- Микропроцессорные системы управления устройствами силовой электроники

Содержание
- 2. 1.1. Типовая структура системы автоматического регулирования электроприводом переменного тока Новосибирский Государственный Технический Университет Факультет Радиотехники, Электроники
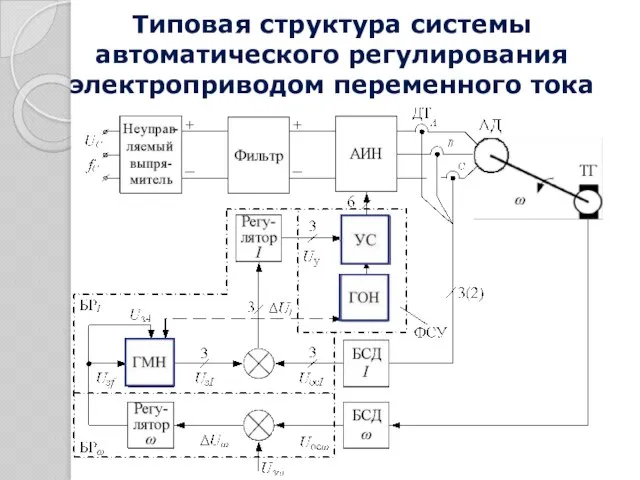
- 3. Типовая структура системы автоматического регулирования электроприводом переменного тока
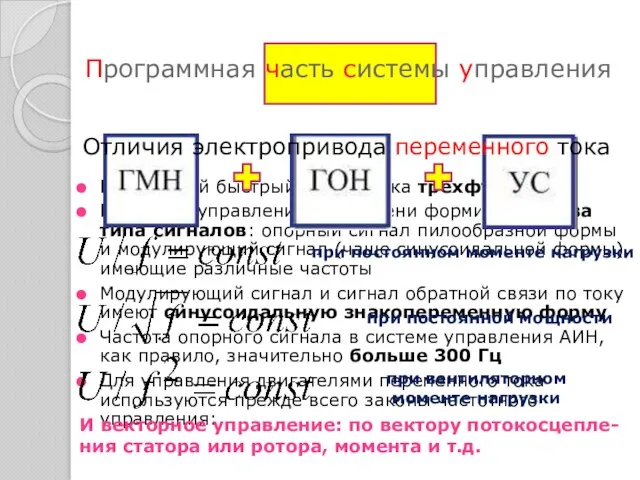
- 4. Программная часть системы управления Внутренний быстрый контур тока трехфазный В системе управления во времени формируются два
- 5. ВЫВОД: Микропроцессор МПСУ АИН должен обладать: разрядностью не менее 16 бит; тактовой частотой не менее 50
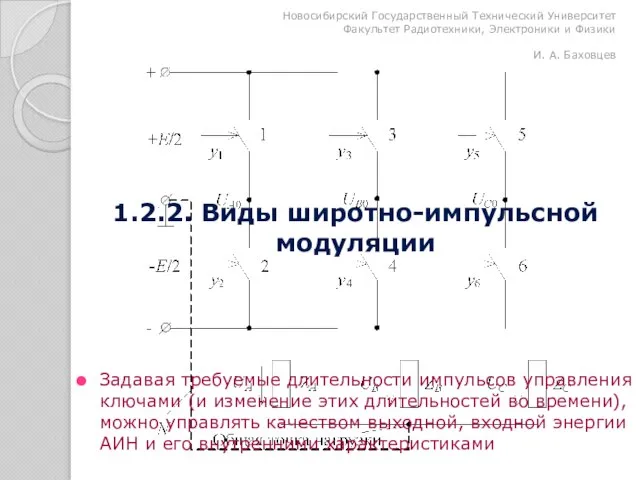
- 6. 1.2. ПРОГРАММНЫЕ СПОСОБЫ УПРАВЛЕНИЯ АИН Новосибирский Государственный Технический Университет Факультет Радиотехники, Электроники и Физики И. А.
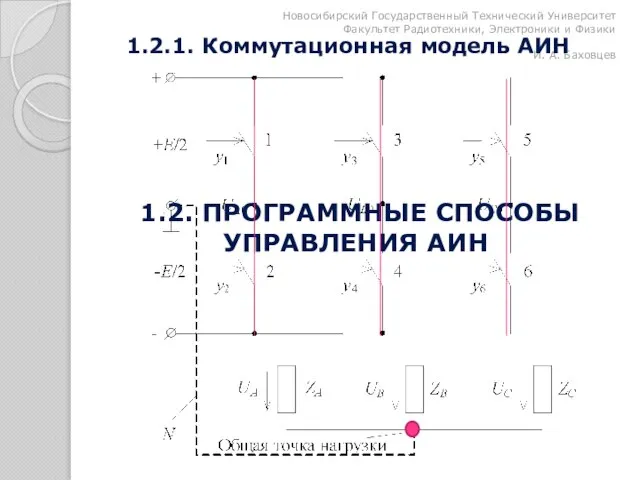
- 7. Коммутационные функции ключей (КФК) Коммутационная модель АИН y1 y3 y5 y2 y4 y6
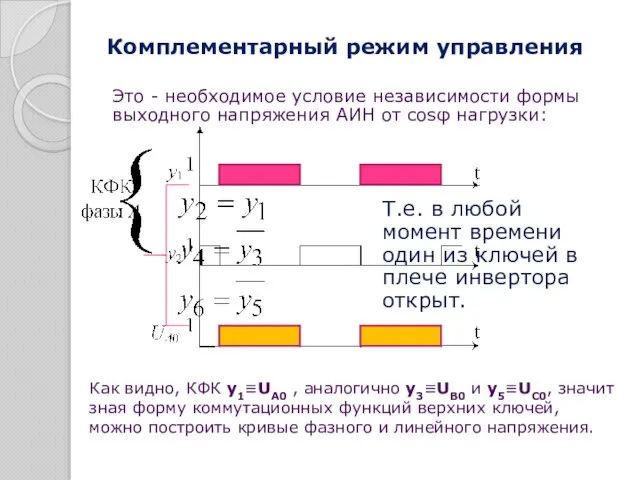
- 8. Комплементарный режим управления Это - необходимое условие независимости формы выходного напряжения АИН от cosφ нагрузки: Т.е.
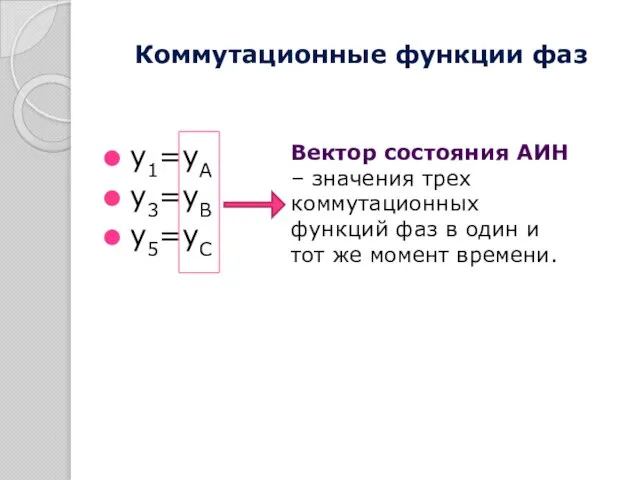
- 9. Коммутационные функции фаз y1=yA y3=yB y5=yC Вектор состояния АИН – значения трех коммутационных функций фаз в
- 10. Задавая требуемые длительности импульсов управления ключами (и изменение этих длительностей во времени), можно управлять качеством выходной,
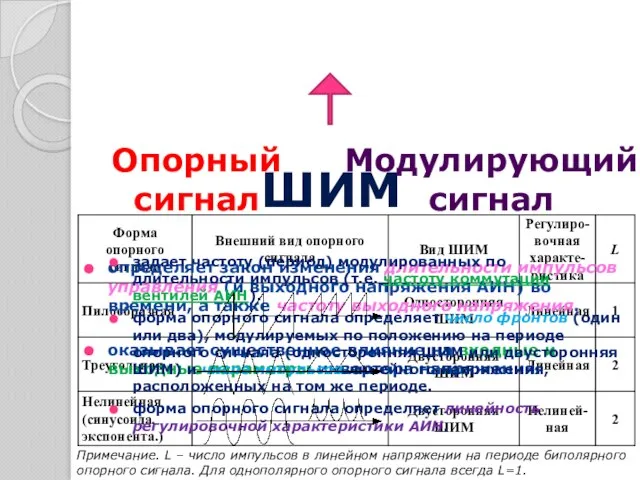
- 11. определяет закон изменения длительности импульсов управления (и выходного напряжения АИН) во времени, а также частоту выходного
- 12. Модулирующий сигнал Опорный сигнал ШИМ Векторные способы гармонический сигнал представляется на комплексной плоскости в виде вращающегося
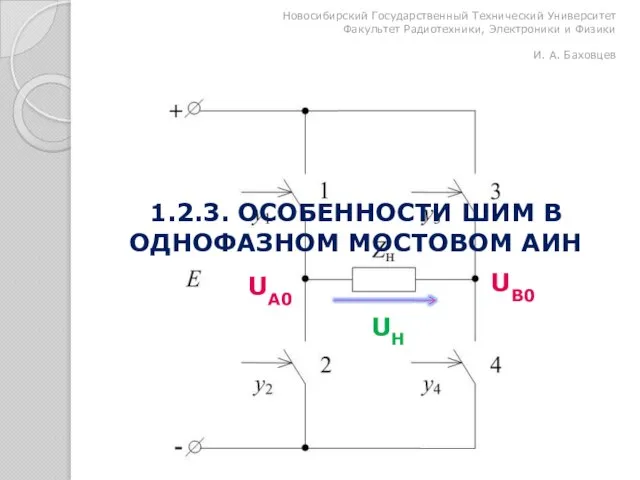
- 13. 1.2.3. ОСОБЕННОСТИ ШИМ В ОДНОФАЗНОМ МОСТОВОМ АИН Новосибирский Государственный Технический Университет Факультет Радиотехники, Электроники и Физики
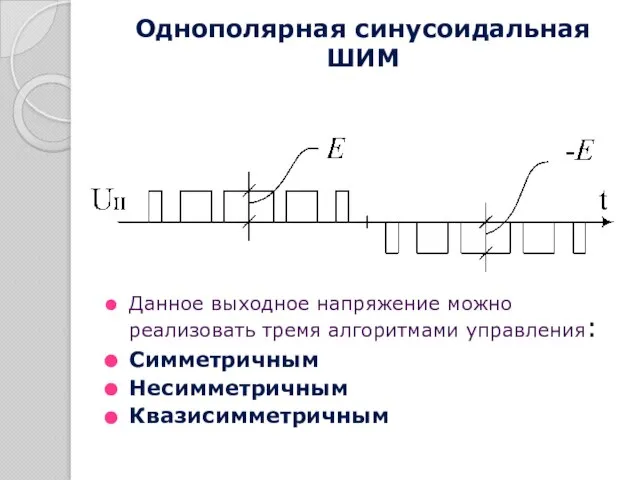
- 14. Однополярная синусоидальная ШИМ Данное выходное напряжение можно реализовать тремя алгоритмами управления: Симметричным Несимметричным Квазисимметричным
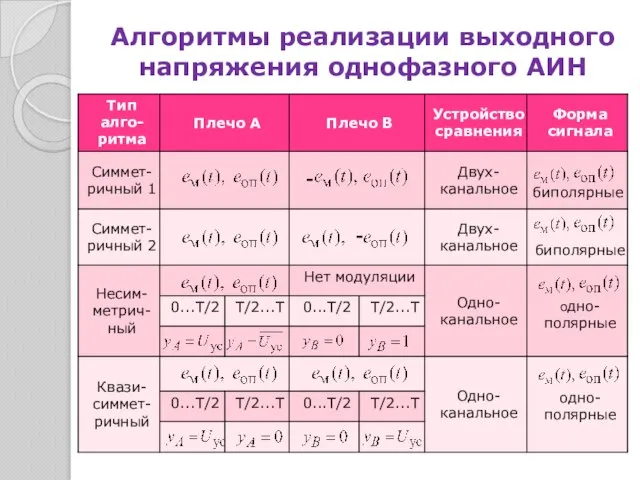
- 15. Алгоритмы реализации выходного напряжения однофазного АИН
- 16. Однополярная синусоидальная ШИМ yA=UA yA=UB yA=UA yA=UB Несиммет-ричное управление Квазисим-метричное управление UН
- 17. Одну и ту же форму выходного напряжения однофазного АИН можно реализовать в системе управления по-разному Это
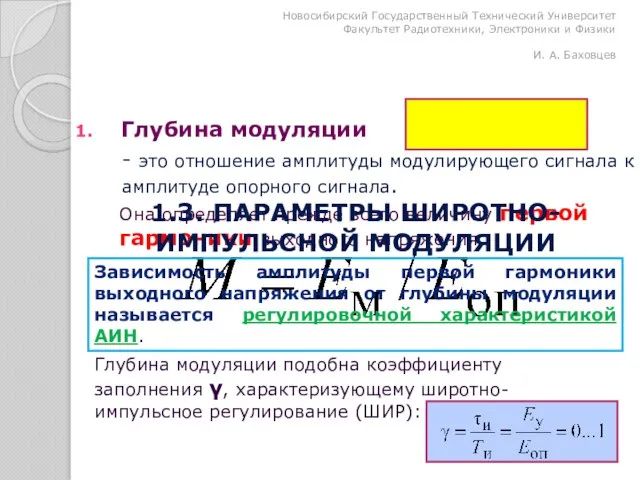
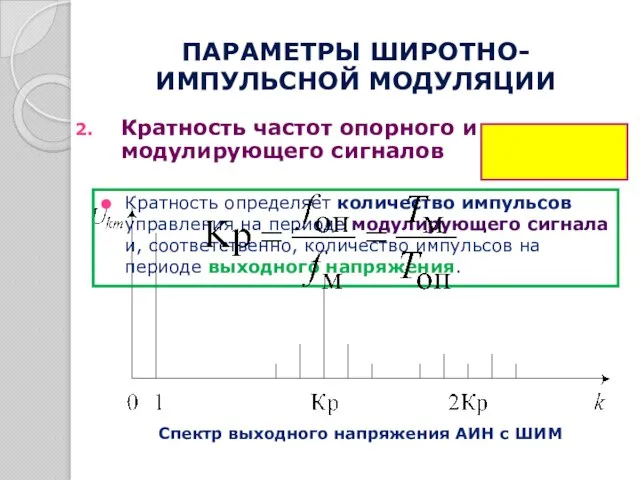
- 18. Она определяет прежде всего величину первой гармоники выходного напряжения Глубина модуляции 1.3. ПАРАМЕТРЫ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИИ Новосибирский
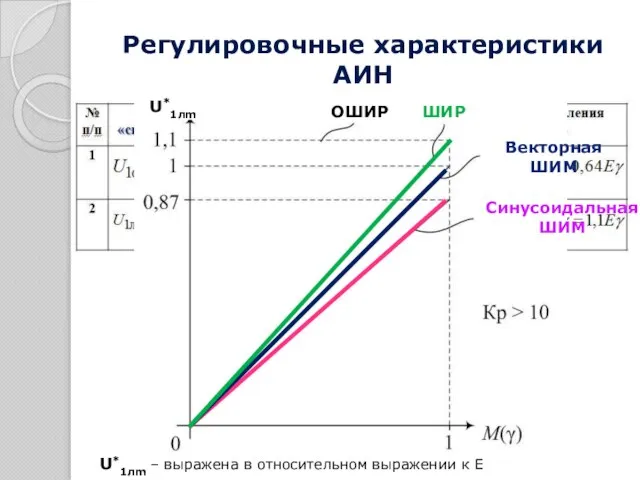
- 19. U*1лm – выражена в относительном выражении к E Регулировочные характеристики АИН ОШИР ШИР Векторная ШИМ Синусоидальная
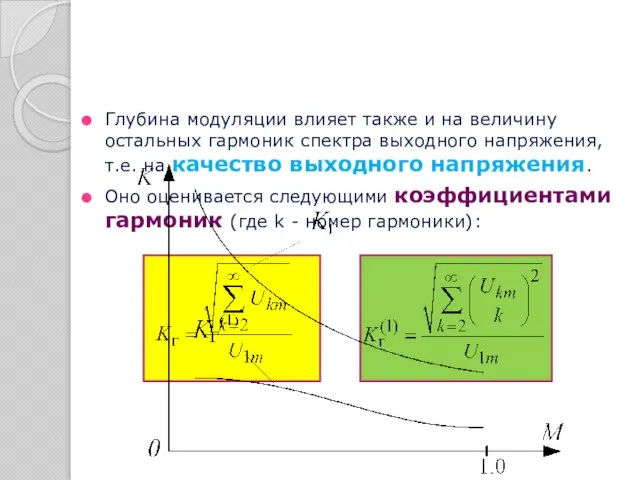
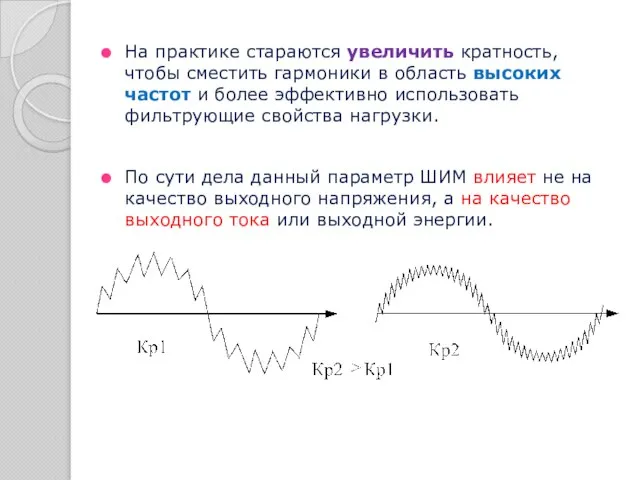
- 20. Глубина модуляции влияет также и на величину остальных гармоник спектра выходного напряжения, т.е. на качество выходного
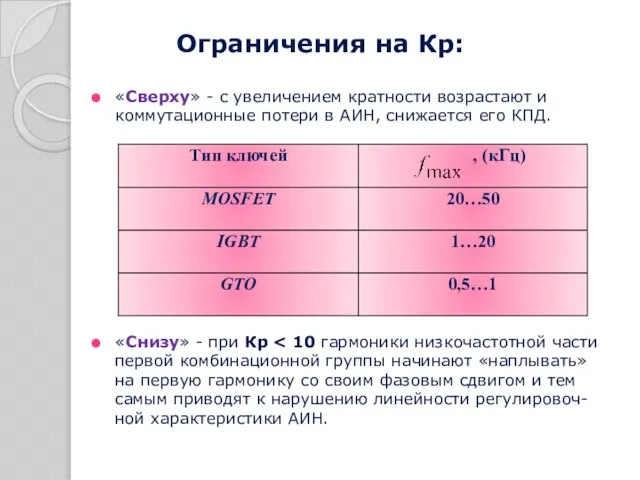
- 21. Кратность определяет количество импульсов управления на периоде модулирующего сигнала и, соответственно, количество импульсов на периоде выходного
- 22. На практике стараются увеличить кратность, чтобы сместить гармоники в область высоких частот и более эффективно использовать
- 23. Ограничения на Кр: «Сверху» - с увеличением кратности возрастают и коммутационные потери в АИН, снижается его
- 24. 1.4. ПРЕДСТАВЛЕНИЕ ГАРМОНИЧЕСКОГО СИГНАЛА В МПСУ Новосибирский Государственный Технический Университет Факультет Радиотехники, Электроники и Физики И.
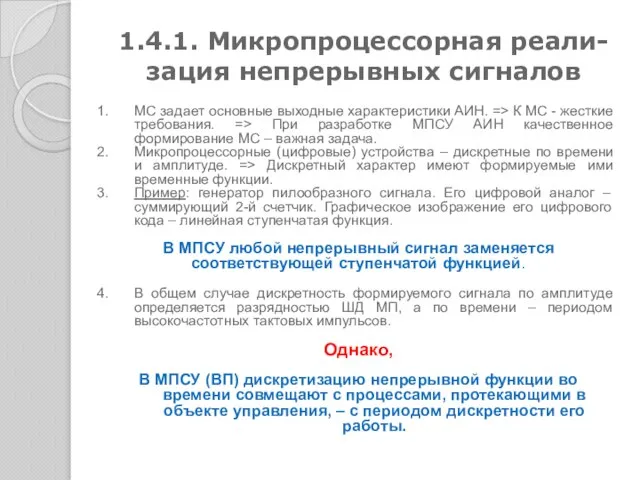
- 25. 1.4.1. Микропроцессорная реали-зация непрерывных сигналов МС задает основные выходные характеристики АИН. => К МС - жесткие
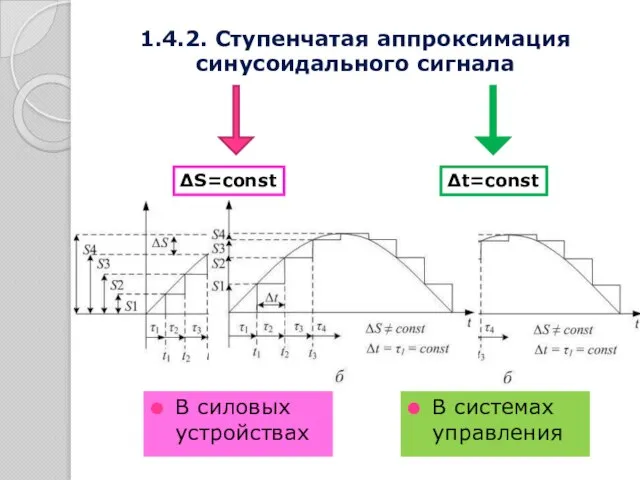
- 26. В силовых устройствах 1.4.2. Ступенчатая аппроксимация синусоидального сигнала ∆S=const ∆t=const В системах управления
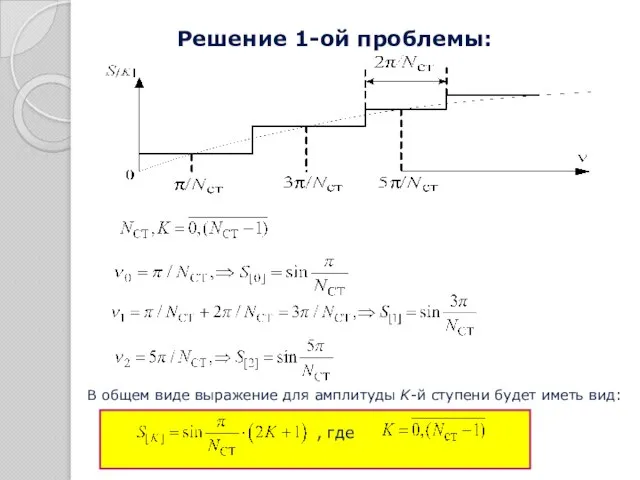
- 27. Проблемы: Первая гармоника ступенчатой функции может отличаться от исходного сигнала как по фазе, так и по
- 28. В общем виде выражение для амплитуды K-й ступени будет иметь вид: Решение 1-ой проблемы: , где
- 30. Скачать презентацию
Слайд 21.1. Типовая структура системы автоматического регулирования электроприводом переменного тока
Новосибирский Государственный Технический Университет
Факультет
1.1. Типовая структура системы автоматического регулирования электроприводом переменного тока
Новосибирский Государственный Технический Университет
Факультет

Слайд 3Типовая структура системы автоматического регулирования электроприводом переменного тока
Типовая структура системы автоматического регулирования электроприводом переменного тока
Слайд 4Программная часть системы управления
Внутренний быстрый контур тока трехфазный
В системе управления во времени
Программная часть системы управления
Внутренний быстрый контур тока трехфазный
В системе управления во времени
Слайд 5 ВЫВОД: Микропроцессор МПСУ АИН
должен обладать:
разрядностью не менее 16 бит;
тактовой частотой
ВЫВОД: Микропроцессор МПСУ АИН
должен обладать:
разрядностью не менее 16 бит;
тактовой частотой
Слайд 6 1.2. ПРОГРАММНЫЕ СПОСОБЫ УПРАВЛЕНИЯ АИН
Новосибирский Государственный Технический Университет
Факультет Радиотехники, Электроники и
1.2. ПРОГРАММНЫЕ СПОСОБЫ УПРАВЛЕНИЯ АИН
Новосибирский Государственный Технический Университет
Факультет Радиотехники, Электроники и
Слайд 7Коммутационные функции ключей (КФК)
Коммутационная модель АИН
y1
y3
y5
y2
y4
y6
Коммутационные функции ключей (КФК)
Коммутационная модель АИН
y1
y3
y5
y2
y4
y6

Слайд 8Комплементарный режим управления
Это - необходимое условие независимости формы выходного напряжения АИН от
Комплементарный режим управления
Это - необходимое условие независимости формы выходного напряжения АИН от
Слайд 9Коммутационные функции фаз
y1=yA
y3=yB
y5=yC
Вектор состояния АИН – значения трех коммутационных функций фаз в
Коммутационные функции фаз
y1=yA
y3=yB
y5=yC
Вектор состояния АИН – значения трех коммутационных функций фаз в
Слайд 10Задавая требуемые длительности импульсов управления ключами (и изменение этих длительностей во времени),
Задавая требуемые длительности импульсов управления ключами (и изменение этих длительностей во времени),
Слайд 11определяет закон изменения длительности импульсов управления (и выходного напряжения АИН) во времени,
определяет закон изменения длительности импульсов управления (и выходного напряжения АИН) во времени,
Слайд 12Модулирующий сигнал
Опорный сигнал
ШИМ
Векторные способы
гармонический сигнал представляется на комплексной плоскости в
Модулирующий сигнал
Опорный сигнал
ШИМ
Векторные способы
гармонический сигнал представляется на комплексной плоскости в

Слайд 131.2.3. ОСОБЕННОСТИ ШИМ В ОДНОФАЗНОМ МОСТОВОМ АИН
Новосибирский Государственный Технический Университет
Факультет Радиотехники, Электроники
1.2.3. ОСОБЕННОСТИ ШИМ В ОДНОФАЗНОМ МОСТОВОМ АИН
Новосибирский Государственный Технический Университет
Факультет Радиотехники, Электроники
Слайд 14Однополярная синусоидальная ШИМ
Данное выходное напряжение можно реализовать тремя алгоритмами управления:
Симметричным
Несимметричным
Квазисимметричным
Однополярная синусоидальная ШИМ
Данное выходное напряжение можно реализовать тремя алгоритмами управления:
Симметричным
Несимметричным
Квазисимметричным
Слайд 15
Алгоритмы реализации выходного напряжения однофазного АИН
Алгоритмы реализации выходного напряжения однофазного АИН
Слайд 16Однополярная синусоидальная ШИМ
yA=UA
yA=UB
yA=UA
yA=UB
Несиммет-ричное управление
Квазисим-метричное управление
UН
Однополярная синусоидальная ШИМ
yA=UA
yA=UB
yA=UA
yA=UB
Несиммет-ричное управление
Квазисим-метричное управление
UН
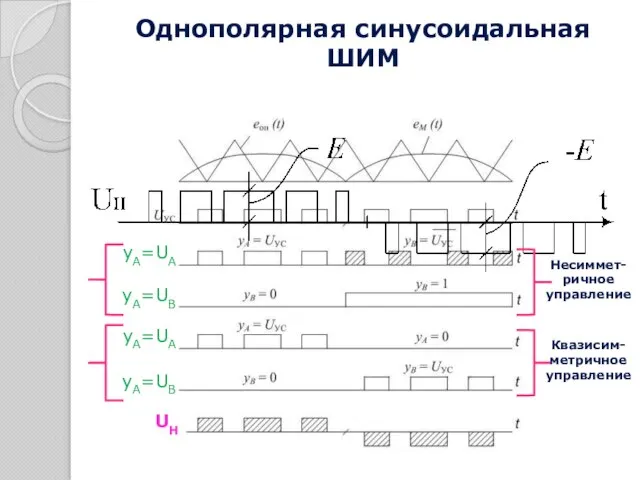
Слайд 17Одну и ту же форму выходного напряжения однофазного АИН можно реализовать в
Одну и ту же форму выходного напряжения однофазного АИН можно реализовать в
Слайд 18Она определяет прежде всего величину первой гармоники выходного напряжения
Глубина модуляции
1.3. ПАРАМЕТРЫ ШИРОТНО-ИМПУЛЬСНОЙ
Она определяет прежде всего величину первой гармоники выходного напряжения
Глубина модуляции
1.3. ПАРАМЕТРЫ ШИРОТНО-ИМПУЛЬСНОЙ
Слайд 19U*1лm – выражена в относительном выражении к E
Регулировочные характеристики АИН
ОШИР
ШИР
Векторная
ШИМ
Синусоидальная
U*1лm – выражена в относительном выражении к E
Регулировочные характеристики АИН
ОШИР
ШИР
Векторная
ШИМ
Синусоидальная
Слайд 20Глубина модуляции влияет также и на величину остальных гармоник спектра выходного напряжения,
Глубина модуляции влияет также и на величину остальных гармоник спектра выходного напряжения,
Слайд 21Кратность определяет количество импульсов управления на периоде модулирующего сигнала и, соответственно, количество
Кратность определяет количество импульсов управления на периоде модулирующего сигнала и, соответственно, количество
Слайд 22На практике стараются увеличить кратность, чтобы сместить гармоники в область высоких частот
На практике стараются увеличить кратность, чтобы сместить гармоники в область высоких частот
Слайд 23Ограничения на Кр:
«Сверху» - с увеличением кратности возрастают и коммутационные потери в
Ограничения на Кр:
«Сверху» - с увеличением кратности возрастают и коммутационные потери в
Слайд 241.4. ПРЕДСТАВЛЕНИЕ ГАРМОНИЧЕСКОГО СИГНАЛА
В МПСУ
Новосибирский Государственный Технический Университет
Факультет Радиотехники, Электроники и
В МПСУ
Новосибирский Государственный Технический Университет Факультет Радиотехники, Электроники и
Слайд 25
1.4.1. Микропроцессорная реали-зация непрерывных сигналов
МС задает основные выходные характеристики АИН. => К
1.4.1. Микропроцессорная реали-зация непрерывных сигналов
МС задает основные выходные характеристики АИН. => К
Слайд 26В силовых устройствах
1.4.2. Ступенчатая аппроксимация синусоидального сигнала
∆S=const
∆t=const
В системах управления
В силовых устройствах
1.4.2. Ступенчатая аппроксимация синусоидального сигнала
∆S=const
∆t=const
В системах управления
Слайд 27Проблемы:
Первая гармоника ступенчатой функции может отличаться от исходного сигнала как по фазе,
Проблемы:
Первая гармоника ступенчатой функции может отличаться от исходного сигнала как по фазе,

Слайд 28В общем виде выражение для амплитуды K-й ступени будет иметь вид:
Решение 1-ой
В общем виде выражение для амплитуды K-й ступени будет иметь вид:
Решение 1-ой
 Обобщающий урок по теме:
Обобщающий урок по теме: Презентация на тему Великие ученые
Презентация на тему Великие ученые Техника безопасности на рабочем месте парикмахера
Техника безопасности на рабочем месте парикмахера Время года - осень
Время года - осень Теория потребительского поведения
Теория потребительского поведения  Бизнес-аналитик. Методист. Домодедово
Бизнес-аналитик. Методист. Домодедово Обучение техники владения ракеткой при игре в бадминтон. Подача волана
Обучение техники владения ракеткой при игре в бадминтон. Подача волана V은/ㄴ 후에
V은/ㄴ 후에 Музыкальное восприятие
Музыкальное восприятие Художественный метод Грибоедова
Художественный метод Грибоедова Личность. Свобода. Ответственность. Личность, содержание понятий индивида
Личность. Свобода. Ответственность. Личность, содержание понятий индивида Обобщение по теме «Водоросли. Особенности строения и жизнедеятельности.»
Обобщение по теме «Водоросли. Особенности строения и жизнедеятельности.» Освободитесь от долгов законно с помощью экспертов федеральной компании по ликвидации долгов
Освободитесь от долгов законно с помощью экспертов федеральной компании по ликвидации долгов Диагноз: неуспеваемость. Причины неуспеваемости и пути преодоления
Диагноз: неуспеваемость. Причины неуспеваемости и пути преодоления Способы организации таможенного контроля
Способы организации таможенного контроля Организация Jeunesse Global
Организация Jeunesse Global Здравствуй
Здравствуй Трудовые правоотношения
Трудовые правоотношения Установление факта владения и пользования недвижимым имуществом
Установление факта владения и пользования недвижимым имуществом Сотрудничество Великобритании и России в кризисное время Ричард Куин-Стэйнли - Советник по вопросам Международной Торговли Торго
Сотрудничество Великобритании и России в кризисное время Ричард Куин-Стэйнли - Советник по вопросам Международной Торговли Торго Наглядное представление рекламного щита
Наглядное представление рекламного щита Презентация на тему Святые Земли Русской. История святых
Презентация на тему Святые Земли Русской. История святых Рынок туристических услуг в Санкт- Петербурге
Рынок туристических услуг в Санкт- Петербурге Градостроительство и архитектура городов Бразилии
Градостроительство и архитектура городов Бразилии Правила и принципы гражданского процесса
Правила и принципы гражданского процесса Школьное ученическое самоуправление «СОВЕТ УЧАЩИХСЯ» Детская общественная организация «ЗВЕЗДА»
Школьное ученическое самоуправление «СОВЕТ УЧАЩИХСЯ» Детская общественная организация «ЗВЕЗДА» Коррупция
Коррупция Фирма в условиях совершенной конкуренции
Фирма в условиях совершенной конкуренции