевского-Козелл
Карта владений Альфонса Фомича Поклевского-Козелл Лес - природное сообщество. Смешанные леса
Лес - природное сообщество. Смешанные леса