- Фильтры Колмогорова-Винера

Содержание
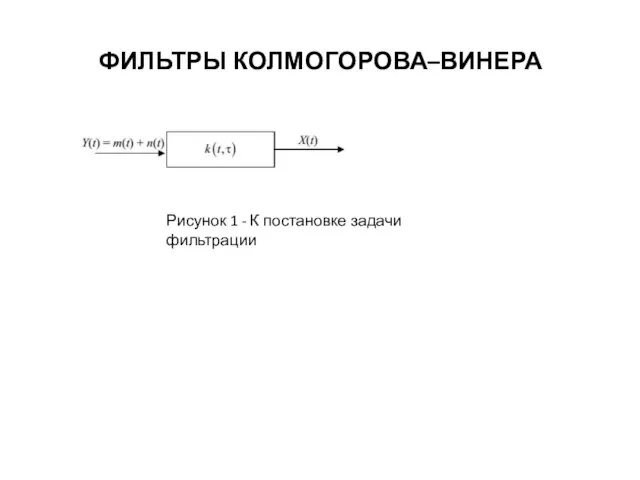
- 2. ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА Рисунок 1 - К постановке задачи фильтрации
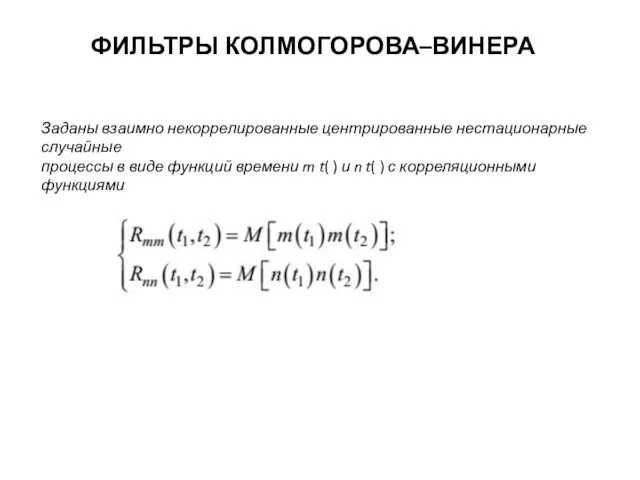
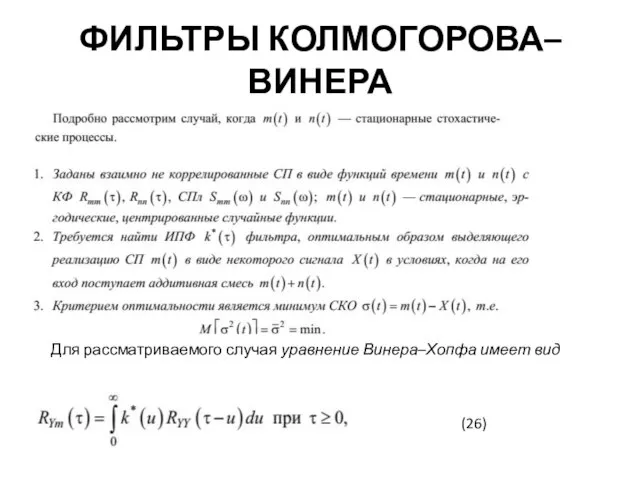
- 3. ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА Заданы взаимно некоррелированные центрированные нестационарные случайные процессы в виде функций времени m t( )
- 4. ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА Требуется найти ИПФ k( t*, τ) фильтра, оптимальным образом выделяющего реализацию случайного процесса m(t)
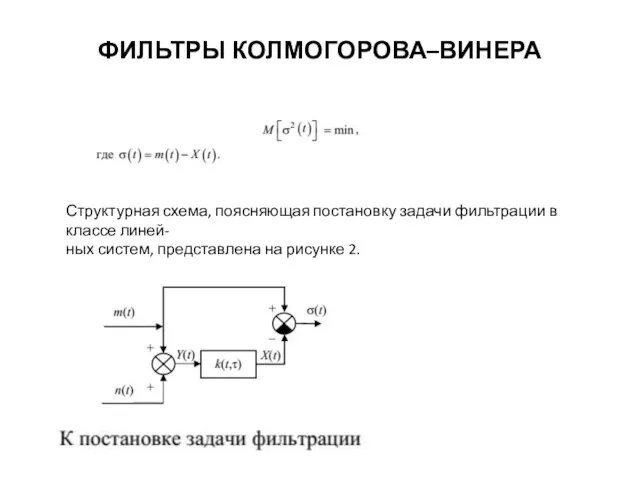
- 5. ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА Структурная схема, поясняющая постановку задачи фильтрации в классе линей- ных систем, представлена на рисунке
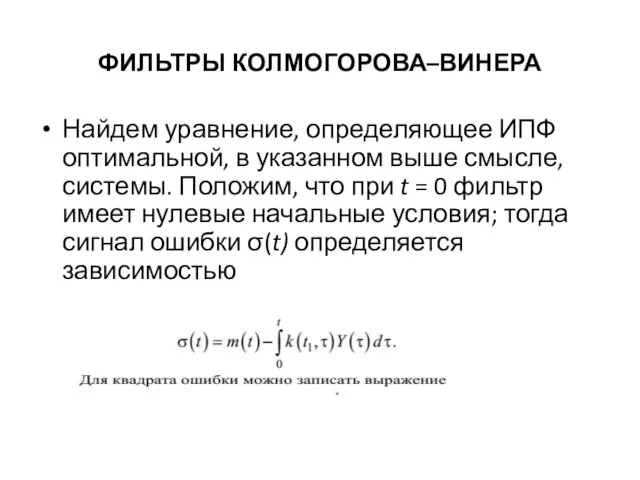
- 6. ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА Найдем уравнение, определяющее ИПФ оптимальной, в указанном выше смысле, системы. Положим, что при t
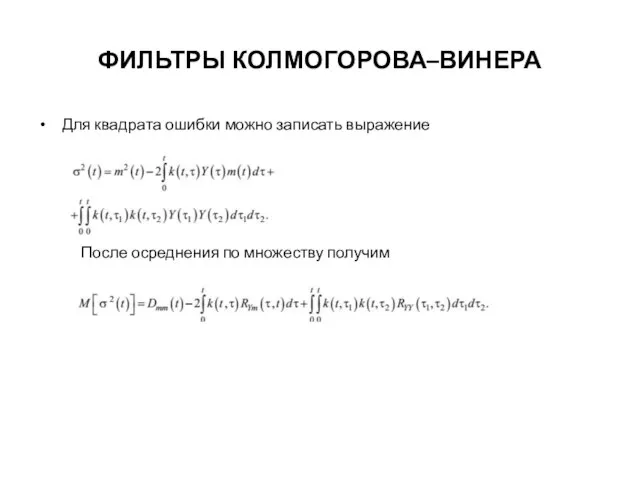
- 7. ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА После осреднения по множеству получим Для квадрата ошибки можно записать выражение
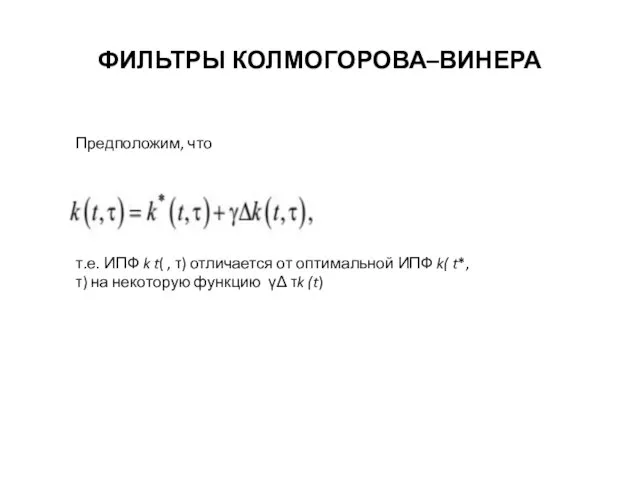
- 8. ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА Предположим, что т.е. ИПФ k t( , τ) отличается от оптимальной ИПФ k( t*,
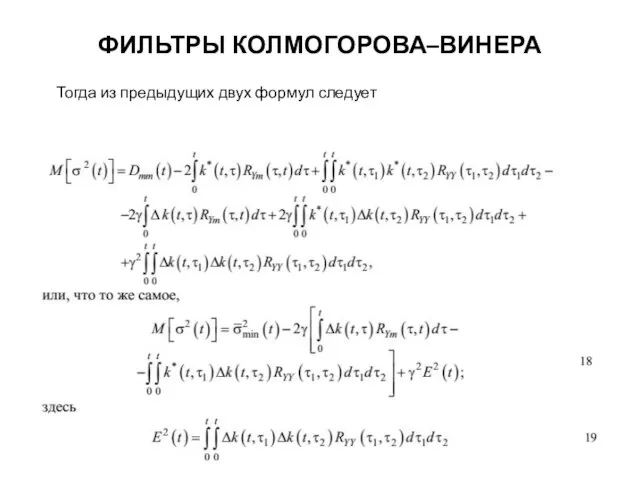
- 9. ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА Тогда из предыдущих двух формул следует
- 10. ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
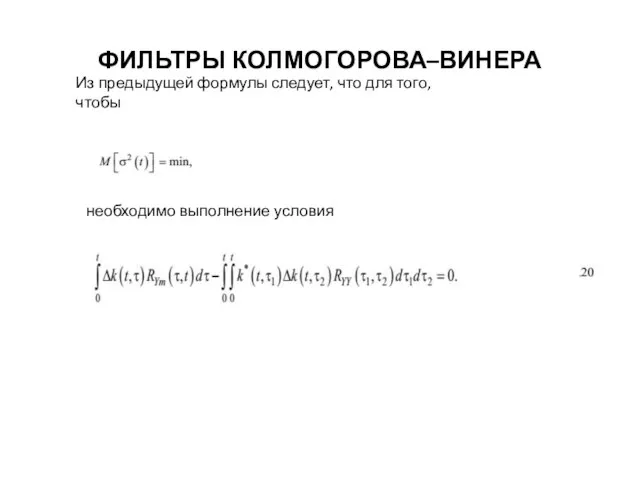
- 11. ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА Из предыдущей формулы следует, что для того, чтобы необходимо выполнение условия
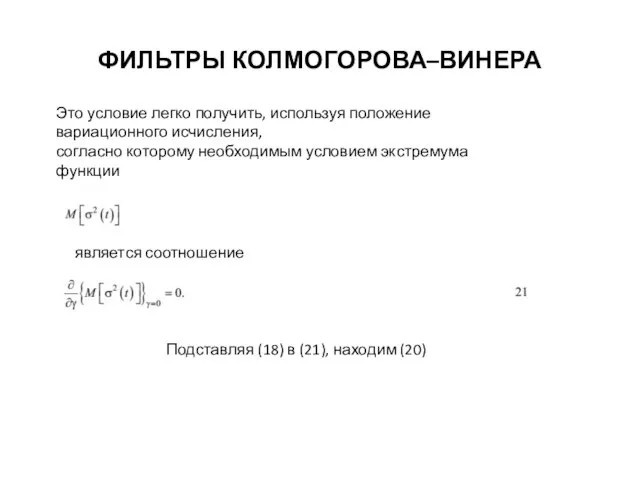
- 12. ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА Это условие легко получить, используя положение вариационного исчисления, согласно которому необходимым условием экстремума функции
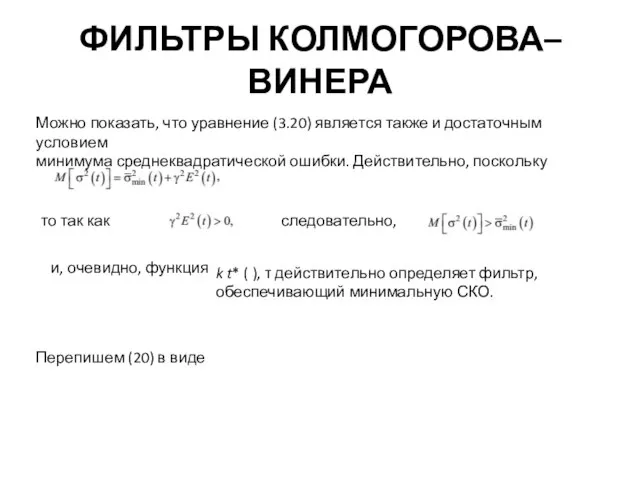
- 13. ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА Можно показать, что уравнение (3.20) является также и достаточным условием минимума среднеквадратической ошибки. Действительно,
- 14. ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
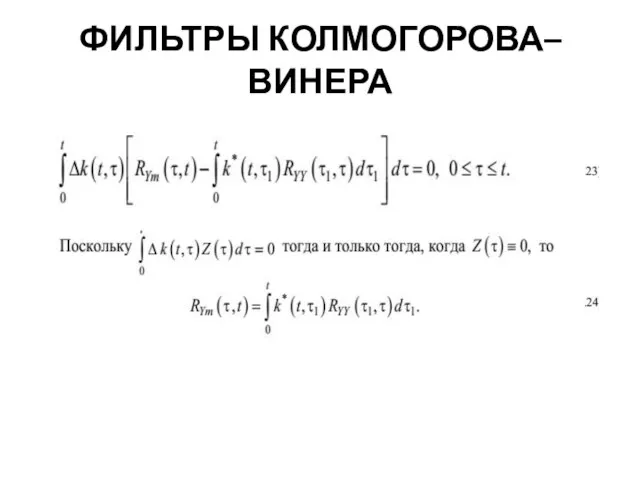
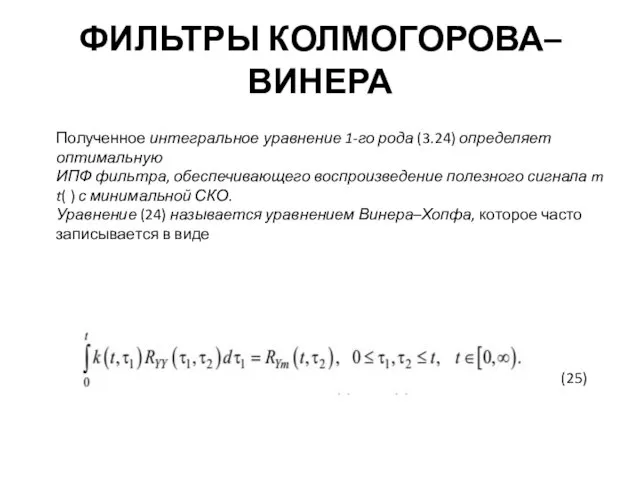
- 15. ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА Полученное интегральное уравнение 1-го рода (3.24) определяет оптимальную ИПФ фильтра, обеспечивающего воспроизведение полезного сигнала
- 16. ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА Для рассматриваемого случая уравнение Винера–Хопфа имеет вид (26)
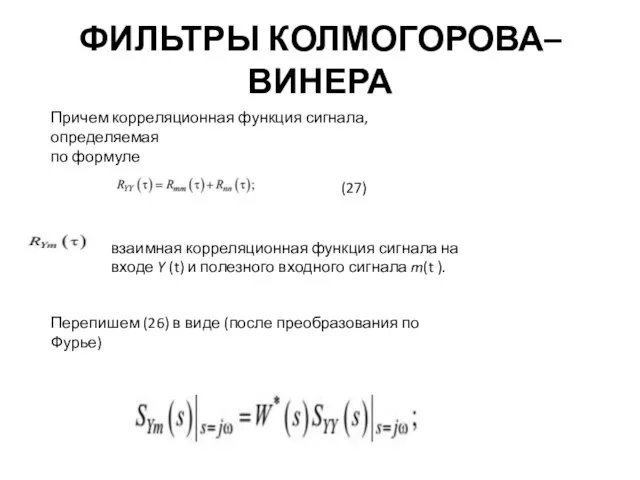
- 17. ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА Причем корреляционная функция сигнала, определяемая по формуле взаимная корреляционная функция сигнала на входе Y
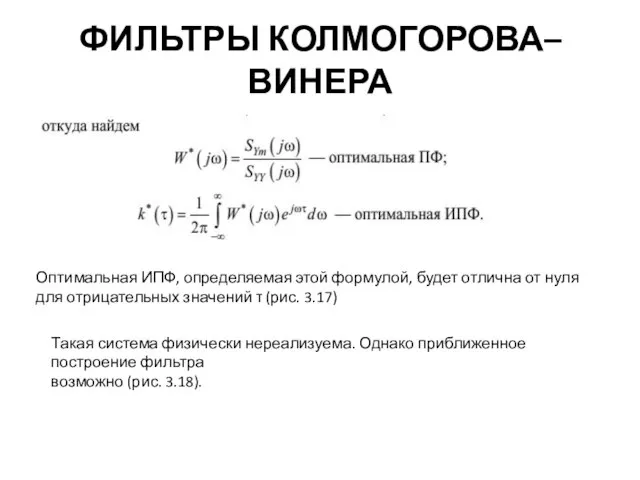
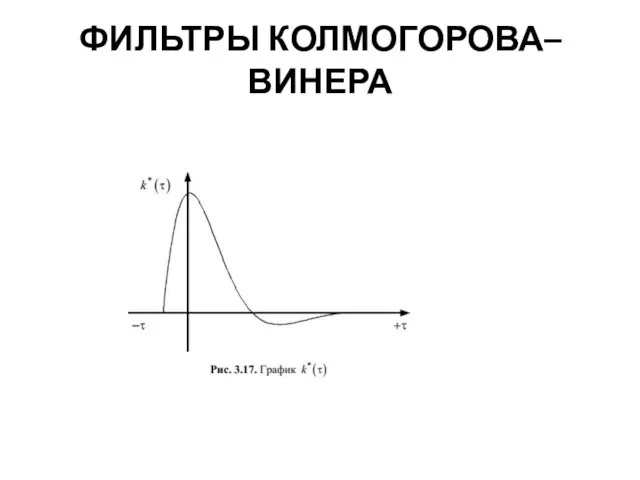
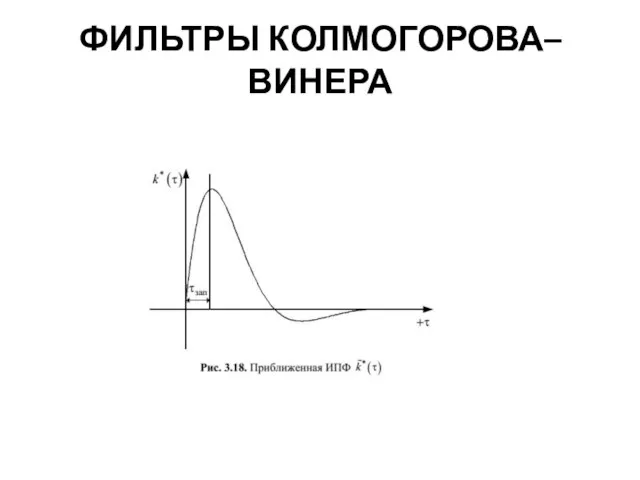
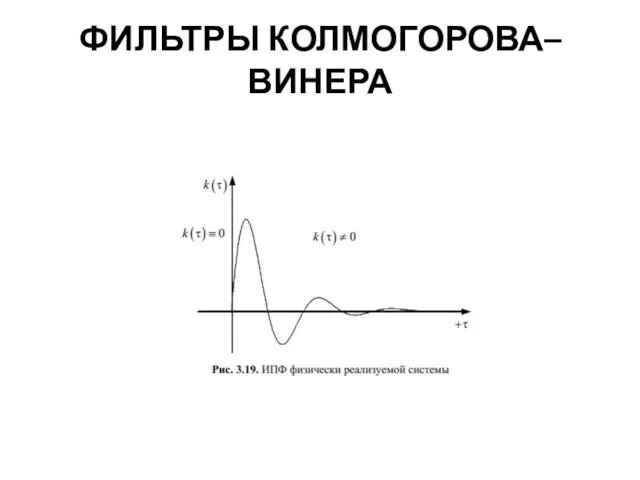
- 18. ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА Оптимальная ИПФ, определяемая этой формулой, будет отлична от нуля для отрицательных значений τ (рис.
- 19. ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
- 20. ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
- 21. ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
- 22. ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
- 23. ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
- 25. Скачать презентацию
Слайд 3ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Заданы взаимно некоррелированные центрированные нестационарные случайные
процессы в виде функций времени m
ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Заданы взаимно некоррелированные центрированные нестационарные случайные процессы в виде функций времени m
Слайд 4ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Требуется найти ИПФ k( t*, τ) фильтра, оптимальным образом выделяющего
реализацию случайного
ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Требуется найти ИПФ k( t*, τ) фильтра, оптимальным образом выделяющего реализацию случайного
Слайд 5ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Структурная схема, поясняющая постановку задачи фильтрации в классе линей-
ных систем, представлена
ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Структурная схема, поясняющая постановку задачи фильтрации в классе линей- ных систем, представлена
Слайд 6ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Найдем уравнение, определяющее ИПФ оптимальной, в указанном выше смысле,
системы. Положим, что
ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Найдем уравнение, определяющее ИПФ оптимальной, в указанном выше смысле, системы. Положим, что
Слайд 7ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
После осреднения по множеству получим
Для квадрата ошибки можно записать выражение
ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
После осреднения по множеству получим
Для квадрата ошибки можно записать выражение
Слайд 8ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Предположим, что
т.е. ИПФ k t( , τ) отличается от оптимальной ИПФ
ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Предположим, что
т.е. ИПФ k t( , τ) отличается от оптимальной ИПФ
Слайд 9ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Тогда из предыдущих двух формул следует
ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Тогда из предыдущих двух формул следует
Слайд 10ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Слайд 11ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Из предыдущей формулы следует, что для того, чтобы
необходимо выполнение условия
ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Из предыдущей формулы следует, что для того, чтобы
необходимо выполнение условия
Слайд 12ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Это условие легко получить, используя положение вариационного исчисления,
согласно которому необходимым условием
ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Это условие легко получить, используя положение вариационного исчисления, согласно которому необходимым условием
Слайд 13ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Можно показать, что уравнение (3.20) является также и достаточным условием
минимума среднеквадратической
ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Можно показать, что уравнение (3.20) является также и достаточным условием минимума среднеквадратической
Слайд 14ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Слайд 15ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Полученное интегральное уравнение 1-го рода (3.24) определяет оптимальную
ИПФ фильтра, обеспечивающего воспроизведение
ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Полученное интегральное уравнение 1-го рода (3.24) определяет оптимальную ИПФ фильтра, обеспечивающего воспроизведение
Слайд 16ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Для рассматриваемого случая уравнение Винера–Хопфа имеет вид
(26)
ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Для рассматриваемого случая уравнение Винера–Хопфа имеет вид
(26)
Слайд 17ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Причем корреляционная функция сигнала, определяемая
по формуле
взаимная корреляционная функция сигнала на входе
ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Причем корреляционная функция сигнала, определяемая
по формуле
взаимная корреляционная функция сигнала на входе
Слайд 18ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Оптимальная ИПФ, определяемая этой формулой, будет отлична от нуля для отрицательных
ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Оптимальная ИПФ, определяемая этой формулой, будет отлична от нуля для отрицательных
Слайд 19ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Слайд 20ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Слайд 21ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Слайд 22ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
Слайд 23ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА
ФИЛЬТРЫ КОЛМОГОРОВА–ВИНЕРА

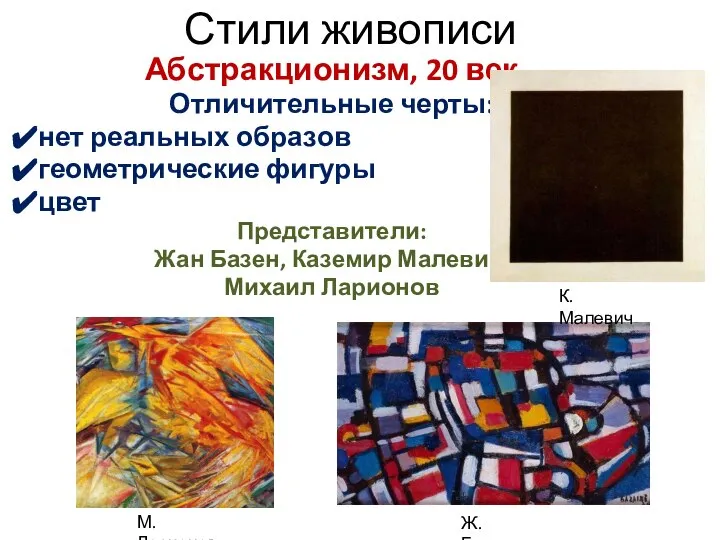 Стили живописи
Стили живописи Проблема человека в Философии
Проблема человека в Философии  Present Perfect
Present Perfect  Построение чертежа ночной сорочки
Построение чертежа ночной сорочки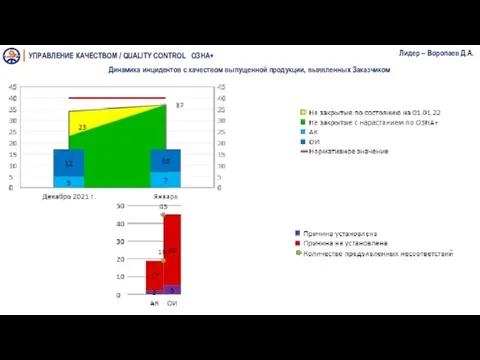 Управление качеством / quality control
Управление качеством / quality control Биология. Вводный урок
Биология. Вводный урок Гражданские правоотношения. 9 класс
Гражданские правоотношения. 9 класс Результативность усвоения общеобразовательнойпрограммы ДОУ
Результативность усвоения общеобразовательнойпрограммы ДОУ Гастрономические фестивали как региональные бренды
Гастрономические фестивали как региональные бренды Трудоустройство несовершеннолетних
Трудоустройство несовершеннолетних Ледовая фантазия
Ледовая фантазия Образовательная технология Ситуация
Образовательная технология Ситуация От новичка до владельца собственной студии. Центр перманентного макияжа SECRET PM
От новичка до владельца собственной студии. Центр перманентного макияжа SECRET PM Жуковский «Светлана»
Жуковский «Светлана» НАШ ГОРОД
НАШ ГОРОД Презентация на тему Функция y=k/x
Презентация на тему Функция y=k/x Назад в средневековье 6 класс
Назад в средневековье 6 класс 20180102_do_m_zhalsabonlv_konspekt
20180102_do_m_zhalsabonlv_konspekt Презентация на тему Что значит быть моральным
Презентация на тему Что значит быть моральным Разработка системы мониторинга посещаемости УИПК
Разработка системы мониторинга посещаемости УИПК Берегите здоровье
Берегите здоровье Условия и механизмы функционирования рынка информационных услуг и продуктов
Условия и механизмы функционирования рынка информационных услуг и продуктов Американо-российская двусторонняя президентская комиссия: Рабочая группа по противодействию незаконному обороту наркотиков
Американо-российская двусторонняя президентская комиссия: Рабочая группа по противодействию незаконному обороту наркотиков Электроэнергетика России
Электроэнергетика России Новые технологии в строительстве
Новые технологии в строительстве Качество подготовки выпускников МОУ Досатуйской СОШ
Качество подготовки выпускников МОУ Досатуйской СОШ Круглое королевство
Круглое королевство Презентация на тему Число и цифра 2 (1 класс)
Презентация на тему Число и цифра 2 (1 класс)