- ЧПУ-УЧПУ-СЧПУ

Содержание
- 2. Числовое программное управление (ЧПУ) станком — управление обработкой заготовки на станке по УП, в которой данные
- 3. • Станки с ЧПУ стремительно внедряются в производственную сферу Теоретически любой станок с ручным управлением может
- 4. Подсистема управления Сердцем подсистемы управлении является контроллер (процессор), который обычно расположен в корпусе стойки ЧПУ. Системы
- 5. так и открытыми, ПК - совместимыми
- 6. 2. Подсистема приводов Подсистема приводов включает в себя различные двигатели и винтовые передачи для окончательного выполнения
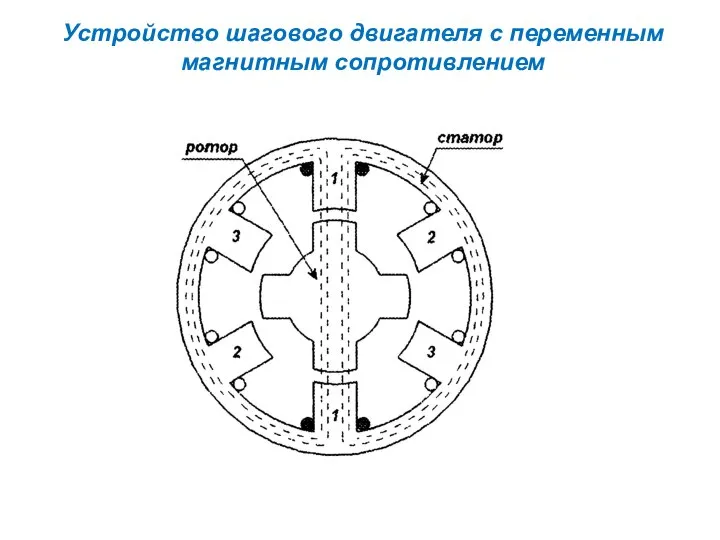
- 7. Устройство шагового двигателя с переменным магнитным сопротивлением
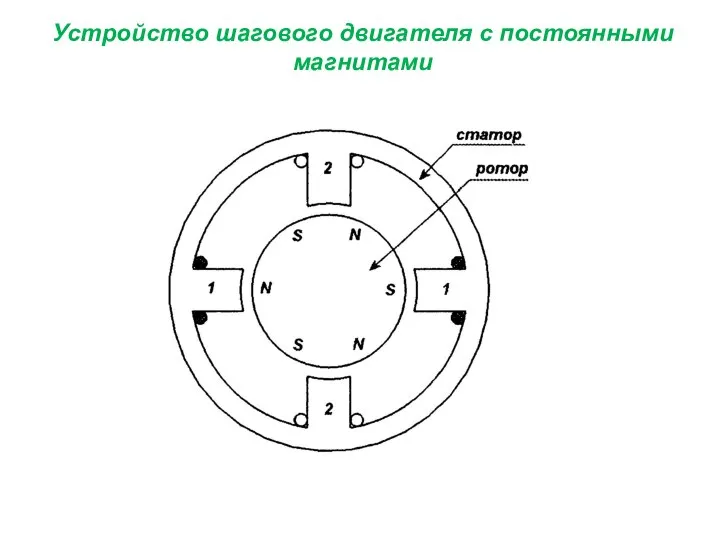
- 8. Устройство шагового двигателя с постоянными магнитами
- 9. Когда подсистема управления посылает шаговому двигателю электрический импульс, то происходит поворот на определенный угол, который зависит
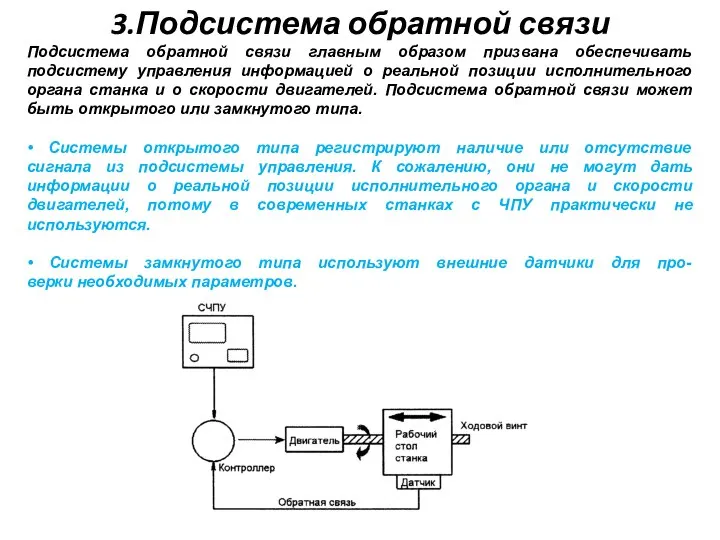
- 10. 3.Подсистема обратной связи Подсистема обратной связи главным образом призвана обеспечивать подсистему управления информацией о реальной позиции
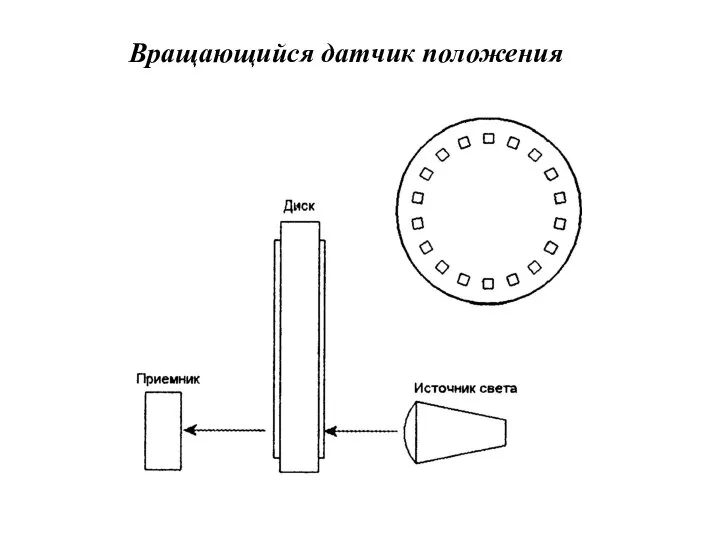
- 11. Вращающийся датчик положения
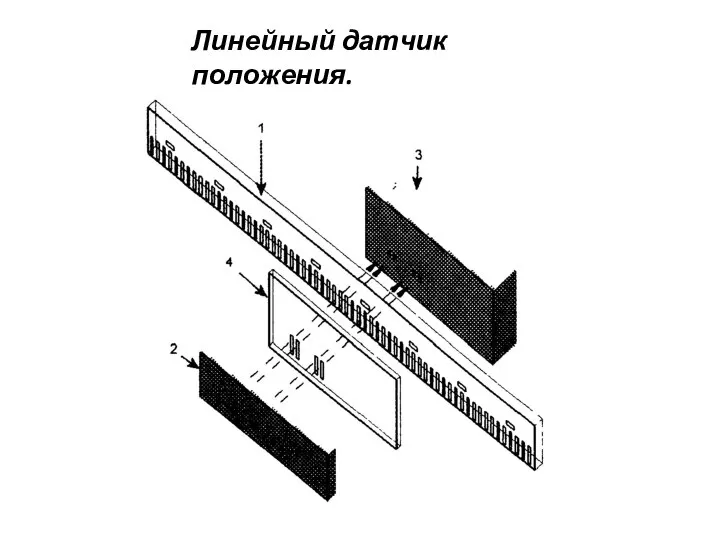
- 12. Линейный датчик положения.
- 13. Датчики состояния исполнительных органов: Температурные датчики (термопары) Инфракрасные датчики
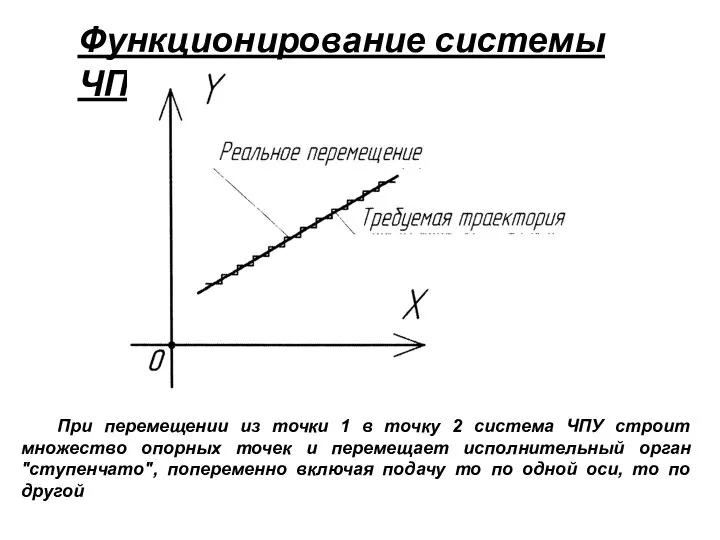
- 14. Функционирование системы ЧПУ При перемещении из точки 1 в точку 2 система ЧПУ строит множество опорных
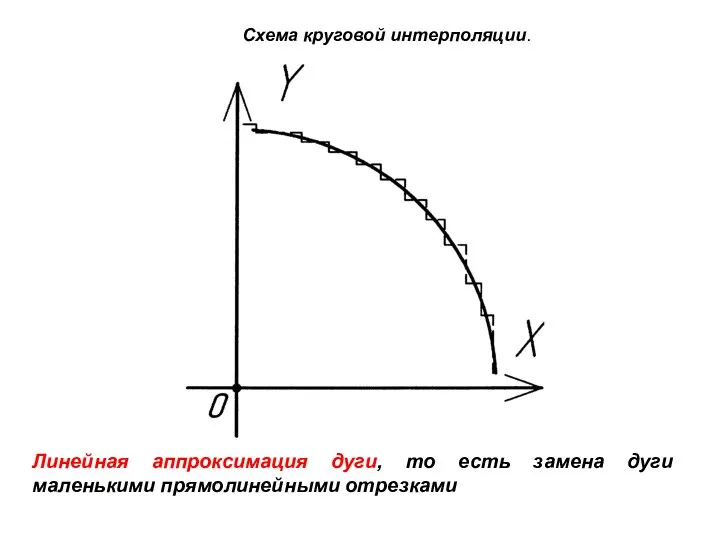
- 15. Схема круговой интерполяции. Линейная аппроксимация дуги, то есть замена дуги маленькими прямолинейными отрезками
- 17. Скачать презентацию
Слайд 3• Станки с ЧПУ стремительно внедряются в производственную сферу Теоретически любой станок
• Станки с ЧПУ стремительно внедряются в производственную сферу Теоретически любой станок
Слайд 4Подсистема управления
Сердцем подсистемы управлении является контроллер (процессор), который обычно расположен в
Подсистема управления
Сердцем подсистемы управлении является контроллер (процессор), который обычно расположен в

Слайд 5так и открытыми, ПК - совместимыми
так и открытыми, ПК - совместимыми

Слайд 62. Подсистема приводов
Подсистема приводов включает в себя различные двигатели и винтовые
2. Подсистема приводов
Подсистема приводов включает в себя различные двигатели и винтовые
Слайд 7Устройство шагового двигателя с переменным магнитным сопротивлением
Устройство шагового двигателя с переменным магнитным сопротивлением
Слайд 8Устройство шагового двигателя с постоянными магнитами
Устройство шагового двигателя с постоянными магнитами
Слайд 9Когда подсистема управления посылает шаговому двигателю электрический импульс, то происходит поворот на
Когда подсистема управления посылает шаговому двигателю электрический импульс, то происходит поворот на
Слайд 103.Подсистема обратной связи
Подсистема обратной связи главным образом призвана обеспечивать
подсистему управления информацией
3.Подсистема обратной связи
Подсистема обратной связи главным образом призвана обеспечивать
подсистему управления информацией
Слайд 11Вращающийся датчик положения
Вращающийся датчик положения
Слайд 12Линейный датчик положения.
Линейный датчик положения.
Слайд 13Датчики состояния исполнительных органов:
Температурные датчики (термопары)
Инфракрасные датчики
Датчики состояния исполнительных органов:
Температурные датчики (термопары)
Инфракрасные датчики
Слайд 14Функционирование системы ЧПУ
При перемещении из точки 1 в точку 2 система
Функционирование системы ЧПУ
При перемещении из точки 1 в точку 2 система
Слайд 15Схема круговой интерполяции.
Линейная аппроксимация дуги, то есть замена дуги маленькими прямолинейными
Схема круговой интерполяции.
Линейная аппроксимация дуги, то есть замена дуги маленькими прямолинейными
 Векторная графика. Задания
Векторная графика. Задания DNS
DNS Моменты, на которые нужно обратить внимание при реализации ДЗ
Моменты, на которые нужно обратить внимание при реализации ДЗ Самостоятельная работа ИКТ
Самостоятельная работа ИКТ Классификация программного обеспечения (ПО)
Классификация программного обеспечения (ПО) Виртуальная реабилитация и фитнес. Работники
Виртуальная реабилитация и фитнес. Работники Символьный (литерный) тип
Символьный (литерный) тип Информационно-аналитическая система SCIENCE INDEX для авторов. Научная электронная библиотека eLIBRARY.RU
Информационно-аналитическая система SCIENCE INDEX для авторов. Научная электронная библиотека eLIBRARY.RU Remote method invocation in Java
Remote method invocation in Java Циклы (занятие №3)
Циклы (занятие №3) Диаграммы деятельности
Диаграммы деятельности Аналитика в геймдизайне
Аналитика в геймдизайне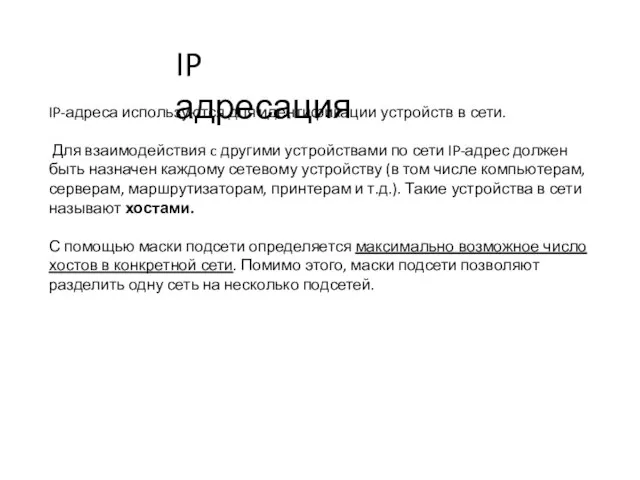 IP адресация
IP адресация Продуктовая матрица. Занятие №8 Основатель
Продуктовая матрица. Занятие №8 Основатель Указатели и массивы
Указатели и массивы Средство подготовки презентации Microsoft PowerPaint
Средство подготовки презентации Microsoft PowerPaint Программное управление исполнителями
Программное управление исполнителями Работа в онлайн сервисе графического дизайна Canva
Работа в онлайн сервисе графического дизайна Canva Учебный центр Digital gate
Учебный центр Digital gate Процесс управления. Основные понятия и базовые концепции
Процесс управления. Основные понятия и базовые концепции Typescript
Typescript Организация и обработка файловых структур
Организация и обработка файловых структур Нумерация договоров и заказов в рамках ТО АМС
Нумерация договоров и заказов в рамках ТО АМС УЦ УГМК-Холдинг
УЦ УГМК-Холдинг Как сохранить сертификат участника в онлайн-викторине Моя Родина - Россия
Как сохранить сертификат участника в онлайн-викторине Моя Родина - Россия SMM – Social Media Marketing
SMM – Social Media Marketing Проектирование, создание и использование баз данных. 9 класс
Проектирование, создание и использование баз данных. 9 класс Алгоритм удаления невидимых линий
Алгоритм удаления невидимых линий