- Липецкий государственный технический университет Кафедра прикладной механики

Содержание
- 2. Содержание: 1. План скоростей 2. План ускорений 3. Определение равнодействующих сил инерции 4 Силовой расчет группы
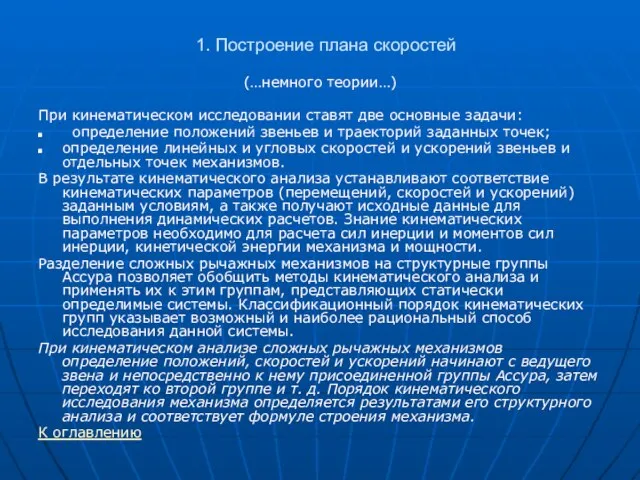
- 3. 1. Построение плана скоростей (…немного теории…) При кинематическом исследовании ставят две основные задачи: определение положений звеньев
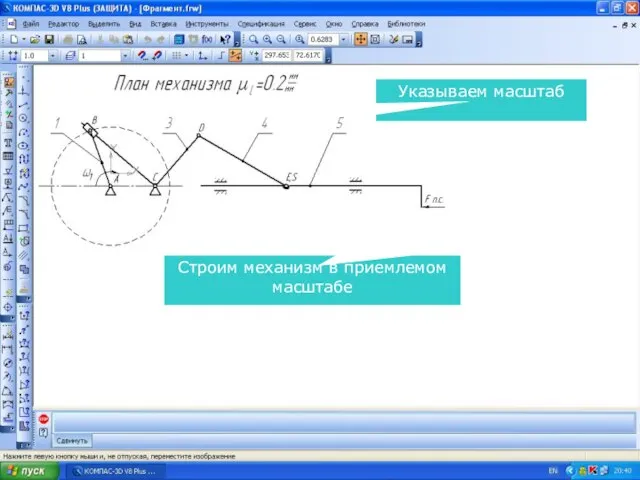
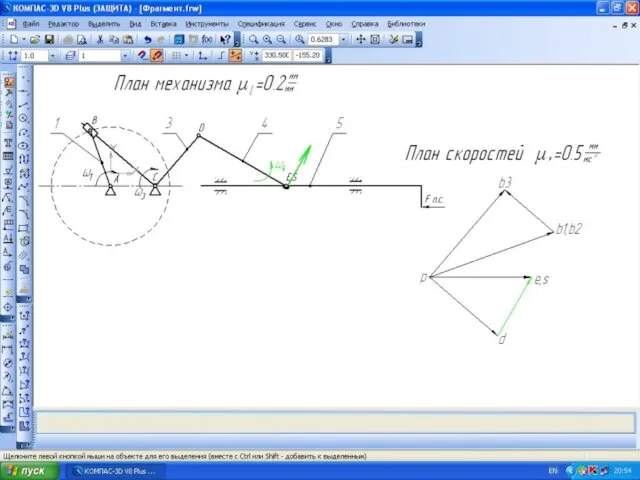
- 4. Строим механизм в приемлемом масштабе Указываем масштаб
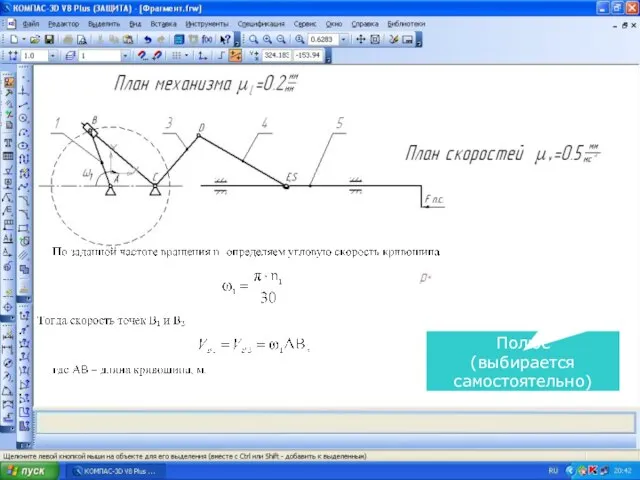
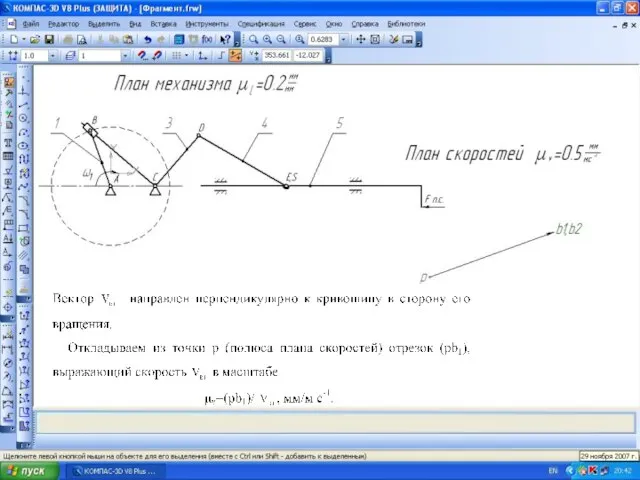
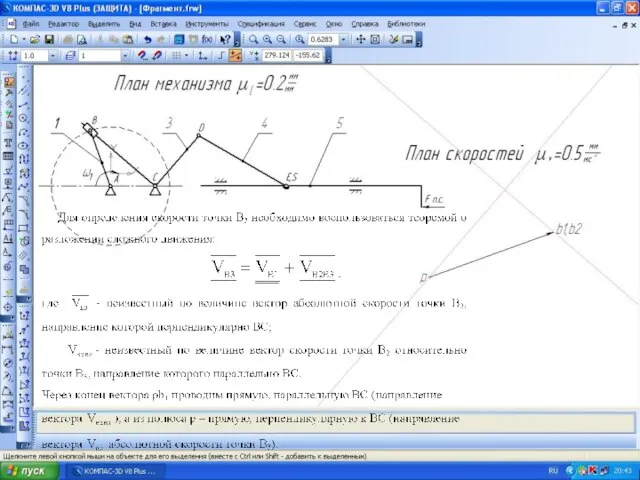
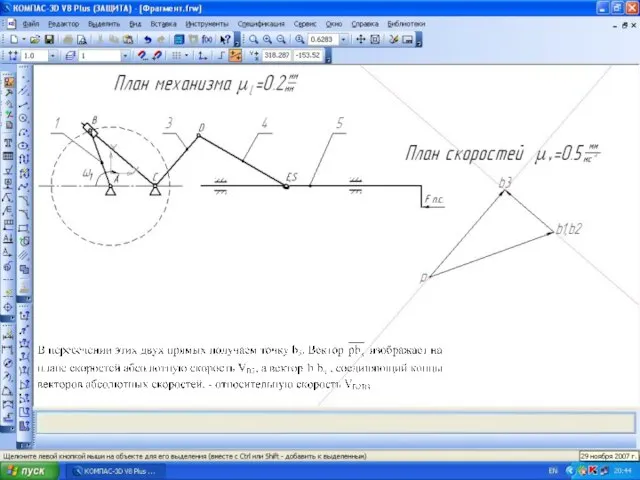
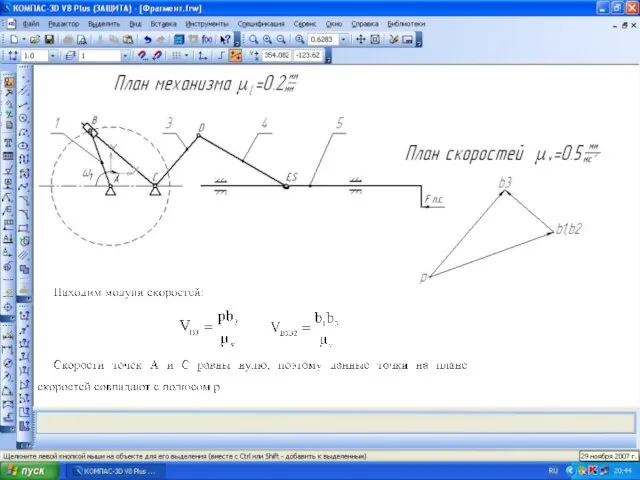
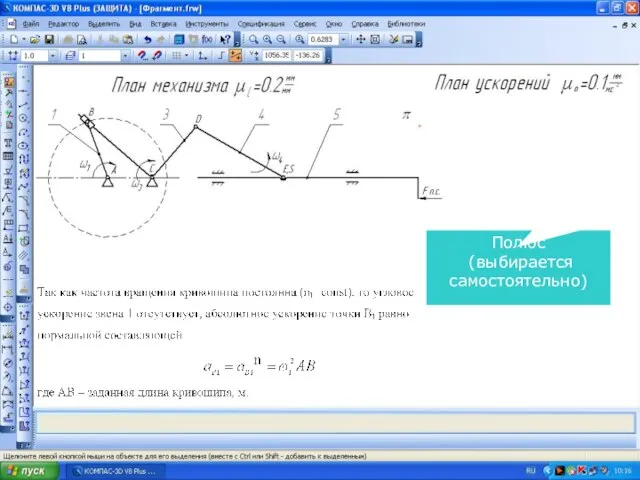
- 5. Полюс (выбирается самостоятельно)
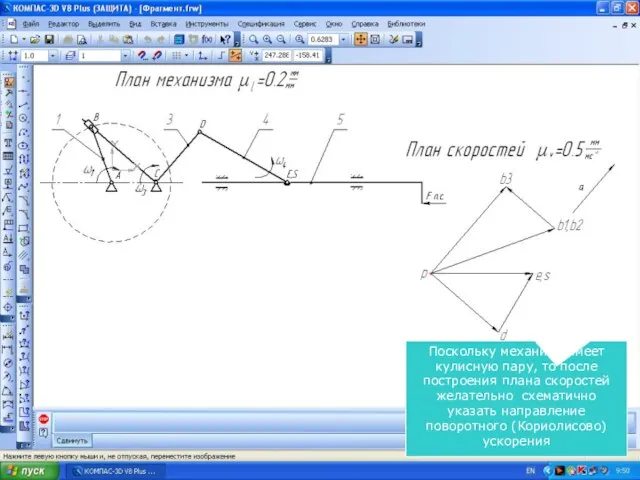
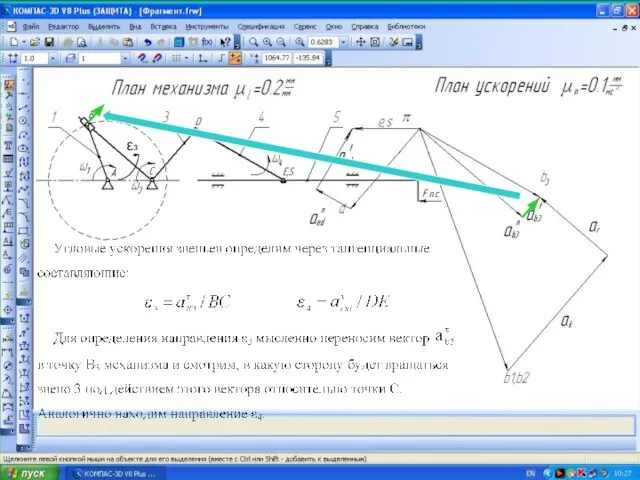
- 21. Поскольку механизм имеет кулисную пару, то после построения плана скоростей желательно схематично указать направление поворотного (Кориолисово)
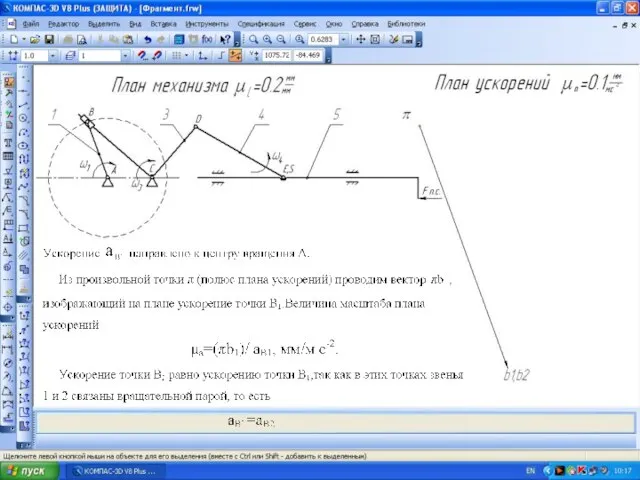
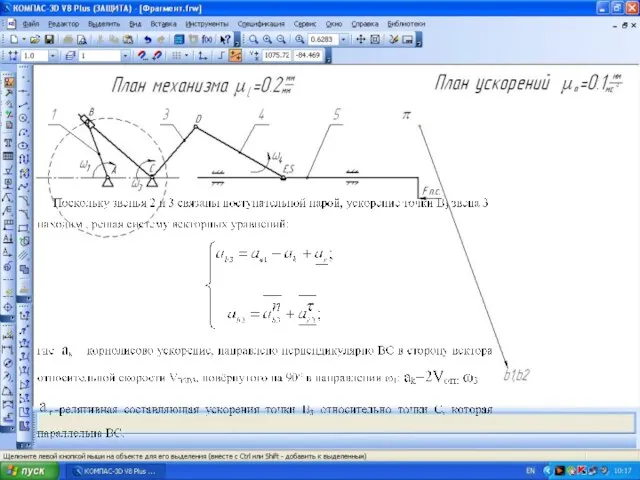
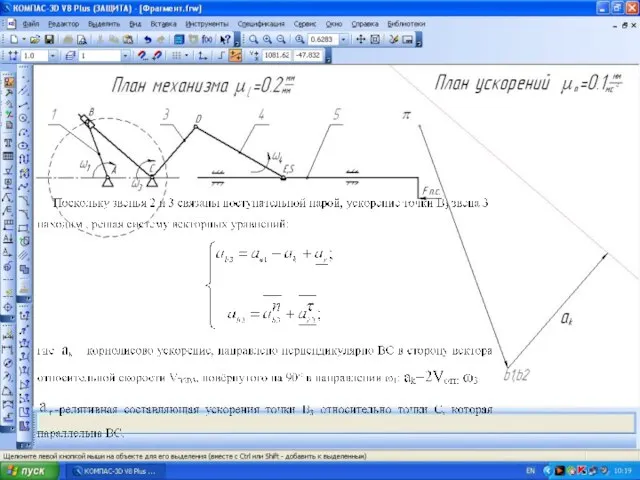
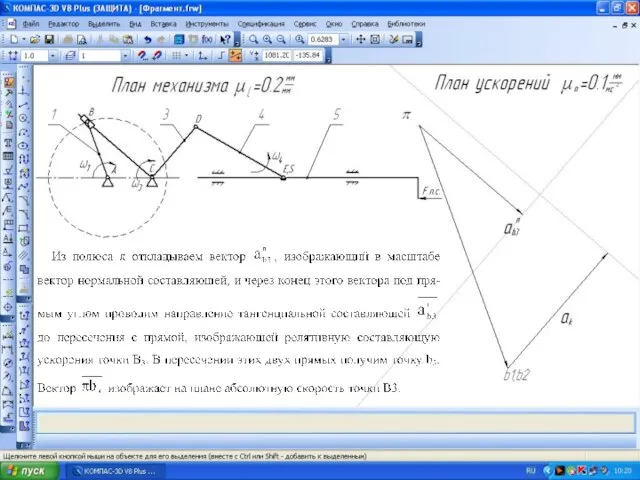
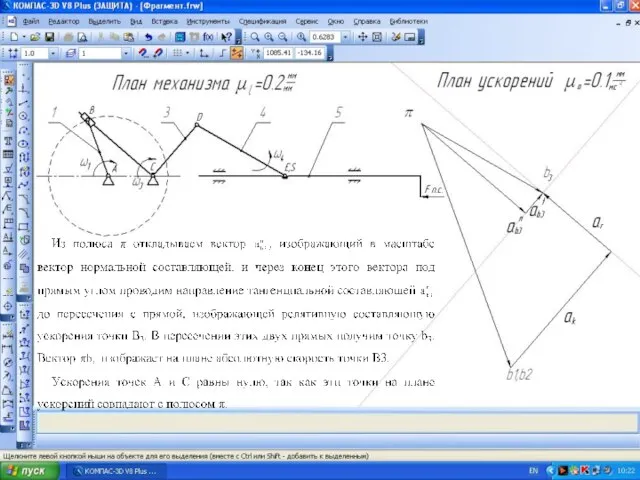
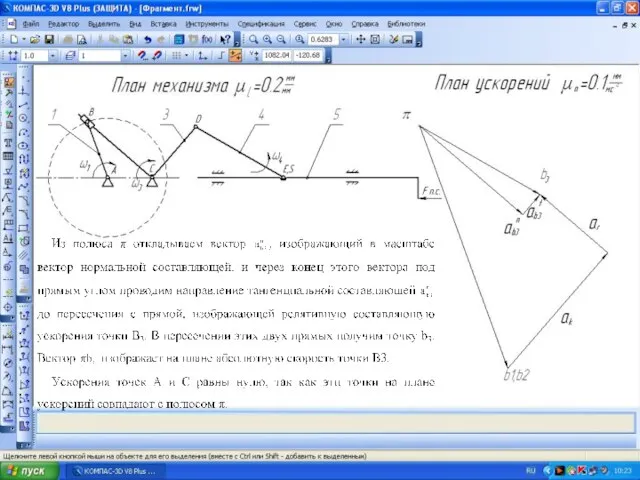
- 22. 2. Построение плана ускорений (…немного теории…) При кинематическом исследовании ставят две основные задачи: определение положений звеньев
- 23. Полюс (выбирается самостоятельно)
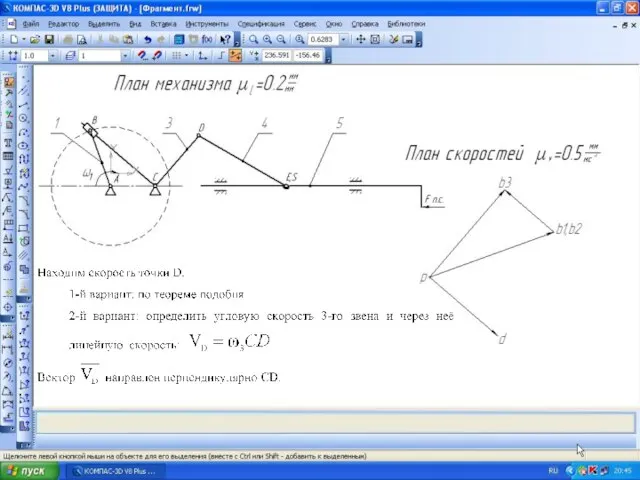
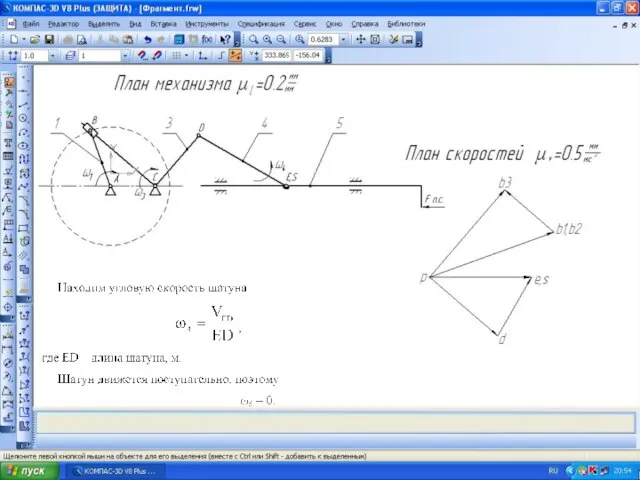
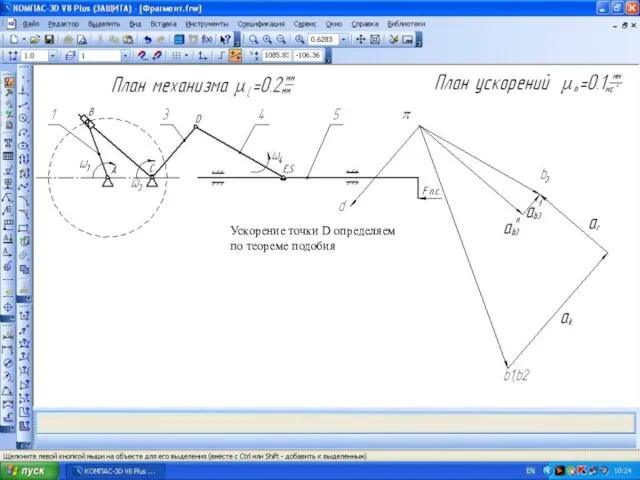
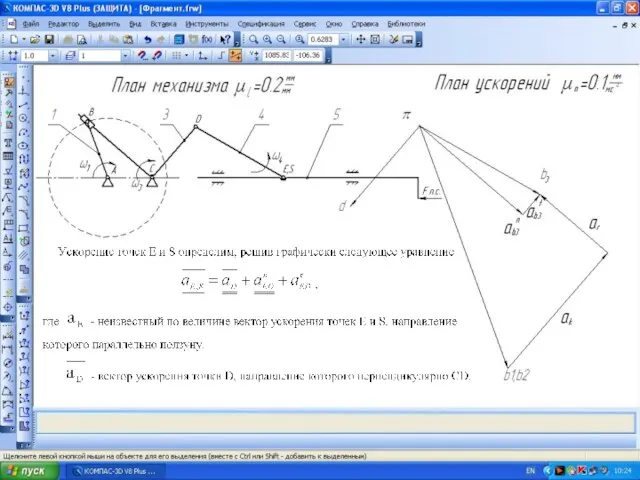
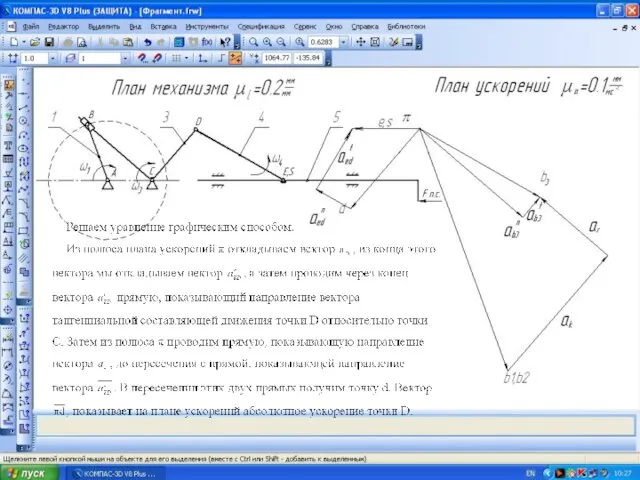
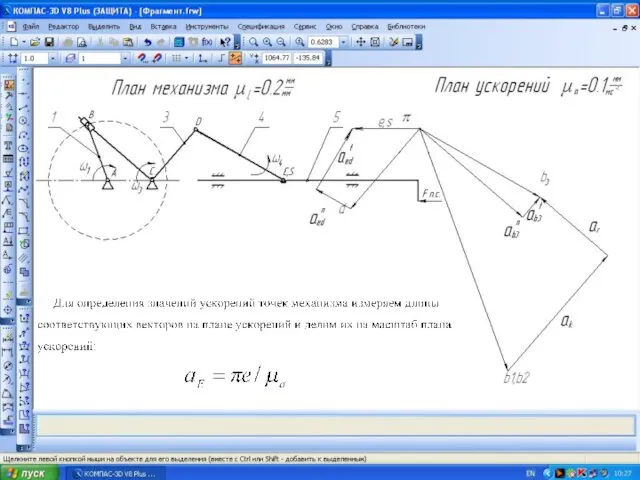
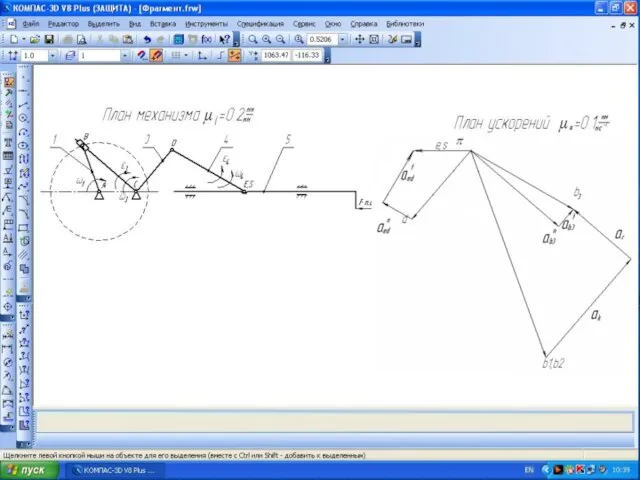
- 30. Ускорение точки D определяем по теореме подобия
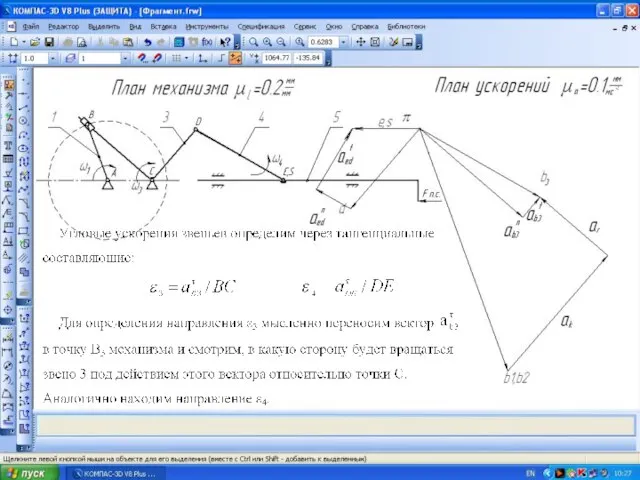
- 36. ε3
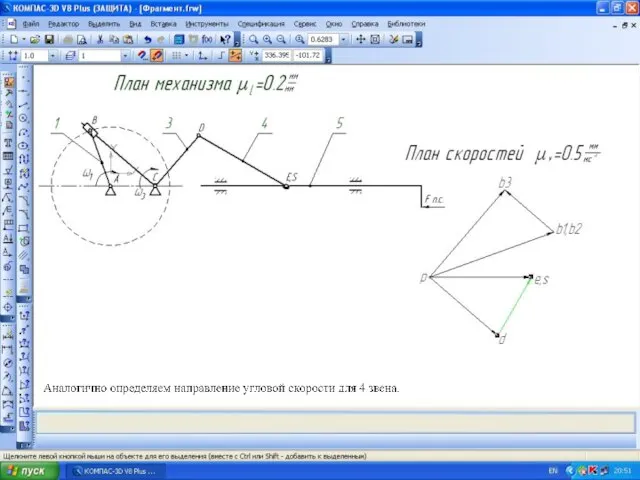
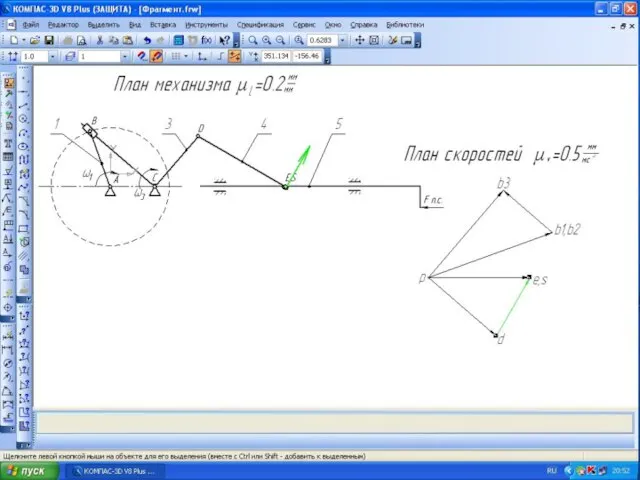
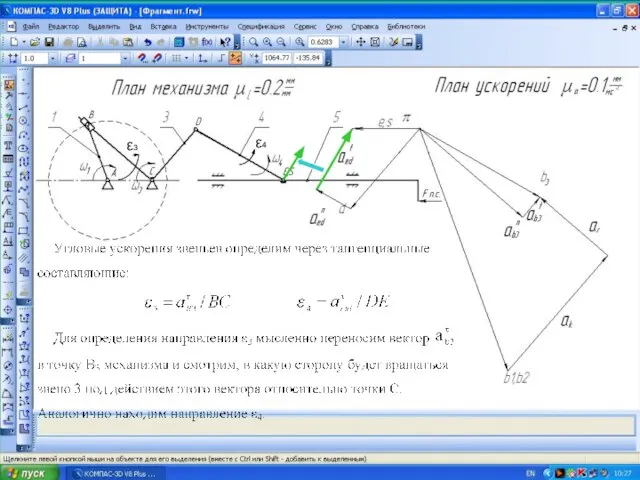
- 37. ε3 ε4
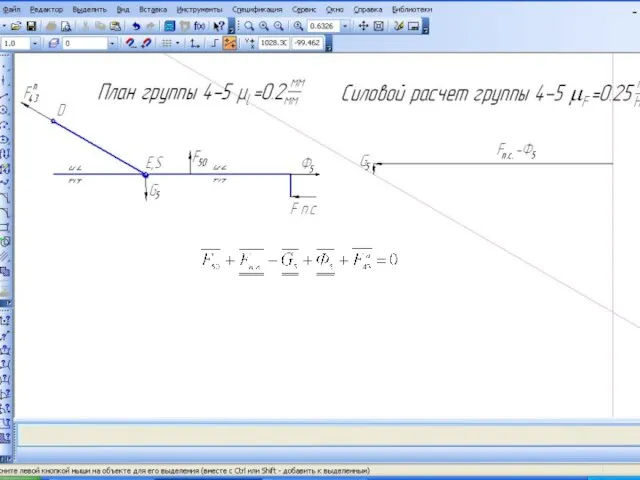
- 39. 3. Определение равнодействующих сил инерции К оглавлению
- 40. СИЛОВОЙ РАСЧЕТ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ Во время движения механизма в его кинематических парах действуют силы, являющиеся
- 41. К оглавлению
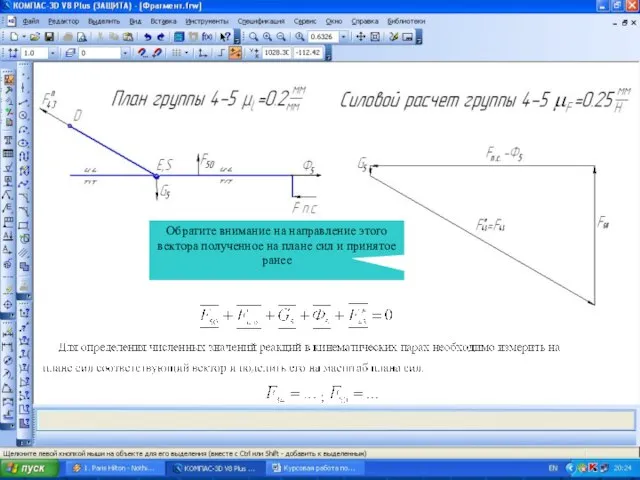
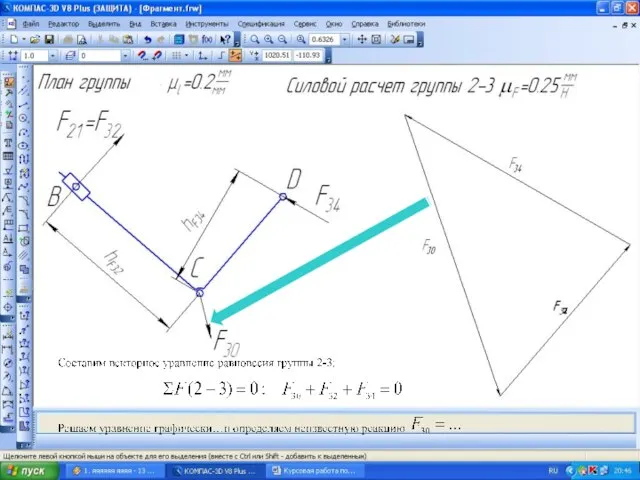
- 45. Обратите внимание на направление этого вектора полученное на плане сил и принятое ранее
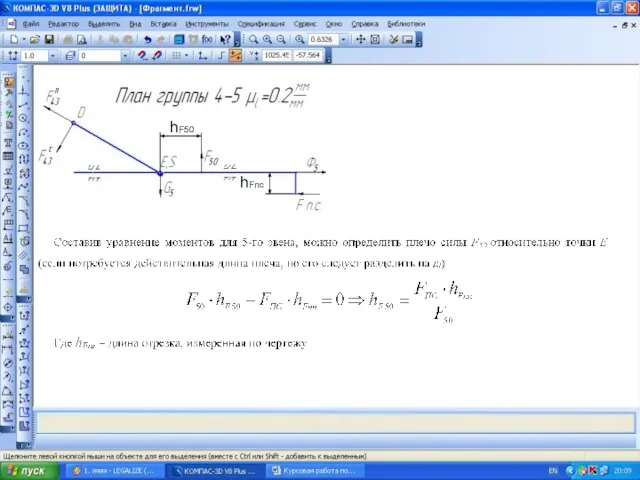
- 46. hFпс hF50
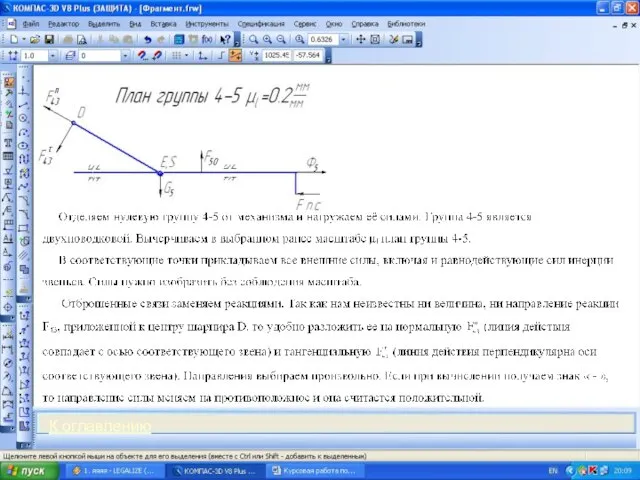
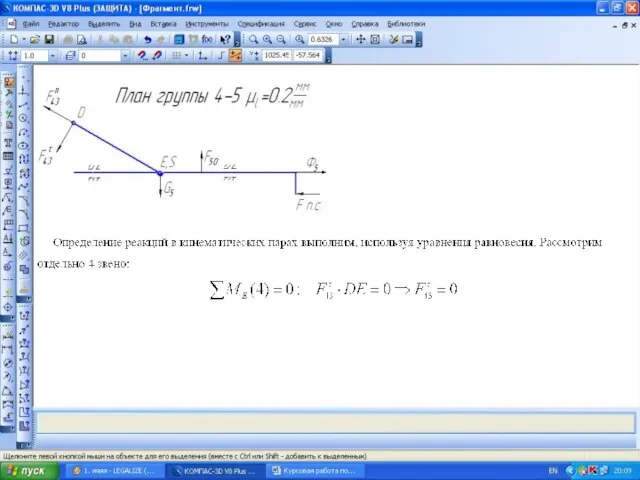
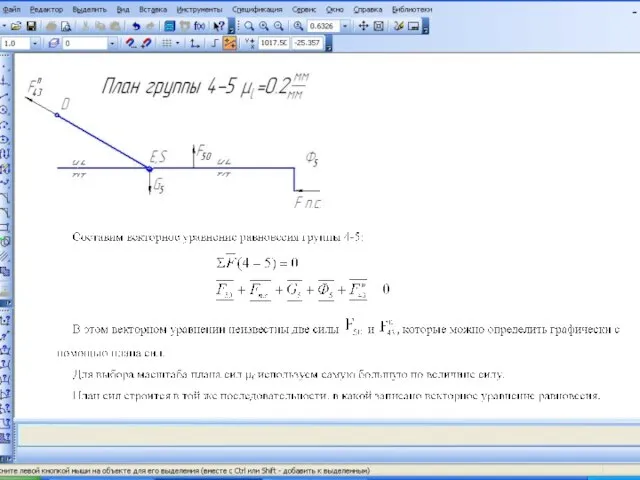
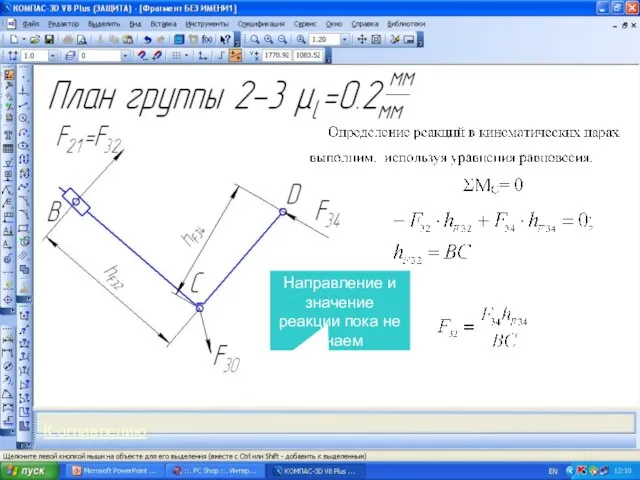
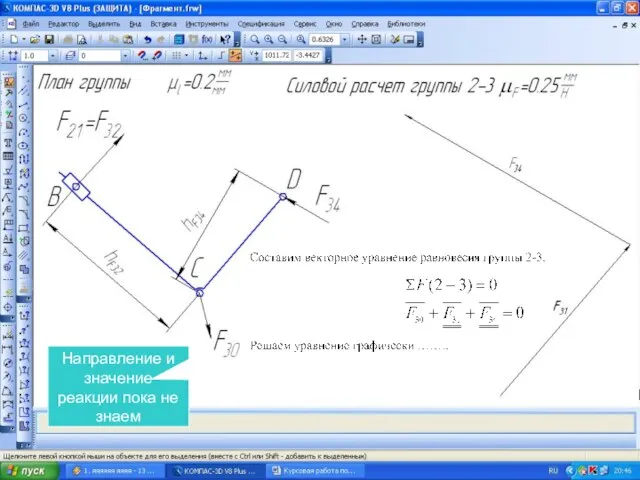
- 47. Направление и значение реакции пока не знаем К оглавлению
- 48. Направление и значение реакции пока не знаем
- 49. 2
- 50. 2 К оглавлению
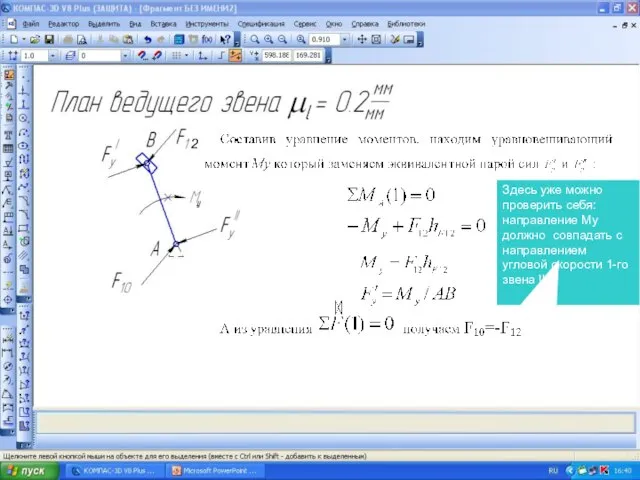
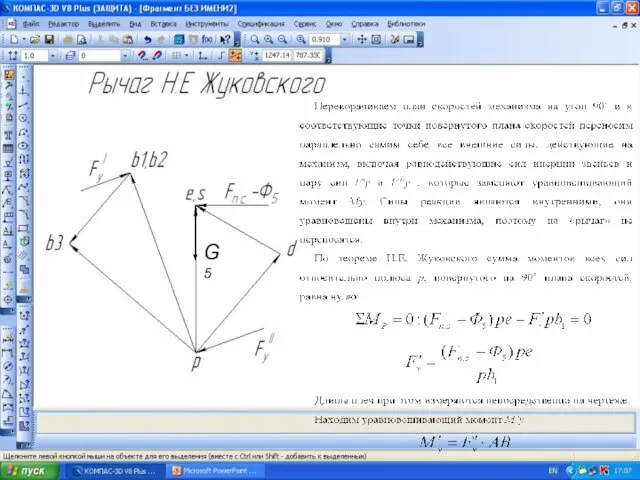
- 51. 2 Здесь уже можно проверить себя: направление Мy должно совпадать с направлением угловой скорости 1-го звена
- 52. К оглавлению
- 53. G5
- 54. G5
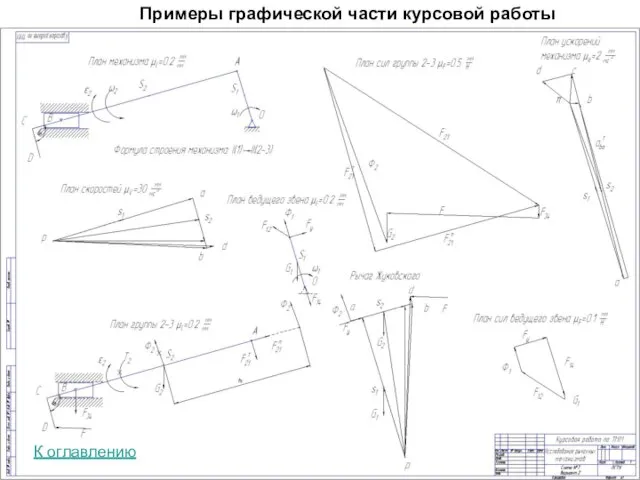
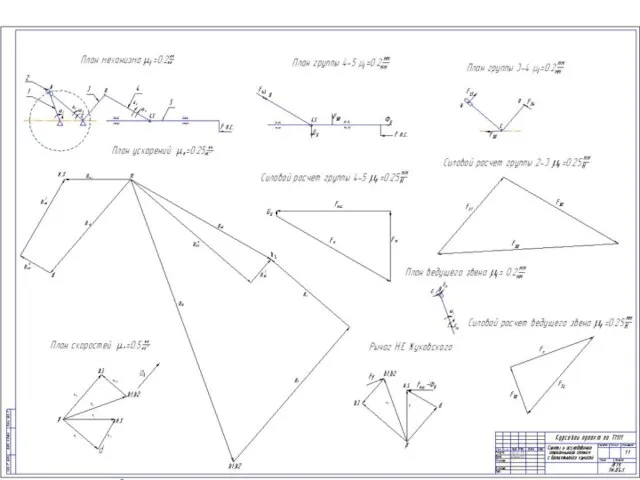
- 55. Примеры графической части курсовой работы К оглавлению
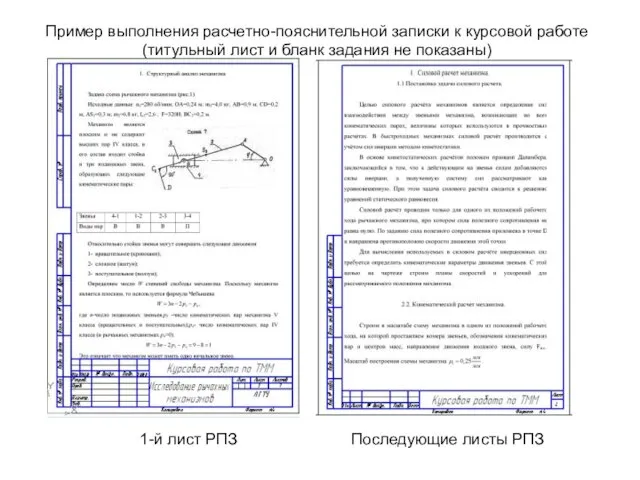
- 56. Пример выполнения расчетно-пояснительной записки к курсовой работе (титульный лист и бланк задания не показаны) 1-й лист
- 58. Литература: 1. Баранцов В.Я. Методическое указание (307) к расчетно-графической работе по курсу «Прикладная механика». – Липецк:
- 60. Скачать презентацию
Слайд 2Содержание:
1. План скоростей
2. План ускорений
3. Определение равнодействующих сил инерции
4 Силовой расчет
Содержание:
1. План скоростей
2. План ускорений
3. Определение равнодействующих сил инерции
4 Силовой расчет
Слайд 31. Построение плана скоростей
(…немного теории…)
При кинематическом исследовании ставят две основные задачи:
определение
1. Построение плана скоростей
(…немного теории…)
При кинематическом исследовании ставят две основные задачи:
определение
Слайд 4Строим механизм в приемлемом масштабе
Указываем масштаб
Строим механизм в приемлемом масштабе
Указываем масштаб
Слайд 5Полюс
(выбирается самостоятельно)
Полюс
(выбирается самостоятельно)

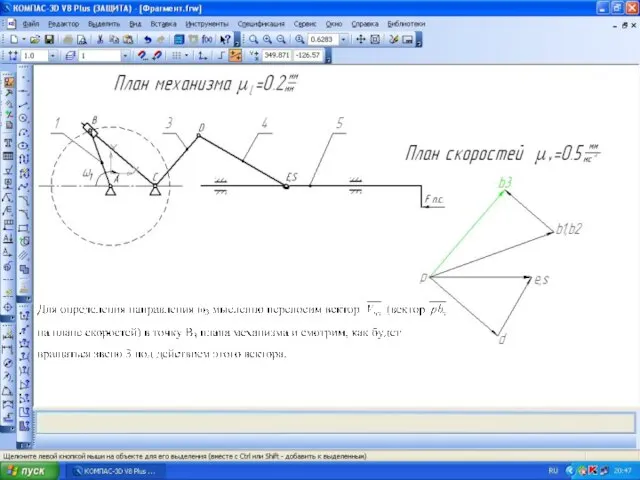
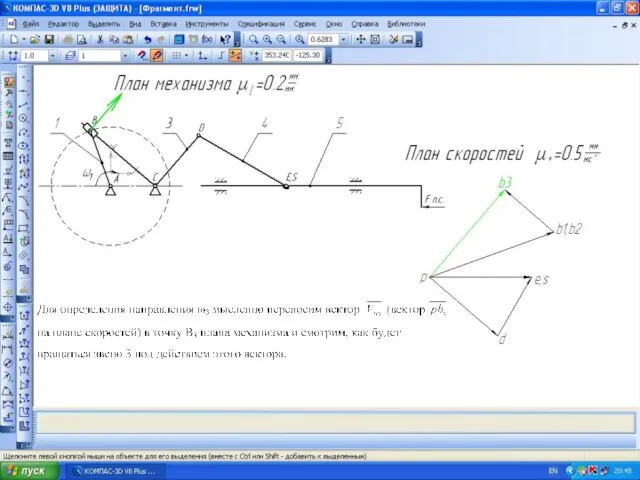
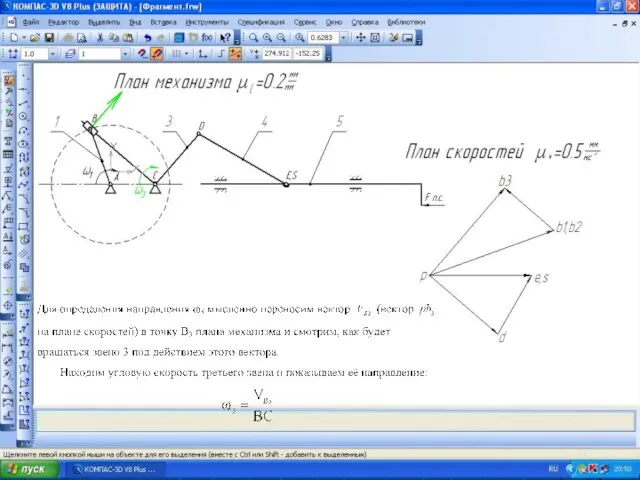
Слайд 21Поскольку механизм имеет кулисную пару, то после построения плана скоростей желательно схематично
Поскольку механизм имеет кулисную пару, то после построения плана скоростей желательно схематично
Слайд 222. Построение плана ускорений
(…немного теории…)
При кинематическом исследовании ставят две основные задачи:
определение
2. Построение плана ускорений
(…немного теории…)
При кинематическом исследовании ставят две основные задачи:
определение
Слайд 23Полюс
(выбирается самостоятельно)
Полюс
(выбирается самостоятельно)
Слайд 30Ускорение точки D определяем
по теореме подобия
Ускорение точки D определяем
по теореме подобия

Слайд 36ε3
ε3
Слайд 37ε3
ε4
ε3
ε4
Слайд 393. Определение равнодействующих сил инерции
К оглавлению
3. Определение равнодействующих сил инерции
К оглавлению
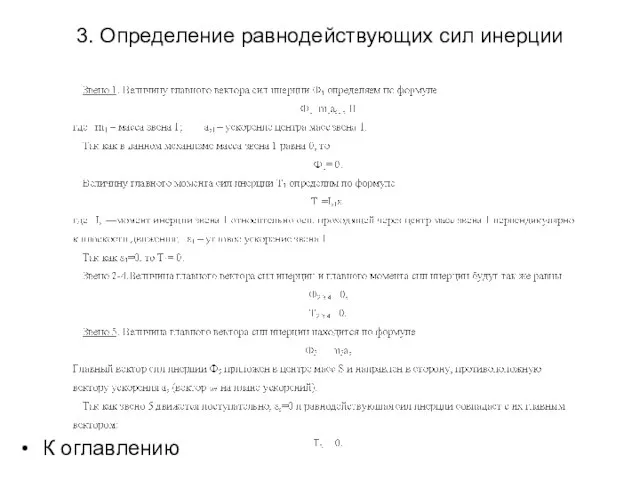
Слайд 40СИЛОВОЙ РАСЧЕТ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
Во время движения механизма в его кинематических парах
СИЛОВОЙ РАСЧЕТ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
Во время движения механизма в его кинематических парах
Слайд 41К оглавлению
К оглавлению
Слайд 45Обратите внимание на направление этого вектора полученное на плане сил и принятое
Обратите внимание на направление этого вектора полученное на плане сил и принятое
Слайд 46hFпс
hF50
hFпс
hF50
Слайд 47Направление и значение реакции пока не знаем
К оглавлению
Направление и значение реакции пока не знаем
К оглавлению
Слайд 48Направление и значение реакции пока не знаем
Направление и значение реакции пока не знаем
Слайд 502
К оглавлению
2
К оглавлению
Слайд 512
Здесь уже можно проверить себя: направление Мy должно совпадать с направлением угловой
2
Здесь уже можно проверить себя: направление Мy должно совпадать с направлением угловой
Слайд 52К оглавлению
К оглавлению

Слайд 53G5
G5
Слайд 54G5
G5
Слайд 55Примеры графической части курсовой работы
К оглавлению
Примеры графической части курсовой работы
К оглавлению
Слайд 56Пример выполнения расчетно-пояснительной записки к курсовой работе
(титульный лист и бланк задания не
Пример выполнения расчетно-пояснительной записки к курсовой работе
(титульный лист и бланк задания не
Слайд 58Литература:
1. Баранцов В.Я. Методическое указание (307) к расчетно-графической работе по курсу «Прикладная
Литература:
1. Баранцов В.Я. Методическое указание (307) к расчетно-графической работе по курсу «Прикладная
 Геофизический мониторинг подводных переходов трубопроводови его информационно-аналитическое обеспечение
Геофизический мониторинг подводных переходов трубопроводови его информационно-аналитическое обеспечение О методах тренировки мышц кистей и предплечий в гиревом спорте
О методах тренировки мышц кистей и предплечий в гиревом спорте Original and delicious cake from the team WERE BORN TO WIN
Original and delicious cake from the team WERE BORN TO WIN Чему учил Китайский мудрец Конфуций
Чему учил Китайский мудрец Конфуций Бизнес-планирование разработки проекта интернет-магазина оптовой торговли на примере ООО Автоснаб
Бизнес-планирование разработки проекта интернет-магазина оптовой торговли на примере ООО Автоснаб Jack London 1876 -1916
Jack London 1876 -1916 Учебный проект
Учебный проект 互联网+教育 以学生为中心、O2O、个性化学习
互联网+教育 以学生为中心、O2O、个性化学习 History of project management. Modern Trends
History of project management. Modern Trends Изобразительно-выразительные возможности морфологических форм и синтаксических конструкций. Анализ художественного текста. Уро
Изобразительно-выразительные возможности морфологических форм и синтаксических конструкций. Анализ художественного текста. Уро Особенности расчёта отпусков и пособий по уходу за ребёнком
Особенности расчёта отпусков и пособий по уходу за ребёнком Дизайн одежды
Дизайн одежды Мотивационная спираль
Мотивационная спираль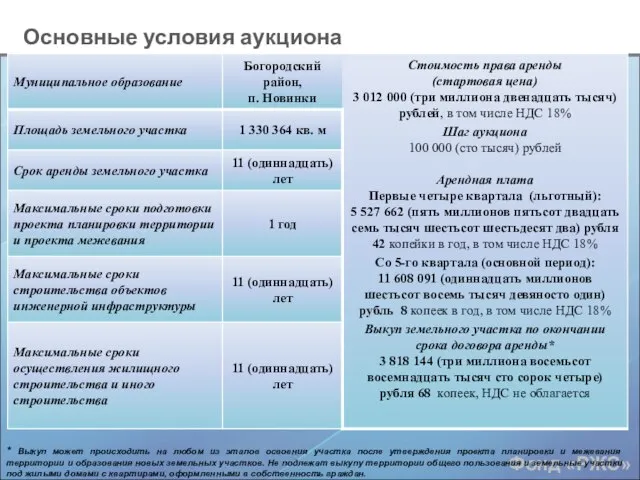 Основные условия аукциона
Основные условия аукциона В одном из самых прекрасных уголков нашего города в селе Красная Воля, расположена школа .Учреждение основано в 1966 году.
В одном из самых прекрасных уголков нашего города в селе Красная Воля, расположена школа .Учреждение основано в 1966 году. Сущность человеческой деятельности
Сущность человеческой деятельности Угольная прокуратура
Угольная прокуратура Текущие предложения по спонсорству спортивных событий
Текущие предложения по спонсорству спортивных событий Мотивация персонала
Мотивация персонала Презентация на тему Дорожная карта по ФГОС
Презентация на тему Дорожная карта по ФГОС ИНТЕРАКТИВНЫЕ WEB-СТРАНИЦЫКАСКАДНЫЕ ТАБЛИЦЫ СТИЛЕЙ (CSS)
ИНТЕРАКТИВНЫЕ WEB-СТРАНИЦЫКАСКАДНЫЕ ТАБЛИЦЫ СТИЛЕЙ (CSS) УВАЖАЕМЫЕ АРЕНДАТОРЫ! - Предлагаем Вашему вниманию уникальную возможность расширить круг своих клиентов, воспользовавшись нашими
УВАЖАЕМЫЕ АРЕНДАТОРЫ! - Предлагаем Вашему вниманию уникальную возможность расширить круг своих клиентов, воспользовавшись нашими Стандарты второго поколения ФГОС
Стандарты второго поколения ФГОС Кредитование. Ипотека
Кредитование. Ипотека Сергей Есенин «Черный человек»
Сергей Есенин «Черный человек» Международно-правовая охрана авторского права
Международно-правовая охрана авторского права Тюменский ГМУ
Тюменский ГМУ Шатровое зодчество Руси
Шатровое зодчество Руси