- Основытеории автоматического управления

Содержание
- 2. Теория автоматического управления - одна из красивейших современных наук. Освоить ТАУ - значит овладеть системным мышлением,
- 3. Обучаемый должен знать следующие разделы математического аппарата, которые эффектно используются в ТАУ: анализ функций, дифференциальные уравнения;
- 4. Содержание курса Записаться на курс Вернуться в начало Еще Вернуться Что для этого надо? Подробнее Зачем
- 5. Содержание курса Записаться на курс Вернуться в начало Еще Вернуться Раздел I. Объекты и звенья систем
- 6. Содержание курса Записаться на курс Вернуться в начало Вернуться Раздел III. Системы и принципы автоматического управления
- 7. Техническая организация курса Записаться на курс Вернуться в начало Еще Вернуться Что для этого надо? Приведите
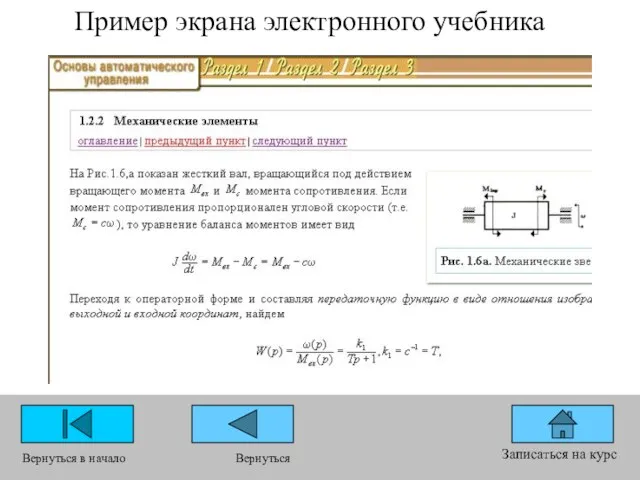
- 8. Записаться на курс Вернуться в начало Вернуться Пример экрана электронного учебника
- 9. Техническая организация курса Записаться на курс Вернуться в начало Вернуться 1. Теоретический материал в виде электронного
- 10. Техническая организация курса Записаться на курс Вернуться в начало Вернуться Для работы с теоретическим курсом основ
- 11. Преподаватели Записаться на курс Вернуться в начало Вернуться Подробнее Чечурин С.Л. профессор СПбГТУ, доктор технических наук,
- 12. Преподаватели Записаться на курс Вернуться в начало Вперед Вернуться Чечурин Сергей Леонидович, проф., д.т.н., ректор филиала
- 13. Преподаватели Записаться на курс Вернуться в начало Назвд Чечурин Леонид Сергевич, кандидат технических наук, автор около
- 14. Примеры: на этом месте в 2002 году будет установлен автоматизированный тест для проверки уровня математической подготовки
- 15. Примеры задач теории управления: 1. Линза считывающей головки DVD проигрывателя обеспечивает позиционирование лазерного пятна строго на
- 16. Примеры задач теории управления : 2. Экономика фирмы описывается несколькими дифференциальными уравнениями, учитывающими амортизацию основных фондов,
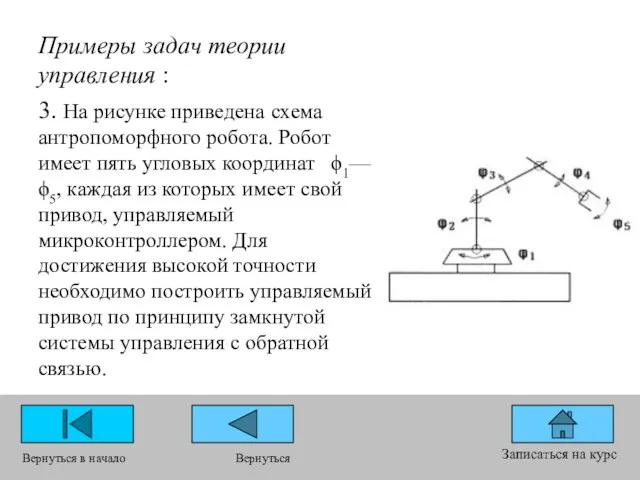
- 17. Примеры задач теории управления : 3. На рисунке приведена схема антропоморфного робота. Робот имеет пять угловых
- 19. Скачать презентацию
Слайд 3Обучаемый должен знать следующие разделы математического аппарата, которые эффектно используются в ТАУ:
Обучаемый должен знать следующие разделы математического аппарата, которые эффектно используются в ТАУ:
Слайд 4Содержание курса
Записаться на курс
Вернуться в начало
Еще
Вернуться
Что для этого надо?
Подробнее
Зачем это нужно?
I. Объекты
Содержание курса
Записаться на курс
Вернуться в начало
Еще
Вернуться
Что для этого надо?
Подробнее
Зачем это нужно?
I. Объекты
Слайд 5Содержание курса
Записаться на курс
Вернуться в начало
Еще
Вернуться
Раздел I. Объекты и звенья систем автоматического
Содержание курса
Записаться на курс
Вернуться в начало
Еще
Вернуться
Раздел I. Объекты и звенья систем автоматического
Слайд 6Содержание курса
Записаться на курс
Вернуться в начало
Вернуться
Раздел III. Системы и принципы автоматического управления
1.
Содержание курса
Записаться на курс
Вернуться в начало
Вернуться
Раздел III. Системы и принципы автоматического управления
1.
Слайд 7Техническая организация курса
Записаться на курс
Вернуться в начало
Еще
Вернуться
Что для этого надо?
Приведите пример
Подробнее
Зачем это
Техническая организация курса
Записаться на курс
Вернуться в начало
Еще
Вернуться
Что для этого надо?
Приведите пример
Подробнее
Зачем это
Слайд 8Записаться на курс
Вернуться в начало
Вернуться
Пример экрана электронного учебника
Записаться на курс
Вернуться в начало
Вернуться
Пример экрана электронного учебника
Слайд 9Техническая организация курса
Записаться на курс
Вернуться в начало
Вернуться
1. Теоретический материал в виде электронного
Техническая организация курса
Записаться на курс
Вернуться в начало
Вернуться
1. Теоретический материал в виде электронного
Слайд 10Техническая организация курса
Записаться на курс
Вернуться в начало
Вернуться
Для работы с теоретическим курсом основ
Техническая организация курса
Записаться на курс
Вернуться в начало
Вернуться
Для работы с теоретическим курсом основ
Слайд 11Преподаватели
Записаться на курс
Вернуться в начало
Вернуться
Подробнее
Чечурин С.Л.
профессор СПбГТУ, доктор технических наук, автор нескольких
Преподаватели
Записаться на курс
Вернуться в начало
Вернуться
Подробнее
Чечурин С.Л.
профессор СПбГТУ, доктор технических наук, автор нескольких
Слайд 12Преподаватели
Записаться на курс
Вернуться в начало
Вперед
Вернуться
Чечурин Сергей Леонидович, проф., д.т.н., ректор филиала Института
Преподаватели
Записаться на курс
Вернуться в начало
Вперед
Вернуться
Чечурин Сергей Леонидович, проф., д.т.н., ректор филиала Института
Слайд 13Преподаватели
Записаться на курс
Вернуться в начало
Назвд
Чечурин Леонид Сергевич, кандидат технических наук, автор около
Преподаватели
Записаться на курс
Вернуться в начало
Назвд
Чечурин Леонид Сергевич, кандидат технических наук, автор около
Слайд 14Примеры:
на этом месте в 2002 году будет установлен автоматизированный тест для проверки
Примеры:
на этом месте в 2002 году будет установлен автоматизированный тест для проверки
Слайд 15Примеры задач теории управления:
1. Линза считывающей головки DVD проигрывателя обеспечивает позиционирование лазерного
Примеры задач теории управления:
1. Линза считывающей головки DVD проигрывателя обеспечивает позиционирование лазерного
Слайд 16Примеры задач теории управления :
2. Экономика фирмы описывается несколькими дифференциальными уравнениями, учитывающими
Примеры задач теории управления :
2. Экономика фирмы описывается несколькими дифференциальными уравнениями, учитывающими
Слайд 17Примеры задач теории управления :
3. На рисунке приведена схема антропоморфного робота. Робот
Примеры задач теории управления :
3. На рисунке приведена схема антропоморфного робота. Робот
 London
London Основы менеджмента
Основы менеджмента Кто покупает? Портрет вашего клиента
Кто покупает? Портрет вашего клиента Презентация на тему Непрерывные случайные величины
Презентация на тему Непрерывные случайные величины  Урок-путешествие
Урок-путешествие Экспортная Интернет площадка www.exim.uz
Экспортная Интернет площадка www.exim.uz Неправительственные правозащитные организации
Неправительственные правозащитные организации Презентация на тему Строение и функции белков
Презентация на тему Строение и функции белков  Инвестиционные программы Gold Fort
Инвестиционные программы Gold Fort Артюхова Нина Михайловна — русская детская писательница
Артюхова Нина Михайловна — русская детская писательница Особо избранный чин 33-х псалмов вечнозаветной псалтири на святорусском языке
Особо избранный чин 33-х псалмов вечнозаветной псалтири на святорусском языке Продажа земельных участков. Республика Крым
Продажа земельных участков. Республика Крым Презентация на тему Ромео и Джульетта
Презентация на тему Ромео и Джульетта Филогенетический и онтогенетический методы развития психики живых существ
Филогенетический и онтогенетический методы развития психики живых существ Место проведения экспедиции
Место проведения экспедиции project-presentation-template
project-presentation-template Медиаобразованиев России www.edu.of.ru/mediaeducation
Медиаобразованиев России www.edu.of.ru/mediaeducation Тема: Правописание частиц НЕ и НИ.
Тема: Правописание частиц НЕ и НИ. Чек-лист для InGame (детали)
Чек-лист для InGame (детали) Презентация на тему Всеволод Александрович Рождественский 29 марта 1895- 31 августа 1977
Презентация на тему Всеволод Александрович Рождественский 29 марта 1895- 31 августа 1977  Исследование как основа и как инструмент продвижения регионов
Исследование как основа и как инструмент продвижения регионов Мир на рубеже веков
Мир на рубеже веков Решение задач (Практическое пособие)
Решение задач (Практическое пособие) Тема:«Адаптационный период в 5б классе»Классный руководитель: Триколе О.В.
Тема:«Адаптационный период в 5б классе»Классный руководитель: Триколе О.В. Элемент архитектуры портал
Элемент архитектуры портал Переніс слві
Переніс слві Задание по дисциплине Маркетинговые стратегии
Задание по дисциплине Маркетинговые стратегии Ведение бизнеса по обслуживанию граждан пожилого возраста и инвалидов
Ведение бизнеса по обслуживанию граждан пожилого возраста и инвалидов