- От адаптивного управления до искусственного интеллекта

Содержание
- 2. Адаптивное управление Управление в функции от текущей информации о внешней среде «Очувствление» робота – наличие сенсорных
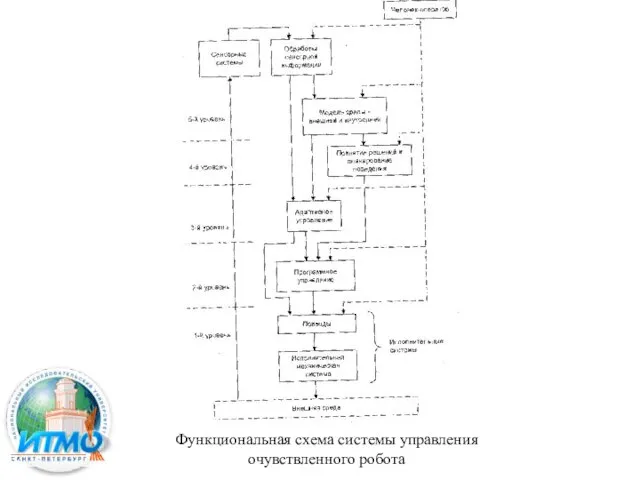
- 3. Функциональная схема системы управления очувствленного робота
- 4. Интеллектуальное управление – высшая ступень управления в теории автоматического управления после программного и адаптивного. Задачи в
- 5. Исследования когнитивной эволюции – эволюции познавательных способностей биологических организмов. Естественнонаучная основа будущих разработок искусственного интеллекта Модели
- 6. Построение математических и компьютерных моделей «интеллектуальных изобретений» биологической эволюции безусловный рефлекс привыкание (угасание реакции на биологически
- 7. Почему эти исследования актуальны А) Интересны с естественнонаучной точки зрения. Интеллект, мышление, логика — основа когнитивных,
- 8. Модели адаптивного поведения 1990-е годы Аниматы (animal+robot) - искусственные "организмы", способные приспосабливаться к внешней среде Бионический
- 9. Программа-минимум направления "Адаптивное поведение" — исследовать архитектуры и принципы функционирования, которые позволяют животным или роботам жить
- 10. В исследованиях АП используется ряд нетривиальных компьютерных методов: − нейронные сети − генетический алгоритм и другие
- 11. Российские исследователи: – модели поискового адаптивного поведения (В.А. Непомнящих, Институт биологии внутренних вод им. И.Д. Папанина
- 12. Проект "Мозг анимата" Формирование общей схемы построения моделей Теория функциональных систем П.К. Анохина Целенаправленное адаптивное поведение
- 13. Исследователи адаптивного поведения − AnimatLab (Париж, руководитель — один из инициаторов данного направления Жан - Аркадий
- 14. − Институт нейронаук Дж. Эдельмана (http://www.nsi.edu/ ) Разработки поколений моделей работы мозга (Darwin I, Darwin II,…)
- 15. − Лаборатория информатики и искусственного интеллекта в Массачусетском технологическом институте (руководитель Родни Брукс) (http://www.csail.mit.edu/ )
- 16. Лаборатория искусственного интеллекта в университете Цюриха (руководитель Рольф Пфейфер) - www.ifi.unizh.ch/groups/ailab/ Основной подход этой лаборатории— познание
- 17. ROBOY – the most modern tendon driven robot of the world
- 18. ROBOY`s first handshake – www.roboy.org
- 20. Скачать презентацию
Слайд 2Адаптивное управление
Управление в функции от текущей информации о внешней среде
«Очувствление» робота –
Адаптивное управление
Управление в функции от текущей информации о внешней среде
«Очувствление» робота –
Слайд 3Функциональная схема системы управления
очувствленного робота
Функциональная схема системы управления
очувствленного робота
Слайд 4Интеллектуальное управление – высшая ступень управления в теории автоматического управления после программного
Интеллектуальное управление – высшая ступень управления в теории автоматического управления после программного
Слайд 5Исследования когнитивной эволюции – эволюции познавательных способностей биологических организмов.
Естественнонаучная основа
будущих разработок
Исследования когнитивной эволюции – эволюции познавательных способностей биологических организмов. Естественнонаучная основа будущих разработок
Слайд 6Построение математических и компьютерных моделей «интеллектуальных изобретений» биологической эволюции
безусловный рефлекс
привыкание (угасание реакции
Построение математических и компьютерных моделей «интеллектуальных изобретений» биологической эволюции
безусловный рефлекс
привыкание (угасание реакции
Слайд 7Почему эти исследования актуальны
А) Интересны с естественнонаучной точки зрения. Интеллект, мышление, логика
Почему эти исследования актуальны
А) Интересны с естественнонаучной точки зрения. Интеллект, мышление, логика
Слайд 8Модели адаптивного поведения
1990-е годы
Аниматы
(animal+robot) -
искусственные "организмы", способные приспосабливаться к внешней
Модели адаптивного поведения
1990-е годы
Аниматы
(animal+robot) -
искусственные "организмы", способные приспосабливаться к внешней
Слайд 9Программа-минимум направления "Адаптивное поведение" — исследовать архитектуры и принципы функционирования, которые позволяют
Программа-минимум направления "Адаптивное поведение" — исследовать архитектуры и принципы функционирования, которые позволяют
Слайд 10В исследованиях АП используется ряд нетривиальных компьютерных методов:
− нейронные сети
− генетический алгоритм
В исследованиях АП используется ряд нетривиальных компьютерных методов:
− нейронные сети
− генетический алгоритм
Слайд 11Российские исследователи:
– модели поискового адаптивного поведения (В.А. Непомнящих, Институт биологии внутренних вод
Российские исследователи:
– модели поискового адаптивного поведения (В.А. Непомнящих, Институт биологии внутренних вод
Слайд 12Проект "Мозг анимата"
Формирование общей схемы построения моделей
Теория функциональных систем П.К. Анохина
Целенаправленное
Проект "Мозг анимата"
Формирование общей схемы построения моделей
Теория функциональных систем П.К. Анохина
Целенаправленное
Слайд 13Исследователи адаптивного поведения
− AnimatLab (Париж, руководитель — один из инициаторов данного направления
Исследователи адаптивного поведения
− AnimatLab (Париж, руководитель — один из инициаторов данного направления
Слайд 14− Институт нейронаук Дж. Эдельмана (http://www.nsi.edu/ )
Разработки поколений моделей работы мозга (Darwin
− Институт нейронаук Дж. Эдельмана (http://www.nsi.edu/ )
Разработки поколений моделей работы мозга (Darwin
Слайд 15− Лаборатория информатики и искусственного интеллекта в Массачусетском технологическом институте (руководитель Родни
− Лаборатория информатики и искусственного интеллекта в Массачусетском технологическом институте (руководитель Родни
Слайд 16Лаборатория искусственного интеллекта в университете Цюриха
(руководитель Рольф Пфейфер) - www.ifi.unizh.ch/groups/ailab/
Основной подход
Лаборатория искусственного интеллекта в университете Цюриха
(руководитель Рольф Пфейфер) - www.ifi.unizh.ch/groups/ailab/
Основной подход
Слайд 17ROBOY – the most modern tendon driven robot of the world
ROBOY – the most modern tendon driven robot of the world
Слайд 18ROBOY`s first handshake – www.roboy.org
ROBOY`s first handshake – www.roboy.org
 Восточные танцы
Восточные танцы О клубе «ЛИДЕР» Евразийского национального университета им. Л.Н. Гумилева Основной целью клуба является: Развитие и совершенствов
О клубе «ЛИДЕР» Евразийского национального университета им. Л.Н. Гумилева Основной целью клуба является: Развитие и совершенствов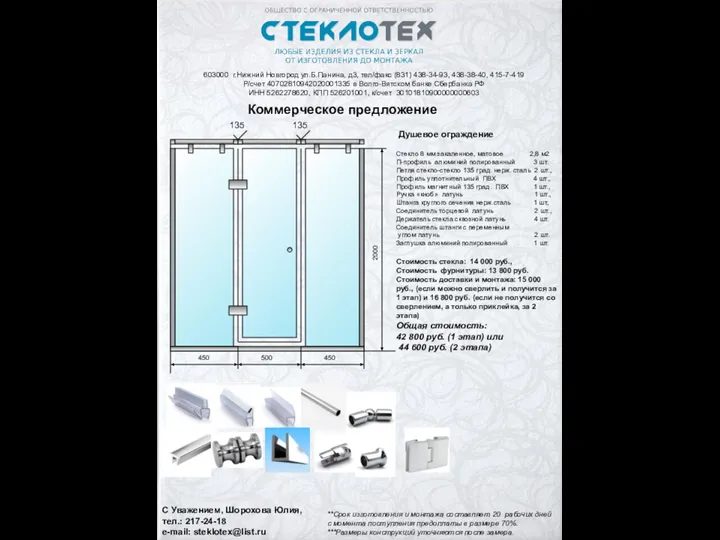 Душевая перегородка 135 гр
Душевая перегородка 135 гр Всероссийский правовой диктант
Всероссийский правовой диктант Курс лекций по теоретической механике
Курс лекций по теоретической механике Степень с целым показателем
Степень с целым показателем Викторина Колосок
Викторина Колосок Навык быть гибким
Навык быть гибким Султанат Оман. Особенности конституционной истории и общественного строя Омана
Султанат Оман. Особенности конституционной истории и общественного строя Омана Миссия среди молодежи в условиях пандемии: духовные уроки и их осмысление
Миссия среди молодежи в условиях пандемии: духовные уроки и их осмысление Робототехника. Лифт
Робототехника. Лифт ЭЛЕКТРОННАЯ ЧЕХОВИАНА
ЭЛЕКТРОННАЯ ЧЕХОВИАНА Зачем нужны знаки препинания
Зачем нужны знаки препинания Шестнадцатое мартаКлассная работа
Шестнадцатое мартаКлассная работа Презентация на тему Световая фаза фотосинтеза (9 класс)
Презентация на тему Световая фаза фотосинтеза (9 класс) История Конституции Российской Федерации. Содержание Проекты Конституции декабристов Демократическая Конституция России Значен
История Конституции Российской Федерации. Содержание Проекты Конституции декабристов Демократическая Конституция России Значен Что такое созависимость
Что такое созависимость Качество образования через метаметодику
Качество образования через метаметодику Тема исследования:«Её Величество – пунктуация»
Тема исследования:«Её Величество – пунктуация» Организация архитектурно-ландшафтного пространства
Организация архитектурно-ландшафтного пространства Настройка харвестерной головки Н7
Настройка харвестерной головки Н7 Жевательная резинка
Жевательная резинка  Борис Николаевич Ельцин
Борис Николаевич Ельцин Реализация ФГОС. Стандарты второго поколения
Реализация ФГОС. Стандарты второго поколения Презентация на тему Экзамен без стресса
Презентация на тему Экзамен без стресса Implementarea listelor simplu inlantuite
Implementarea listelor simplu inlantuite Использование информационных технологий в школьном курсе предмета «черчение»
Использование информационных технологий в школьном курсе предмета «черчение» Результаты диагностики познавательной сферы в 6 классе
Результаты диагностики познавательной сферы в 6 классе