- Основы теории радиолокации

Содержание
- 2. УЧЕБНЫЕ ЦЕЛИ: 1.Ознакомить студентов с основными положениями принципов создания поля активной радиолокации и принципов соответствия параметров
- 3. УЧЕБНЫЕ ВОПРОСЫ : 1.Принципы создания поля активной 2.Принципы обработки радиолокационной информации.
- 4. ЛИТЕРАТУРА : 1.Теоретические основы радиолокации. Ширман Я.Д. Издательство «Советское радио». Москва 1970 г. 2.Основы построения РЛС
- 5. Вопрос 1.Принципы создания поля активной локации. Подсистема активной радиолокации, наряду с подсистемами пассивной радиолокации и САЗО,
- 6. Радиолокационное поле активной локации (РЛП), формируемое РЛС радиотехнических подразделений, представляет материальную основу, обеспечивающую решение РТВ задач
- 7. При построении группировки РТВ учитывают следующие принципы создания РЛП: 1. Принципы соответствия параметров РЛП возможностям СВН
- 8. Принцип соответствия параметров радиолокационного поля возможностям средств воздушного нападения противника Реализация данного принципа предполагает создание сплошного
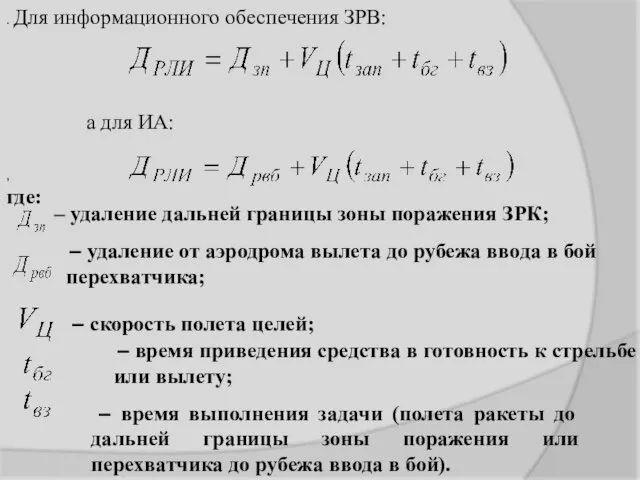
- 9. . Для информационного обеспечения ЗРВ: а для ИА: , где: – удаление дальней границы зоны поражения
- 10. Расстояние до требуемых рубежей выдачи радиолокационной информации. а)-ЗРВ б)-ИА
- 11. Из принципа наземного базирования радиолокационной системы РТВ и кривизны Земли, а также необходимости создания РЛП над
- 12. Идеальным» вариантом построения группировки является расположение подразделений по вершинам равносторонних треугольников (в узлах треугольной сетки). «Идеализация»
- 13. Расстояние между позициями подразделений (густота регулярной сети) определяется, главным образом, обеспечиваемой дальностью радиолокационного обнаружения целей на
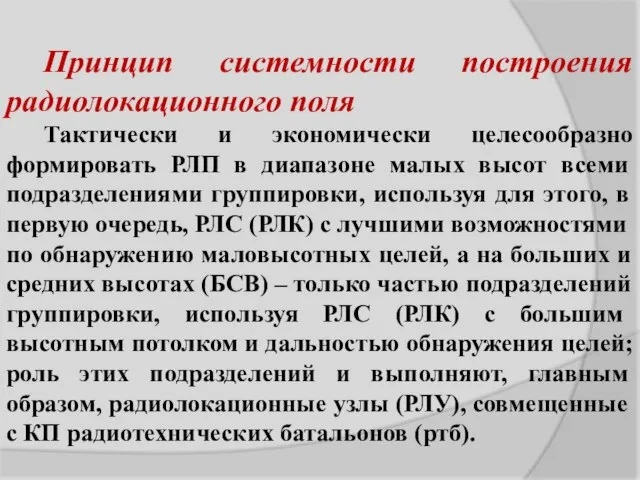
- 15. Принцип системности построения радиолокационного поля Тактически и экономически целесообразно формировать РЛП в диапазоне малых высот всеми
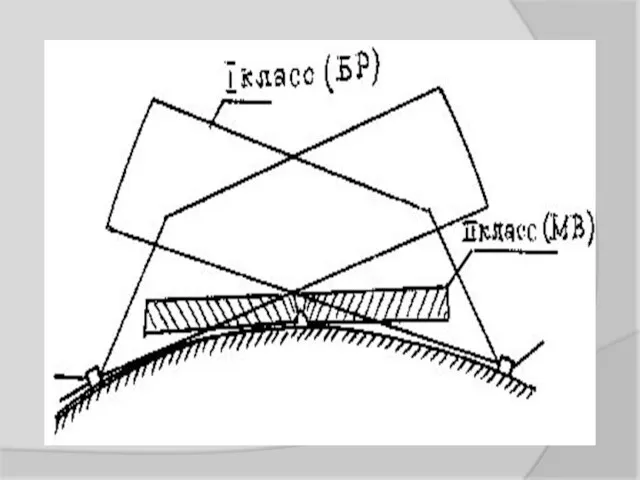
- 17. Сеть подразделений, формирующих верхний ярус поля (на БСВ) целесообразно строить по аналогии с маловысотной сетью, то
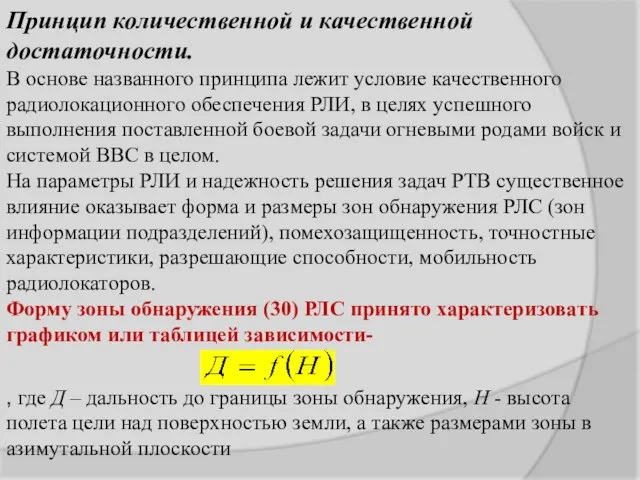
- 18. Принцип количественной и качественной достаточности. В основе названного принципа лежит условие качественного радиолокационного обеспечения РЛИ, в
- 20. Параметрами зоны обнаружения РЛС (и зоны информации подразделения) являются минимальный _ И максимальный- -углы места, максимальная
- 21. Помехозащищенность – это свойство подсистемы активной радиолокации выполнять задачи радиолокационного обеспечения ВВС с допустимым снижением качества
- 22. Помехозащищенность РЛС в условиях применения дипольных отражателей обычно характеризуют количеством пачек на 100 метров пути, при
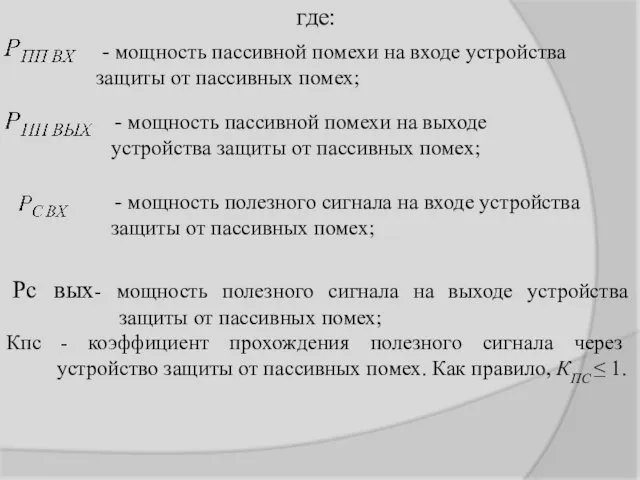
- 23. где: - мощность пассивной помехи на входе устройства защиты от пассивных помех; - мощность пассивной помехи
- 24. Разрешающая способность РЛС должна обеспечить своевременное вскрытие состава групповых целей противника. Требования к разрешающей способности определяются
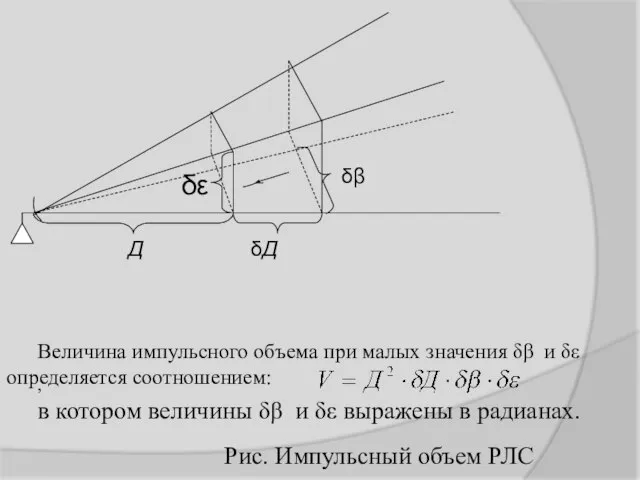
- 25. Величина импульсного объема при малых значения δβ и δε определяется соотношением: , в котором величины δβ
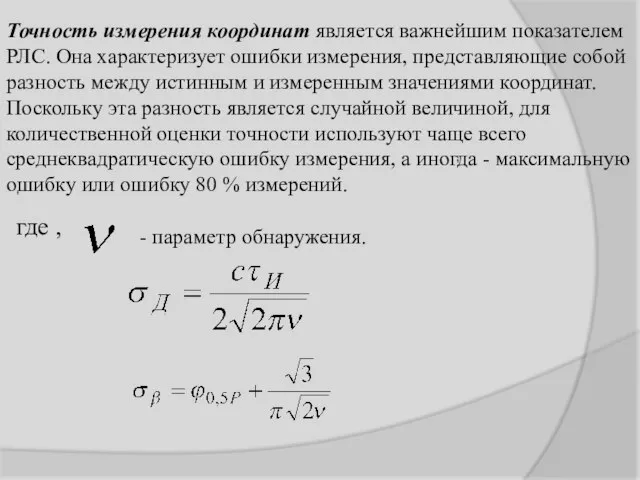
- 27. Точность измерения координат является важнейшим показателем РЛС. Она характеризует ошибки измерения, представляющие собой разность между истинным
- 28. Вопрос№2.2. Принципы обработки радиолокационной информации Сбор и обработка информации являются необходимыми элементами управления. Известно, что автоматизация
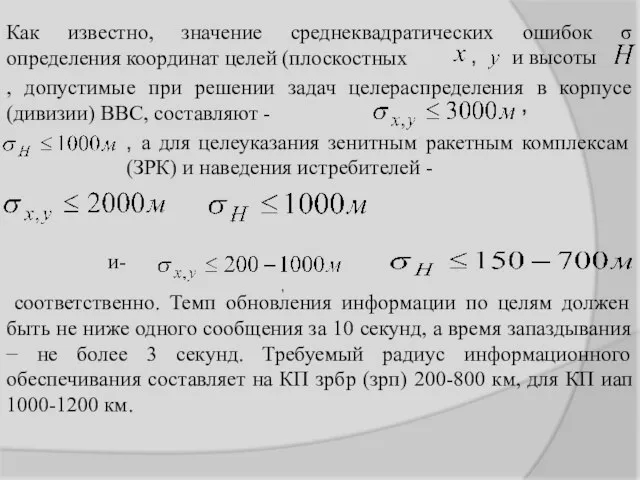
- 29. Как известно, значение среднеквадратических ошибок σ определения координат целей (плоскостных , и высоты , допустимые при
- 30. Состоящие в настоящее время на вооружении РЛС (РЛК) позволяют обеспечить приведенные выше характеристики, но только при
- 31. Цели автоматизации сбора и обработки РЛИ: 1) обеспечение соответствия качественных и количественных показателей РЛИ требованиям, предъявляемым
- 32. В соответствии с принципом многоступенчатости обработки РЛИ, предполагающим каждому вышестоящему КП получение обобщенной информации, достаточной для
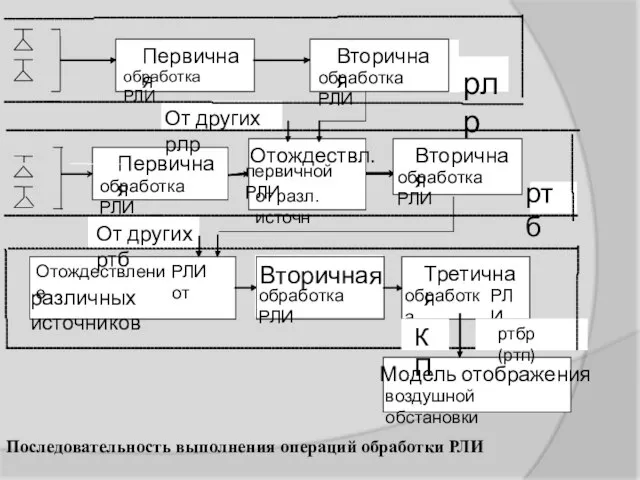
- 33. 1. Первичная обработка РЛИ обеспечивает принятие решения о наличии (обнаружении) воздушного объекта на очередном обзоре пространства
- 34. . В ходе первичной обработки РЛИ могут также оцениваться скорость цели, уровень и модуляция ЭПР и
- 35. Последовательность выполнения операций обработки РЛИ
- 36. Процедуры первичной и вторичной обработки состоят в принятии решений типа «да-нет» о наличии цели либо трассы
- 37. 2. Вторичная обработка РЛИ обеспечивает принятие решения об обнаружении трассы (траектории) цели и уточнение результатов измерений
- 38. Вторичной обработке подвергаются радиолокационные отметки, полученные в течение нескольких обзоров воздушного пространства. Показателями качества обнаружения трасс
- 39. . Третичная обработка РЛИ обеспечивает объединение (обобщение) информации о воздушной обстановке (объектах), поступающей от нескольких первичных
- 40. Следует отметить, что операции первичной и вторичной обработки выполняются в системе периодичности с темпом не ниже
- 41. Т1.Занятие№5.Методы обзора пространства, применяемые в РЛС РТВ.(Групповое занятие). Учебные вопросы студентам для подготовки к занятию: 1.
- 42. 5.Какие программы обзора в РТВ получили наибольшее распространение? Раскрыть их суть. 6.Каков метод обзора по дальности?
- 46. Достоинство метрового диапазона волн: в метровом диапазоне волн больше, чем в сантиметровом и дециметровом, эффективные отражающие
- 47. задание на самоподготовку 1.Изучить назначение, состав, П-18. 2.Изучить тактические и технические характеристики изделия 1РЛ131
- 48. Литература: Подвижная радиолокационная станция П-18,М.:Воен.издат1978. Техническое описание изделия 1РЛ131.
- 49. Контрольные вопросы Почему в РЛС с простым сигналом применяются однокаскадные схемы построения радиопередающих устройств? Почему радиопередающие
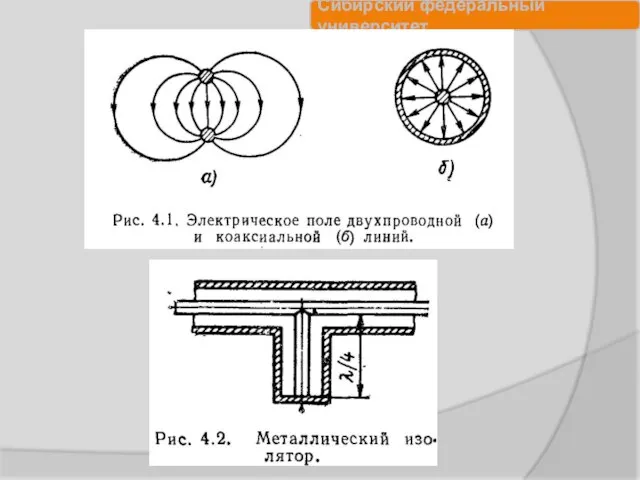
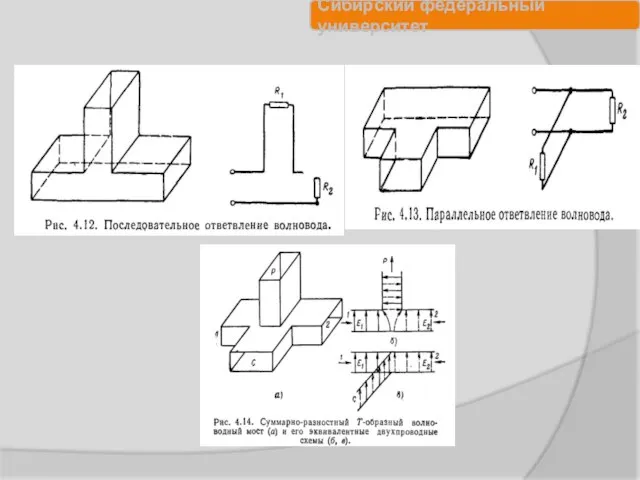
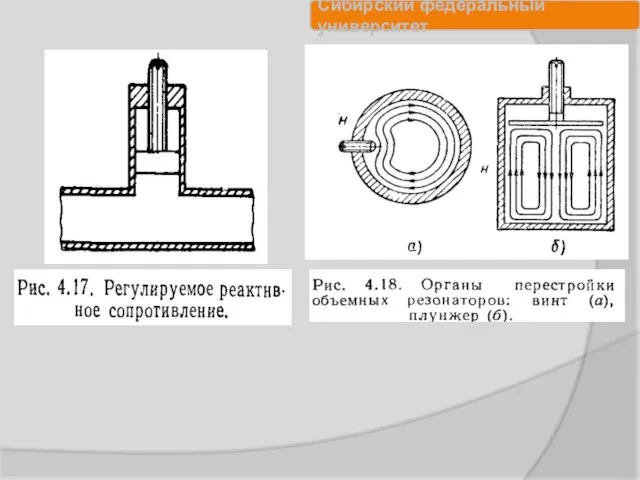
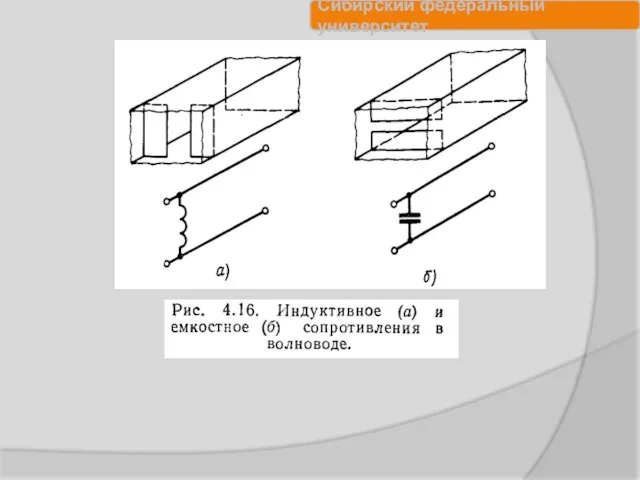
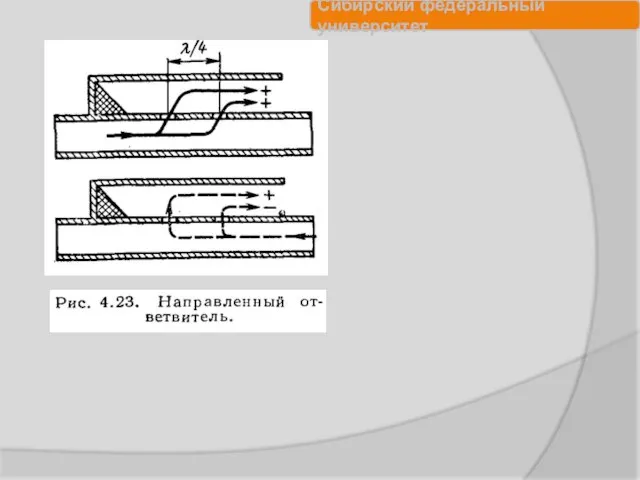
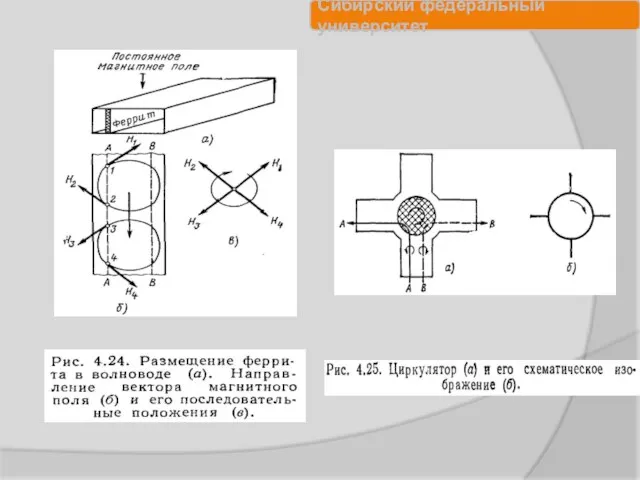
- 51. ВЧ элементы РЛС Коаксиальные и двукоаксиальные линии передачи Волноводы Высокочастотные фильтры Микрополосковые линии Ферритовые вентили Волноводные
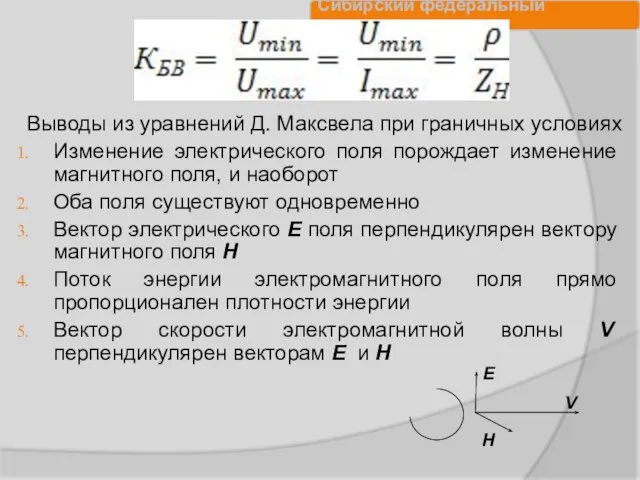
- 52. Основные технические характеристики волноводного тракта : 1.Степень согласования волноводного тракта с нагрузкой характеризуется коэффициентом бегущей волны
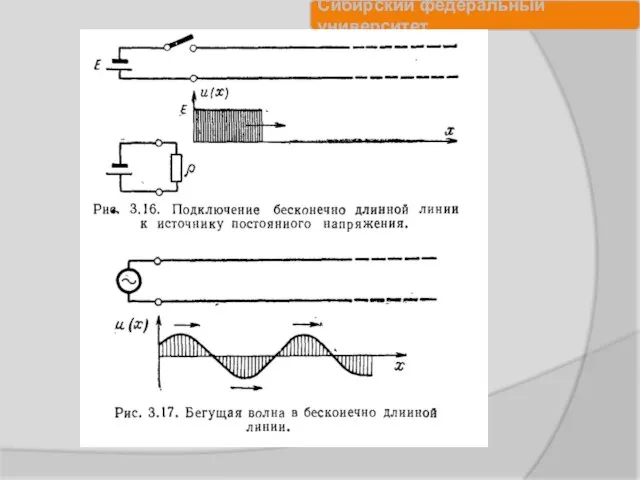
- 53. Параметры длинной линии 1.Длинная линия характеризуется распределенными пара- метрами: емкостью С'[Ф/М] и индуктивностью L'[гн/M] на единицу
- 56. При подключении разомкнутой линии к источнику переменного напряжения Первоначально от входных зажимов к концу линии распространяется
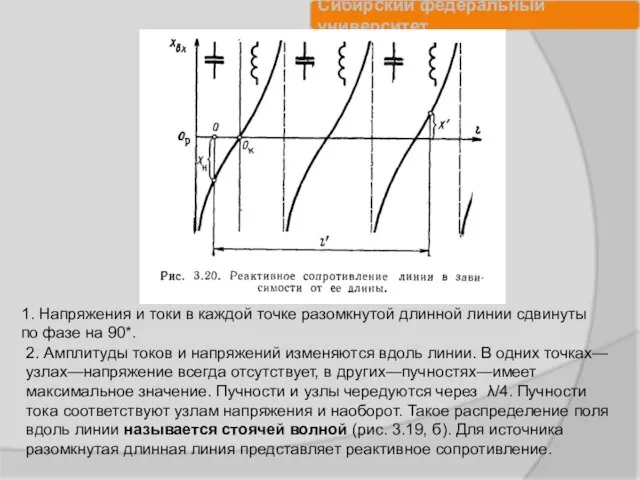
- 57. 1. Напряжения и токи в каждой точке разомкнутой длинной линии сдвинуты по фазе на 90*. 2.
- 59. ВЧ элементы РЛС Коаксиальные и двукоаксиальные линии передачи Волноводы Высокочастотные фильтры Микрополосковые линии Ферритовые вентили Волноводные
- 62. Выводы из уравнений Д. Максвела при граничных условиях Изменение электрического поля порождает изменение магнитного поля, и
- 63. 6. Скорость распространения электромагнитной волны зависит от диэлектрической и магнитной проницаемости среды 7. Электрическое поле охватывает
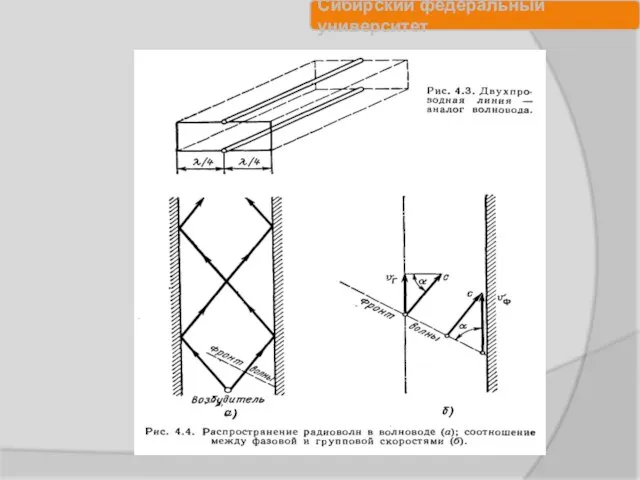
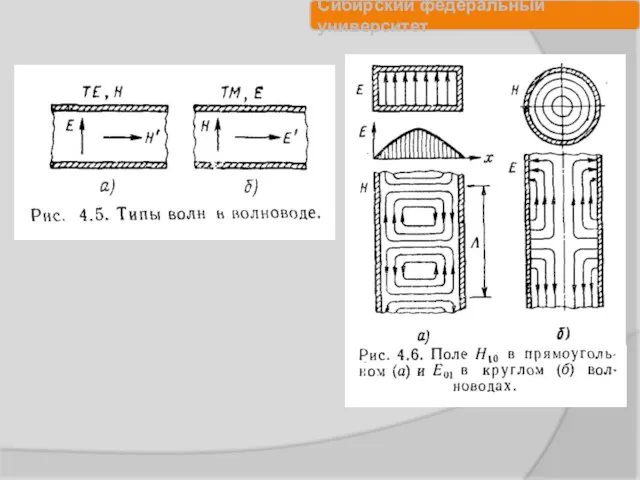
- 64. Волноводы характеризуют типом волны, устанавливающейся в поперечном сечении: 1. В поперечном направлении действует вектор Е; вдоль
- 65. Фидерная линия – двухпроводная линия, предназначенная для передачи энергии высоких частот. Длинными линиями называются такие линии
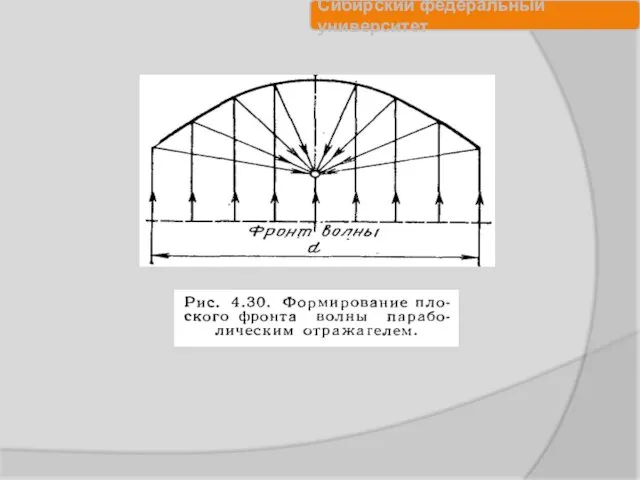
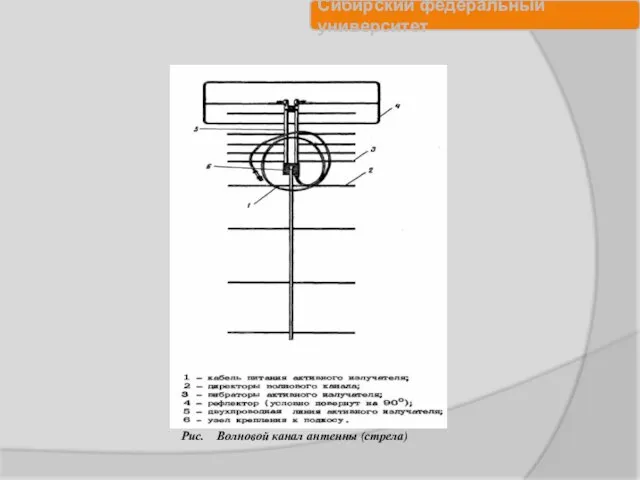
- 75. Антенна – устройство предназначенное для излучения и приема электромагнитной энергии, представляющее собой открытый колебательный контур выполненный
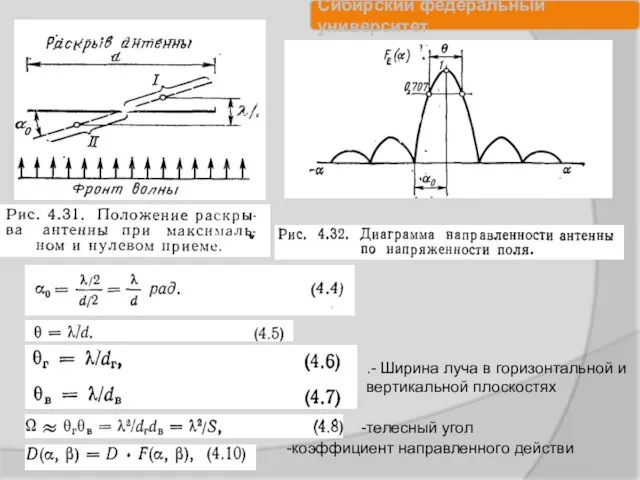
- 78. -коэффициент направленного действи -телесный угол .- Ширина луча в горизонтальной и вертикальной плоскостях
- 82. Рис. Волновой канал антенны (стрела)
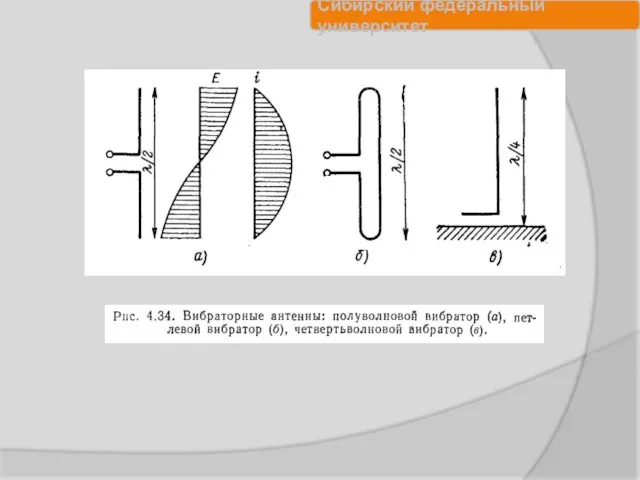
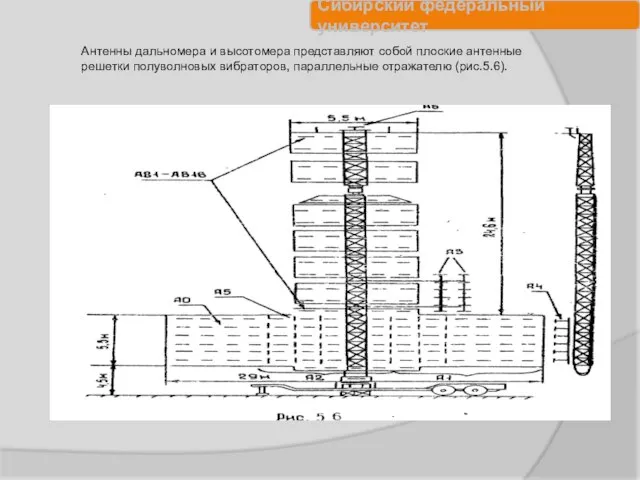
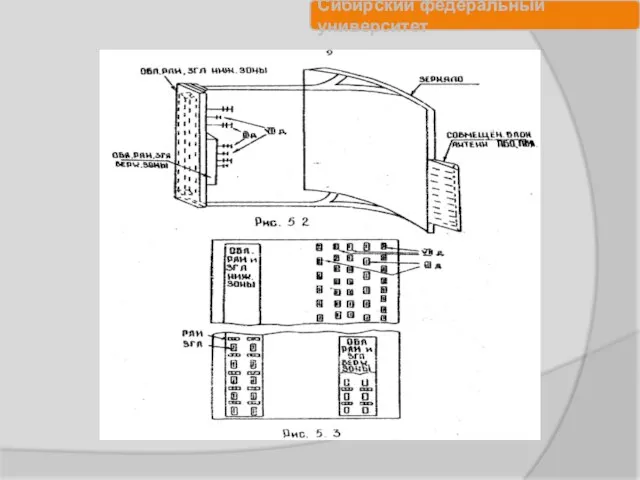
- 85. Антенны дальномера и высотомера представляют собой плоские антенные решетки полуволновых вибраторов, параллельные отражателю (рис.5.6).
- 88. Скачать презентацию
Слайд 2УЧЕБНЫЕ ЦЕЛИ:
1.Ознакомить студентов с основными положениями принципов создания поля активной радиолокации и
УЧЕБНЫЕ ЦЕЛИ:
1.Ознакомить студентов с основными положениями принципов создания поля активной радиолокации и
Слайд 3УЧЕБНЫЕ ВОПРОСЫ :
1.Принципы создания поля активной
2.Принципы обработки радиолокационной информации.
УЧЕБНЫЕ ВОПРОСЫ :
1.Принципы создания поля активной
2.Принципы обработки радиолокационной информации.
Слайд 4ЛИТЕРАТУРА :
1.Теоретические основы радиолокации. Ширман Я.Д. Издательство «Советское радио». Москва 1970 г.
2.Основы
ЛИТЕРАТУРА :
1.Теоретические основы радиолокации. Ширман Я.Д. Издательство «Советское радио». Москва 1970 г.
2.Основы
Слайд 5Вопрос 1.Принципы создания поля активной локации.
Подсистема активной радиолокации, наряду с подсистемами
Вопрос 1.Принципы создания поля активной локации.
Подсистема активной радиолокации, наряду с подсистемами
Слайд 6Радиолокационное поле активной локации (РЛП), формируемое РЛС радиотехнических подразделений, представляет материальную основу,
Радиолокационное поле активной локации (РЛП), формируемое РЛС радиотехнических подразделений, представляет материальную основу,
Слайд 7При построении группировки РТВ учитывают следующие принципы создания РЛП:
1. Принципы соответствия параметров
При построении группировки РТВ учитывают следующие принципы создания РЛП:
1. Принципы соответствия параметров
Слайд 8Принцип соответствия параметров радиолокационного поля возможностям средств воздушного нападения противника
Реализация данного принципа
Принцип соответствия параметров радиолокационного поля возможностям средств воздушного нападения противника
Реализация данного принципа
Слайд 9. Для информационного обеспечения ЗРВ:
а для ИА:
,
где:
– удаление дальней границы
. Для информационного обеспечения ЗРВ:
а для ИА:
,
где:
– удаление дальней границы
Слайд 10Расстояние до требуемых рубежей выдачи радиолокационной информации. а)-ЗРВ б)-ИА
Расстояние до требуемых рубежей выдачи радиолокационной информации. а)-ЗРВ б)-ИА
Слайд 11Из принципа наземного базирования радиолокационной системы РТВ и кривизны Земли, а также
Из принципа наземного базирования радиолокационной системы РТВ и кривизны Земли, а также
Слайд 12Идеальным» вариантом построения группировки является расположение подразделений по вершинам равносторонних треугольников (в
Идеальным» вариантом построения группировки является расположение подразделений по вершинам равносторонних треугольников (в
Слайд 13Расстояние между позициями подразделений (густота регулярной сети) определяется, главным образом, обеспечиваемой дальностью
Расстояние между позициями подразделений (густота регулярной сети) определяется, главным образом, обеспечиваемой дальностью

Слайд 15Принцип системности построения радиолокационного поля
Тактически и экономически целесообразно формировать РЛП в диапазоне
Принцип системности построения радиолокационного поля
Тактически и экономически целесообразно формировать РЛП в диапазоне
Слайд 17Сеть подразделений, формирующих верхний ярус поля (на БСВ) целесообразно строить по аналогии
Сеть подразделений, формирующих верхний ярус поля (на БСВ) целесообразно строить по аналогии
Слайд 18Принцип количественной и качественной достаточности.
В основе названного принципа лежит условие качественного радиолокационного
Принцип количественной и качественной достаточности.
В основе названного принципа лежит условие качественного радиолокационного
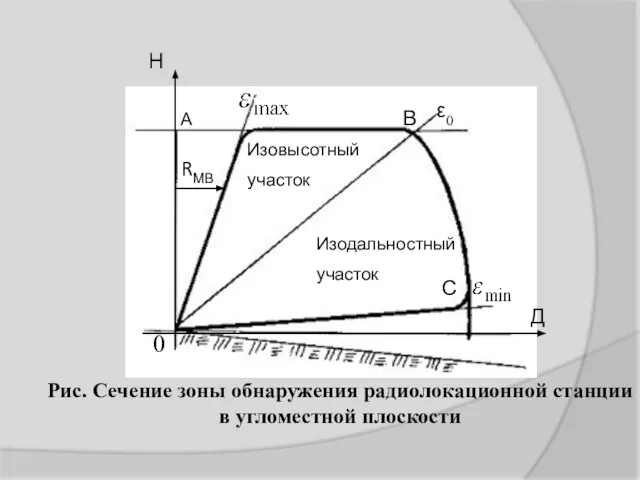
Слайд 20Параметрами зоны обнаружения РЛС (и зоны информации подразделения) являются минимальный _
И
Параметрами зоны обнаружения РЛС (и зоны информации подразделения) являются минимальный _
И
Слайд 21Помехозащищенность – это свойство подсистемы активной радиолокации выполнять задачи радиолокационного обеспечения ВВС
Помехозащищенность – это свойство подсистемы активной радиолокации выполнять задачи радиолокационного обеспечения ВВС
Слайд 22Помехозащищенность РЛС в условиях применения дипольных отражателей обычно характеризуют количеством пачек на
Помехозащищенность РЛС в условиях применения дипольных отражателей обычно характеризуют количеством пачек на
Слайд 23где:
- мощность пассивной помехи на входе устройства защиты от пассивных
где:
- мощность пассивной помехи на входе устройства защиты от пассивных
Слайд 24Разрешающая способность РЛС должна обеспечить своевременное вскрытие состава групповых целей противника. Требования
Разрешающая способность РЛС должна обеспечить своевременное вскрытие состава групповых целей противника. Требования
Слайд 25Величина импульсного объема при малых значения δβ и δε определяется соотношением:
,
в котором
Величина импульсного объема при малых значения δβ и δε определяется соотношением:
,
в котором
Слайд 27Точность измерения координат является важнейшим показателем РЛС. Она характеризует ошибки измерения, представляющие
Точность измерения координат является важнейшим показателем РЛС. Она характеризует ошибки измерения, представляющие
Слайд 28Вопрос№2.2. Принципы обработки радиолокационной информации
Сбор и обработка информации являются необходимыми элементами управления.
Вопрос№2.2. Принципы обработки радиолокационной информации
Сбор и обработка информации являются необходимыми элементами управления.
Слайд 29Как известно, значение среднеквадратических ошибок σ определения координат целей (плоскостных
,
Как известно, значение среднеквадратических ошибок σ определения координат целей (плоскостных
,
Слайд 30Состоящие в настоящее время на вооружении РЛС (РЛК) позволяют обеспечить приведенные выше
Состоящие в настоящее время на вооружении РЛС (РЛК) позволяют обеспечить приведенные выше
Слайд 31Цели автоматизации сбора и обработки РЛИ:
1) обеспечение соответствия качественных и количественных показателей
Цели автоматизации сбора и обработки РЛИ:
1) обеспечение соответствия качественных и количественных показателей
Слайд 32В соответствии с принципом многоступенчатости обработки РЛИ, предполагающим каждому вышестоящему КП получение
В соответствии с принципом многоступенчатости обработки РЛИ, предполагающим каждому вышестоящему КП получение
Слайд 331. Первичная обработка РЛИ обеспечивает принятие решения о наличии (обнаружении) воздушного объекта
1. Первичная обработка РЛИ обеспечивает принятие решения о наличии (обнаружении) воздушного объекта
Слайд 34. В ходе первичной обработки РЛИ могут также оцениваться скорость цели, уровень
. В ходе первичной обработки РЛИ могут также оцениваться скорость цели, уровень
Слайд 35Последовательность выполнения операций обработки РЛИ
Последовательность выполнения операций обработки РЛИ
Слайд 36Процедуры первичной и вторичной обработки состоят в принятии решений типа «да-нет» о
Процедуры первичной и вторичной обработки состоят в принятии решений типа «да-нет» о
Слайд 372. Вторичная обработка РЛИ обеспечивает принятие решения об обнаружении трассы (траектории) цели
2. Вторичная обработка РЛИ обеспечивает принятие решения об обнаружении трассы (траектории) цели
Слайд 38Вторичной обработке подвергаются радиолокационные отметки, полученные в течение нескольких обзоров воздушного пространства.
Вторичной обработке подвергаются радиолокационные отметки, полученные в течение нескольких обзоров воздушного пространства.
Слайд 39. Третичная обработка РЛИ обеспечивает объединение (обобщение) информации о воздушной обстановке (объектах),
. Третичная обработка РЛИ обеспечивает объединение (обобщение) информации о воздушной обстановке (объектах),
Слайд 40Следует отметить, что операции первичной и вторичной обработки выполняются в системе периодичности
Следует отметить, что операции первичной и вторичной обработки выполняются в системе периодичности
Слайд 41Т1.Занятие№5.Методы обзора пространства, применяемые в РЛС РТВ.(Групповое занятие).
Учебные вопросы студентам для подготовки
Учебные вопросы студентам для подготовки
Слайд 425.Какие программы обзора в РТВ получили наибольшее распространение? Раскрыть их суть.
6.Каков метод
5.Какие программы обзора в РТВ получили наибольшее распространение? Раскрыть их суть.
6.Каков метод



Слайд 46Достоинство метрового диапазона волн:
в метровом диапазоне волн больше, чем в сантиметровом
Достоинство метрового диапазона волн:
в метровом диапазоне волн больше, чем в сантиметровом
Слайд 47задание на самоподготовку
1.Изучить назначение, состав, П-18.
2.Изучить тактические и технические характеристики изделия 1РЛ131
задание на самоподготовку
1.Изучить назначение, состав, П-18.
2.Изучить тактические и технические характеристики изделия 1РЛ131
Слайд 48Литература:
Подвижная радиолокационная станция П-18,М.:Воен.издат1978.
Техническое описание изделия 1РЛ131.
Литература:
Подвижная радиолокационная станция П-18,М.:Воен.издат1978.
Техническое описание изделия 1РЛ131.
Слайд 49Контрольные вопросы
Почему в РЛС с простым сигналом применяются однокаскадные схемы построения радиопередающих
Контрольные вопросы
Почему в РЛС с простым сигналом применяются однокаскадные схемы построения радиопередающих

Слайд 51ВЧ элементы РЛС
Коаксиальные и двукоаксиальные линии передачи
Волноводы
Высокочастотные фильтры
Микрополосковые линии
Ферритовые вентили
Волноводные переключатели
Фазовращатели
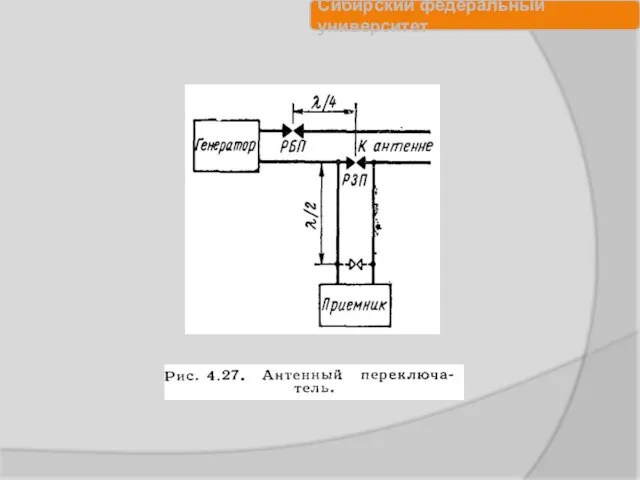
Антенные переключатели
Волноводно-коаксиальные
ВЧ элементы РЛС
Коаксиальные и двукоаксиальные линии передачи
Волноводы
Высокочастотные фильтры
Микрополосковые линии
Ферритовые вентили
Волноводные переключатели
Фазовращатели
Антенные переключатели
Волноводно-коаксиальные
Слайд 52Основные технические характеристики волноводного тракта :
1.Степень согласования волноводного тракта с нагрузкой
Основные технические характеристики волноводного тракта :
1.Степень согласования волноводного тракта с нагрузкой
Слайд 53 Параметры длинной линии
1.Длинная линия характеризуется распределенными пара-
метрами: емкостью С'[Ф/М]
Параметры длинной линии
1.Длинная линия характеризуется распределенными пара-
метрами: емкостью С'[Ф/М]
![Параметры длинной линии 1.Длинная линия характеризуется распределенными пара- метрами: емкостью С'[Ф/М] и](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/365376/slide-52.jpg)
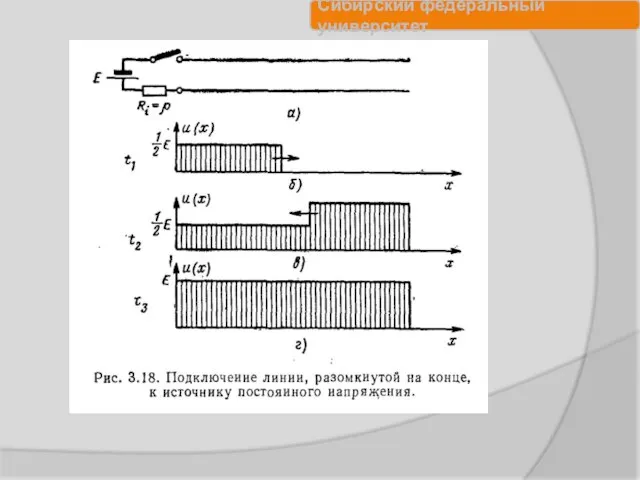
Слайд 56При подключении разомкнутой линии к источнику переменного напряжения
Первоначально от входных зажимов к
При подключении разомкнутой линии к источнику переменного напряжения
Первоначально от входных зажимов к
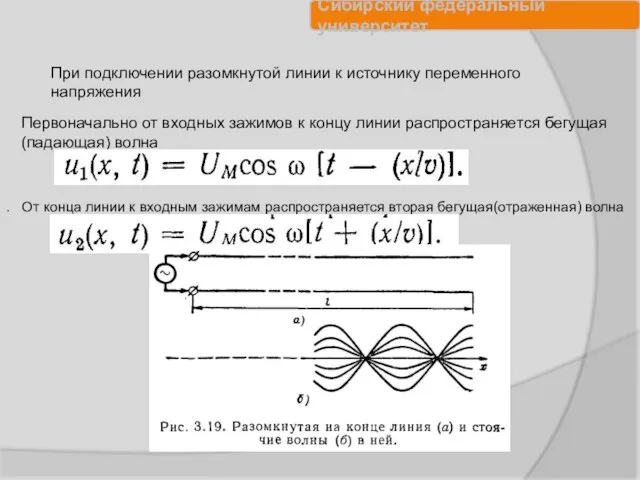
Слайд 571. Напряжения и токи в каждой точке разомкнутой длинной линии сдвинуты по
1. Напряжения и токи в каждой точке разомкнутой длинной линии сдвинуты по
Слайд 59ВЧ элементы РЛС
Коаксиальные и двукоаксиальные линии передачи
Волноводы
Высокочастотные фильтры
Микрополосковые линии
Ферритовые вентили
Волноводные переключатели
Фазовращатели
Антенные переключатели
Волноводно-коаксиальные
ВЧ элементы РЛС
Коаксиальные и двукоаксиальные линии передачи
Волноводы
Высокочастотные фильтры
Микрополосковые линии
Ферритовые вентили
Волноводные переключатели
Фазовращатели
Антенные переключатели
Волноводно-коаксиальные
Слайд 62Выводы из уравнений Д. Максвела при граничных условиях
Изменение электрического поля порождает изменение
Выводы из уравнений Д. Максвела при граничных условиях
Изменение электрического поля порождает изменение
Слайд 636. Скорость распространения электромагнитной волны зависит от диэлектрической и магнитной проницаемости среды
7.
6. Скорость распространения электромагнитной волны зависит от диэлектрической и магнитной проницаемости среды
7.
Слайд 64Волноводы характеризуют типом волны, устанавливающейся в поперечном сечении:
1. В поперечном направлении действует
Волноводы характеризуют типом волны, устанавливающейся в поперечном сечении:
1. В поперечном направлении действует
Слайд 65Фидерная линия – двухпроводная линия, предназначенная для передачи энергии высоких частот.
Длинными линиями
Фидерная линия – двухпроводная линия, предназначенная для передачи энергии высоких частот.
Длинными линиями

Слайд 75Антенна – устройство предназначенное для излучения и приема электромагнитной энергии, представляющее собой
Антенна – устройство предназначенное для излучения и приема электромагнитной энергии, представляющее собой
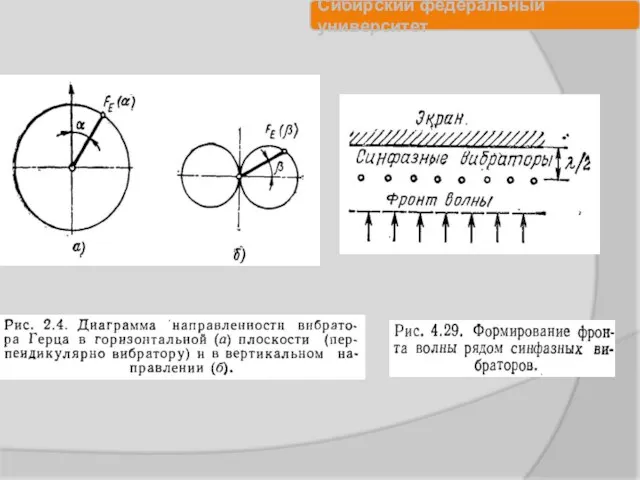
Слайд 78-коэффициент направленного действи
-телесный угол
.- Ширина луча в горизонтальной и вертикальной плоскостях
-коэффициент направленного действи
-телесный угол
.- Ширина луча в горизонтальной и вертикальной плоскостях
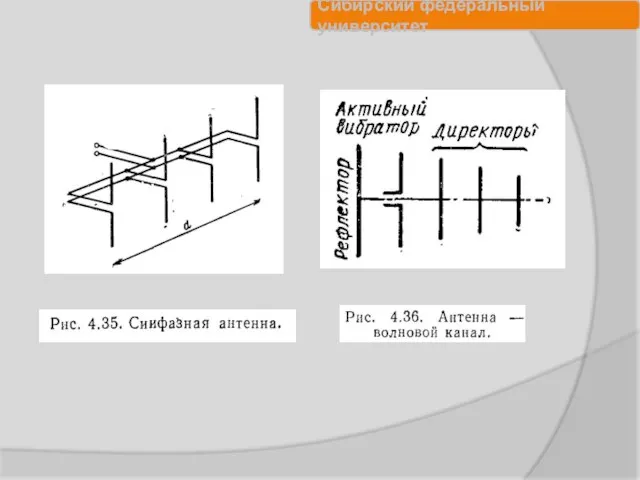

Слайд 82Рис. Волновой канал антенны (стрела)
Рис. Волновой канал антенны (стрела)
Слайд 85Антенны дальномера и высотомера представляют собой плоские антенные
решетки полуволновых вибраторов, параллельные
Антенны дальномера и высотомера представляют собой плоские антенные
решетки полуволновых вибраторов, параллельные
 Уже в продаже
Уже в продаже Презентация на тему Житие Сергия Радонежского
Презентация на тему Житие Сергия Радонежского Схема организационной структуры ОАО Новосверженский лесозавод (вводится в действие с 01.02.2019)
Схема организационной структуры ОАО Новосверженский лесозавод (вводится в действие с 01.02.2019) Как избежать конфликта
Как избежать конфликта Бюро Оценки Достоверности Информации ПРЕЗЕНТАЦИЯ
Бюро Оценки Достоверности Информации ПРЕЗЕНТАЦИЯ О формировании Единого таможенного тарифа и мерах нетарифного регулирования в рамках Таможенного союза
О формировании Единого таможенного тарифа и мерах нетарифного регулирования в рамках Таможенного союза Социальное партнерство: понятие, принципы, условия и компоненты
Социальное партнерство: понятие, принципы, условия и компоненты Управление коммуникациями в проекте
Управление коммуникациями в проекте Презентация на тему Гражданское общество
Презентация на тему Гражданское общество EcoBirds
EcoBirds Презентация на тему Героическая оборона Смоленска 1609-1611 годов
Презентация на тему Героическая оборона Смоленска 1609-1611 годов  IL Decameron
IL Decameron Программа внеаудиторной занятости методического объединения учителей естественно-научного цикла
Программа внеаудиторной занятости методического объединения учителей естественно-научного цикла Самые опасные животные
Самые опасные животные Lektsia_po_stipendiam
Lektsia_po_stipendiam Тарас Бульба
Тарас Бульба МИТРОФАНОВА ТАТЬЯНА ПАВЛОВНА МОУ гимназия №35 Научный руководитель к.п.н. Пивнева С.В. к.п.н. Витк
МИТРОФАНОВА ТАТЬЯНА ПАВЛОВНА МОУ гимназия №35 Научный руководитель к.п.н. Пивнева С.В. к.п.н. Витк Защита от проникновения. ЧОП Талион
Защита от проникновения. ЧОП Талион Презентация на тему: Писатель из Солнечного города
Презентация на тему: Писатель из Солнечного города Основные понятия в управлении материально-техническими ресурсами
Основные понятия в управлении материально-техническими ресурсами Семейный кодекс
Семейный кодекс Omar Khayyam
Omar Khayyam Arenta. Смарт-офис
Arenta. Смарт-офис Обследование звукопроизношения
Обследование звукопроизношения Экологическая опасность атомной энергетики
Экологическая опасность атомной энергетики В мире кислот
В мире кислот Об утверждении порядка проведения профилактического медицинского осмотра и диспансеризации определённых групп
Об утверждении порядка проведения профилактического медицинского осмотра и диспансеризации определённых групп Использование компьютера как инструмента образовательного процесса
Использование компьютера как инструмента образовательного процесса