- Индуктивные преобразователи

Содержание
- 2. Особенности индуктивных преобразователей Отсутствие скользящих контактов – повышение надежности Недостаток – будут чувствительны к питающему напряжению
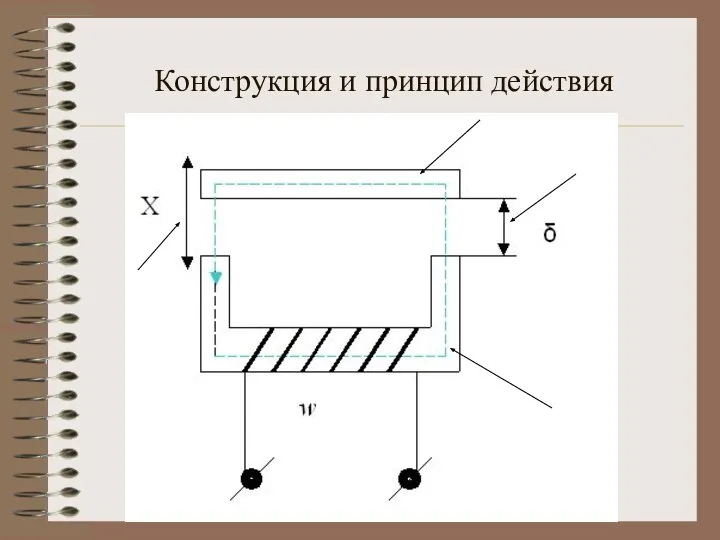
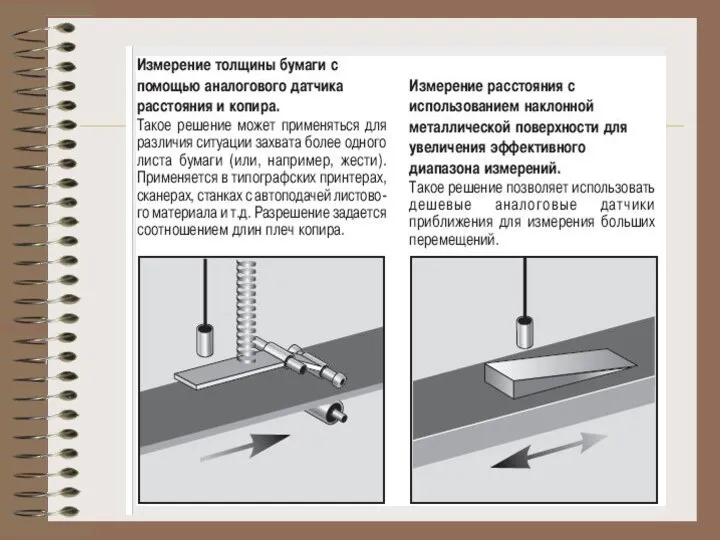
- 3. Конструкция и принцип действия
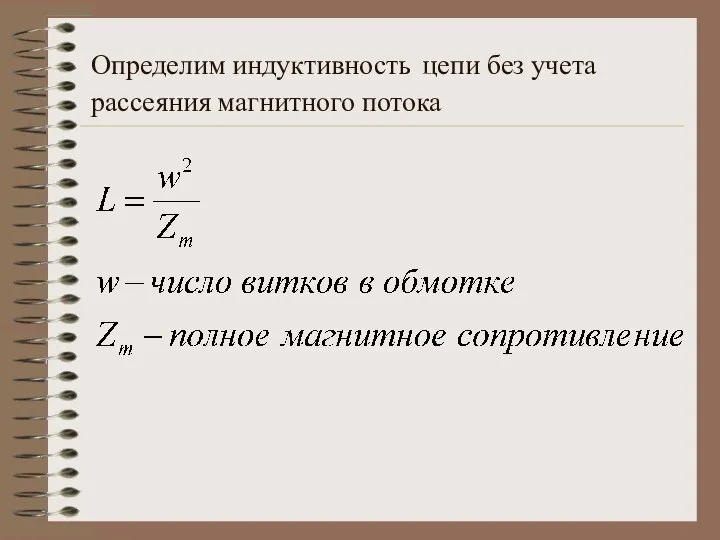
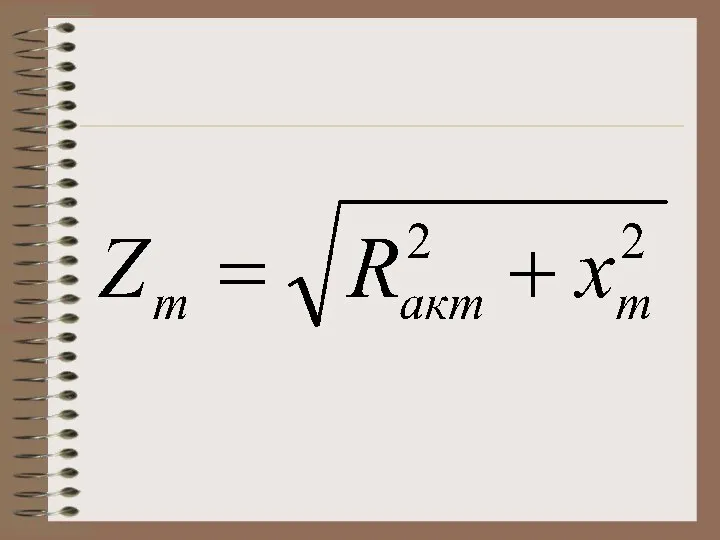
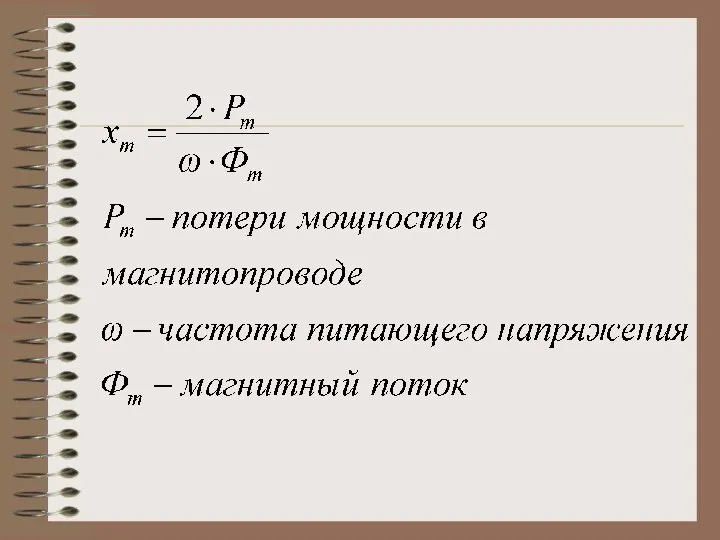
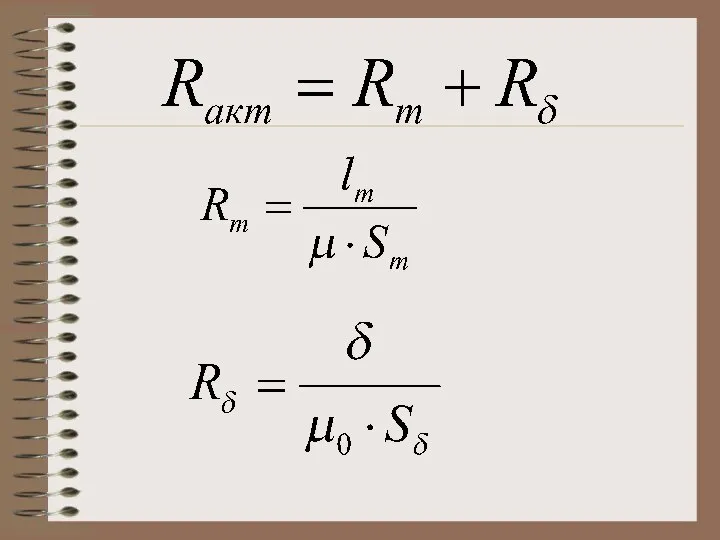
- 4. Определим индуктивность цепи без учета рассеяния магнитного потока
- 8. Выводы: Если под воздействием перемещения изменять какой-либо из параметров, то будет меняться индуктивность всего устройства Теоретически
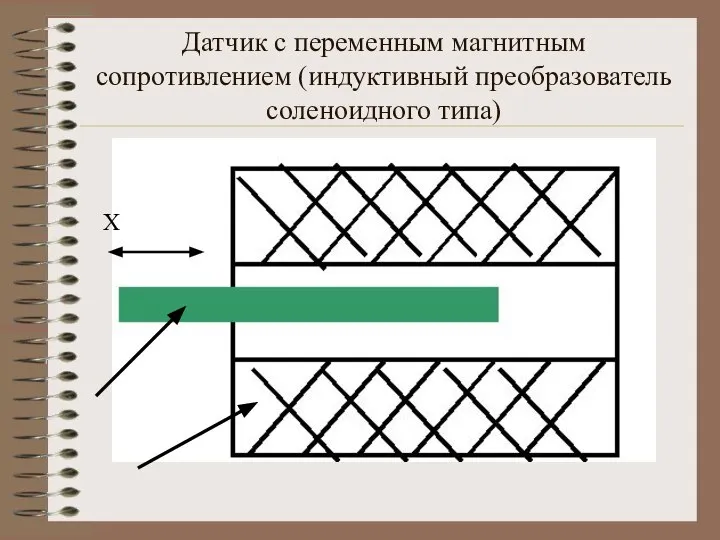
- 9. Датчик с переменным магнитным сопротивлением (индуктивный преобразователь соленоидного типа) Х
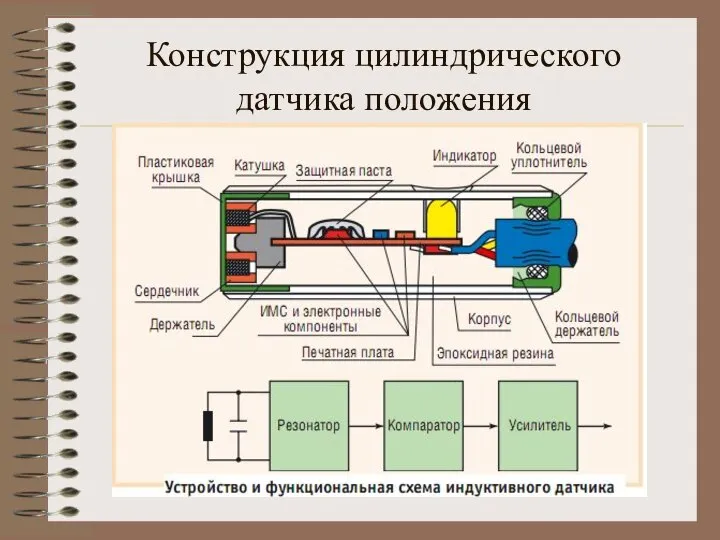
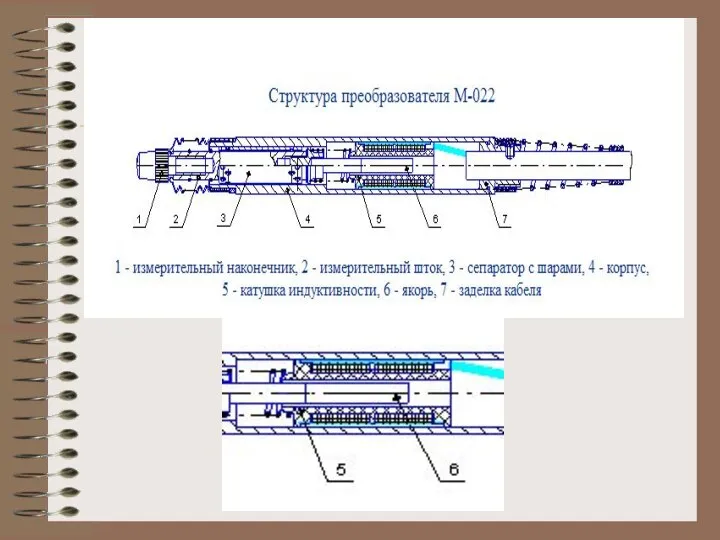
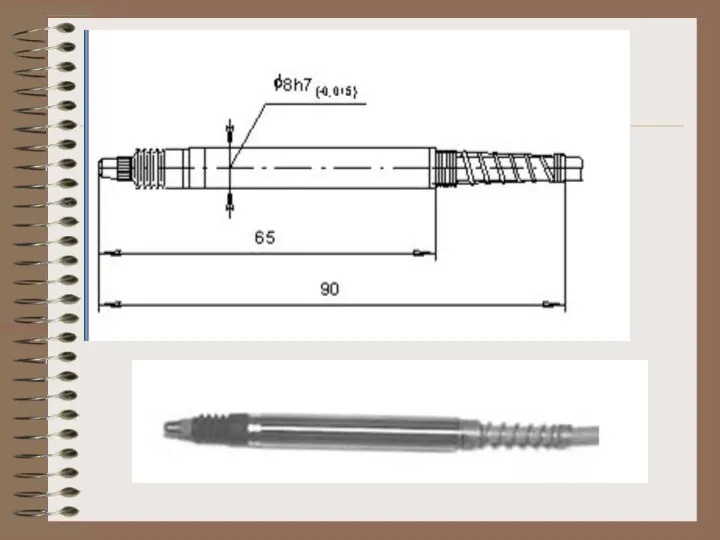
- 10. Конструкция цилиндрического датчика положения
- 11. Принцип работы См. сердечник – там две обмотки – первичная и вторичная Первичная возбуждается переменным напряжением,
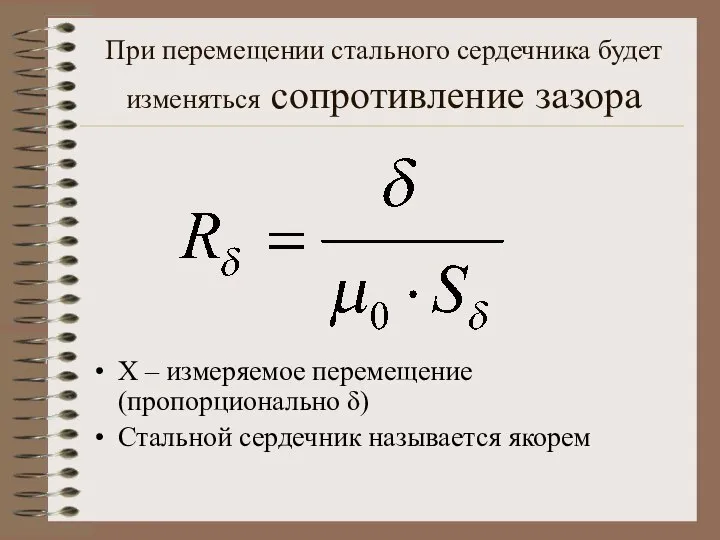
- 12. При перемещении стального сердечника будет изменяться сопротивление зазора Х – измеряемое перемещение (пропорционально δ) Стальной сердечник
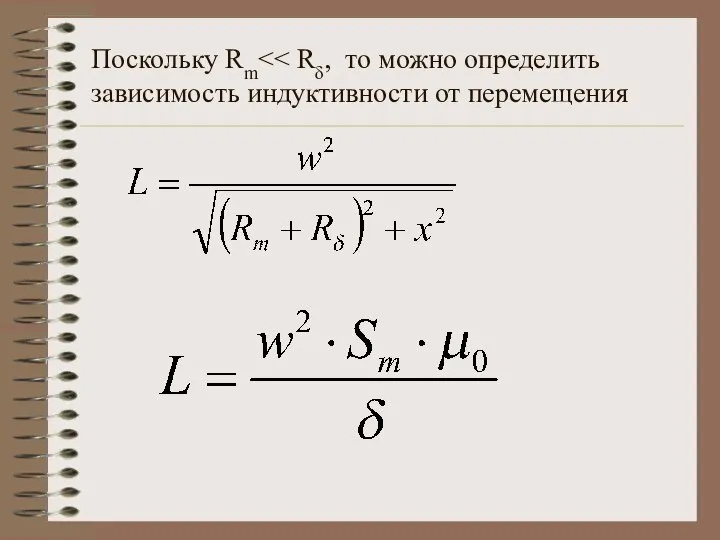
- 13. Поскольку Rm
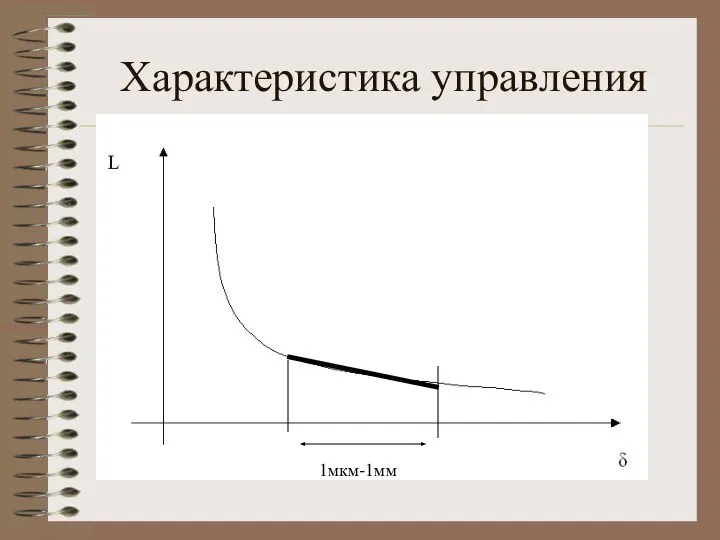
- 14. Характеристика управления 1мкм-1мм
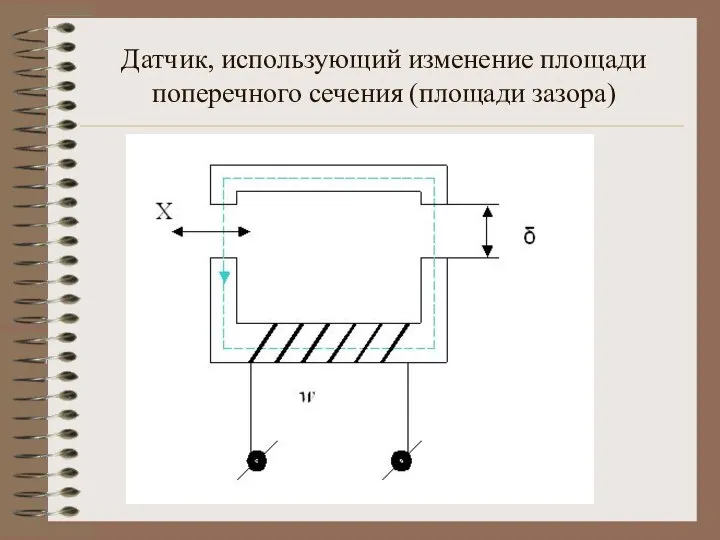
- 15. Датчик, использующий изменение площади поперечного сечения (площади зазора)
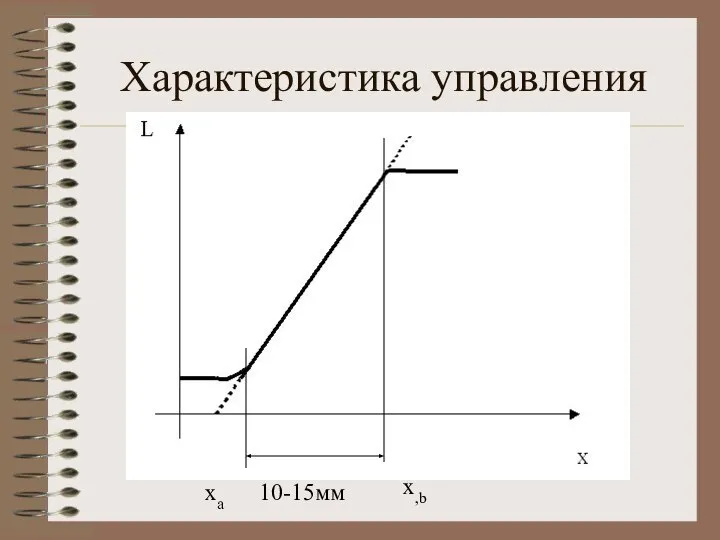
- 16. Характеристика управления xa x,b 10-15мм
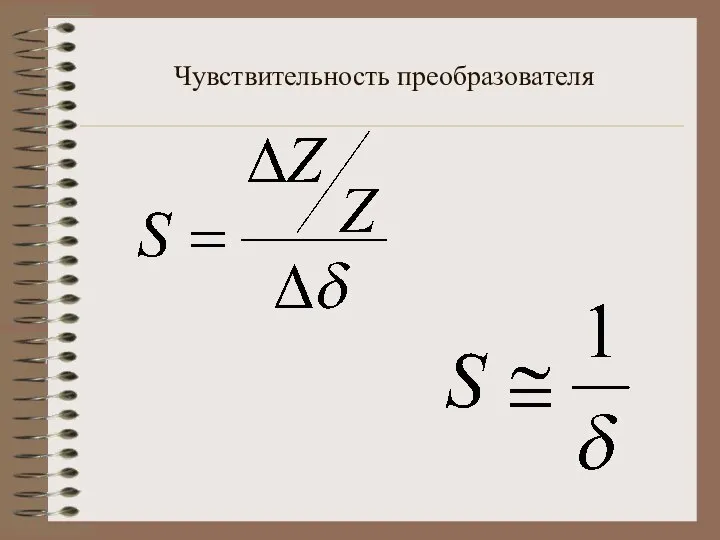
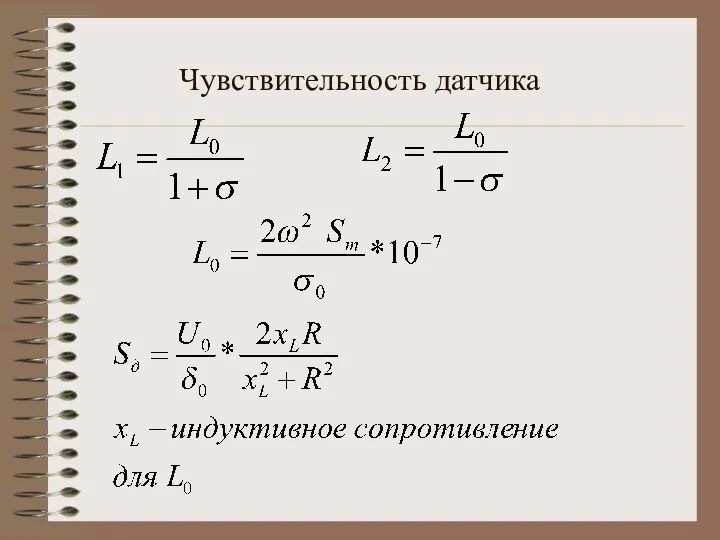
- 17. Чувствительность преобразователя
- 18. Достоинства и недостатки На якорь действует сила притяжения к сердечнику-погрешность в работе Одинарный датчик – при
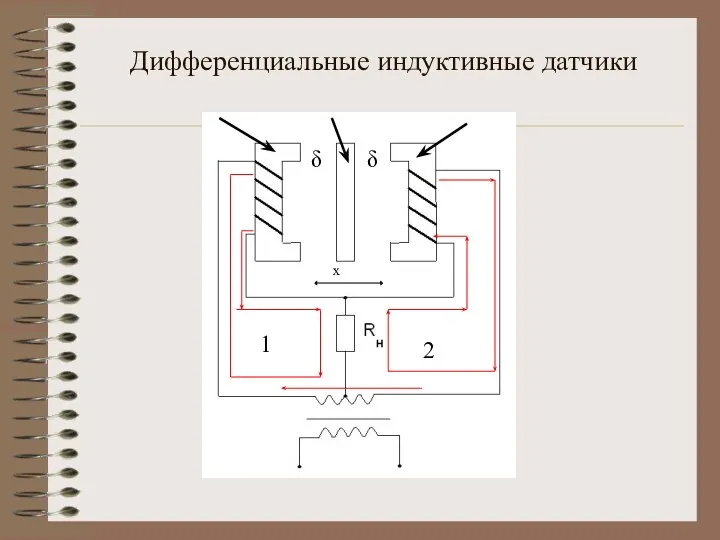
- 25. Дифференциальные индуктивные датчики x δ δ 1 2
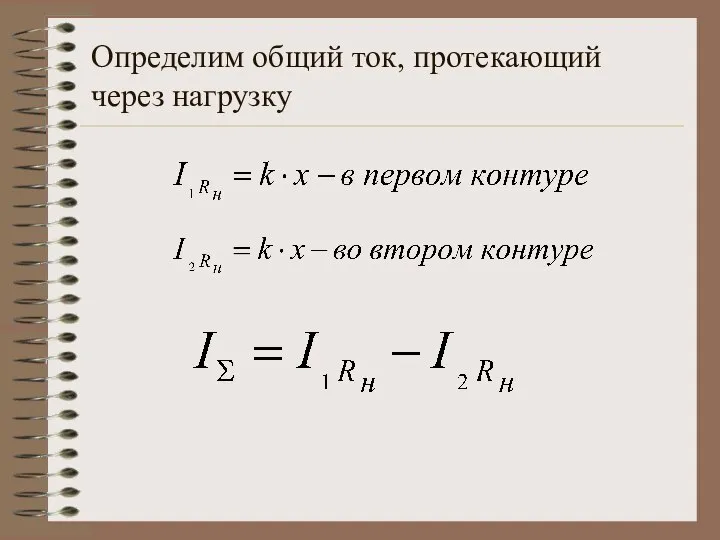
- 26. Определим общий ток, протекающий через нагрузку
- 27. Если якорь строго по середине – перемещение =0 токи равны и суммарный ток =0 Если якорь
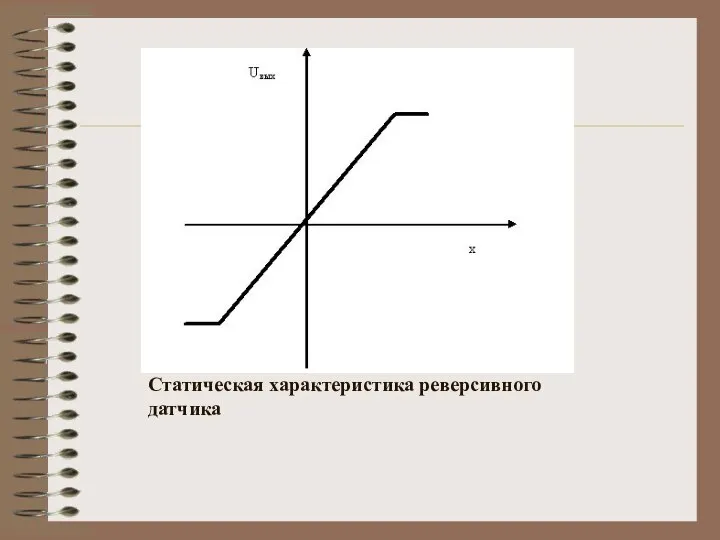
- 28. Статическая характеристика реверсивного датчика
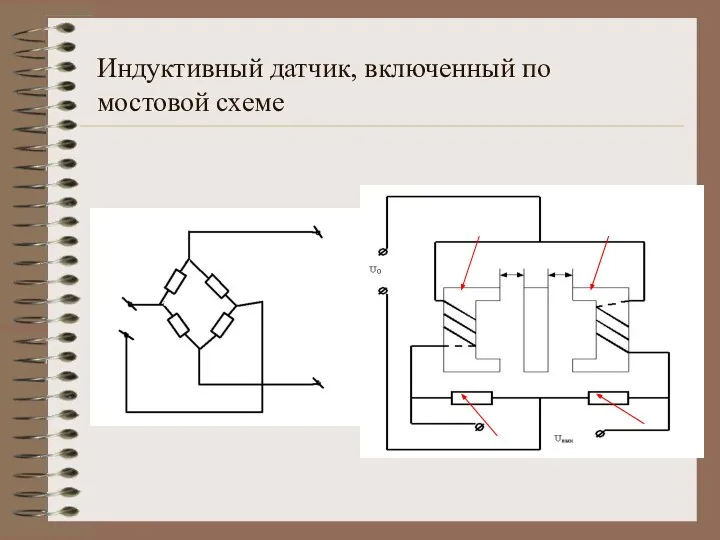
- 29. Индуктивный датчик, включенный по мостовой схеме
- 30. Чувствительность датчика
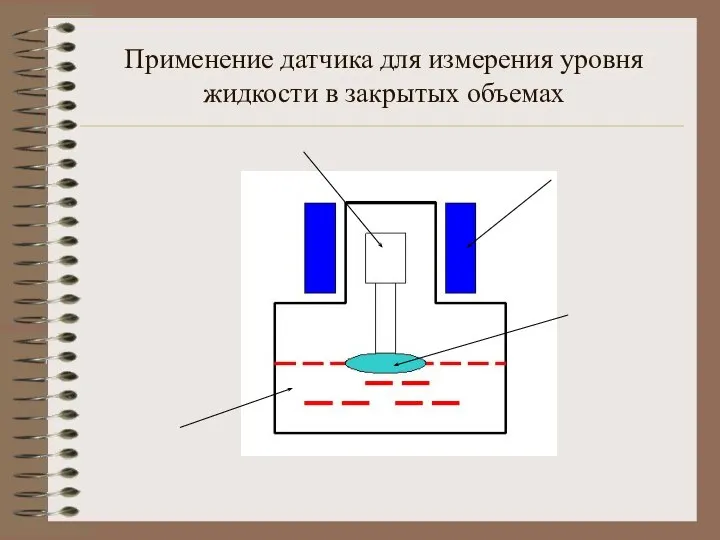
- 31. Применение датчика для измерения уровня жидкости в закрытых объемах
- 33. Скачать презентацию
Слайд 2Особенности индуктивных преобразователей
Отсутствие скользящих контактов – повышение надежности
Недостаток – будут чувствительны к
Особенности индуктивных преобразователей
Отсутствие скользящих контактов – повышение надежности
Недостаток – будут чувствительны к
Слайд 3Конструкция и принцип действия
Конструкция и принцип действия
Слайд 4Определим индуктивность цепи без учета рассеяния магнитного потока
Определим индуктивность цепи без учета рассеяния магнитного потока
Слайд 8Выводы:
Если под воздействием перемещения изменять какой-либо из параметров, то будет меняться индуктивность
Выводы:
Если под воздействием перемещения изменять какой-либо из параметров, то будет меняться индуктивность
Слайд 9Датчик с переменным магнитным сопротивлением (индуктивный преобразователь соленоидного типа)
Х
Датчик с переменным магнитным сопротивлением (индуктивный преобразователь соленоидного типа)
Х
Слайд 10Конструкция цилиндрического датчика положения
Конструкция цилиндрического датчика положения
Слайд 11Принцип работы
См. сердечник – там две обмотки – первичная и вторичная
Первичная возбуждается
Принцип работы
См. сердечник – там две обмотки – первичная и вторичная
Первичная возбуждается
Слайд 12При перемещении стального сердечника будет изменяться сопротивление зазора
Х – измеряемое перемещение (пропорционально
При перемещении стального сердечника будет изменяться сопротивление зазора
Х – измеряемое перемещение (пропорционально
Слайд 13Поскольку Rm<< Rδ, то можно определить зависимость индуктивности от перемещения
Поскольку Rm<< Rδ, то можно определить зависимость индуктивности от перемещения
Слайд 14Характеристика управления
1мкм-1мм
Характеристика управления
1мкм-1мм
Слайд 15Датчик, использующий изменение площади поперечного сечения (площади зазора)
Датчик, использующий изменение площади поперечного сечения (площади зазора)
Слайд 16Характеристика управления
xa
x,b
10-15мм
Характеристика управления
xa
x,b
10-15мм
Слайд 17Чувствительность преобразователя
Чувствительность преобразователя
Слайд 18Достоинства и недостатки
На якорь действует сила притяжения к сердечнику-погрешность в работе
Одинарный
Достоинства и недостатки
На якорь действует сила притяжения к сердечнику-погрешность в работе
Одинарный
Слайд 25Дифференциальные индуктивные датчики
x
δ
δ
1
2
Дифференциальные индуктивные датчики
x
δ
δ
1
2
Слайд 26Определим общий ток, протекающий через нагрузку
Определим общий ток, протекающий через нагрузку
Слайд 27Если якорь строго по середине – перемещение =0 токи равны и суммарный
Если якорь строго по середине – перемещение =0 токи равны и суммарный
Слайд 28Статическая характеристика реверсивного датчика
Статическая характеристика реверсивного датчика
Слайд 29Индуктивный датчик, включенный по мостовой схеме
Индуктивный датчик, включенный по мостовой схеме
Слайд 30Чувствительность датчика
Чувствительность датчика
Слайд 31Применение датчика для измерения уровня жидкости в закрытых объемах
Применение датчика для измерения уровня жидкости в закрытых объемах
 Упаковка проекта. Семь принципов блестящей презентации
Упаковка проекта. Семь принципов блестящей презентации Бетон от производителя для частного строительства
Бетон от производителя для частного строительства Осциллограф ВМ8020
Осциллограф ВМ8020 Презентация "Василий Григорьевич Перов" - скачать презентации по МХК
Презентация "Василий Григорьевич Перов" - скачать презентации по МХК Консультация аллерголога-иммунолога
Консультация аллерголога-иммунолога Опыт осуществленияминистерских процессов ФЛЕГ(Правоприменение и управление в лесном секторе)
Опыт осуществленияминистерских процессов ФЛЕГ(Правоприменение и управление в лесном секторе) Плетёные листья
Плетёные листья Деревенские мотивы в картинах художников-пейзажистов. Тест
Деревенские мотивы в картинах художников-пейзажистов. Тест Суффиксы существительных
Суффиксы существительных Стресс. Последствия влияния стресса на человека
Стресс. Последствия влияния стресса на человека Международная торговля и внешнеторговая политика
Международная торговля и внешнеторговая политика Селекция 10 класс
Селекция 10 класс Томас Браун (1778-1820)
Томас Браун (1778-1820) Учет расходов на научно-исследовательские, опытно-конструкторские и технологические работы
Учет расходов на научно-исследовательские, опытно-конструкторские и технологические работы Логика. Решение экзаменационных задач
Логика. Решение экзаменационных задач Городская легенда. Старый мост через Силинку
Городская легенда. Старый мост через Силинку Отличительные особенности местного самоуправления и государственного управления
Отличительные особенности местного самоуправления и государственного управления 20140312_prezentatsiyafefilov_kostya_2_b_kl
20140312_prezentatsiyafefilov_kostya_2_b_kl Организационная структура Общероссийского Союза Образования
Организационная структура Общероссийского Союза Образования Портфолио документов предшествующего образования
Портфолио документов предшествующего образования В моей презентации представлены эскизы вечерних платьев, выполненные в графическом редакторе «Adobe Photoshop». Эти эскизы- мое личное тв
В моей презентации представлены эскизы вечерних платьев, выполненные в графическом редакторе «Adobe Photoshop». Эти эскизы- мое личное тв Энергосбережение и энергоэффективность
Энергосбережение и энергоэффективность 6- DEHB
6- DEHB Моят роден град
Моят роден град Oтчет Сентябрь 2011
Oтчет Сентябрь 2011 Учет денежных средств
Учет денежных средств Разработка к урокам истории и технологии: «Загадки якутского костюма»
Разработка к урокам истории и технологии: «Загадки якутского костюма» Гороскоп первоклассника
Гороскоп первоклассника