- Как развивалась робототехника

Содержание
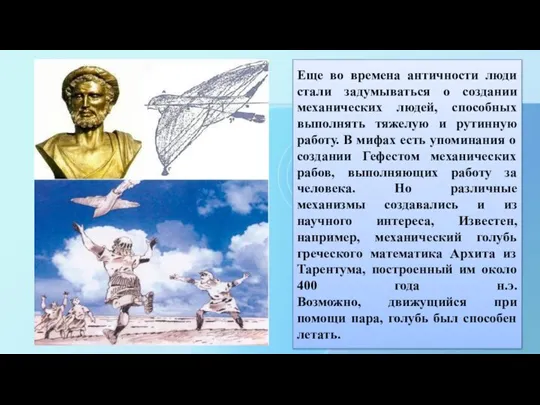
- 2. Еще во времена античности люди стали задумываться о создании механических людей, способных выполнять тяжелую и рутинную
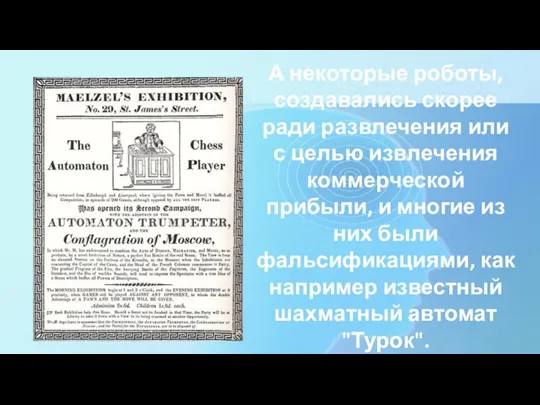
- 3. А некоторые роботы, создавались скорее ради развлечения или с целью извлечения коммерческой прибыли, и многие из
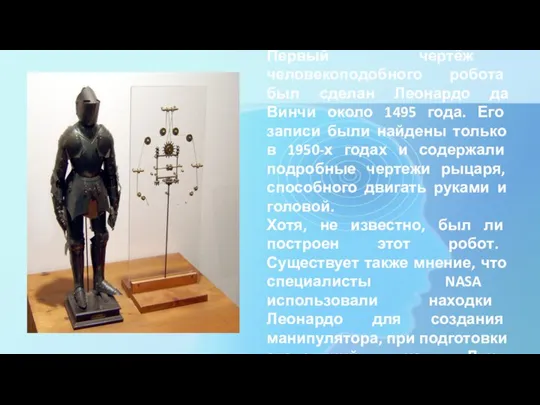
- 4. Первый чертёж человекоподобного робота был сделан Леонардо да Винчи около 1495 года. Его записи были найдены
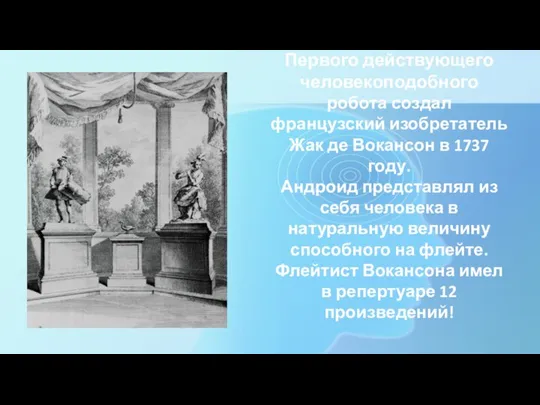
- 5. Первого действующего человекоподобного робота создал французский изобретатель Жак де Вокансон в 1737 году. Андроид представлял из
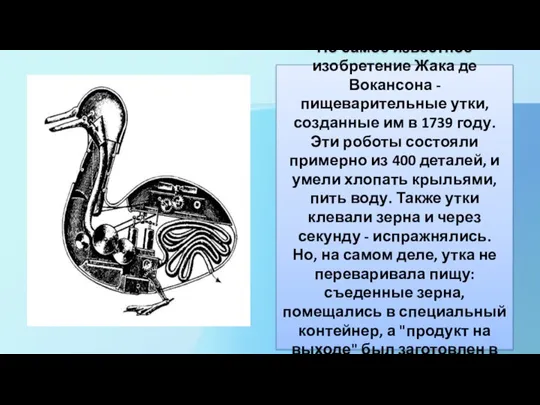
- 6. Но самое известное изобретение Жака де Вокансона - пищеварительные утки, созданные им в 1739 году. Эти
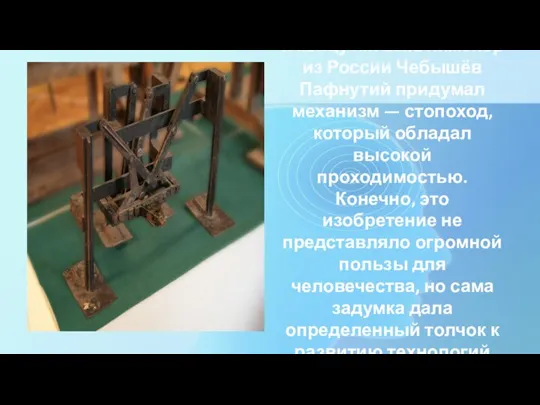
- 7. К концу XIX века инженер из России Чебышёв Пафнутий придумал механизм — стопоход, который обладал высокой
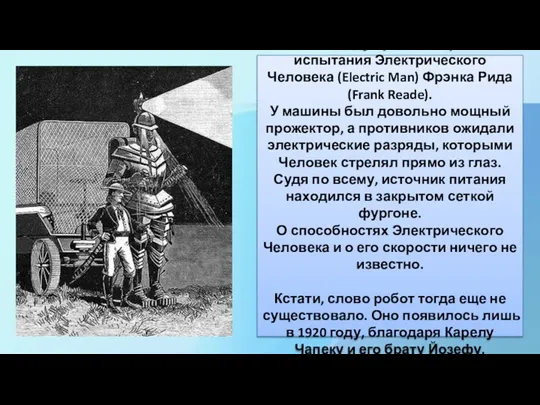
- 8. В 1885 году прошли первые испытания Электрического Человека (Electric Man) Фрэнка Рида (Frank Reade). У машины
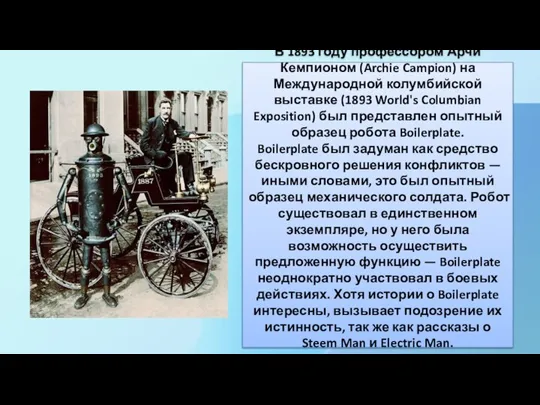
- 9. В 1893 году профессором Арчи Кемпионом (Archie Campion) на Международной колумбийской выставке (1893 World's Columbian Exposition)
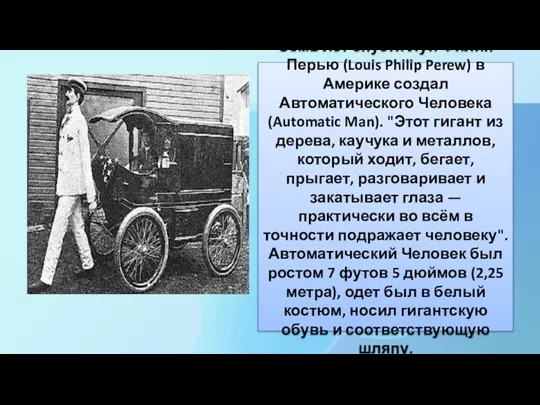
- 10. Семь лет спустя Луи Филип Перью (Louis Philip Perew) в Америке создал Автоматического Человека (Automatic Man).
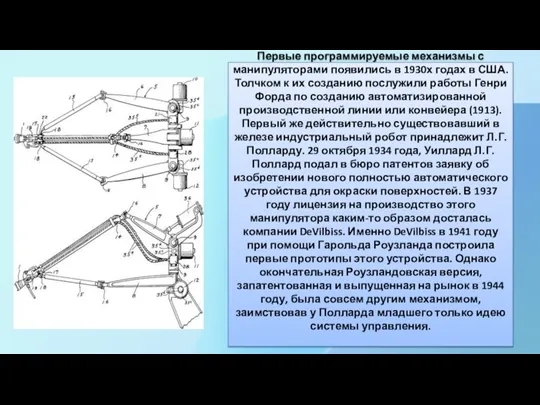
- 11. Первые программируемые механизмы с манипуляторами появились в 1930х годах в США. Толчком к их созданию послужили
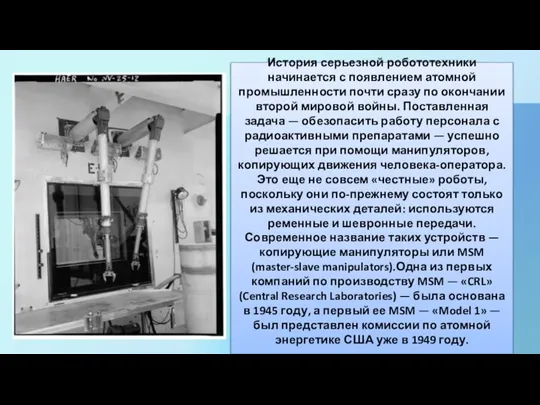
- 12. История серьезной робототехники начинается с появлением атомной промышленности почти сразу по окончании второй мировой войны. Поставленная
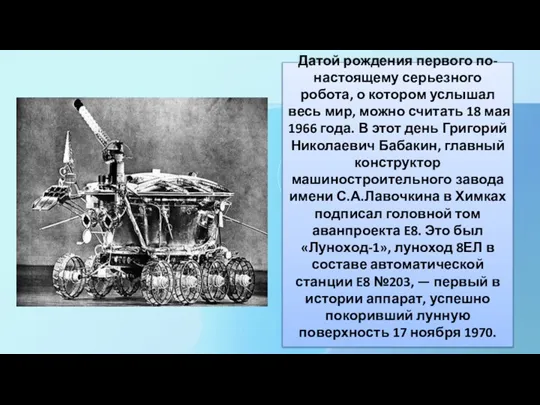
- 13. Датой рождения первого по-настоящему серьезного робота, о котором услышал весь мир, можно считать 18 мая 1966
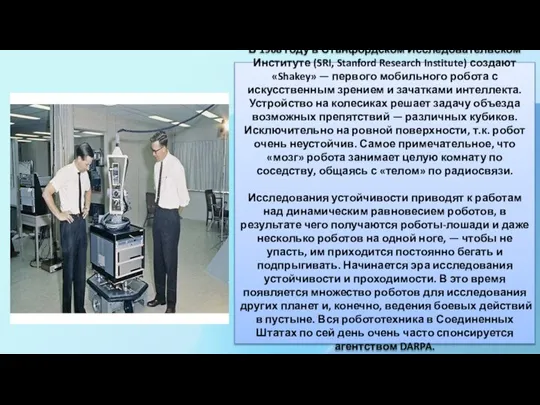
- 14. В 1968 году в Станфордском Исследовательском Институте (SRI, Stanford Research Institute) создают «Shakey» — первого мобильного
- 16. Скачать презентацию
Слайд 3
А некоторые роботы, создавались скорее ради развлечения или с целью извлечения коммерческой
А некоторые роботы, создавались скорее ради развлечения или с целью извлечения коммерческой
Слайд 4
Первый чертёж человекоподобного робота был сделан Леонардо да Винчи около 1495 года.
Первый чертёж человекоподобного робота был сделан Леонардо да Винчи около 1495 года.
Слайд 5Первого действующего человекоподобного робота создал французский изобретатель Жак де Вокансон в 1737
Первого действующего человекоподобного робота создал французский изобретатель Жак де Вокансон в 1737
Слайд 6
Но самое известное изобретение Жака де Вокансона - пищеварительные утки, созданные им
Но самое известное изобретение Жака де Вокансона - пищеварительные утки, созданные им
Слайд 7
К концу XIX века инженер из России Чебышёв Пафнутий придумал механизм —
К концу XIX века инженер из России Чебышёв Пафнутий придумал механизм —
Слайд 8
В 1885 году прошли первые испытания Электрического Человека (Electric Man) Фрэнка Рида
В 1885 году прошли первые испытания Электрического Человека (Electric Man) Фрэнка Рида
Слайд 9В 1893 году профессором Арчи Кемпионом (Archie Campion) на Международной колумбийской выставке
В 1893 году профессором Арчи Кемпионом (Archie Campion) на Международной колумбийской выставке
Слайд 10
Семь лет спустя Луи Филип Перью (Louis Philip Perew) в Америке создал
Семь лет спустя Луи Филип Перью (Louis Philip Perew) в Америке создал
Слайд 11Первые программируемые механизмы с манипуляторами появились в 1930х годах в США. Толчком
Первые программируемые механизмы с манипуляторами появились в 1930х годах в США. Толчком
Слайд 12История серьезной робототехники начинается с появлением атомной промышленности почти сразу по окончании
История серьезной робототехники начинается с появлением атомной промышленности почти сразу по окончании
Слайд 13
Датой рождения первого по-настоящему серьезного робота, о котором услышал весь мир, можно
Датой рождения первого по-настоящему серьезного робота, о котором услышал весь мир, можно
Слайд 14
В 1968 году в Станфордском Исследовательском Институте (SRI, Stanford Research Institute) создают
В 1968 году в Станфордском Исследовательском Институте (SRI, Stanford Research Institute) создают
 Афинская и спартанская система воспитания
Афинская и спартанская система воспитания Презентация на тему Русь в правление Ивана Грозного (1533-1584) 10 класс
Презентация на тему Русь в правление Ивана Грозного (1533-1584) 10 класс  Музей-панормам Бородинская битва
Музей-панормам Бородинская битва Революция 1917 года в зеркале российской истории, культуры и искусства
Революция 1917 года в зеркале российской истории, культуры и искусства Borbon (II parte. 1874-1927)
Borbon (II parte. 1874-1927) Формирование индустриального общества в ведущих государствах европы и сша в хіх – начале хх вв
Формирование индустриального общества в ведущих государствах европы и сша в хіх – начале хх вв История Петра 1
История Петра 1 Дмитриев Степан Александрович
Дмитриев Степан Александрович Музей кораблей викингов в Осло
Музей кораблей викингов в Осло Опричная политика Ивана Грозного: современные дискуссии
Опричная политика Ивана Грозного: современные дискуссии Главные документы Великой Отечественной войны
Главные документы Великой Отечественной войны Екатерина II и её фавориты
Екатерина II и её фавориты Воин. Учитель. Гражданин
Воин. Учитель. Гражданин Почетные граждане города Саратова
Почетные граждане города Саратова Я помню! Я горжусь!
Я помню! Я горжусь! 9 мая. 1941-1945 гг
9 мая. 1941-1945 гг Бессмертный полк. Я помню, я горжусь
Бессмертный полк. Я помню, я горжусь 22 июня 1941 года в 4 часа утра началась Великая Отечественная война
22 июня 1941 года в 4 часа утра началась Великая Отечественная война Культурно-познавательный экскурсионный маршрут Дорогами города Углегорска. День 2
Культурно-познавательный экскурсионный маршрут Дорогами города Углегорска. День 2 Начало политической раздробленности на Руси
Начало политической раздробленности на Руси Отечественная война 1812
Отечественная война 1812 Поход Степана Тимофеевича Разина
Поход Степана Тимофеевича Разина Памятные даты ВОВ
Памятные даты ВОВ История создания Вооруженных Сил Российской Федерации
История создания Вооруженных Сил Российской Федерации Революция в Англии, в XVII веке
Революция в Англии, в XVII веке Герои ВОВ – наши земляки, их имена увековечены в названиях улиц г. Читы
Герои ВОВ – наши земляки, их имена увековечены в названиях улиц г. Читы Уроженцы Атяшевского района,награжденные медалью Ушакова
Уроженцы Атяшевского района,награжденные медалью Ушакова Презентация славянская мифология
Презентация славянская мифология