- Написание программ для робота Пропорциональный регулятор

Содержание
- 2. Написание программ для робота Пропорциональный регулятор. Подбор коэффициентов регулятора
- 3. Типы регуляторов Релейные Пропорциональные Кубические Пропорционально-дифференциальные Пропорционально-интегрально-дифференциальные
- 4. Регуляторы Пропорциональный Скорость двигателей изменяется пропорционально отклонению робота от центра линии VL = V0+k ΔX –
- 5. Скачать среду программирования TRIK Studio (если не установлена) Сайт для загрузки: https://trikset.com/products/trik-studio Запустить загруженный файл. Установить
- 7. Скачать презентацию
Слайд 3
Типы регуляторов
Релейные
Пропорциональные
Кубические
Пропорционально-дифференциальные
Пропорционально-интегрально-дифференциальные
Типы регуляторов
Релейные
Пропорциональные
Кубические
Пропорционально-дифференциальные
Пропорционально-интегрально-дифференциальные
Слайд 4
Регуляторы
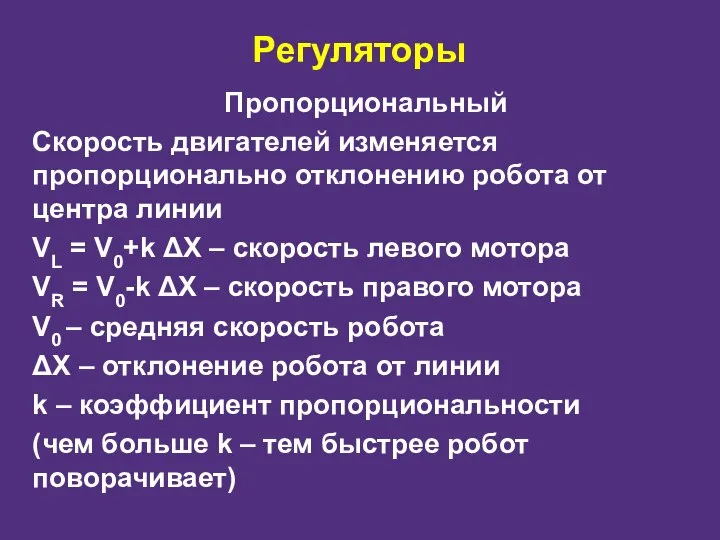
Пропорциональный
Скорость двигателей изменяется пропорционально отклонению робота от центра линии
VL = V0+k ΔX
Регуляторы
Пропорциональный
Скорость двигателей изменяется пропорционально отклонению робота от центра линии
VL = V0+k ΔX
Слайд 5
Скачать среду программирования TRIK Studio (если не установлена)
Сайт для загрузки:
https://trikset.com/products/trik-studio
Запустить загруженный файл.
Скачать среду программирования TRIK Studio (если не установлена)
Сайт для загрузки:
https://trikset.com/products/trik-studio
Запустить загруженный файл.
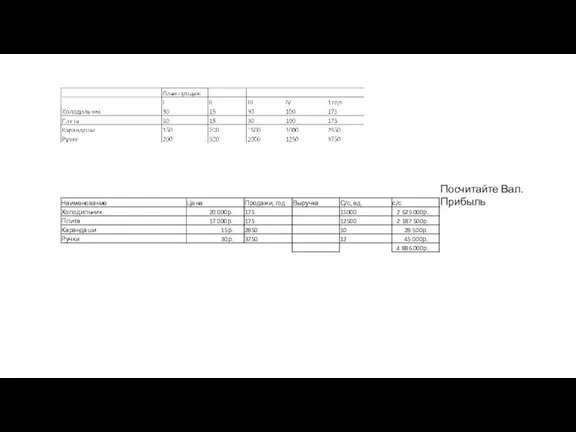 Срок окупаемости
Срок окупаемости Ветеринарна фармакологія. Препарати важких металів і арсену. Лікарські барвники
Ветеринарна фармакологія. Препарати важких металів і арсену. Лікарські барвники Романтизм в искусстве
Романтизм в искусстве Конституционное право РФ как наука и отрасль права
Конституционное право РФ как наука и отрасль права Эзопов язык
Эзопов язык Умножение и деление на однозначное число
Умножение и деление на однозначное число Фиксация и описание термических поражений материалов и конструкций
Фиксация и описание термических поражений материалов и конструкций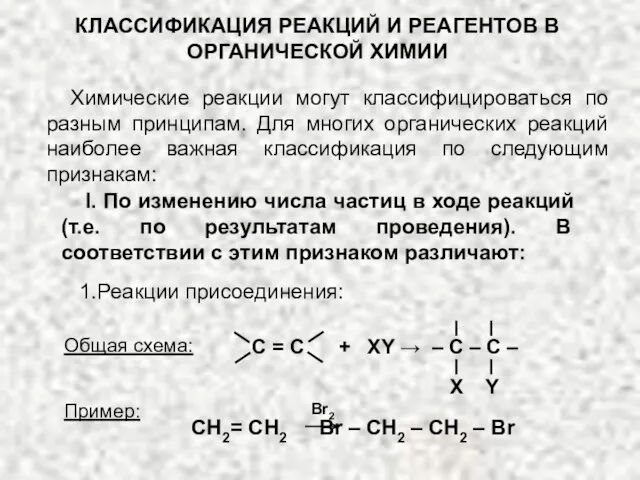 КЛАССИФИКАЦИЯ РЕАКЦИЙ И РЕАГЕНТОВ В ОРГАНИЧЕСКОЙ ХИМИИ
КЛАССИФИКАЦИЯ РЕАКЦИЙ И РЕАГЕНТОВ В ОРГАНИЧЕСКОЙ ХИМИИ Их именами названы улицы. Шаблоны
Их именами названы улицы. Шаблоны Презентация на тему: Паровая турбина
Презентация на тему: Паровая турбина Правила варки заправочных супов
Правила варки заправочных супов Физические основы работы ЭВМ
Физические основы работы ЭВМ Координационный центр реабилитации и социальной адаптации несовершеннолетних выпускников пенитенциарных учреждений
Координационный центр реабилитации и социальной адаптации несовершеннолетних выпускников пенитенциарных учреждений Дидактика информационного и индустриального обществ
Дидактика информационного и индустриального обществ Храмы 12-13 в
Храмы 12-13 в Институт точных наук и информационных технологий. Магистерские программы
Институт точных наук и информационных технологий. Магистерские программы Презентация на тему Методика работы социального педагогам с семьей
Презентация на тему Методика работы социального педагогам с семьей Специализированное отделение оздоровительного, социально-медицинского обслуживания на дому
Специализированное отделение оздоровительного, социально-медицинского обслуживания на дому Здоровье детей в наших руках
Здоровье детей в наших руках Основы алгоритмизации
Основы алгоритмизации Арт-терапия
Арт-терапия Виды излучений
Виды излучений Виртуальные книжные выставки: особенность технологии создания
Виртуальные книжные выставки: особенность технологии создания СОНЕТ
СОНЕТ Хэлоуин
Хэлоуин Внедрения
Внедрения Строение клетки(урок 2)
Строение клетки(урок 2) Агабекян Каринэ Владимировна, учитель русского языка и литературы МБОУ «Южно-Российский лицей казачества и народов Кавказа» г
Агабекян Каринэ Владимировна, учитель русского языка и литературы МБОУ «Южно-Российский лицей казачества и народов Кавказа» г