- Классификация электроприводов

Содержание
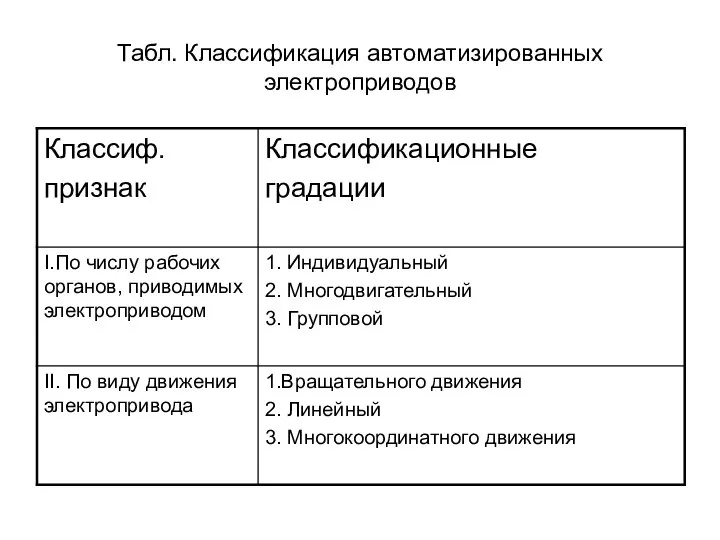
- 2. Табл. Классификация автоматизированных электроприводов
- 5. Электроприводы бывают индивидуальными и групповыми. Если каждый рабочий орган машины приводится в действие своим электроприводом, то
- 6. Классификация по виду движения электродвигателя. Наибольшее, а до недавнего времени исключительное применение получили электроприводы вращательного движения.
- 7. Создание новых эффективных конструкций линейных двигателей с питанием их от полупроводниковых преобразователей частоты открывает новые возможности
- 8. Многокоординатные электроприводы на основе специальных шаговых электродвигателей являются отечественной разработкой и находят применение в высокоточных робототехнических
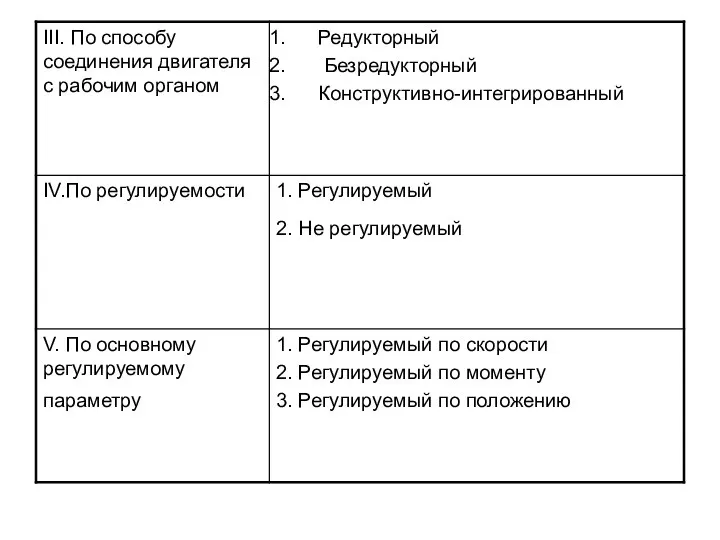
- 9. Электродвигатели соединяются с рабочим органом машины либо непосредственно, либо через редуктор или другую кинематическую передачу. Непосредственное
- 10. В последние годы стремятся, особенно для высокоточных электроприводов, конструктивно объединить рабочий орган с приводным электродвигателем. Примерами
- 11. Под регулируемостью понимается возможность изменения или точного поддержания скорости, ускорения или момента усилия приводного электродвигателя.
- 12. Понятие регулируемый электропривод включает в себя выполнение следующих функций: • установка требуемой скорости в пределах заданного
- 13. В зависимости от диапазона регулирования скорости, регулируемые электроприводы разделяются на: регулируемые приводы с ограниченным диапазоном регулирования
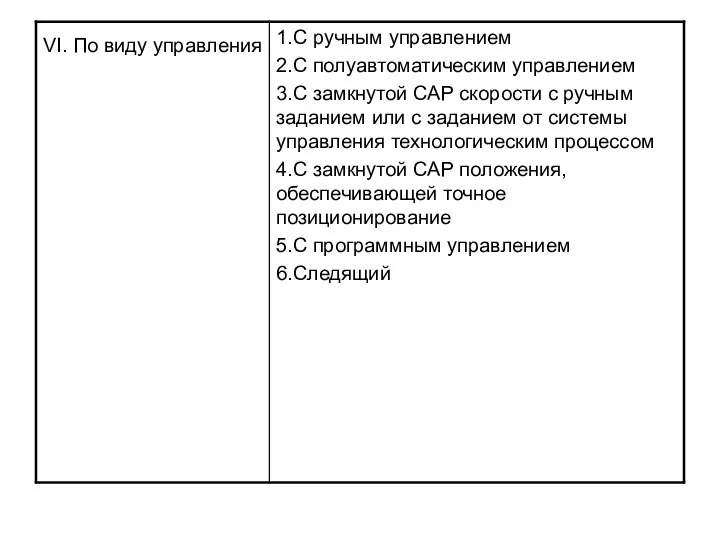
- 14. Классификация электроприводов по виду управления включает в себя электроприводы с системами управления, различающимися по их функциональным
- 15. Электроприводы с полуавтоматическим управлением подразумевают управление электроприводом оператором с помощью командо-контроллера, кнопок управления и других аппаратов.
- 17. Скачать презентацию
Слайд 5Электроприводы бывают индивидуальными и групповыми. Если каждый рабочий орган машины приводится в
Электроприводы бывают индивидуальными и групповыми. Если каждый рабочий орган машины приводится в
Слайд 6Классификация по виду движения электродвигателя. Наибольшее, а до недавнего времени исключительное применение
Классификация по виду движения электродвигателя. Наибольшее, а до недавнего времени исключительное применение
Слайд 7Создание новых эффективных конструкций линейных двигателей с питанием их от полупроводниковых преобразователей
Создание новых эффективных конструкций линейных двигателей с питанием их от полупроводниковых преобразователей
Слайд 8Многокоординатные электроприводы на основе специальных шаговых электродвигателей являются отечественной разработкой и находят
Многокоординатные электроприводы на основе специальных шаговых электродвигателей являются отечественной разработкой и находят
Слайд 9Электродвигатели соединяются с рабочим органом машины либо непосредственно, либо через редуктор или
Электродвигатели соединяются с рабочим органом машины либо непосредственно, либо через редуктор или
Слайд 10В последние годы стремятся, особенно для высокоточных электроприводов, конструктивно объединить рабочий орган
В последние годы стремятся, особенно для высокоточных электроприводов, конструктивно объединить рабочий орган
Слайд 11Под регулируемостью понимается возможность изменения или точного поддержания скорости, ускорения или момента
Под регулируемостью понимается возможность изменения или точного поддержания скорости, ускорения или момента
Слайд 12Понятие регулируемый электропривод включает в себя выполнение следующих функций:
• установка
Понятие регулируемый электропривод включает в себя выполнение следующих функций:
• установка
Слайд 13В зависимости от диапазона регулирования скорости, регулируемые электроприводы разделяются на:
регулируемые приводы с
В зависимости от диапазона регулирования скорости, регулируемые электроприводы разделяются на:
регулируемые приводы с
Слайд 14Классификация электроприводов по виду управления включает в себя электроприводы с системами управления,
Классификация электроприводов по виду управления включает в себя электроприводы с системами управления,
Слайд 15Электроприводы с полуавтоматическим управлением подразумевают управление электроприводом оператором с помощью командо-контроллера, кнопок
Электроприводы с полуавтоматическим управлением подразумевают управление электроприводом оператором с помощью командо-контроллера, кнопок
 Таблицы в документах Word
Таблицы в документах Word 20170423_prezentatsiya_k_uroku
20170423_prezentatsiya_k_uroku Сварка в среде защитных газов Цель занятия: знать сведения о защитных газах
Сварка в среде защитных газов Цель занятия: знать сведения о защитных газах Реклама зрелищ
Реклама зрелищ Viel [PowerPoint] (27-Sep-2022-195717)
Viel [PowerPoint] (27-Sep-2022-195717) Российская Федерация и КНДР
Российская Федерация и КНДР Регулирование тепловой нагрузки в ИТП
Регулирование тепловой нагрузки в ИТП ООО «Ролл Групп»
ООО «Ролл Групп» Восточная Европа
Восточная Европа Психологическая характеристика мышления
Психологическая характеристика мышления Умножение десятичных дробей
Умножение десятичных дробей Ораторское искусство
Ораторское искусство Методы анализа
Методы анализа Презентация на тему Разнообразие и распространение организмов на Земле
Презентация на тему Разнообразие и распространение организмов на Земле М и М
М и М Презентация на тему Ко Дню Победы
Презентация на тему Ко Дню Победы  Облик современных левых в России Илья Пономарев, Левый Фронт Институт Проблем Глобализации http://ilya-ponomarev.livejournal.com, http://www.kprf.ru/personal/
Облик современных левых в России Илья Пономарев, Левый Фронт Институт Проблем Глобализации http://ilya-ponomarev.livejournal.com, http://www.kprf.ru/personal/ Русская матрешка 1 - 4 класс
Русская матрешка 1 - 4 класс Тёплый дом
Тёплый дом Искусство гжели. Истоки и современное развитие промысла
Искусство гжели. Истоки и современное развитие промысла Цели Стратегии ЦФО: разработка и реализация сбалансированного инвестиционного сценария, который бы учитывал преимущества всех ре
Цели Стратегии ЦФО: разработка и реализация сбалансированного инвестиционного сценария, который бы учитывал преимущества всех ре Постановка бюджетирования в строительных и проектно-ориентированных компанияхНа примере системы управленческого учета и бюджет
Постановка бюджетирования в строительных и проектно-ориентированных компанияхНа примере системы управленческого учета и бюджет Аниме
Аниме Презентация на тему Математика - царица наук
Презентация на тему Математика - царица наук Методы документального контроля. Контрольное сличение остатков. Сравнительный анализ
Методы документального контроля. Контрольное сличение остатков. Сравнительный анализ Безударные гласные в корне
Безударные гласные в корне Основные направления деятельности и перспективы развития Общероссийского отраслевого объединения работодателей электроэнергет
Основные направления деятельности и перспективы развития Общероссийского отраслевого объединения работодателей электроэнергет О результатах деятельности Компании в области охраны атмосферного воздуха в 2006 году и планах на 2007 год
О результатах деятельности Компании в области охраны атмосферного воздуха в 2006 году и планах на 2007 год