Московский государственный университет геодезии и картографии Московский государственный университет геодезии и картографи
- Московский государственный университет геодезии и картографии Московский государственный университет геодезии и картографи

Содержание
- 2. Студенты ФПКиФ 2-4: Барбасов В. К. Гаврюшин Н.М. Батаев М.С. Научный руководитель: проф. Алтынов Александр Ефимович.
- 3. Аннотация. В данной работе рассмотрены возможности мультироторных БПЛА и способы их применения в крупномасштабном мониторинге местности
- 4. БПЛА мультироторного типа (Гексалет)
- 5. Беспилотный летательный аппарат - летательный аппарат без экипажа на борту, использующий аэродинамический принцип создания подъемной силы
- 6. Классификация БПЛА в РФ включает следующие категории (классы):
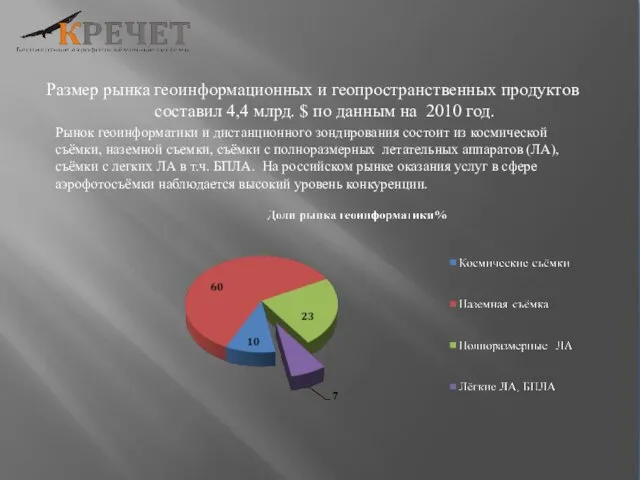
- 7. Размер рынка геоинформационных и геопространственных продуктов составил 4,4 млрд. $ по данным на 2010 год. Рынок
- 8. Данный БПЛА представляет собой радиоуправляемую летающую платформу на которой установлено от 3 - 16 бесколлекторных двигателей
- 9. ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ: Полетный вес: 1.5 кг Диаметр: 85 см Тяга: 6x850 грамм Длительность полета: 25 минут
- 10. РЕЖИМЫ ПОЛЕТА Ручной (без стабилизации) Ручной (со стабилизацией) Удержание высоты Удержание позиции Круговой облет вокруг точки
- 11. Рассмотрим “+” применения мультироторного БПЛА для целей аэрофотосъемки: Возможность снимков с малых и очень малых высот,
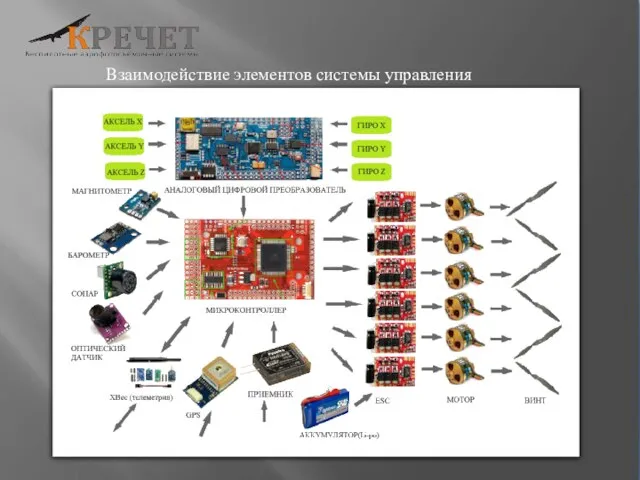
- 12. Взаимодействие элементов системы управления
- 13. Каналы взаимодействия мультироторного БПЛА с наземной станцией Пульт управления Наземный модуль телеметрии Электронная начинка БПЛА Видеоочки
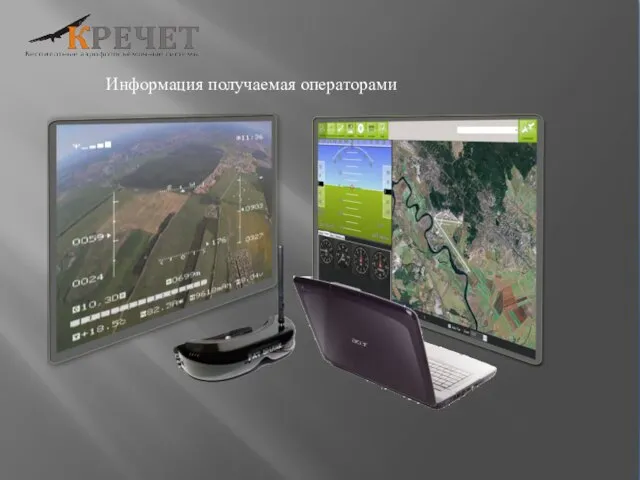
- 14. Информация получаемая операторами
- 15. Сравнение БПЛА, вертолетов и мультироторных. Мультироторный: Более стабилен (хотя это в немалой степени зависит от электроники
- 16. Способы использования мультироторного БПЛА в задачах мониторинга окружающей среды: Картографический мониторинг Топографическая съемка Многозоональная съемка Тепловизионная
- 17. Для целей картографического мониторинга мультироторный БПЛА должен рассматриваться в совокупности с его приборным оснащением и полезной
- 18. К полезной нагрузке для задач БПЛА могут относится: - цифровая фотокамера (видеокамера) -тепловизор -ИК-камера - радиолакационное
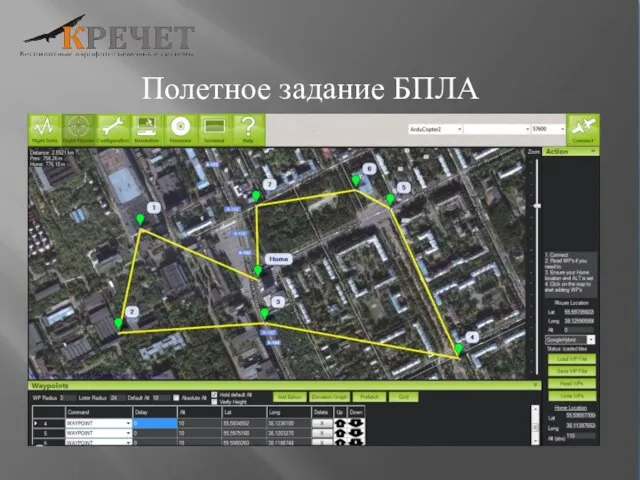
- 19. Полетное задание БПЛА
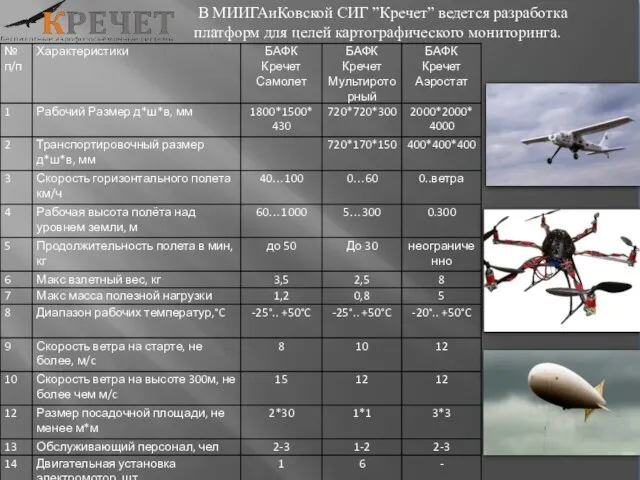
- 20. В МИИГАиКовской СИГ ”Кречет” ведется разработка платформ для целей картографического мониторинга.
- 21. Существующие разновидности:
- 22. Существующие разновидности:
- 23. Фотка красивая такая Фото мультироторного БПЛА разработанного в СИГ «КРЕЧЕТ»
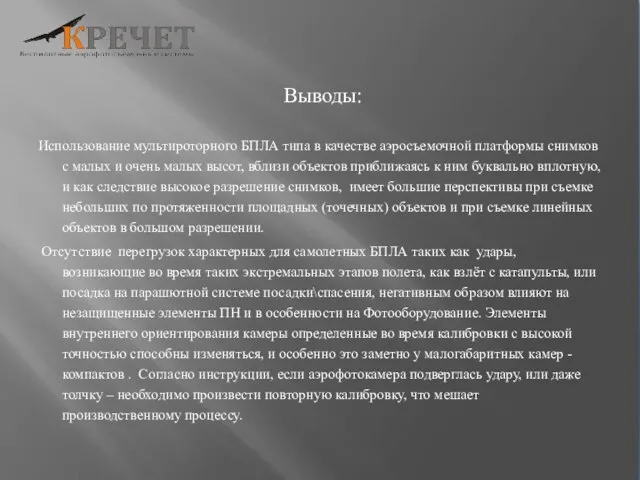
- 24. Выводы: Использование мультироторного БПЛА типа в качестве аэросъемочной платформы снимков с малых и очень малых высот,
- 25. Возможности мультироторных БПЛА. - в зависимости от решаемых задач аппарат может иметь конфигурацию от 3-х до
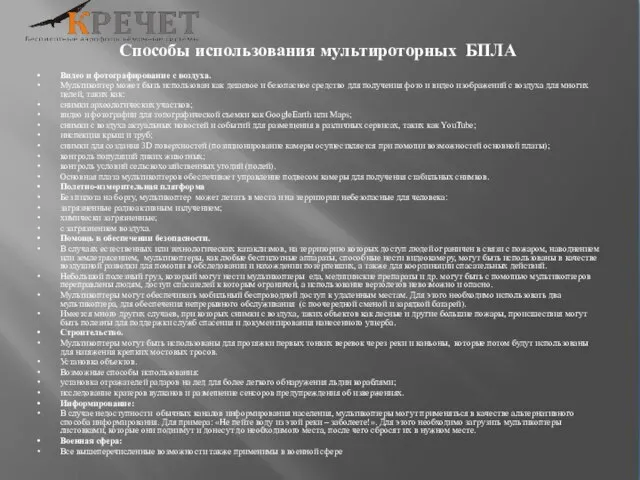
- 26. Способы использования мультироторных БПЛА Видео и фотографирование с воздуха. Мультикоптер может быть использован как дешевое и
- 28. Скачать презентацию
Слайд 2Студенты ФПКиФ 2-4:
Барбасов В. К.
Гаврюшин Н.М. Батаев М.С.
Научный руководитель:
проф. Алтынов
Студенты ФПКиФ 2-4:
Барбасов В. К.
Гаврюшин Н.М. Батаев М.С.
Научный руководитель:
проф. Алтынов
Слайд 3Аннотация. В данной работе рассмотрены возможности мультироторных БПЛА и способы их применения
Аннотация. В данной работе рассмотрены возможности мультироторных БПЛА и способы их применения
Слайд 4БПЛА мультироторного типа
(Гексалет)
БПЛА мультироторного типа
(Гексалет)

Слайд 5Беспилотный летательный аппарат - летательный аппарат без экипажа на борту, использующий аэродинамический
Беспилотный летательный аппарат - летательный аппарат без экипажа на борту, использующий аэродинамический

Слайд 6 Классификация БПЛА в РФ включает следующие категории (классы):
Классификация БПЛА в РФ включает следующие категории (классы):

Слайд 7Размер рынка геоинформационных и геопространственных продуктов составил 4,4 млрд. $ по данным
Размер рынка геоинформационных и геопространственных продуктов составил 4,4 млрд. $ по данным
Слайд 8 Данный БПЛА представляет собой радиоуправляемую летающую платформу на которой установлено от
Данный БПЛА представляет собой радиоуправляемую летающую платформу на которой установлено от

Слайд 9ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ:
Полетный вес: 1.5 кг
Диаметр: 85 см
Тяга: 6x850 грамм
Длительность полета: 25
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ:
Полетный вес: 1.5 кг
Диаметр: 85 см
Тяга: 6x850 грамм
Длительность полета: 25

Слайд 10РЕЖИМЫ ПОЛЕТА
Ручной (без стабилизации)
Ручной (со стабилизацией)
Удержание высоты
Удержание позиции
Круговой облет вокруг точки
Полет в
РЕЖИМЫ ПОЛЕТА
Ручной (без стабилизации)
Ручной (со стабилизацией)
Удержание высоты
Удержание позиции
Круговой облет вокруг точки
Полет в
Слайд 11Рассмотрим “+” применения мультироторного БПЛА для целей аэрофотосъемки:
Возможность снимков с малых и
Рассмотрим “+” применения мультироторного БПЛА для целей аэрофотосъемки:
Возможность снимков с малых и
Слайд 12
Взаимодействие элементов системы управления
Взаимодействие элементов системы управления
Слайд 13Каналы взаимодействия мультироторного БПЛА
с наземной станцией
Пульт управления
Наземный модуль телеметрии
Электронная начинка БПЛА
Видеоочки
Каналы взаимодействия мультироторного БПЛА
с наземной станцией
Пульт управления
Наземный модуль телеметрии
Электронная начинка БПЛА
Видеоочки

Слайд 14Информация получаемая операторами
Информация получаемая операторами
Слайд 15Сравнение БПЛА, вертолетов и мультироторных.
Мультироторный:
Более стабилен (хотя это в немалой
степени зависит
Сравнение БПЛА, вертолетов и мультироторных.
Мультироторный:
Более стабилен (хотя это в немалой
степени зависит

Слайд 16Способы использования мультироторного БПЛА в задачах мониторинга окружающей среды:
Картографический мониторинг
Топографическая съемка
Многозоональная съемка
Тепловизионная
Способы использования мультироторного БПЛА в задачах мониторинга окружающей среды:
Картографический мониторинг
Топографическая съемка
Многозоональная съемка
Тепловизионная
Слайд 17Для целей картографического мониторинга мультироторный БПЛА должен рассматриваться в совокупности с его
Для целей картографического мониторинга мультироторный БПЛА должен рассматриваться в совокупности с его

Слайд 18К полезной нагрузке для задач БПЛА могут относится:
- цифровая фотокамера (видеокамера)
-тепловизор
-ИК-камера
- радиолакационное
К полезной нагрузке для задач БПЛА могут относится:
- цифровая фотокамера (видеокамера)
-тепловизор
-ИК-камера
- радиолакационное

Слайд 19Полетное задание БПЛА
Полетное задание БПЛА
Слайд 20 В МИИГАиКовской СИГ ”Кречет” ведется разработка платформ для целей картографического мониторинга.
В МИИГАиКовской СИГ ”Кречет” ведется разработка платформ для целей картографического мониторинга.
Слайд 21Существующие разновидности:
Существующие разновидности:

Слайд 22Существующие разновидности:
Существующие разновидности:

Слайд 23Фотка красивая такая
Фото мультироторного БПЛА разработанного в СИГ «КРЕЧЕТ»
Фото мультироторного БПЛА разработанного в СИГ «КРЕЧЕТ»

Слайд 24Выводы:
Использование мультироторного БПЛА типа в качестве аэросъемочной платформы снимков с малых и
Выводы:
Использование мультироторного БПЛА типа в качестве аэросъемочной платформы снимков с малых и
Слайд 25Возможности мультироторных БПЛА.
- в зависимости от решаемых задач аппарат может иметь конфигурацию
Возможности мультироторных БПЛА.
- в зависимости от решаемых задач аппарат может иметь конфигурацию
Слайд 26Способы использования мультироторных БПЛА
Видео и фотографирование с воздуха.
Мультикоптер может быть использован как
Способы использования мультироторных БПЛА
Видео и фотографирование с воздуха.
Мультикоптер может быть использован как
 Аппликация Выполнила ученица 10 кл. Б Гимназии №21 Тропина Наталия
Аппликация Выполнила ученица 10 кл. Б Гимназии №21 Тропина Наталия Мимоза своими руками Рисунок. Аппликация. Разработка учителя начальных классов Лисицыной Е. А. ГБОУ Гимназии №227 Санкт-Петербурга
Мимоза своими руками Рисунок. Аппликация. Разработка учителя начальных классов Лисицыной Е. А. ГБОУ Гимназии №227 Санкт-Петербурга Мастер класс по изготовлению куклы – бибабо.
Мастер класс по изготовлению куклы – бибабо. Авторская разработка «Ажурный листик».
Авторская разработка «Ажурный листик». Презентация на тему Чай, история чая
Презентация на тему Чай, история чая  Презентация на тему Изготовление фоторамки
Презентация на тему Изготовление фоторамки  Презентация на тему Утюги: поможем выбрать
Презентация на тему Утюги: поможем выбрать  Рождественская звезда Творческая мастерская
Рождественская звезда Творческая мастерская Корзиночка для пасхального яичка
Корзиночка для пасхального яичка Презентация на тему Вязание
Презентация на тему Вязание  Презентация на тему Интарсия
Презентация на тему Интарсия  Презентация на тему Учимся лепить из пластилина
Презентация на тему Учимся лепить из пластилина  Раскрой платья Леоненко Марина Александровна учитель - технологии СКОШИ VIII вида г. Поронайск
Раскрой платья Леоненко Марина Александровна учитель - технологии СКОШИ VIII вида г. Поронайск Презентация на тему Лепка из пластилина. Яркая гусеница
Презентация на тему Лепка из пластилина. Яркая гусеница  Презентация на тему Вышивка крестом. Методы и виды вышивки крестом. Болгарский крест
Презентация на тему Вышивка крестом. Методы и виды вышивки крестом. Болгарский крест  Презентация на тему Открытка для мамы
Презентация на тему Открытка для мамы  Игрушки из ваты - презентация к уроку Технологии_
Игрушки из ваты - презентация к уроку Технологии_ Презентация на тему Юбка
Презентация на тему Юбка  Дом детского творчества «На реке Сестре» Курортный район г. Санкт-Петербург РУЧНЫЕ ШВЫ Методическая подборка Составитель Пед
Дом детского творчества «На реке Сестре» Курортный район г. Санкт-Петербург РУЧНЫЕ ШВЫ Методическая подборка Составитель Пед АППЛИКАЦИЯ СНЕГ ИДЁТ
АППЛИКАЦИЯ СНЕГ ИДЁТ Серебряный браслет
Серебряный браслет Презентация на тему Проект "Волшебные свойства бумаги"
Презентация на тему Проект "Волшебные свойства бумаги"  Презентация на тему Воздушный змей
Презентация на тему Воздушный змей  Презентация на тему Аппликация из геометрических фигур
Презентация на тему Аппликация из геометрических фигур  Презентация на тему: Подставка для вареного яйца
Презентация на тему: Подставка для вареного яйца Презентация на тему Аппликация из листьев
Презентация на тему Аппликация из листьев  Выставка работ по технологии в нашей школе. МОУОО «Новообинцевская средняя общеобразовательная школа» Учитель: Кавылина Н.В.
Выставка работ по технологии в нашей школе. МОУОО «Новообинцевская средняя общеобразовательная школа» Учитель: Кавылина Н.В. Методика работы над рисованием головы человека
Методика работы над рисованием головы человека