- Монтаж СП с помощью лазерного трекера LTD-600

Содержание
- 2. Рама приспособления 1 - сваренная рама; 2 – четыре базовых отверстия. При монтаже сборочного приспособления с
- 3. 1 – каркас приспособления; 2 – стойки приспособления; 3 – отражатель TBR (монтажная марка); 4 –
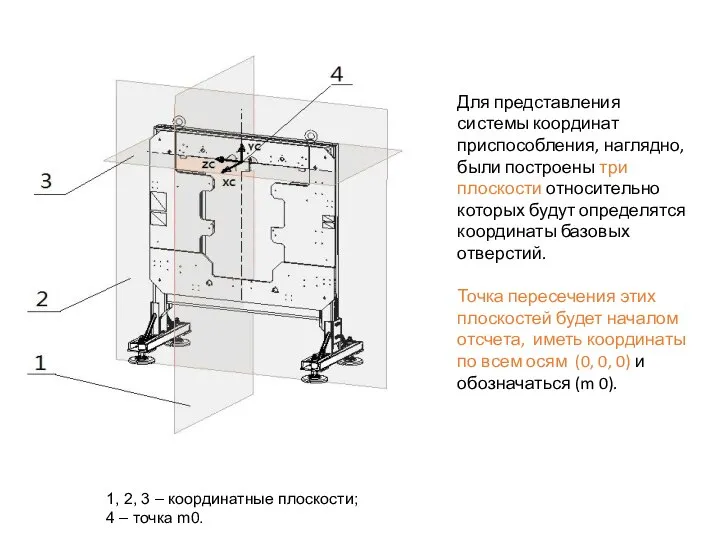
- 4. 1, 2, 3 – координатные плоскости; 4 – точка m0. Для представления системы координат приспособления, наглядно,
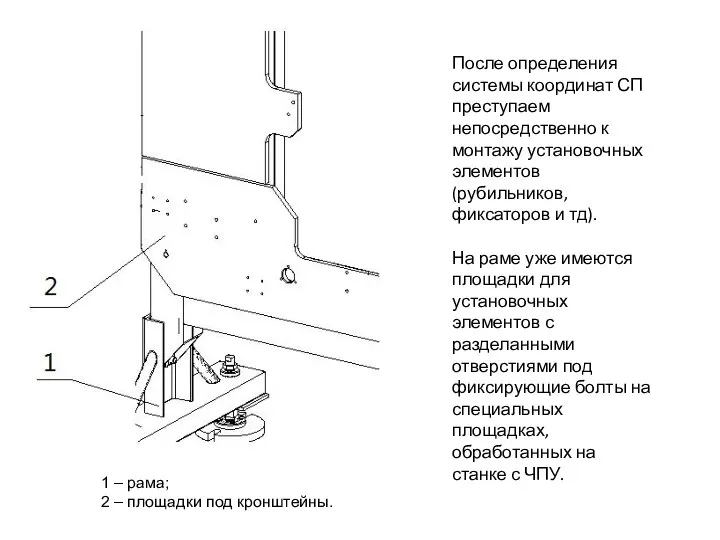
- 5. 1 – рама; 2 – площадки под кронштейны. После определения системы координат СП преступаем непосредственно к
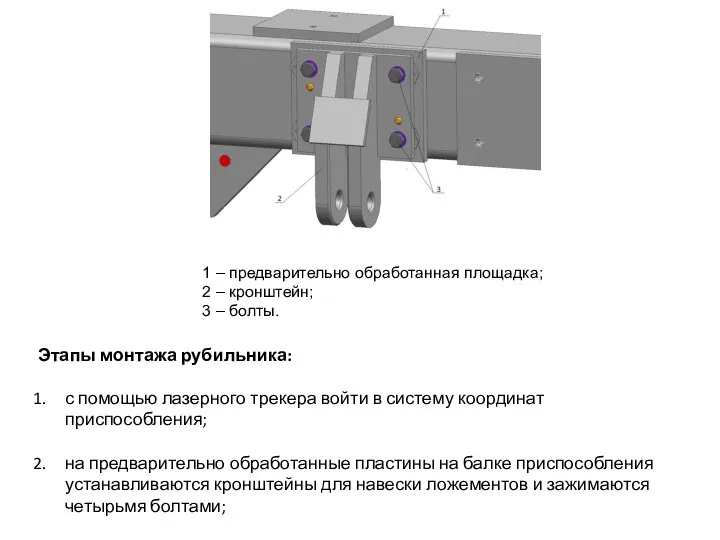
- 6. 1 – предварительно обработанная площадка; 2 – кронштейн; 3 – болты. Этапы монтажа рубильника: с помощью
- 7. 1 – рубильник; 2 – кронштейн; 3 – отражатели. на кронштейны навешиваются рубильники, в которые устанавливаются
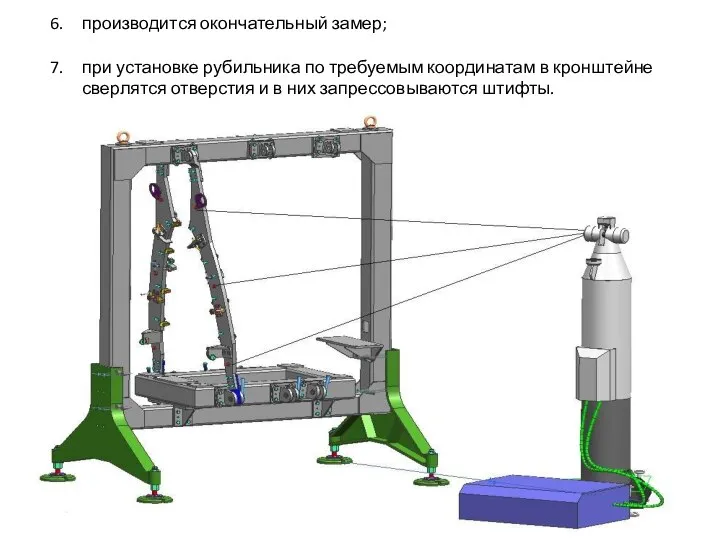
- 8. производится окончательный замер; при установке рубильника по требуемым координатам в кронштейне сверлятся отверстия и в них
- 10. Скачать презентацию

Слайд 31 – каркас приспособления;
2 – стойки приспособления;
3 – отражатель TBR
1 – каркас приспособления;
2 – стойки приспособления;
3 – отражатель TBR

Слайд 41, 2, 3 – координатные плоскости;
4 – точка m0.
Для представления системы
1, 2, 3 – координатные плоскости;
4 – точка m0.
Для представления системы
Слайд 51 – рама;
2 – площадки под кронштейны.
После определения системы координат
1 – рама;
2 – площадки под кронштейны.
После определения системы координат
Слайд 61 – предварительно обработанная площадка;
2 – кронштейн;
3 – болты.
Этапы
1 – предварительно обработанная площадка;
2 – кронштейн;
3 – болты.
Этапы
Слайд 71 – рубильник;
2 – кронштейн;
3 – отражатели.
на кронштейны навешиваются
1 – рубильник;
2 – кронштейн;
3 – отражатели.
на кронштейны навешиваются

Слайд 8производится окончательный замер;
при установке рубильника по требуемым координатам в кронштейне сверлятся отверстия
производится окончательный замер;
при установке рубильника по требуемым координатам в кронштейне сверлятся отверстия
 Эффективные маркетинговые коммуникации в менеджменте
Эффективные маркетинговые коммуникации в менеджменте  houston
houston Светлой памяти А. Миронова. Все главы
Светлой памяти А. Миронова. Все главы Топонимика – это
Топонимика – это Культура Шумера
Культура Шумера Программа развития ИВС СГТУ
Программа развития ИВС СГТУ Отряд Полужесткокрылых
Отряд Полужесткокрылых Общая и профессиональная культура педагога
Общая и профессиональная культура педагога Lola Rennt (1998)
Lola Rennt (1998) Антикризисные стратегии. Новые возможности и перспективы
Антикризисные стратегии. Новые возможности и перспективы Черный квадрат
Черный квадрат АИС Вывески, рекламные конструкции
АИС Вывески, рекламные конструкции Детали кроя изделий
Детали кроя изделий Наглядная геометрия
Наглядная геометрия условный оператор
условный оператор Презентация на тему Влажные экваториальные леса
Презентация на тему Влажные экваториальные леса Who helped Morse develop the code
Who helped Morse develop the code Click to edit Master title style Click to edit Master subtitle style
Click to edit Master title style Click to edit Master subtitle style  Наука в современном обществе
Наука в современном обществе Проблема наркомании
Проблема наркомании МОДЕЛЬ СОЦИАЛЬНО-ДЕМОГРАФИЧЕСКОГО РАЗВИТИЯ МУНИЦИПАЛЬНОГО ОБРАЗОВАНИЯ ГОРОД НОРИЛЬСК. Основные подходы. Проектные тезисы. Презе
МОДЕЛЬ СОЦИАЛЬНО-ДЕМОГРАФИЧЕСКОГО РАЗВИТИЯ МУНИЦИПАЛЬНОГО ОБРАЗОВАНИЯ ГОРОД НОРИЛЬСК. Основные подходы. Проектные тезисы. Презе Отчет о реализованных проектах 2019-2020 гг. Трубичинское поселение
Отчет о реализованных проектах 2019-2020 гг. Трубичинское поселение Детские игры
Детские игры Исследование разгонного потенциала современных процессоров
Исследование разгонного потенциала современных процессоров Презентация на тему Принцип разделения властей
Презентация на тему Принцип разделения властей Международная газета «Секретные материалы 20 века»
Международная газета «Секретные материалы 20 века» А.П.Чехов – несравненный художник жизни
А.П.Чехов – несравненный художник жизни Энергетические рынки
Энергетические рынки