- О РАСПОЗНАВАНИИ ЖЕСТОВ ЯЗЫКА ГЛУХИХ

Содержание
- 2. Цель работы Положительная социализация глухих людей в условиях современного модернизируемого и инновационного общества Облегчение коммуникации между
- 3. Предшествующие разработки Мультимедийный толковый словарь русского жестового языка RuSLED (Россия) 3D Редактор жестов SignEditor с использованием
- 4. Недостатки предыдущих работ RuSLED: в значительной мере содержит жесты «кальки» (Signed Russian), отличные от используемых в
- 5. Пример нотации Л.С. Димскис Запись в нотации HamNoSys чешского жеста «семьдесят» Общая структура представления жеста в
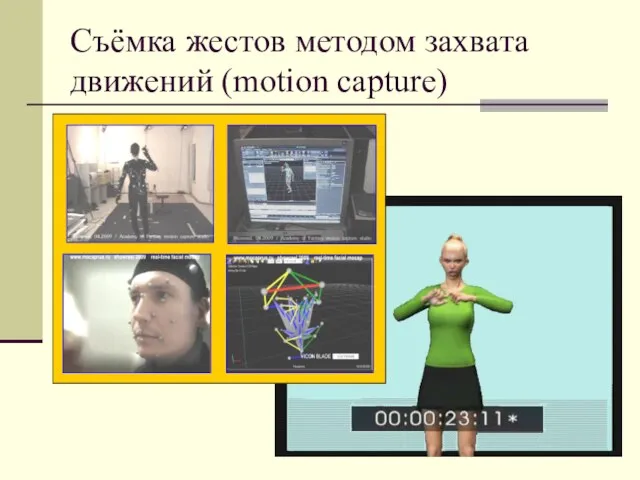
- 6. Съёмка жестов методом захвата движений (motion capture)
- 7. Зачем нужен автоматизированный сурдоперевод? Недостаточное владение глухими словесным русским языком. Из-за ограниченного активного словаря они часто
- 8. Перевод жестового высказывания Выделение ключевых кадров из видеоизображения жестового выражения Преобразование растрового изображения кадра в совокупность
- 9. Распознавание – поиск в пространстве признаков Сокращение размерности: растр → векторные объекты → кортежи признаков, характеризующих
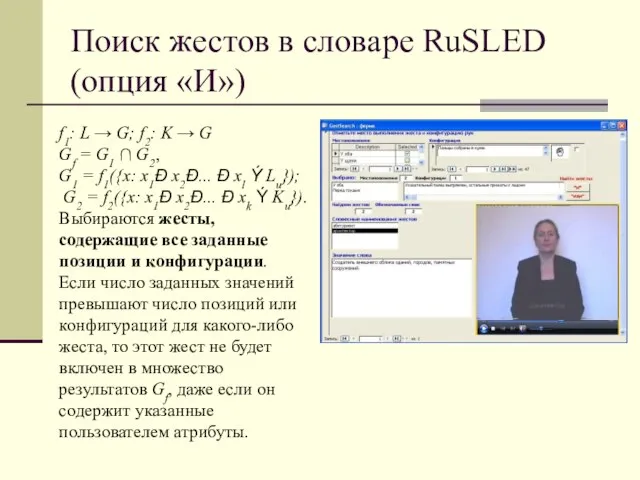
- 10. Поиск жестов в словаре RuSLED (опция «И») f1: L → G; f2: K → G Gf
- 11. Поиск жестов в словаре RuSLED (опция «ИЛИ») f1: L → G; f2: K → G Gf
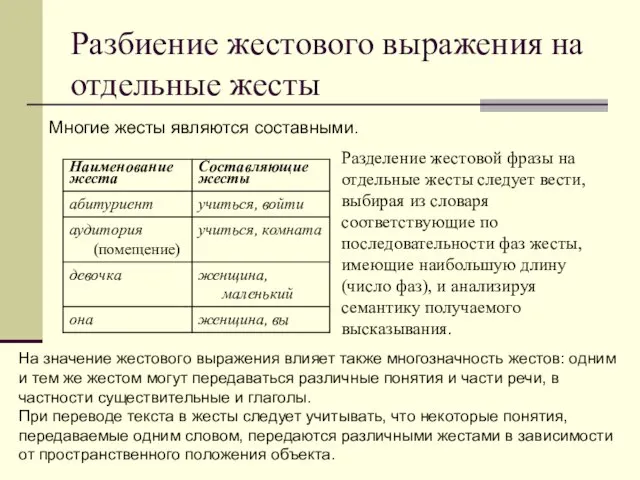
- 12. Разбиение жестового выражения на отдельные жесты Многие жесты являются составными. Разделение жестовой фразы на отдельные жесты
- 13. Понимание текста Результатом понимания текста должно быть опознание объектов, описанных в тексте, их пространственного положения, а
- 14. Система автоматической обработки текста должна уметь видеть? Разрешение дейктической референции при обработке жестовых высказываний требует знания
- 16. Скачать презентацию
Слайд 2Цель работы
Положительная социализация глухих людей в условиях современного модернизируемого и инновационного общества
Облегчение
Цель работы
Положительная социализация глухих людей в условиях современного модернизируемого и инновационного общества
Облегчение
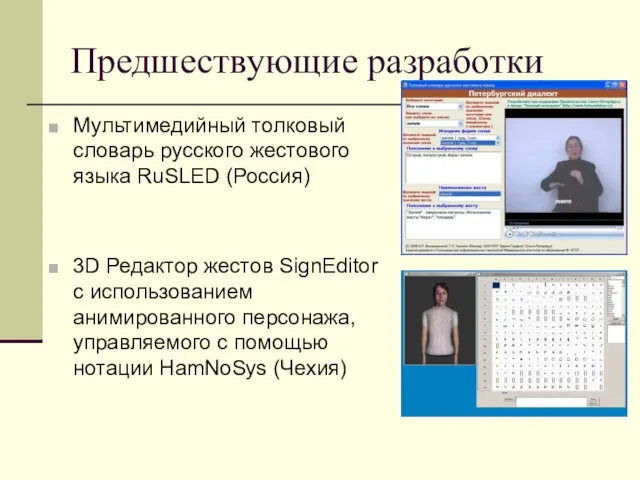
Слайд 3Предшествующие разработки
Мультимедийный толковый словарь русского жестового языка RuSLED (Россия)
3D Редактор жестов
Предшествующие разработки
Мультимедийный толковый словарь русского жестового языка RuSLED (Россия)
3D Редактор жестов
Слайд 4Недостатки предыдущих работ
RuSLED: в значительной мере содержит жесты «кальки» (Signed Russian), отличные
Недостатки предыдущих работ
RuSLED: в значительной мере содержит жесты «кальки» (Signed Russian), отличные
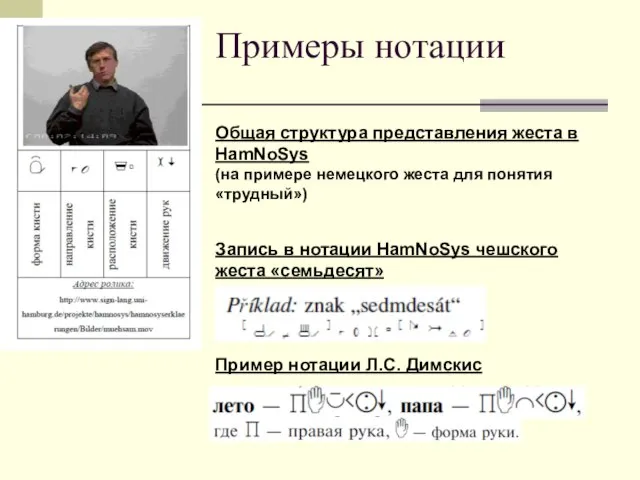
Слайд 5Пример нотации Л.С. Димскис
Запись в нотации HamNoSys чешского жеста «семьдесят»
Общая структура представления
Пример нотации Л.С. Димскис
Запись в нотации HamNoSys чешского жеста «семьдесят»
Общая структура представления
Слайд 6Съёмка жестов методом захвата движений (motion capture)
Съёмка жестов методом захвата движений (motion capture)
Слайд 7Зачем нужен автоматизированный сурдоперевод?
Недостаточное владение глухими словесным русским языком. Из-за ограниченного активного
Зачем нужен автоматизированный сурдоперевод?
Недостаточное владение глухими словесным русским языком. Из-за ограниченного активного
Слайд 8Перевод жестового высказывания
Выделение ключевых кадров из видеоизображения жестового выражения
Преобразование растрового изображения кадра
Перевод жестового высказывания
Выделение ключевых кадров из видеоизображения жестового выражения
Преобразование растрового изображения кадра
Слайд 9Распознавание – поиск в пространстве признаков
Сокращение размерности: растр → векторные объекты →
Распознавание – поиск в пространстве признаков
Сокращение размерности: растр → векторные объекты →
Слайд 10Поиск жестов в словаре RuSLED (опция «И»)
f1: L → G; f2: K
Поиск жестов в словаре RuSLED (опция «И»)
f1: L → G; f2: K
Слайд 11Поиск жестов в словаре RuSLED (опция «ИЛИ»)
f1: L → G; f2: K
Поиск жестов в словаре RuSLED (опция «ИЛИ»)
f1: L → G; f2: K

Слайд 12Разбиение жестового выражения на отдельные жесты
Многие жесты являются составными.
Разделение жестовой фразы на
Разбиение жестового выражения на отдельные жесты
Многие жесты являются составными.
Разделение жестовой фразы на
Слайд 13Понимание текста
Результатом понимания текста должно быть опознание объектов, описанных в тексте, их
Понимание текста
Результатом понимания текста должно быть опознание объектов, описанных в тексте, их
Слайд 14Система автоматической обработки текста должна уметь видеть?
Разрешение дейктической референции при обработке жестовых
Система автоматической обработки текста должна уметь видеть?
Разрешение дейктической референции при обработке жестовых
 Идейно-художественное своеобразие произведения М.Ю. Лермонтова
Идейно-художественное своеобразие произведения М.Ю. Лермонтова Презентация на тему Гигиена органа слуха
Презентация на тему Гигиена органа слуха Площадь прямоугольного треугольника: алгоритм нахождения площади треугольника
Площадь прямоугольного треугольника: алгоритм нахождения площади треугольника Определение права, размера и сроков назначения трудовых пенсий
Определение права, размера и сроков назначения трудовых пенсий Коммерческое предложение от Laika Logistics
Коммерческое предложение от Laika Logistics СПИД Синдром приобретённого иммунного дефицита
СПИД Синдром приобретённого иммунного дефицита Статья 5. Никто не должен подвергаться пыткам или жестоким, бесчеловечным или унижающим достоинство обращению и наказанию
Статья 5. Никто не должен подвергаться пыткам или жестоким, бесчеловечным или унижающим достоинство обращению и наказанию Шрифтовая графика и типографика. Портфолио учебных работ
Шрифтовая графика и типографика. Портфолио учебных работ Марина Ивановна Цветаева. Биография поэта и поэтическое творчество
Марина Ивановна Цветаева. Биография поэта и поэтическое творчество Появился заказчик. Что делать?
Появился заказчик. Что делать? Причинно-следственный анализ
Причинно-следственный анализ Графическая работа. Проекции группы тел
Графическая работа. Проекции группы тел ФРАНЦИЯ
ФРАНЦИЯ People. Фотоальбом
People. Фотоальбом Сочинение по картине Ивана Ивановича Фирсова «Юный живописец»
Сочинение по картине Ивана Ивановича Фирсова «Юный живописец» powerpointstore.com_w57
powerpointstore.com_w57 Презентация на тему: «Похмелье»
Презентация на тему: «Похмелье» Государство, его признаки и формы
Государство, его признаки и формы Команда B2O
Команда B2O Бала құқықтары туралы
Бала құқықтары туралы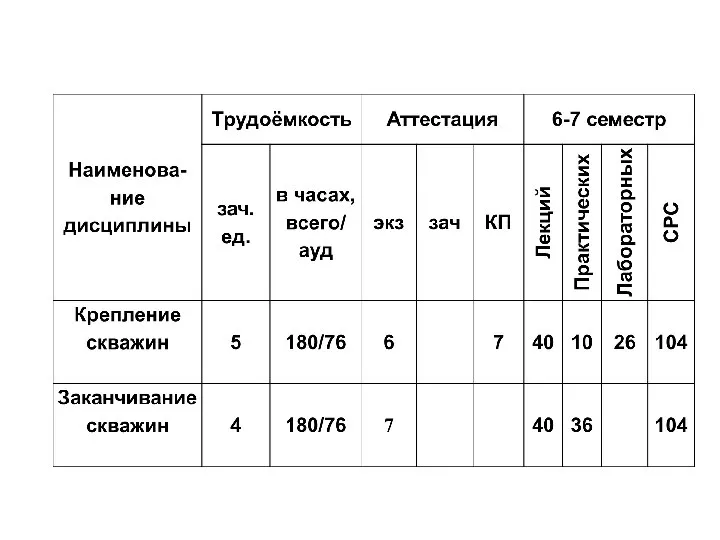 Крепление скважин
Крепление скважин Приложение №8 к административному регламенту
Приложение №8 к административному регламенту Команда Вознесенской школы впервые участвовавшая в краевых ( восточная зона) соревнованиях.
Команда Вознесенской школы впервые участвовавшая в краевых ( восточная зона) соревнованиях. «Опыт создания и деятельность Объединения РаЭл»
«Опыт создания и деятельность Объединения РаЭл» Школа панацея 17.09.2020
Школа панацея 17.09.2020 Тема проекта:«Как человек использует свойства воды?»
Тема проекта:«Как человек использует свойства воды?» Презентация на тему Насекомые рекордсмены
Презентация на тему Насекомые рекордсмены  Буквы Е и И в приставках НЕ - и НИ - отрицательных наречий
Буквы Е и И в приставках НЕ - и НИ - отрицательных наречий