- Ответы на проверочную работу нач. ур

Содержание
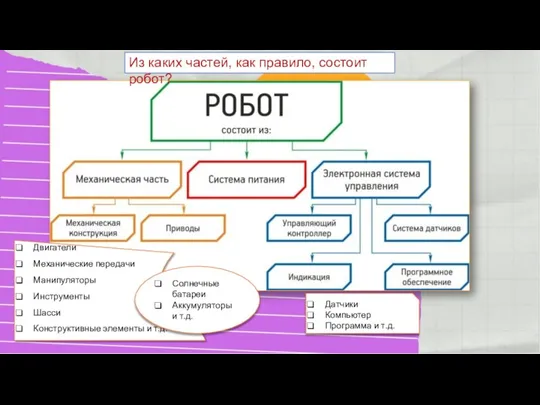
- 2. Двигатели Механические передачи Манипуляторы Инструменты Шасси Конструктивные элементы и т.д. Датчики Компьютер Программа и т.д. Солнечные
- 3. Как подключить нашего робота, если через технологию bluetooth не получается? Через провод (USB) Как? Разъем Mini-USB
- 4. Можно ли задавать во времени работы мотора отрицательные значения секунд? Нет! Как?
- 5. Можно ли задавать мотору отрицательную мощность? Да, так можно управлять направлением движения робота: отрицательная скорость –
- 6. Можно ли задавать мотору отрицательное количество оборотов? Да, так можно управлять направлением движения робота: отрицательное количество
- 7. Можно ли задавать отрицательное количество градусов мотору робота? Да, по аналогии с количеством оборотов (то, на
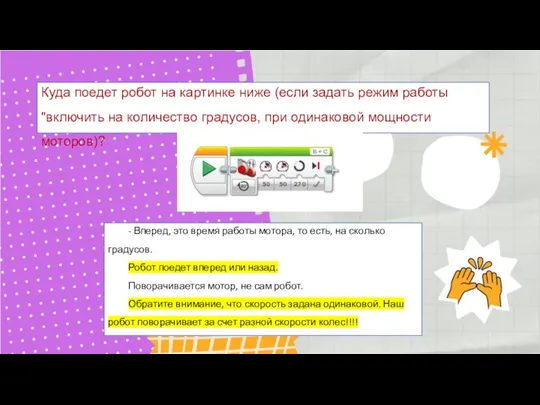
- 8. Куда поедет робот на картинке ниже (если задать режим работы "включить на количество градусов, при одинаковой
- 9. Что такое механические передачи? Механической передачей называют устройство для передачи механического движения от двигателя к исполнительным
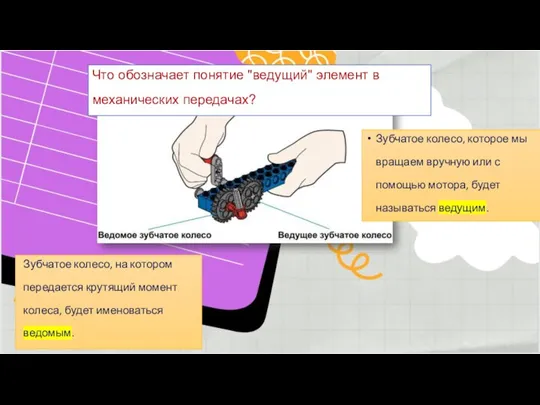
- 10. Зубчатое колесо, на котором передается крутящий момент колеса, будет именоваться ведомым. Зубчатое колесо, которое мы вращаем
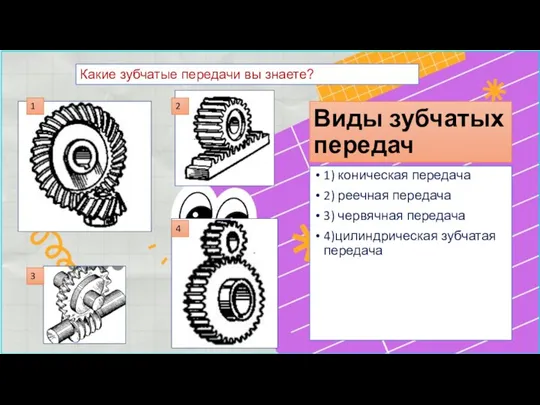
- 11. Какие зубчатые передачи вы знаете? Виды зубчатых передач 1) коническая передача 2) реечная передача 3) червячная
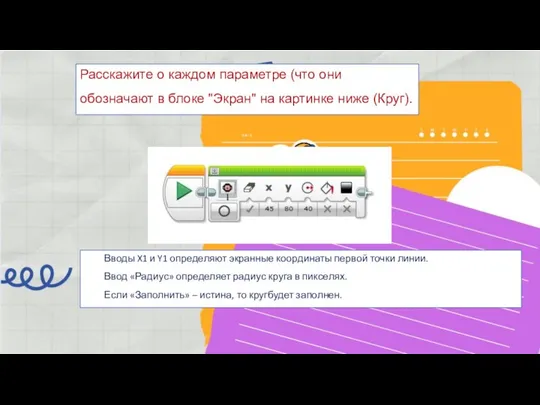
- 12. Расскажите о каждом параметре (что они обозначают в блоке "Экран" на картинке ниже (Круг). Вводы X1
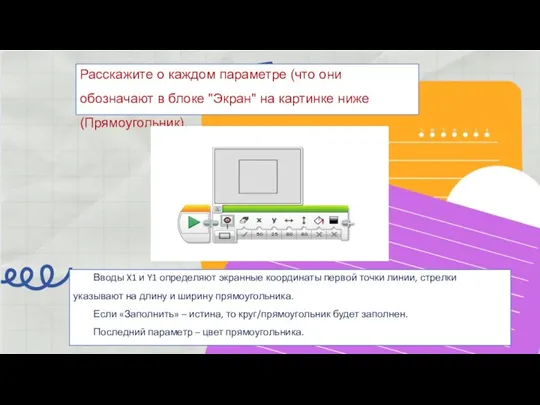
- 13. Расскажите о каждом параметре (что они обозначают в блоке "Экран" на картинке ниже (Прямоугольник). Вводы X1
- 14. Какие режимы работы робота (в среде программирования) вы знаете? Включить Выключить Включить на количество секунд Включить
- 15. За счет чего поворачивает робот Ev3 (как сделать так, чтобы он повернул)? В автомобиле поворот осуществляется
- 16. Как называются блоки, которыми можно запрограммировать сразу два мотора? Рулевое управление Независимое управление моторами
- 17. Какие шасси могут быть у робота (3 любых варианта)? Колесные Гусеничные Летающие
- 18. К каким разъемам подключаются моторы? Где буквы A, B, C, D
- 19. Зачем нужны повышающие и понижающие зубчатые передачи? Зубчатые повышающие передачи служат для увеличения скорости, но в
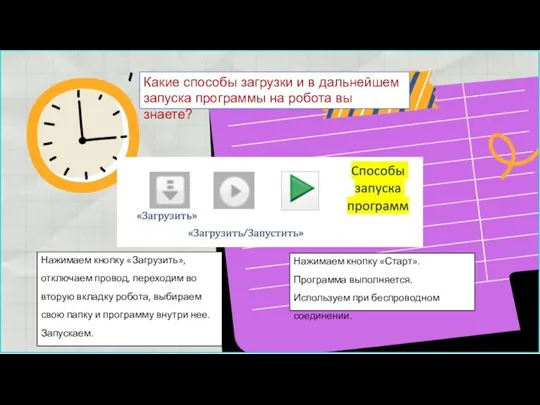
- 20. Какие способы загрузки и в дальнейшем запуска программы на робота вы знаете? Нажимаем кнопку «Загрузить», отключаем
- 22. Скачать презентацию
Слайд 2Двигатели
Механические передачи
Манипуляторы
Инструменты
Шасси
Конструктивные элементы и т.д.
Датчики
Компьютер
Программа и т.д.
Солнечные батареи
Аккумуляторы и т.д.
Из каких частей,
Двигатели
Механические передачи
Манипуляторы
Инструменты
Шасси
Конструктивные элементы и т.д.
Датчики
Компьютер
Программа и т.д.
Солнечные батареи
Аккумуляторы и т.д.
Из каких частей,
Слайд 3Как подключить нашего робота, если через технологию bluetooth не получается?
Через провод (USB)
Как подключить нашего робота, если через технологию bluetooth не получается?
Через провод (USB)
Слайд 4Можно ли задавать во времени работы мотора отрицательные значения секунд?
Нет! Как?
Можно ли задавать во времени работы мотора отрицательные значения секунд?
Нет! Как?
Слайд 5Можно ли задавать мотору отрицательную мощность?
Да, так можно управлять направлением движения робота:
Можно ли задавать мотору отрицательную мощность?
Да, так можно управлять направлением движения робота:
Слайд 6Можно ли задавать мотору отрицательное количество оборотов?
Да, так можно управлять направлением движения
Можно ли задавать мотору отрицательное количество оборотов?
Да, так можно управлять направлением движения
Слайд 7Можно ли задавать отрицательное количество градусов мотору робота?
Да, по аналогии с количеством
Можно ли задавать отрицательное количество градусов мотору робота?
Да, по аналогии с количеством
Слайд 8Куда поедет робот на картинке ниже (если задать режим работы "включить на
Куда поедет робот на картинке ниже (если задать режим работы "включить на
Слайд 9Что такое механические передачи?
Механической передачей называют устройство для передачи механического движения от
Что такое механические передачи?
Механической передачей называют устройство для передачи механического движения от
Слайд 10Зубчатое колесо, на котором передается крутящий момент колеса, будет именоваться ведомым.
Зубчатое колесо,
Зубчатое колесо, на котором передается крутящий момент колеса, будет именоваться ведомым.
Зубчатое колесо,
Слайд 11Какие зубчатые передачи вы знаете?
Виды зубчатых передач
1) коническая передача
2) реечная передача
3) червячная
Какие зубчатые передачи вы знаете?
Виды зубчатых передач
1) коническая передача
2) реечная передача
3) червячная
Слайд 12Расскажите о каждом параметре (что они обозначают в блоке "Экран" на картинке
Расскажите о каждом параметре (что они обозначают в блоке "Экран" на картинке
Слайд 13Расскажите о каждом параметре (что они обозначают в блоке "Экран" на картинке
Расскажите о каждом параметре (что они обозначают в блоке "Экран" на картинке
Слайд 14Какие режимы работы робота (в среде программирования) вы знаете?
Включить
Выключить
Включить на количество секунд
Включить
Какие режимы работы робота (в среде программирования) вы знаете?
Включить
Выключить
Включить на количество секунд
Включить
Слайд 15За счет чего поворачивает робот Ev3 (как сделать так, чтобы он повернул)?
В
За счет чего поворачивает робот Ev3 (как сделать так, чтобы он повернул)?
В
Слайд 16Как называются блоки, которыми можно запрограммировать сразу два мотора?
Рулевое управление
Независимое управление моторами
Как называются блоки, которыми можно запрограммировать сразу два мотора?
Рулевое управление
Независимое управление моторами
Слайд 17Какие шасси могут быть у робота (3 любых варианта)?
Колесные
Гусеничные
Летающие
Какие шасси могут быть у робота (3 любых варианта)?
Колесные
Гусеничные
Летающие
Слайд 18К каким разъемам подключаются моторы?
Где буквы A, B, C, D
К каким разъемам подключаются моторы?
Где буквы A, B, C, D
Слайд 19Зачем нужны повышающие и понижающие зубчатые передачи?
Зубчатые повышающие передачи служат для увеличения
Зачем нужны повышающие и понижающие зубчатые передачи?
Зубчатые повышающие передачи служат для увеличения
Слайд 20Какие способы загрузки и в дальнейшем запуска программы на робота вы знаете?
Нажимаем
Какие способы загрузки и в дальнейшем запуска программы на робота вы знаете?
Нажимаем
 Догосударственный период в истории восточных славян
Догосударственный период в истории восточных славян Предельные одноосновные карбоновые кислоты
Предельные одноосновные карбоновые кислоты В.И. Гау. Николай I на смертном одре.
В.И. Гау. Николай I на смертном одре. Як оплатити рахунки через інтернет? СЕРВІСИ САЙТУ DOMIVKA.IF.UA
Як оплатити рахунки через інтернет? СЕРВІСИ САЙТУ DOMIVKA.IF.UA Нурсултан Назарбаев
Нурсултан Назарбаев  Тестовая презентация
Тестовая презентация Природно-ресурсный потенциал равнинных территорий
Природно-ресурсный потенциал равнинных территорий ДЕМОГРАФИЧЕСКАЯ СИТУАЦИЯ В РОССИЙСКОЙ ФЕДЕРАЦИИ. УРОК ОБЩЕСТВОЗНАНИЯ В 11 КЛАССЕ. ПРОФИЛЬНЫЙ УРОВЕНЬ. УЧИТЕЛЬ СМИРНОВ ЕВГЕНИЙ
ДЕМОГРАФИЧЕСКАЯ СИТУАЦИЯ В РОССИЙСКОЙ ФЕДЕРАЦИИ. УРОК ОБЩЕСТВОЗНАНИЯ В 11 КЛАССЕ. ПРОФИЛЬНЫЙ УРОВЕНЬ. УЧИТЕЛЬ СМИРНОВ ЕВГЕНИЙ Чем отличается малый бизнес от бизнеса большого?
Чем отличается малый бизнес от бизнеса большого? Природа и структура конфликта
Природа и структура конфликта Дни Крыма в Харькове семинар для врачей пресс-конференция в Харьковской обл. администрации.
Дни Крыма в Харькове семинар для врачей пресс-конференция в Харьковской обл. администрации. Организация деятельности
Организация деятельности Режиссёрские приёмы в творчестве Роберта Родригеса
Режиссёрские приёмы в творчестве Роберта Родригеса фемпикник
фемпикник Процессный подход
Процессный подход  Учитель начальных классов второй квалификационной категории МОУ «Средняя общеобразовательная школа 3 р.п. Линёво»
Учитель начальных классов второй квалификационной категории МОУ «Средняя общеобразовательная школа 3 р.п. Линёво» ПЛЮСЫ И МИНУСЫсъедобных сувениров
ПЛЮСЫ И МИНУСЫсъедобных сувениров Рубежная диагностическая работа
Рубежная диагностическая работа Tibbi-Sosial Ekspertiza Komissiyalarının həkim heyətinin imtahan nəticələrinin analizi
Tibbi-Sosial Ekspertiza Komissiyalarının həkim heyətinin imtahan nəticələrinin analizi Презентация на тему Мастера печатных дел (4 класс)
Презентация на тему Мастера печатных дел (4 класс) Изготовление контактных линз
Изготовление контактных линз Кислоты 8 класс
Кислоты 8 класс Диета
Диета Тайны Японских Гейш
Тайны Японских Гейш Технология саморазвития личности
Технология саморазвития личности Презентация 13
Презентация 13 Инновационность педагогических технологий и учебно-методических материалов для обучения иностранному языку в неязыковом вузе
Инновационность педагогических технологий и учебно-методических материалов для обучения иностранному языку в неязыковом вузе Доступный уровень интерактивной коммуникациипроекторы с короткофокусным объективомMitsubishi XD365U-EST и WD385U-EST
Доступный уровень интерактивной коммуникациипроекторы с короткофокусным объективомMitsubishi XD365U-EST и WD385U-EST