- Method for planning the trajectories of mobile objects in conditions of uncertainty

Содержание
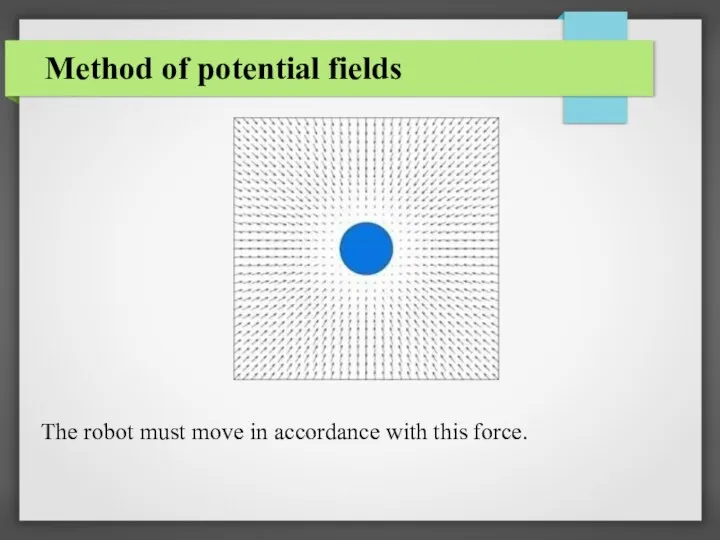
- 2. Method of potential fields The robot must move in accordance with this force.
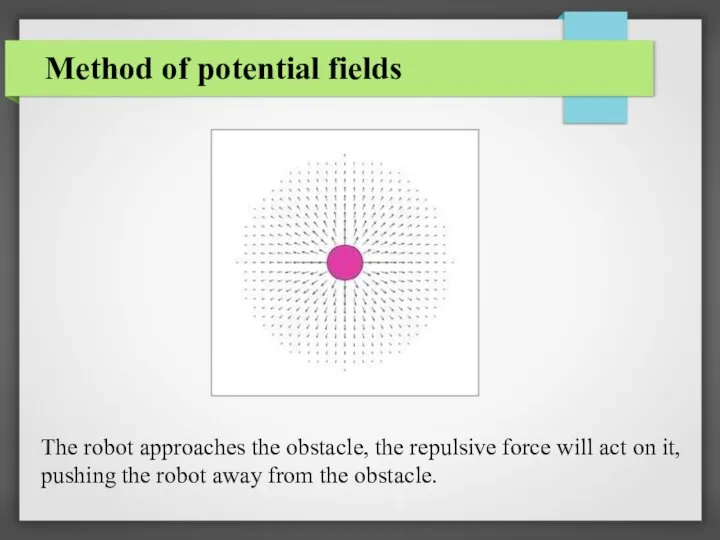
- 3. Method of potential fields The robot approaches the obstacle, the repulsive force will act on it,
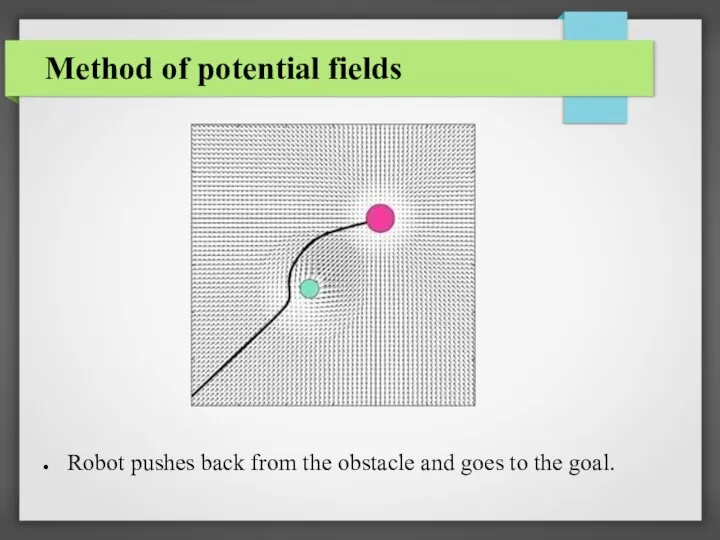
- 4. Method of potential fields Robot pushes back from the obstacle and goes to the goal.
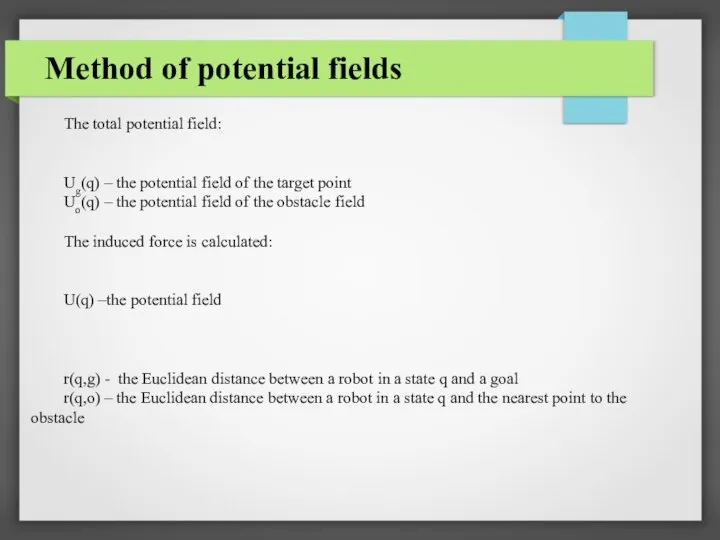
- 5. Method of potential fields The total potential field: Ug(q) – the potential field of the target
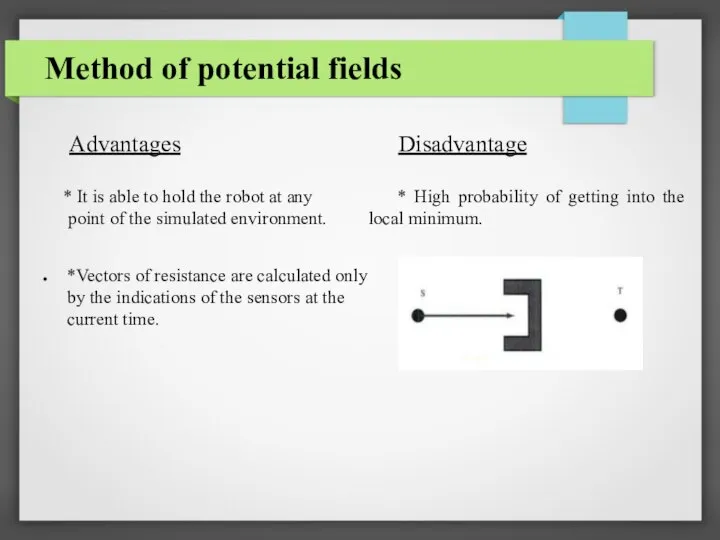
- 6. Method of potential fields Advantages * It is able to hold the robot at any point
- 8. Скачать презентацию
Слайд 3 Method of potential fields
The robot approaches the obstacle, the repulsive force
Method of potential fields
The robot approaches the obstacle, the repulsive force
Слайд 4 Method of potential fields
Robot pushes back from the obstacle and goes
Method of potential fields
Robot pushes back from the obstacle and goes
Слайд 5 Method of potential fields
The total potential field:
Ug(q) – the potential field
Method of potential fields
The total potential field:
Ug(q) – the potential field
Слайд 6 Method of potential fields
Advantages
* It is able to hold
Method of potential fields
Advantages
* It is able to hold
 Power BI Introduction to Power BI
Power BI Introduction to Power BI Разбор задач ЕГЭ. Определение скорости передачи информации. В10
Разбор задач ЕГЭ. Определение скорости передачи информации. В10 Точки и вектора. Геометрия
Точки и вектора. Геометрия Лаборатория программирования и баз данных
Лаборатория программирования и баз данных Основы программирования. История и современное состояние
Основы программирования. История и современное состояние Структура новостей
Структура новостей 3D принтер для строительства домов как шаг в будущее
3D принтер для строительства домов как шаг в будущее transportnye_seti
transportnye_seti 2.1. FIORI Навигация
2.1. FIORI Навигация Матрица смежности. Анализ информационных моделей
Матрица смежности. Анализ информационных моделей 10u-5_ÐамÑÑÑ_33
10u-5_ÐамÑÑÑ_33 Как создать конференцию в ZOOM
Как создать конференцию в ZOOM Применение диагностических программ общего и специального назначения для выявления неисправности ПК
Применение диагностических программ общего и специального назначения для выявления неисправности ПК Двухдневный интенсив по разработке на языке Python. День 1. Первое знакомство с языком Python
Двухдневный интенсив по разработке на языке Python. День 1. Первое знакомство с языком Python HTML+CSS. Анимация текста. Урок 4
HTML+CSS. Анимация текста. Урок 4 Виды интерфейсов. Понятие программного интерфейса, его назначение. Интерфейс пользователя. (Лекция 3)
Виды интерфейсов. Понятие программного интерфейса, его назначение. Интерфейс пользователя. (Лекция 3) Как зарегистрироваться на образовательной платформе
Как зарегистрироваться на образовательной платформе Интерпретация уравнения регрессии
Интерпретация уравнения регрессии Системные процессы Windows
Системные процессы Windows Объектно-ориентированное программирование в С++
Объектно-ориентированное программирование в С++ Общие сведения о языке программирования паскаль. Начала программирования
Общие сведения о языке программирования паскаль. Начала программирования Алгоритмы. Алгоритмизация юридической деятельности
Алгоритмы. Алгоритмизация юридической деятельности Диаметр, радиус и центр графа
Диаметр, радиус и центр графа Условный оператор. { Решение задач
Условный оператор. { Решение задач Подсчёт количества программ. Задание
Подсчёт количества программ. Задание Помощник туриста на iOS
Помощник туриста на iOS Безопасность в сети интернет
Безопасность в сети интернет Валидация данных
Валидация данных