- Оптимизация асинхронных электроприводов

Содержание
- 2. Оптимизация асинхронных электроприводов
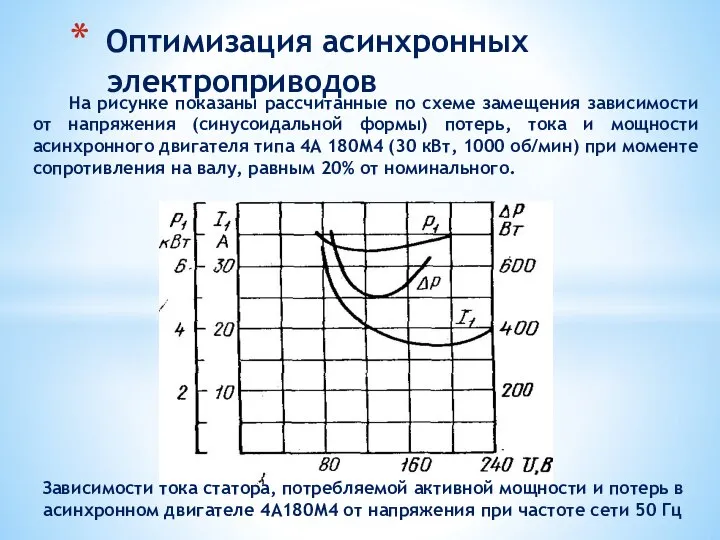
- 3. Оптимизация асинхронных электроприводов Зависимости тока статора, потребляемой активной мощности и потерь в асинхронном двигателе 4А180М4 от
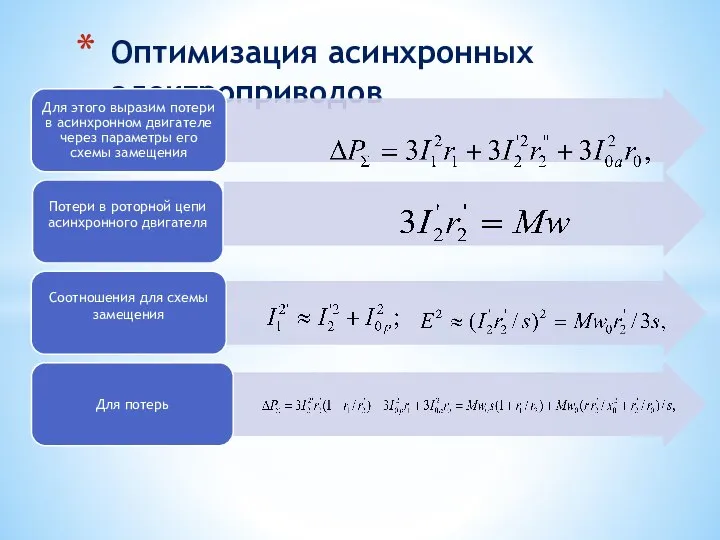
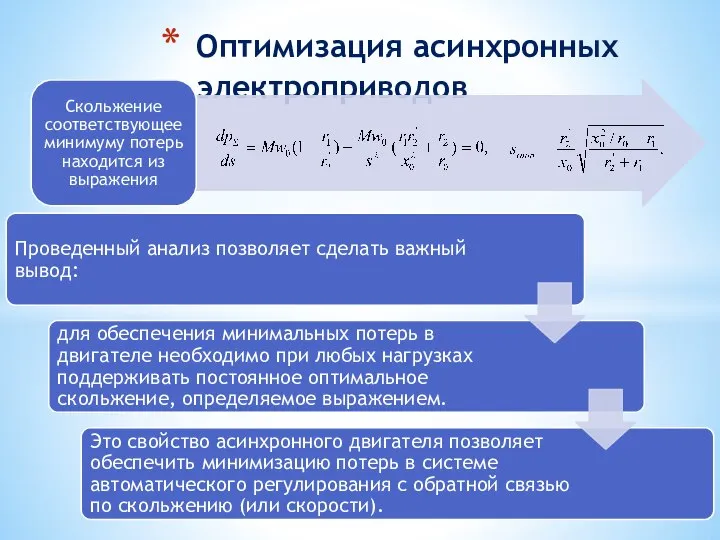
- 4. Оптимизация асинхронных электроприводов
- 5. Оптимизация асинхронных электроприводов
- 6. Оптимизация асинхронных электроприводов
- 7. Оптимизация асинхронных электроприводов Система автоматического регулирования с обратной связью по скорости
- 8. Оптимизация асинхронных электроприводов
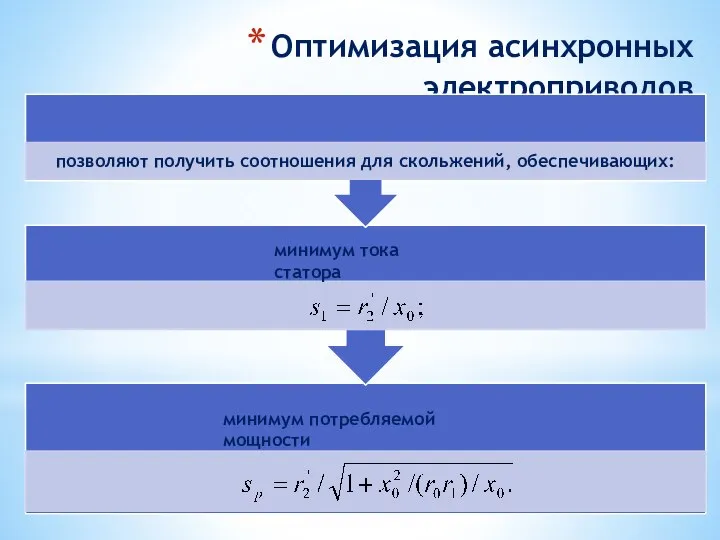
- 9. Оптимизация асинхронных электроприводов минимум тока статора минимум потребляемой мощности
- 10. Оптимизация асинхронных электроприводов Рассматривая совместно выражения для скольжений можно сформулировать следующее положение: любой из рассмотренных способов
- 12. Скачать презентацию
Слайд 3Оптимизация асинхронных электроприводов
Зависимости тока статора, потребляемой активной мощности и потерь в асинхронном
Оптимизация асинхронных электроприводов
Зависимости тока статора, потребляемой активной мощности и потерь в асинхронном
Слайд 4Оптимизация асинхронных электроприводов
Оптимизация асинхронных электроприводов
Слайд 5Оптимизация асинхронных электроприводов
Оптимизация асинхронных электроприводов
Слайд 6Оптимизация асинхронных электроприводов
Оптимизация асинхронных электроприводов
Слайд 7Оптимизация асинхронных электроприводов
Система автоматического регулирования с
Оптимизация асинхронных электроприводов
Система автоматического регулирования с

Слайд 8Оптимизация асинхронных электроприводов
Оптимизация асинхронных электроприводов
Слайд 9Оптимизация асинхронных электроприводов
минимум тока статора
минимум потребляемой мощности
Оптимизация асинхронных электроприводов
минимум тока статора
минимум потребляемой мощности
Слайд 10Оптимизация асинхронных электроприводов
Рассматривая совместно выражения для скольжений можно сформулировать следующее положение: любой
Оптимизация асинхронных электроприводов
Рассматривая совместно выражения для скольжений можно сформулировать следующее положение: любой
 Этносоциология
Этносоциология Феникс. Сказка от Леонардо да Винчи
Феникс. Сказка от Леонардо да Винчи Презентация на тему Жизнь египетского вельможи (5 класс)
Презентация на тему Жизнь египетского вельможи (5 класс) Мастер по лепке цветов из полимерной глины Тумелевич Юлия. Фотоальбом
Мастер по лепке цветов из полимерной глины Тумелевич Юлия. Фотоальбом Football fans
Football fans Презентация на тему Плато Кваркуш
Презентация на тему Плато Кваркуш О распределенных фактографических системах
О распределенных фактографических системах Марийская медицина и религия
Марийская медицина и религия Парфюмерные товары
Парфюмерные товары Презентация на тему Черные дыры в космическом пространстве
Презентация на тему Черные дыры в космическом пространстве ЭЛЕКТРОМЕХАНИЧЕСКИЕ КОРПУСА ЗАМКОВ ABLOY® ЗАПОРНЫЕ ПЛАНКИ ДЛЯ ЕВРОПРОФИЛЬНЫХ ЗАМКОВ
ЭЛЕКТРОМЕХАНИЧЕСКИЕ КОРПУСА ЗАМКОВ ABLOY® ЗАПОРНЫЕ ПЛАНКИ ДЛЯ ЕВРОПРОФИЛЬНЫХ ЗАМКОВ Бабаевская кондитерская фабрика
Бабаевская кондитерская фабрика Особенности региональной работы ЗПИФов недвижимости 27 ноября 2007
Особенности региональной работы ЗПИФов недвижимости 27 ноября 2007 СВЯТАЯ ЕМИЛИЯ КЕСАРИЙСКАЯ (КАППАДОКИЙСКАЯ) СВЯТИТЕЛЬ
СВЯТАЯ ЕМИЛИЯ КЕСАРИЙСКАЯ (КАППАДОКИЙСКАЯ) СВЯТИТЕЛЬ Заголовок презентации. Подзаголовок. Шаблон
Заголовок презентации. Подзаголовок. Шаблон Исследовательская деятельность младших школьников
Исследовательская деятельность младших школьников Утренняя зарядка
Утренняя зарядка Презентация на тему Аргументация своей позиции
Презентация на тему Аргументация своей позиции Мотивы самосохранения в рекламе
Мотивы самосохранения в рекламе Портрет журналиста
Портрет журналиста Презентация на тему Преодоление отсталости развивающихся стран
Презентация на тему Преодоление отсталости развивающихся стран  Художественный промысел лаковой миниатюры в поселке Холуй, Ивановской области
Художественный промысел лаковой миниатюры в поселке Холуй, Ивановской области 1b
1b Викторина #ВместеЯРЧЕ
Викторина #ВместеЯРЧЕ Психофизиологические основы учебного труда. Средства физической культуры в регулировании работоспособности
Психофизиологические основы учебного труда. Средства физической культуры в регулировании работоспособности Насекомые-гиганты. Изобразительное искусство
Насекомые-гиганты. Изобразительное искусство Презентация на тему Здоровье. Веселые советы
Презентация на тему Здоровье. Веселые советы Россия в начале XIX века
Россия в начале XIX века