- Изменения в версии ПО авионики V60

Содержание
- 2. Перечень реализуемых изменений Корректировка начального этапа режима «Взлёт» в части заданной скорости и FD; Изменение логики
- 3. Перечень реализуемых изменений Изменение логики срабатывания сигнализации «FLAPS NOT TO»; Изменение логики расчета VLS, AOAsw, AOAprot,
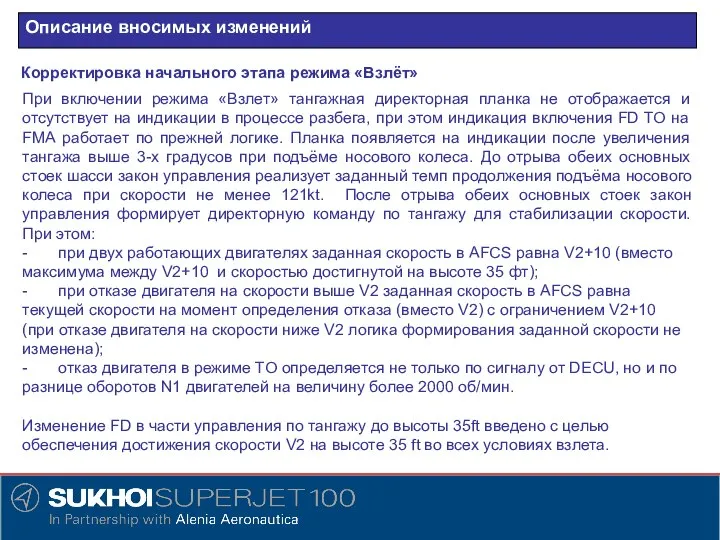
- 4. Описание вносимых изменений Корректировка начального этапа режима «Взлёт» При включении режима «Взлет» тангажная директорная планка не
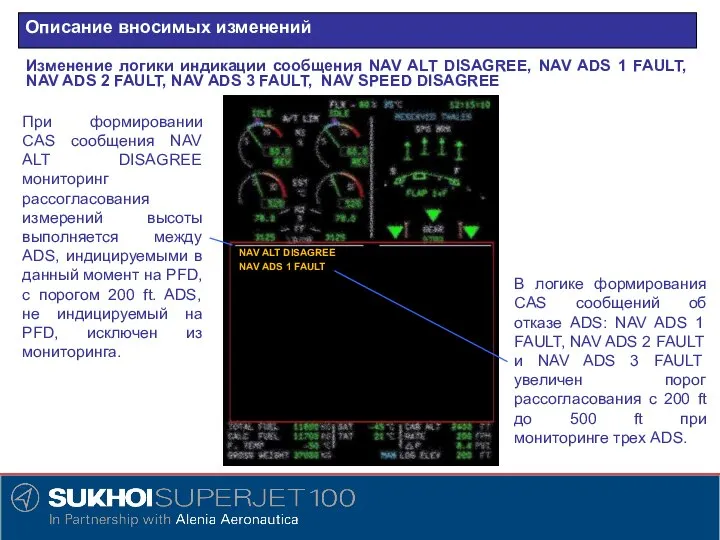
- 5. Описание вносимых изменений Изменение логики индикации сообщения NAV ALT DISAGREE, NAV ADS 1 FAULT, NAV ADS
- 6. Описание вносимых изменений Введение новых CAS сообщений по системе «двигатели» Изменена логика CAS сообщений «ENG L
- 7. Описание вносимых изменений Изменение логики CAS сообщений «ENG L OVERTHR PROT FAULT» и «ENG L OVERTHR
- 8. Описание вносимых изменений Изменение логики CAS сообщений системы торможения и шасси Изменена логика CAS сообщений системы
- 9. Описание вносимых изменений Изменение логики CAS сообщений системы торможения и шасси BRAKE OVERHEAT Условия индикации CAS
- 10. Описание вносимых изменений Изменение порогов контроля автомата тяги для режима FLEX Изменён принцип контроля автомата тяги
- 11. Описание вносимых изменений Устранение нерасчётного кренения при захвате курсового маяка из режима LNAV Для устранения интенсивной
- 12. Описание вносимых изменений Изменение в AFA логики снятия сигнализации FLEX с EWD Условие снятия индикации FLEX
- 13. Описание вносимых изменений Корректировка логики заданной скорости при включении режима ALT* из режима «Уход на 2-й
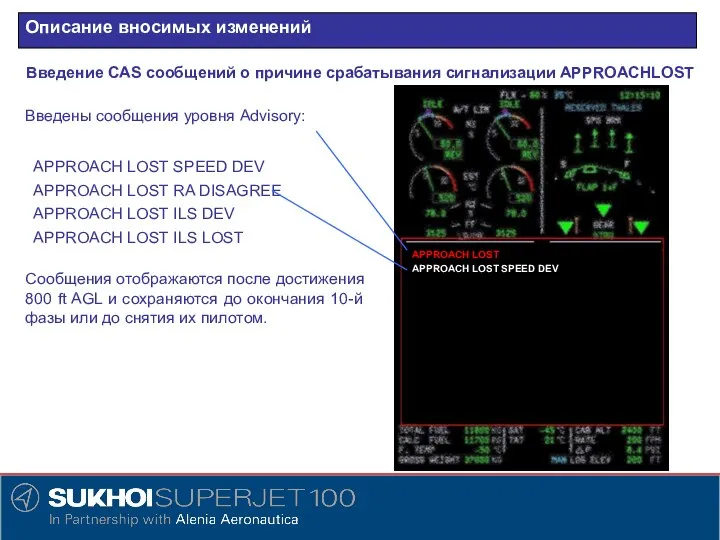
- 14. Описание вносимых изменений Введение CAS сообщений о причине срабатывания сигнализации APPROACHLOST Введены сообщения уровня Advisory: APPROACH
- 15. Описание вносимых изменений Изменение сигнализации перехода заданной скорости с FMS на FCP Для случая потери заданной
- 16. Описание вносимых изменений Взлет в конфигурации FLAPS 3 Вводится новая взлётная конфигурация самолёта с закрылками в
- 17. Описание вносимых изменений Изменение логики срабатывания сигнализации «FLAPS NOT TO» Логика срабатывания CAS сообщения «FLAPS NOT
- 18. Описание вносимых изменений Изменение логики расчета VLS, AOAsw, AOAprot, AOAmax Изменены табличные функции AOAsw, AOAprot, AOAmax
- 19. Описание вносимых изменений Изменения в FMS Внесены следующие изменения в файлах базы данных ЛТХ (PDB) для
- 20. Изменения, реализуемые после внедрения главного изменения “Внедрение версий ПО систем авионики V601” Главные изменения: Обеспечение захода
- 22. Скачать презентацию
Слайд 2Перечень реализуемых изменений
Корректировка начального этапа режима «Взлёт» в части заданной скорости и
Перечень реализуемых изменений
Корректировка начального этапа режима «Взлёт» в части заданной скорости и
Слайд 3Перечень реализуемых изменений
Изменение логики срабатывания сигнализации «FLAPS NOT TO»;
Изменение логики расчета VLS,
Перечень реализуемых изменений
Изменение логики срабатывания сигнализации «FLAPS NOT TO»;
Изменение логики расчета VLS,
Слайд 4Описание вносимых изменений
Корректировка начального этапа режима «Взлёт»
При включении режима «Взлет» тангажная
Описание вносимых изменений
Корректировка начального этапа режима «Взлёт»
При включении режима «Взлет» тангажная
Слайд 5Описание вносимых изменений
Изменение логики индикации сообщения NAV ALT DISAGREE, NAV ADS 1
Описание вносимых изменений
Изменение логики индикации сообщения NAV ALT DISAGREE, NAV ADS 1
Слайд 6Описание вносимых изменений
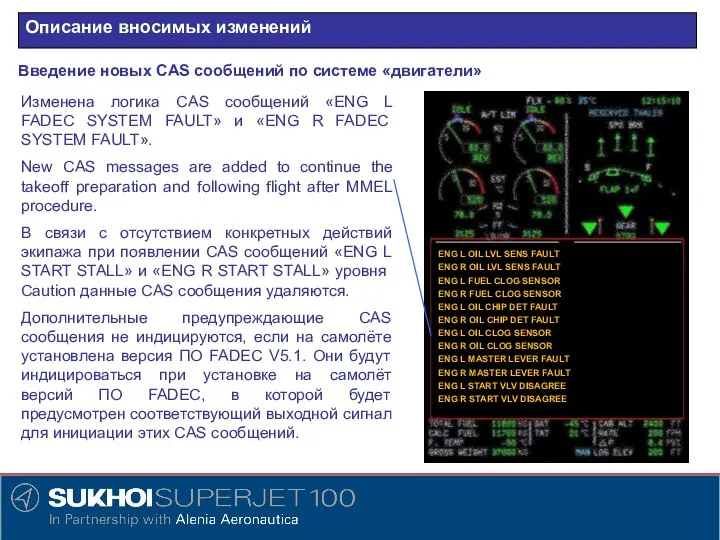
Введение новых CAS сообщений по системе «двигатели»
Изменена логика CAS сообщений
Описание вносимых изменений
Введение новых CAS сообщений по системе «двигатели»
Изменена логика CAS сообщений
Слайд 7Описание вносимых изменений
Изменение логики CAS сообщений «ENG L OVERTHR PROT FAULT» и
Описание вносимых изменений
Изменение логики CAS сообщений «ENG L OVERTHR PROT FAULT» и
Слайд 8Описание вносимых изменений
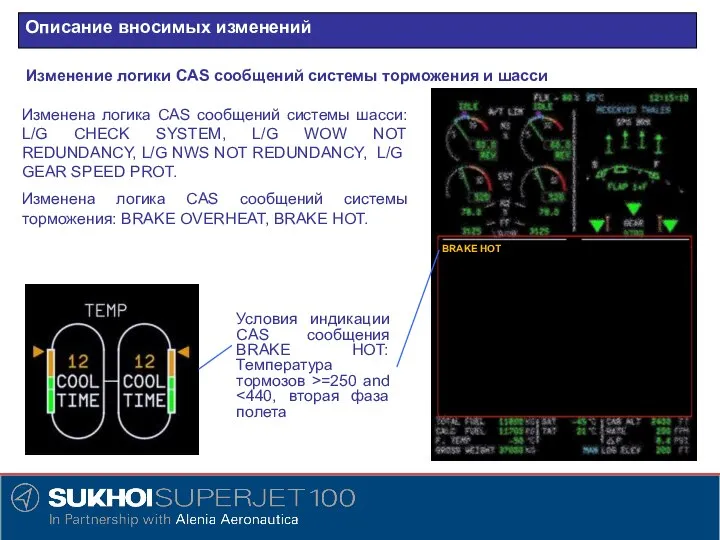
Изменение логики CAS сообщений системы торможения и шасси
Изменена логика CAS
Описание вносимых изменений
Изменение логики CAS сообщений системы торможения и шасси
Изменена логика CAS
Слайд 9Описание вносимых изменений
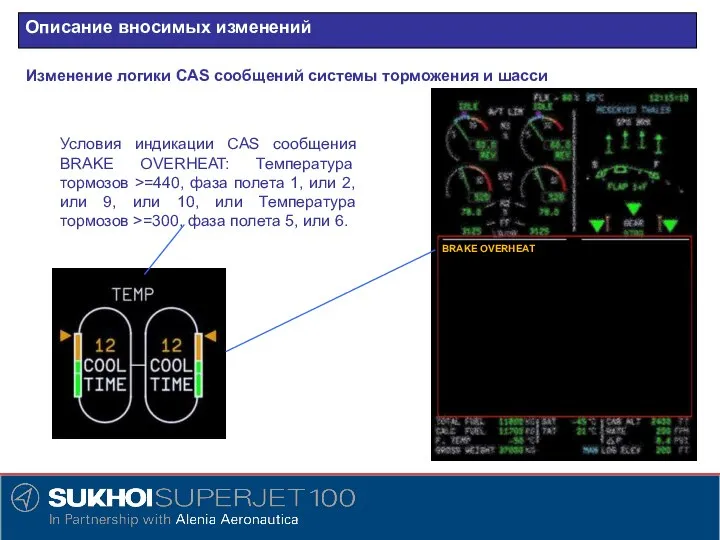
Изменение логики CAS сообщений системы торможения и шасси
BRAKE OVERHEAT
Условия индикации
Описание вносимых изменений
Изменение логики CAS сообщений системы торможения и шасси
BRAKE OVERHEAT
Условия индикации
Слайд 10Описание вносимых изменений
Изменение порогов контроля автомата тяги для режима FLEX
Изменён принцип контроля
Описание вносимых изменений
Изменение порогов контроля автомата тяги для режима FLEX
Изменён принцип контроля
Слайд 11Описание вносимых изменений
Устранение нерасчётного кренения при захвате курсового маяка из режима LNAV
Для
Описание вносимых изменений
Устранение нерасчётного кренения при захвате курсового маяка из режима LNAV
Для
Слайд 12Описание вносимых изменений
Изменение в AFA логики снятия сигнализации FLEX с EWD
Условие снятия
Описание вносимых изменений
Изменение в AFA логики снятия сигнализации FLEX с EWD
Условие снятия
Слайд 13Описание вносимых изменений
Корректировка логики заданной скорости при включении режима ALT* из режима
Описание вносимых изменений
Корректировка логики заданной скорости при включении режима ALT* из режима
Слайд 14Описание вносимых изменений
Введение CAS сообщений о причине срабатывания сигнализации APPROACHLOST
Введены сообщения уровня
Описание вносимых изменений
Введение CAS сообщений о причине срабатывания сигнализации APPROACHLOST
Введены сообщения уровня
Слайд 15Описание вносимых изменений
Изменение сигнализации перехода заданной скорости с FMS на FCP
Для случая
Описание вносимых изменений
Изменение сигнализации перехода заданной скорости с FMS на FCP
Для случая
Слайд 16Описание вносимых изменений
Взлет в конфигурации FLAPS 3
Вводится новая взлётная конфигурация самолёта с
Описание вносимых изменений
Взлет в конфигурации FLAPS 3
Вводится новая взлётная конфигурация самолёта с
Слайд 17Описание вносимых изменений
Изменение логики срабатывания сигнализации «FLAPS NOT TO»
Логика срабатывания CAS сообщения
Описание вносимых изменений
Изменение логики срабатывания сигнализации «FLAPS NOT TO»
Логика срабатывания CAS сообщения
Слайд 18Описание вносимых изменений
Изменение логики расчета VLS, AOAsw, AOAprot, AOAmax
Изменены табличные функции AOAsw,
Описание вносимых изменений
Изменение логики расчета VLS, AOAsw, AOAprot, AOAmax
Изменены табличные функции AOAsw,
Слайд 19Описание вносимых изменений
Изменения в FMS
Внесены следующие изменения в файлах базы данных ЛТХ
Описание вносимых изменений
Изменения в FMS
Внесены следующие изменения в файлах базы данных ЛТХ
Слайд 20Изменения, реализуемые после внедрения главного изменения
“Внедрение версий ПО систем авионики V601”
Главные
Изменения, реализуемые после внедрения главного изменения
“Внедрение версий ПО систем авионики V601”
Главные
 Бизнес-план (практическая работа №2)
Бизнес-план (практическая работа №2) Сложные эфиры
Сложные эфиры Периоды раннего детского возраста от 1 года до 3 лет
Периоды раннего детского возраста от 1 года до 3 лет Как представить четырехмерное пространство главных компонентв анализе данных “Политического Атласа Современности”?
Как представить четырехмерное пространство главных компонентв анализе данных “Политического Атласа Современности”? Организация работы по отборку кадров
Организация работы по отборку кадров Анализ итогов первого Всероссийского конкурсана лучший коллективный договор
Анализ итогов первого Всероссийского конкурсана лучший коллективный договор Развитие познавательной активности на уроках русского языка в начальной школе
Развитие познавательной активности на уроках русского языка в начальной школе Деловая игра «Выборы Президента Российской Федерации»
Деловая игра «Выборы Президента Российской Федерации» Математическое моделирование
Математическое моделирование Многомерный анализ данных на основе Oracle Essbase
Многомерный анализ данных на основе Oracle Essbase Супрематизм Казимира Малевича
Супрематизм Казимира Малевича Воронка продаж. Посадочная страница
Воронка продаж. Посадочная страница Если хочешь быть здоров (1-2 класс)
Если хочешь быть здоров (1-2 класс) Дәріс1. Основы обеспечения информационной безопасности каз
Дәріс1. Основы обеспечения информационной безопасности каз 20171022_uslugi_geografiya
20171022_uslugi_geografiya Синтетические моющие средства или химия в ванной
Синтетические моющие средства или химия в ванной Hotels in Great Britain
Hotels in Great Britain Смартфон Iphone
Смартфон Iphone С днем рождения!!!
С днем рождения!!! Иванова Варвара (о Яренске)
Иванова Варвара (о Яренске) Снять усталость ощутимо Сможет кресло Takasima Takasima.Ru - Санкт-Петербург, Дровяная ул., д. 9
Снять усталость ощутимо Сможет кресло Takasima Takasima.Ru - Санкт-Петербург, Дровяная ул., д. 9 Производство и технологии
Производство и технологии Ландшафтный дизайн участка
Ландшафтный дизайн участка Лекция 4. Машины для содержания автомобильных дорог и искуссвенных сооружений
Лекция 4. Машины для содержания автомобильных дорог и искуссвенных сооружений Космическая станция МКС
Космическая станция МКС Родительские собрания в группах
Родительские собрания в группах Теории личностного самосовершенствования
Теории личностного самосовершенствования Презентация на тему простейшие задачи в координатах 9 класс
Презентация на тему простейшие задачи в координатах 9 класс